JP4792302B2 - 周期性信号の適応制御装置 - Google Patents
周期性信号の適応制御装置 Download PDFInfo
- Publication number
- JP4792302B2 JP4792302B2 JP2006054879A JP2006054879A JP4792302B2 JP 4792302 B2 JP4792302 B2 JP 4792302B2 JP 2006054879 A JP2006054879 A JP 2006054879A JP 2006054879 A JP2006054879 A JP 2006054879A JP 4792302 B2 JP4792302 B2 JP 4792302B2
- Authority
- JP
- Japan
- Prior art keywords
- target value
- filter coefficient
- virtual
- residual
- signal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images


Classifications
-
- G—PHYSICS
- G10—MUSICAL INSTRUMENTS; ACOUSTICS
- G10K—SOUND-PRODUCING DEVICES; METHODS OR DEVICES FOR PROTECTING AGAINST, OR FOR DAMPING, NOISE OR OTHER ACOUSTIC WAVES IN GENERAL; ACOUSTICS NOT OTHERWISE PROVIDED FOR
- G10K11/00—Methods or devices for transmitting, conducting or directing sound in general; Methods or devices for protecting against, or for damping, noise or other acoustic waves in general
- G10K11/16—Methods or devices for protecting against, or for damping, noise or other acoustic waves in general
- G10K11/175—Methods or devices for protecting against, or for damping, noise or other acoustic waves in general using interference effects; Masking sound
- G10K11/178—Methods or devices for protecting against, or for damping, noise or other acoustic waves in general using interference effects; Masking sound by electro-acoustically regenerating the original acoustic waves in anti-phase
- G10K11/1781—Methods or devices for protecting against, or for damping, noise or other acoustic waves in general using interference effects; Masking sound by electro-acoustically regenerating the original acoustic waves in anti-phase characterised by the analysis of input or output signals, e.g. frequency range, modes, transfer functions
- G10K11/17813—Methods or devices for protecting against, or for damping, noise or other acoustic waves in general using interference effects; Masking sound by electro-acoustically regenerating the original acoustic waves in anti-phase characterised by the analysis of input or output signals, e.g. frequency range, modes, transfer functions characterised by the analysis of the acoustic paths, e.g. estimating, calibrating or testing of transfer functions or cross-terms
- G10K11/17815—Methods or devices for protecting against, or for damping, noise or other acoustic waves in general using interference effects; Masking sound by electro-acoustically regenerating the original acoustic waves in anti-phase characterised by the analysis of input or output signals, e.g. frequency range, modes, transfer functions characterised by the analysis of the acoustic paths, e.g. estimating, calibrating or testing of transfer functions or cross-terms between the reference signals and the error signals, i.e. primary path
-
- G—PHYSICS
- G10—MUSICAL INSTRUMENTS; ACOUSTICS
- G10K—SOUND-PRODUCING DEVICES; METHODS OR DEVICES FOR PROTECTING AGAINST, OR FOR DAMPING, NOISE OR OTHER ACOUSTIC WAVES IN GENERAL; ACOUSTICS NOT OTHERWISE PROVIDED FOR
- G10K11/00—Methods or devices for transmitting, conducting or directing sound in general; Methods or devices for protecting against, or for damping, noise or other acoustic waves in general
