JP4777116B2 - 画像処理装置及び方法、及び撮像装置 - Google Patents
画像処理装置及び方法、及び撮像装置 Download PDFInfo
- Publication number
- JP4777116B2 JP4777116B2 JP2006095847A JP2006095847A JP4777116B2 JP 4777116 B2 JP4777116 B2 JP 4777116B2 JP 2006095847 A JP2006095847 A JP 2006095847A JP 2006095847 A JP2006095847 A JP 2006095847A JP 4777116 B2 JP4777116 B2 JP 4777116B2
- Authority
- JP
- Japan
- Prior art keywords
- images
- reliability
- vector
- image
- detection
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images







Landscapes
- Image Processing (AREA)
- Editing Of Facsimile Originals (AREA)
- Studio Devices (AREA)
Description
本発明の第1の実施形態について、図1から図5を参照して説明する。
図1は本発明の第1の実施形態における撮像装置の電気的構成を示すブロック図である。図1において、31はレンズおよび絞りからなる光学系、32はメカニカルシャッタ、33はCCDやCMOSセンサ等の固体撮像素子、34はアナログ信号処理を行うCDS回路である。35はアナログ信号をデジタル信号に変換するA/D変換器、36は、撮像素子33、CDS回路34およびA/D変換器35を動作させる信号を発生するタイミング信号発生回路である。37は、光学系31、シャッタ32および撮像素子33の駆動回路、38は撮影した画像データに必要な信号処理を行う信号処理回路、39は信号処理された画像データを記憶する画像メモリである。
以下、上記のように構成された撮像装置を用いてメカニカルシャッタ32を使用した場合の撮影動作について説明する。なお、撮影動作に先立ち、撮像装置の電源投入時等のシステム制御部44の動作開始時において、不揮発性メモリ45から必要なプログラム、制御データおよび補正データを揮発性メモリ46に転送して記憶しておくものとする。これらのプログラムやデータは、システム制御部44が撮像装置を制御する際に使用する。更に、必要に応じて、追加のプログラムやデータを不揮発性メモリ45から揮発性メモリ46に転送したり、システム制御部44が直接不揮発性メモリ45内のデータを読み出して使用したりするものとする。
記録媒体40に画像データが記録されている場合の再生動作について説明する。システム制御部44からの制御信号により、記録回路41は、記録媒体40から画像データを読み出す。また、同じくシステム制御部44からの制御信号により、信号処理回路38は、画像データが圧縮画像であった場合には、画像伸長処理を行い、画像メモリ39に記憶する。画像メモリ39に記憶されている画像データは、信号処理回路38で解像度変換処理を実施された後、表示回路43において表示装置42に適した信号に変換されて表示装置42に表示される。
図2は複数の画像を合成処理する場合の、信号処理装置38の機能構成を示すブロック図である。なお、ここで行われる合成処理は重ね合わせ合成であって、公知のダイナミックレンジ拡大やノイズ低減、手振れ補正等に利用することが可能である。また、この合成処理を常に行う必要はなく、必要に応じてまたは操作者の設定に応じて行えばよい。
v1n=v12+v23+…+v(n-1)n …(1)
v12+v23+…+v(n-1)n−v1n=v12+v23+…+v(n-1)n+vn1=0 …(2)
が成り立つ。しかし、一般的には検出の誤差などがあるために図4(b)のように
v1n≠v12+v23+…+v(n-1)n …(3)
であり、結果として、
v12+v23+…+v(n-1)n−v1n=v12+v23+…+v(n-1)n+vn1≠0 …(4)
となる。一方で1枚目からn−1枚目までの移動ベクトルを考えると、図4(b)の例でも
v12+v23+…+v(n-2)(n-1)−v1(n-1)=v12+v23+…+v(n-2)(n-1)+v(n-1)1=0 …(5)
が成り立つ。ここで1枚目からn枚目までの移動ベクトルの同定の信頼性の評価値として次式(6)を用いる。