- G10K11/16—Methods or devices for protecting against, or for damping, noise or other acoustic waves in general
- G10K11/175—Methods or devices for protecting against, or for damping, noise or other acoustic waves in general using interference effects; Masking sound
- G10K11/178—Methods or devices for protecting against, or for damping, noise or other acoustic waves in general using interference effects; Masking sound by electro-acoustically regenerating the original acoustic waves in anti-phase
- G10K11/1781—Methods or devices for protecting against, or for damping, noise or other acoustic waves in general using interference effects; Masking sound by electro-acoustically regenerating the original acoustic waves in anti-phase characterised by the analysis of input or output signals, e.g. frequency range, modes, transfer functions
- G10K11/17821—Methods or devices for protecting against, or for damping, noise or other acoustic waves in general using interference effects; Masking sound by electro-acoustically regenerating the original acoustic waves in anti-phase characterised by the analysis of input or output signals, e.g. frequency range, modes, transfer functions characterised by the analysis of the input signals only
- G10K11/17825—Error signals
-
- G—PHYSICS
- G10—MUSICAL INSTRUMENTS; ACOUSTICS
- G10K—SOUND-PRODUCING DEVICES; METHODS OR DEVICES FOR PROTECTING AGAINST, OR FOR DAMPING, NOISE OR OTHER ACOUSTIC WAVES IN GENERAL; ACOUSTICS NOT OTHERWISE PROVIDED FOR
- G10K11/00—Methods or devices for transmitting, conducting or directing sound in general; Methods or devices for protecting against, or for damping, noise or other acoustic waves in general
- G10K11/16—Methods or devices for protecting against, or for damping, noise or other acoustic waves in general
- G10K11/175—Methods or devices for protecting against, or for damping, noise or other acoustic waves in general using interference effects; Masking sound
- G10K11/178—Methods or devices for protecting against, or for damping, noise or other acoustic waves in general using interference effects; Masking sound by electro-acoustically regenerating the original acoustic waves in anti-phase
- G10K11/1785—Methods, e.g. algorithms; Devices
- G10K11/17853—Methods, e.g. algorithms; Devices of the filter
- G10K11/17854—Methods, e.g. algorithms; Devices of the filter the filter being an adaptive filter
-
- G—PHYSICS
- G10—MUSICAL INSTRUMENTS; ACOUSTICS
- G10K—SOUND-PRODUCING DEVICES; METHODS OR DEVICES FOR PROTECTING AGAINST, OR FOR DAMPING, NOISE OR OTHER ACOUSTIC WAVES IN GENERAL; ACOUSTICS NOT OTHERWISE PROVIDED FOR
- G10K11/00—Methods or devices for transmitting, conducting or directing sound in general; Methods or devices for protecting against, or for damping, noise or other acoustic waves in general
- G10K11/16—Methods or devices for protecting against, or for damping, noise or other acoustic waves in general
- G10K11/175—Methods or devices for protecting against, or for damping, noise or other acoustic waves in general using interference effects; Masking sound
- G10K11/178—Methods or devices for protecting against, or for damping, noise or other acoustic waves in general using interference effects; Masking sound by electro-acoustically regenerating the original acoustic waves in anti-phase
- G10K11/1787—General system configurations
- G10K11/17879—General system configurations using both a reference signal and an error signal
- G10K11/17883—General system configurations using both a reference signal and an error signal the reference signal being derived from a machine operating condition, e.g. engine RPM or vehicle speed
-
- G—PHYSICS
- G10—MUSICAL INSTRUMENTS; ACOUSTICS
- G10K—SOUND-PRODUCING DEVICES; METHODS OR DEVICES FOR PROTECTING AGAINST, OR FOR DAMPING, NOISE OR OTHER ACOUSTIC WAVES IN GENERAL; ACOUSTICS NOT OTHERWISE PROVIDED FOR
- G10K2210/00—Details of active noise control [ANC] covered by G10K11/178 but not provided for in any of its subgroups
- G10K2210/10—Applications
- G10K2210/129—Vibration, e.g. instead of, or in addition to, acoustic noise
- G10K2210/1291—Anti-Vibration-Control, e.g. reducing vibrations in panels or beams
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Acoustics & Sound (AREA)
- Multimedia (AREA)
- Feedback Control In General (AREA)
- Vibration Prevention Devices (AREA)
- Soundproofing, Sound Blocking, And Sound Damping (AREA)
Description

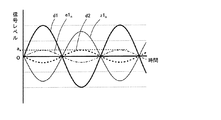
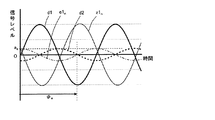
周期性信号の適応制御装置1(以下、「適応制御装置」という)の概略について、図1〜図3を参照して説明する。図1は、第1実施形態及び第2実施形態の周期性信号の適応制御装置1のブロック図を示す。図2は、位相目標値を設定していない場合について説明する図である。図3は、位相目標値を設定した場合について説明する図である。
次に、第1実施形態の適応制御装置1の詳細構成について、図1を参照して説明する。ここで、第1実施形態の適応制御装置1は、残差目標値etargetnが予め記憶されている場合であって、残差目標値etargetnには振幅目標値aeを含むが、位相目標値φeを含まない場合である。
上記第1実施形態においては、適応信号y1nは、一次正弦波としたが、複数の次数成分を含む周期性信号としてもよい。この場合の適応信号y1nは、式(59)にて表すことができる。
また、上記第1実施形態において、第1フィルタ係数更新部15における第1位相フィルタ係数φ1nの更新式(55)を下記の式(60)に置き換えてもよい。この更新式(60)は、上記第1実施形態における更新式(55)の第1伝達特性G1の伝達関数の推定値の振幅成分Ah1及び第1振幅フィルタ係数a1nを消去した式である。
次に、第2実施形態の適応制御装置1の詳細構成について説明する。ここで、第2実施形態の適応制御装置1は、残差目標値etargetnが予め記憶されている場合であって、残差目標値etargetnには振幅目標値ae及び位相目標値φeを含む場合である。この第2実施形態の適応制御装置1の構成は、上述した第1実施形態の適応制御装置1の構成と同一構成からなる。ただし、観測点目標値設定部14が異なる。以下、第1実施形態と異なる点のみについて説明する。
次に、第3実施形態の適応制御装置100の詳細構成について、図4を参照して説明する。ここで、第3実施形態の適応制御装置100は、残差目標値etargetnが適応的に設定される場合であって、残差目標値etargetnには振幅目標値aeを含むが、位相目標値φeを含まない場合である。
また、上記第3実施形態において、第2フィルタ係数更新部115における第2位相フィルタ係数φ2nの更新式(65)を下記の式(68)に置き換えてもよい。この更新式(68)は、上記第3実施形態における更新式(65)の仮想伝達特性の伝達関数の推定値の振幅成分Ah2及び第2振幅フィルタ係数a2nを消去した式である。
次に、第4実施形態の適応制御装置100の詳細構成について説明する。ここで、第4実施形態の適応制御装置100は、残差目標値etargetnが適応的に設定される場合であって、残差目標値etargetnには振幅目標値ae及び位相目標値φeを含む場合である。この第4実施形態の適応制御装置100の構成は、上述した第3実施形態の適応制御装置100の構成と同一構成からなる。ただし、更新目標値設定部116が異なる。以下、第3実施形態と異なる点のみについて説明する。
3:対象評価点、 7:第1観測点、 8:第2観測点、 9:仮想観測点
Claims (9)
- 振動発生源から発生される周期性信号に対して該周期性信号に同期する適応信号を加えることにより、前記周期性信号が所定の伝達経路を経由して対象評価点に及ぼす影響を能動的に低減する周期性信号の適応制御装置であって、
前記所定の伝達経路は、第1伝達経路及び前記第1伝達経路と異なる第2伝達経路を含み、
前記周期性信号のうち特定周波数成分の角振動数に基づき、第1振幅フィルタ係数及び第1位相フィルタ係数を構成成分に含む前記適応信号を前記第1伝達経路中に発生させる適応信号発生部と、
前記第1伝達経路中のうち前記適応信号発生部と前記対象評価点との間に位置する第1観測点において、前記周期性信号に対して前記適応信号を所定の第1伝達特性を介して加えることにより生じる第1の残差を検出する第1残差検出部と、
少なくとも前記角振動数に応じた振幅目標値を含む前記第1観測点の周期性の残差目標値であって、前記角振動数および前記第2伝達経路の伝達特性に基づき前記残差目標値を設定する観測点目標値設定部と、
前記角振動数、前記第1の残差及び前記残差目標値に基づき前記第1振幅フィルタ係数及び前記第1位相フィルタ係数を更新する第1フィルタ係数更新部と、
を備えることを特徴とする周期性信号の適応制御装置。 - 前記残差目標値は、前記角振動数に応じた位相目標値を含む請求項1記載の周期性信号の適応制御装置。
- 前記角振動数に基づき前記第1伝達特性の伝達関数の推定値を算出する第1推定伝達関数算出部をさらに備え、
前記適応信号発生部は、式(1)に従って得られる前記適応信号を前記第1伝達経路中に発生させ、