図4を用いて説明したように、移動ベクトルの同定において検出間違いや大きな誤差がある場合、信頼性評価値は大きな値をとり、全く誤差が無い場合にはゼロとなる。つまり信頼性評価値でベクトルの同定精度を見積もることが可能である。
さらに、信頼性評価値を用いて画像の合成に用いる移動ベクトルおよび画像を決定する方法について、図4および図5を用いて説明する。
である。
信頼性検出部2は、図5(b)に示す例のように、上述したようにして算出した信頼性評価値が予め設定された所定値よりも大きい(信頼性が低い)場合に、合成すべき4枚の画像のうち、いずれか1つの画像を飛ばしながら再度上記評価値を計算する。なお、許容できる信頼性評価値の値は、実用的には許容錯乱円等を考慮して決定すればよい。図5(b)に示す移動ベクトルの内、1枚目の画像を飛ばした場合を図5(c)に、2枚目の画像を飛ばした場合を図5(d)に、3枚目の画像を飛ばした場合を図5(e)に、そして4枚目の画像を飛ばした場合を図5(f)にそれぞれ示している。
(1枚目を除いた場合の信頼性評価値)=|v23+v34+v42|≠0
(2枚目を除いた場合の信頼性評価値)=|v13+v34+v41|≠0
(3枚目を除いた場合の信頼性評価値)=|v12+v24+v41|=0
となる。一般的に同定は誤差を含むために上記の信頼性評価値は厳密には0にならないが、小さくなるようなベクトルを基に画像を合成することで、画像の位置あわせ精度を向上することができる。
図2に示した位置検出部1は、信頼性検出部2により式(8)に示すような各画像を除いた信頼性評価値を算出するために、必要な移動ベクトルをすべて検出し、信頼性検出部2に出力する。必要な移動ベクトルの数は、任意の2点の組み合わせで決まるので、n枚の画像においてはn(n-1)/2個のベクトルとなる。例えば、上述したように画像が4枚の場合には、v12、v13、v23、v24、v34、v41である。
上記第1の実施形態では、式(8)に示す信頼性評価値に基づいて、複数の画像の内、合成に用いる画像及び移動ベクトルを選択したが、以下に記すように移動ベクトルを置き換えるようにしても良い。式(8)の例では、v34を含む場合に信頼性評価値が大きくなる(信頼性が低くなる)ことから、v34が検出に失敗した移動ベクトルであると評価することができる。
次に、本発明の第2の実施形態について、図1、図2および図6から図8を用いて説明する。
vqi=vpi+uipq=Apqvpi …(9)
=Apq(vp1, vp2, ..., vpm) …(10)
上記式(10)において、(vq1, vq2, ..., vqm)=Mq、(vp1, vp2, ..., vpm)=Mpと標記すると、上記式(10)は
Mq=ApqMp …(11)
Apq=MqMp T(MpMp T)-1 …(12)
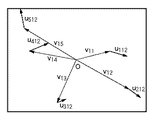
として求めることができる。式(12)における(MpMp T)-1がランク落ちをしないように適切に処理をすることで、Apqを求めることができる。Apqは残差2乗和が最小になるように求められるので、図7においてu512のように不適切に同定されたブロックがあるとアフィンマトリックスの同定精度を下げてしまう。そこで各ブロックにおいてn枚の画像間で求められた移動ベクトルに対して上記第1の実施形態を適用してアフィンマトリックスの同定精度を向上させる。具体的にはi番目のブロックにおいて求められた移動ベクトル
ui12,ui23,…,ui(n-1)n
に対して、上記第1の実施形態の方法を適用する。第1の実施形態の方法によってブロック信頼性検出部7がアフィンマトリックスの同定に適したブロックを選択する。例えば図7において5番目のブロックは不適切に同定が行われているが、図7に示したように背景部分などは同定が不適切になりやすい。このようなブロックは画像間で移動ベクトルがランダムに求まるので、第1の実施形態に示した評価値が小さくならないため容易に除外することができる。このようなブロックの移動ベクトルを除去した後にアフィンマトリックスを同定することで、図7(d)のような正確に重ね合わされた像を得ることができる。
図2に示すように、位置検出部1で求められたアフィンマトリックスは信頼性検出部2に渡される。本第2の実施形態では信頼性検出部2はアフィンマトリックスの行列式を用いて評価を行う。つまり、第1の実施形態での移動ベクトルの場合と同様に誤差無くアフィンマトリックスが同定された場合は
A1n=A12A23…A(n-1)n …(13)
E=A12A23…A(n-1)nAn1 …(14)
となる。ただし、式(14)の左辺のEは単位行列を表す。つまり、1枚目からn枚目までの写像を順次重ねたものにさらにn枚目から1枚目までの写像を行うと、元に戻る単位行列になるのである。上式の両辺の行列式を考えると
となるので、式(15)により得られる値を、信頼性評価値として定義する。そして、
(k枚目を除いた信頼性評価値)=det(A12A23…A(k-2)(k-1)A(k-1)(k+1)…A(n-1)nAn1) …(16)
を順次計算していき、第1の実施形態の信頼性評価値と同様にこの値を小さくすることで適切なアフィン写像を選別することができる。
図2に示す信頼性検出部2において、本第2の実施形態においては式(16)により信頼性評価値を求め、信頼性の高いアフィン写像を求める。次に図2に示した画像選択部3において、信頼性検出部2からの値に基づいて合成すべき画像と合成に用いるアフィン写像を決定する。
上記第1及び第2の実施形態では、本発明の信号処理回路を撮像装置に搭載した場合について説明したが、本発明はこれに限るものではない。例えば、撮像装置から入力される画像をコンピュータなどの外部信号処理装置において処理する場合に適用することができる。
2 信頼性検出部
3 画像選択部
4 画像合成部
5 分割部or特徴点抽出部
6 移動ベクトル検出部
7 ブロック信頼性検出部
8 アフィン写像生成部
10a〜10m 画像
11 出力画像
20 移動ベクトル
21 被写体
31 光学系
32 メカニカルシャッタ
33 撮像素子
34 CDS回路
35 A/D変換器
36 タイミング信号発生回路
37 駆動回路
38 信号処理回路
39 画像メモリ
40 記録媒体
41 記録回路
42 表示装置
43 表示回路
44 システム制御部
45 不揮発性メモリ(ROM)
46 揮発性メモリ(RAM)
Claims (18)
- 互いに関連する複数の画像を合成することで合成画像を得る画像処理装置であって、
各画像間の相対的な変位を移動ベクトルとして求める位置検出手段と、
前記移動ベクトルの検出の信頼性を、前記複数の画像間の移動ベクトルの合成ベクトルを用いて求める信頼性検出手段と、
前記信頼性検出手段により求められた信頼性に基づいて、前記互いに関連する複数の画像から、合成に用いる複数の画像を選択する選択手段と、
前記選択手段により選択された複数の画像を、前記位置検出手段により求めた前記移動ベクトルに基づいて、被写体が合致するように位置合わせして合成する合成手段とを有し、
前記信頼性検出手段は、前記複数の画像間の移動ベクトルを順次加算し、該順次加算された移動ベクトルに前記複数の画像のうち最後の画像から最初の画像への移動ベクトルを加えた合成ベクトルから前記移動ベクトルの検出の信頼性を求めることを特徴とする画像処理装置。 - 互いに関連する複数の画像のうち、少なくとも3枚の画像を合成することで合成画像を得る画像処理装置であって、
各画像間の相対的な変位を移動ベクトルとして求める位置検出手段と、
前記移動ベクトルの検出の信頼性を、前記複数の画像間の移動ベクトルの合成ベクトルを用いて求める信頼性検出手段と、
前記信頼性検出手段により求められた信頼性に基づいて、前記位置検出手段が検出を失敗した前記移動ベクトルを求めた2枚の画像を選択し、該選択した2枚の画像間の移動ベクトルを、該選択した2枚の画像のうち一方の画像から、前記複数枚の画像のうち当該2枚の画像以外の任意の画像への移動ベクトルと、該任意の画像から前記2枚の画像の他方の画像への移動ベクトルとの和に置き換える置換手段と、
前記位置検出手段により求めた移動ベクトル及び前記置換手段により置き換えられた移動ベクトルに基づいて、被写体が合致するように前記複数の画像を位置合わせして合成する合成手段とを有し、
前記信頼性検出手段は、前記複数の画像間の移動ベクトルを順次加算し、該順次加算された移動ベクトルに前記複数の画像のうち最後の画像から最初の画像への移動ベクトルを加えた合成ベクトルから、前記移動ベクトルの検出の信頼性を求めることを特徴とする画像処理装置。 - 前記合成ベクトルの大きさが小さいほど、前記信頼性が高く、
当該信頼性が予め設定された信頼性の基準よりも低い場合に、前記複数枚の画像のうち前記複数の画像よりも少ない枚数の画像で前記信頼性を求めることを特徴とする請求項1または2に記載の画像処理装置。 - 前記信頼性検出手段は、n枚の画像を合成する場合において、p枚目からq枚目への移動ベクトルをvpqと表現した場合に、
|v12+…+v(n-1)n+vn1|
を前記信頼性として求め、当該信頼性が予め設定された信頼性よりも低い場合に、更に、前記複数の画像の内の1枚を順に除きながら前記信頼性を求めることを特徴とする請求項3に記載の画像処理装置。 - 前記予め設定された信頼性が、許容錯乱円の関数であることを特徴とする請求項4に記載の画像処理装置。
- 互いに関連する複数の画像を合成することで合成画像を得る画像処理装置であって、
前記複数の画像をそれぞれ複数ブロックに分割する分割手段と、
前記分割手段により分割された各ブロックについて、画像間の相対的な変位を移動ベクトルとして求める第1の位置検出手段と、
前記移動ベクトルの検出の信頼性を、前記複数の画像間の移動ベクトルの合成ベクトルを用いてブロック毎に求める第1の信頼性検出手段と、
前記複数ブロックの内、前記第1の信頼性検出手段により求められた信頼性が予め設定された信頼性よりも低いブロック以外のブロックの、前記第1の位置検出手段により求められた画像間の相対的な変位に基づいて、全体画像間の移動量または写像マトリックスを求める第2の位置検出手段と、
前記第2の位置検出手段により求められた移動量または写像マトリックスに基づいて、当該移動量または写像マトリックスの検出の信頼性を求める第2の信頼性検出手段と、
前記第2の信頼性検出手段により求められた信頼性に基づいて、前記互いに関連する複数の画像から、合成に用いる複数の画像を選択する選択手段と、
前記選択手段により選択された複数の画像を、前記第2の位置検出手段により求めた移動量または写像マトリックスに基づいて、被写体が合致するように位置合わせして合成する合成手段とを有し、
前記第1の信頼性検出手段は、前記複数の画像間の移動ベクトルを順次加算し、該順次加算された移動ベクトルに前記複数の画像のうち最後の画像から最初の画像への移動ベクトルを加えた合成ベクトルから、前記移動ベクトルの検出の信頼性を求め、
前記第2の信頼性検出手段は、前記複数の画像間の写像を順次重ね、該順次重ねられた写像に前記複数の画像のうち最後の画像から最初の画像への写像を重ねることで、前記移動量または写像マトリクスの検出の信頼性を求めることを特徴とする画像処理装置。 - 前記合成ベクトルの大きさが小さいほど、前記移動ベクトルの検出の信頼性が高く、
当該信頼性が予め設定された信頼性の基準よりも低い場合に、前記複数枚の画像のうち前記複数の画像よりも少ない枚数の画像で前記移動ベクトルの検出の信頼性を求めることを特徴とする請求項6に記載の画像処理装置。 - 前記第1の信頼性検出手段は、n枚の画像を合成する場合において、p枚目からq枚目への移動ベクトルをvpqと表現した場合に、
|v12+…+v(n-1)n+vn1|
を前記移動ベクトルの検出の信頼性として求め、当該信頼性が前記予め設定された信頼性よりも低い場合に、更に、前記複数の画像の内の1枚を順に除きながら前記移動ベクトルの検出の信頼性を求めることを特徴とする請求項7に記載の画像処理装置。 - 前記予め設定された信頼性が、許容錯乱円の関数であることを特徴とする請求項8に記載の画像処理装置。
- 前記第2の信頼性検出手段は、n枚の画像を合成する場合において、p枚目からq枚目へのアフィン写像を表すマトリックスをApqと表現するとき、
det(A12+…+A(n-1)n+An1)
を前記移動量または写像マトリクスの検出の信頼性として求め、当該信頼性が前記予め設定された信頼性よりも低い場合に、更に、前記複数の画像の内の1枚を順に除きながら前記移動量または写像マトリクスの検出の信頼性を求めることを特徴とする請求項6乃至9のいずれか1項に記載の画像処理装置。 - 前記予め設定された信頼性が、許容錯乱円の関数であることを特徴とする請求項10に記載の画像処理装置。
- 請求項1から11のいずれか1項に記載の画像処理装置を備えた撮像装置。
- 互いに関連する複数の画像を合成することで合成画像を得る画像処理方法であって、
各画像間の相対的な変位を移動ベクトルとして求める位置検出工程と、
前記移動ベクトルの検出の信頼性を、前記複数の画像間の移動ベクトルの合成ベクトルを用いて求める信頼性検出工程と、
前記信頼性検出工程で求められた信頼性に基づいて、前記互いに関連する複数の画像から、合成に用いる複数の画像を選択する選択工程と、
前記選択工程で選択された複数の画像を、前記位置検出工程により求めた前記移動ベクトルに基づいて、被写体が合致するように位置合わせして合成する合成工程とを有し、
前記信頼性検出工程では、前記複数の画像間の移動ベクトルを順次加算し、該順次加算された移動ベクトルに前記複数の画像のうち最後の画像から最初の画像への移動ベクトルを加えた合成ベクトルから前記移動ベクトルの検出の信頼性を求めることを特徴とする画像処理方法。 - 互いに関連する複数の画像のうち、少なくとも3枚の画像を合成することで合成画像を得る画像処理方法であって、
各画像間の相対的な変位を移動ベクトルとして求める位置検出工程と、
前記移動ベクトルの検出の信頼性を、前記複数の画像間の移動ベクトルの合成ベクトルを用いて求める信頼性検出工程と、
前記信頼性検出工程で求められた信頼性に基づいて、前記位置検出工程で検出を失敗した前記移動ベクトルを求めた2枚の画像を選択し、該選択した2枚の画像間の移動ベクトルを、該選択した2枚の画像のうち一方の画像から、前記複数枚の画像のうち当該2枚の画像以外の任意の画像への移動ベクトルと、該任意の画像から前記2枚の画像の他方の画像への移動ベクトルとの和に置き換える置換工程と、
前記位置検出工程により求めた移動ベクトル及び前記置換工程により置き換えられた移動ベクトルに基づいて、被写体が合致するように前記複数の画像を位置合わせして合成する合成工程とを有し、
前記信頼性検出工程では、前記複数の画像間の移動ベクトルを順次加算し、該順次加算された移動ベクトルに前記複数の画像のうち最後の画像から最初の画像への移動ベクトルを加えた合成ベクトルから前記移動ベクトルの検出の信頼性を求めることを特徴とする画像処理方法。 - 互いに関連する複数の画像を合成することで合成画像を得る画像処理方法であって、
前記複数の画像をそれぞれ複数ブロックに分割する分割工程と、
前記分割工程で分割された各ブロックについて、画像間の相対的な変位を移動ベクトルとして求める第1の位置検出工程と、
前記移動ベクトルの検出の信頼性を、前記複数の画像間の移動ベクトルの合成ベクトルを用いてブロック毎に求める第1の信頼性検出工程と、
前記複数ブロックの内、前記第1の信頼性検出工程で求められた信頼性が予め設定された信頼性よりも低いブロック以外のブロックの、前記第1の位置検出工程で求められた画像間の相対的な変位に基づいて、全体画像間の移動量または写像マトリックスを求める第2の位置検出工程と、
前記第2の位置検出工程で求められた移動量または写像マトリックスに基づいて、当該移動量または写像マトリックスの検出の信頼性を求める第2の信頼性検出工程と、
前記第2の信頼性検出工程で求められた信頼性に基づいて、前記互いに関連する複数の画像から、合成に用いる複数の画像を選択する選択工程と、
前記選択工程で選択された複数の画像を、前記第2の位置検出工程で求めた移動量または写像マトリックスに基づいて、被写体が合致するように位置合わせして合成する合成工程とを有し、
前記第1の信頼性検出工程では、前記複数の画像間の移動ベクトルを順次加算し、該順次加算された移動ベクトルに前記複数の画像のうち最後の画像から最初の画像への移動ベクトルを加えた合成ベクトルから、前記移動ベクトルの検出の信頼性を求め、
前記第2の信頼性検出工程では、前記複数の画像間の写像を順次重ね、該順次重ねられた写像に前記複数の画像のうち最後の画像から最初の画像への写像を重ねることで、前記移動量または写像マトリックスの検出の信頼性を求めることを特徴とする画像処理方法。 - 情報処理装置が実行可能なプログラムであって、前記プログラムを実行した情報処理装置を、請求項1乃至11のいずれか1項に記載の画像処理装置として機能させることを特徴とするプログラム。
- コンピュータに、請求項13乃至15のいずれか1項に記載の画像処理方法の各工程を実行させるためのプログラム。
- 請求項16または17に記載のプログラムを格納したことを特徴とする情報処理装置が読み取り可能な記憶媒体。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006095847A JP4777116B2 (ja) | 2006-03-30 | 2006-03-30 | 画像処理装置及び方法、及び撮像装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006095847A JP4777116B2 (ja) | 2006-03-30 | 2006-03-30 | 画像処理装置及び方法、及び撮像装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2007272459A JP2007272459A (ja) | 2007-10-18 |
| JP2007272459A5 JP2007272459A5 (ja) | 2009-05-07 |
| JP4777116B2 true JP4777116B2 (ja) | 2011-09-21 |
Family
ID=38675216
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006095847A Expired - Fee Related JP4777116B2 (ja) | 2006-03-30 | 2006-03-30 | 画像処理装置及び方法、及び撮像装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