前記第1フィルタ係数更新部は、前記角振動数、前記第1の残差、前記第1伝達関数推定値、及び、前記残差目標値に基づき、式(2)(3)(4)又は式(5)(6)(7)に従って式(1)における前記第1振幅フィルタ係数及び前記第1位相フィルタ係数を更新する請求項1記載の周期性信号の適応制御装置。
- 前記角振動数に基づき前記第1伝達特性の伝達関数の推定値を算出する第1推定伝達関数算出部をさらに備え、
前記適応信号発生部は、式(8)に従って得られる前記適応信号を前記第1伝達経路中に発生させ、
前記第1フィルタ係数更新部は、前記角振動数、前記第1の残差、前記第1伝達関数推定値、及び、前記残差目標値に基づき、式(9)(10)(11)又は式(12)(13)(14)に従って式(8)における前記第1振幅フィルタ係数及び前記第1位相フィルタ係数を更新する請求項2記載の周期性信号の適応制御装置。
- 前記観測点目標値設定部は、前記角振動数に応じた前記振幅目標値を予め記憶し、前記振動発生源から実際に発生される前記周期性信号の前記角振動数に基づき前記振幅目標値を設定する請求項1〜4の何れか一項に記載の周期性信号の適応制御装置。
- 前記観測点目標値設定部は、
前記角振動数に基づき、第2振幅フィルタ係数及び第2位相フィルタ係数を構成成分に含む式(15)に従って得られる仮想適応信号を前記第2伝達経路中に仮想的に発生させる仮想適応信号発生部と、
前記第2伝達経路中の第2観測点において前記周期性信号に基づき生じる第2観測点振動を検出する振動検出部と、
前記仮想適応信号及び前記第2観測点振動に基づき、仮想観測点において前記周期性信号に対して前記仮想適応信号を所定の仮想伝達特性を介して仮想的に加えることにより生じる仮想残差を検出する仮想残差検出部と、
前記角振動数に基づき前記仮想伝達特性の伝達関数の推定値を算出する仮想伝達関数推定部と、
前記角振動数、前記仮想残差及び前記仮想伝達関数推定値に基づき、式(16)(17)又は式(18)(19)に従って式(15)における前記第2振幅フィルタ係数及び前記第2位相フィルタ係数を更新する第2フィルタ係数更新部と、
更新された前記第2振幅フィルタ係数を式(20)に従って前記振幅目標値に設定する更新目標値設定部と、
を備える請求項1〜4の何れか一項に記載の周期性信号の適応制御装置。
- 前記観測点目標値設定部は、前記第2伝達経路の伝達特性に基づき前記位相目標値を設定する請求項2又は4に記載の周期性信号の適応制御装置。
- 前記観測点目標値設定部は、前記角振動数に応じた前記位相目標値を予め記憶し、前記振動発生源から実際に発生される前記周期性信号の前記角振動数に基づき前記位相目標値を設定する請求項7記載の周期性信号の適応制御装置。
- 前記観測点目標値設定部は、
前記角振動数に基づき、第2振幅フィルタ係数及び第2位相フィルタ係数を構成成分に含む式(21)に従って得られる仮想適応信号を前記第2伝達経路中に仮想的に発生させる仮想適応信号発生部と、
前記第2伝達経路中の第2観測点において前記周期性信号に基づき生じる第2観測点振動を検出する振動検出部と、
前記仮想適応信号及び前記第2観測点振動に基づき、仮想観測点において前記周期性信号に対して前記仮想適応信号を所定の仮想伝達特性を介して仮想的に加えることにより生じる仮想残差を検出する仮想残差検出部と、
前記角振動数に基づき前記仮想伝達特性の伝達関数の推定値を算出する仮想伝達関数推定部と、
前記角振動数、前記仮想残差及び前記仮想伝達関数推定値に基づき、式(22)(23)又は式(24)(25)に従って式(21)における前記第2振幅フィルタ係数及び前記第2位相フィルタ係数を更新する第2フィルタ係数更新部と、
更新された前記第2位相フィルタ係数を式(26)に従って前記位相目標値に設定する更新目標値設定部と、
を備える請求項7記載の周期性信号の適応制御装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006054879A JP4792302B2 (ja) | 2006-03-01 | 2006-03-01 | 周期性信号の適応制御装置 |
| US11/680,100 US8139629B2 (en) | 2006-03-01 | 2007-02-28 | Adaptive controller |
| DE102007000119A DE102007000119A1 (de) | 2006-03-01 | 2007-02-28 | Adaptive Steuerungseinrichtung |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006054879A JP4792302B2 (ja) | 2006-03-01 | 2006-03-01 | 周期性信号の適応制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2007233057A JP2007233057A (ja) | 2007-09-13 |
| JP4792302B2 true JP4792302B2 (ja) | 2011-10-12 |
Family
ID=38460400
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006054879A Expired - Fee Related JP4792302B2 (ja) | 2006-03-01 | 2006-03-01 | 周期性信号の適応制御装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US8139629B2 (ja) |
| JP (1) | JP4792302B2 (ja) |
| DE (1) | DE102007000119A1 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2011065441A1 (ja) * | 2009-11-25 | 2011-06-03 | シンフォニアテクノロジー株式会社 | 制振装置及びこれを備えた車両 |
| CN114827813B (zh) * | 2022-04-26 | 2025-07-11 | 歌尔股份有限公司 | 一种降噪方法、耳机设备及存储介质 |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5124626A (en) * | 1990-12-20 | 1992-06-23 | Mts Systems Corporation | Sinusoidal signal amplitude and phase control for an adaptive feedback control system |
| US5245830A (en) * | 1992-06-03 | 1993-09-21 | Lockheed Missiles & Space Company, Inc. | Adaptive error correction control system for optimizing stirling refrigerator operation |
| JPH06138888A (ja) * | 1992-10-26 | 1994-05-20 | Honda Motor Co Ltd | 能動振動制御装置 |
| JP3406628B2 (ja) * | 1992-12-25 | 2003-05-12 | アルパイン株式会社 | 騒音キャンセル方式 |
| DE69423531T2 (de) * | 1993-02-02 | 2000-07-20 | Honda Giken Kogyo K.K., Tokio/Tokyo | Schwingungs/Lärmverminderungsvorrichtung |
| JP3430795B2 (ja) * | 1996-05-27 | 2003-07-28 | 東海ゴム工業株式会社 | 周期性信号の適応制御方法 |
| JP3451891B2 (ja) * | 1997-06-13 | 2003-09-29 | 日産自動車株式会社 | 能動型振動制御装置 |
| JP2002005227A (ja) * | 2000-06-19 | 2002-01-09 | Tokai Rubber Ind Ltd | アクティブマウント制御装置の制御データ設定方法及びデータ記録媒体 |
| JP2003047260A (ja) * | 2001-05-22 | 2003-02-14 | Aisin Seiki Co Ltd | インダクタンス負荷駆動用ブリッジ回路の駆動方法 |
| WO2004009007A1 (en) * | 2002-07-19 | 2004-01-29 | The Penn State Research Foundation | A linear independent method for noninvasive online secondary path modeling |
| JP2005155664A (ja) * | 2003-11-20 | 2005-06-16 | Tokai Rubber Ind Ltd | 能動型防振装置の振動制御方法及び振動制御装置 |
| JP4858935B2 (ja) * | 2004-02-10 | 2012-01-18 | 国立大学法人東京工業大学 | 非線形制御器及び非線形的制御方法 |
| JP4258845B2 (ja) | 2004-04-20 | 2009-04-30 | 株式会社安川電機 | 適応制御装置 |
| JP4213640B2 (ja) * | 2004-07-28 | 2009-01-21 | パナソニック株式会社 | 能動騒音低減装置 |
| US7751963B2 (en) * | 2008-02-14 | 2010-07-06 | Gm Global Technology Operations, Inc. | Self-tuning active engine mount for vehicles with active fuel management engine |
-
2006
- 2006-03-01 JP JP2006054879A patent/JP4792302B2/ja not_active Expired - Fee Related
-
2007
- 2007-02-28 DE DE102007000119A patent/DE102007000119A1/de not_active Withdrawn
- 2007-02-28 US US11/680,100 patent/US8139629B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| DE102007000119A1 (de) | 2007-10-04 |
| US20070206669A1 (en) | 2007-09-06 |
| JP2007233057A (ja) | 2007-09-13 |
| US8139629B2 (en) | 2012-03-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2600341B1 (en) | Active vibration noise control apparatus | |
| JP5713958B2 (ja) | 能動型騒音制御装置 | |
| US7340065B2 (en) | Active noise control system | |
| JP5757346B2 (ja) | 能動振動騒音制御装置 | |
| US10276146B2 (en) | Active noise control device | |
| US20160344433A1 (en) | Auto-selection method for modeling secondary-path estimation filter for active noise control system | |
| JP6073454B2 (ja) | 能動振動騒音制御装置 | |
| CN116438597A (zh) | 用于适应所估计的次级路径的系统和方法 | |
| JP4792302B2 (ja) | 周期性信号の適応制御装置 | |
| JP4945425B2 (ja) | 能動型防振適応制御装置 | |
| JP2005257919A (ja) | 像振れ補正装置 | |
| JP3611181B2 (ja) | 周期性信号の適応制御方法 | |
| JP5846776B2 (ja) | 能動型振動騒音抑制装置 | |
| JP4569514B2 (ja) | 適応ノッチフィルタ | |
| JP5090272B2 (ja) | 能動型振動騒音制御装置 | |
| JPH1049204A (ja) | 周期性信号の適応制御方法 | |
| JP5670301B2 (ja) | 能動型振動騒音制御装置 | |
| JP5674569B2 (ja) | 能動型振動騒音抑制装置 | |
| JP5141351B2 (ja) | 能動型騒音制御装置 | |
| JPH1153004A (ja) | 周期性信号の適応制御方法 | |
| JP3389981B2 (ja) | 周期性信号の適応制御方法 | |
| JP3611168B2 (ja) | 周期性信号の適応制御方法 | |
| JP3611180B2 (ja) | 周期性信号の適応制御方法 | |
| JP3804496B2 (ja) | 適応ステップサイズ制御適応フィルタ、および適応スケール係数制御方法 | |
| JP3568105B2 (ja) | 周期性信号の適応制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080820 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110127 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110322 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110520 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110712 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110725 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140729 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4792302 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |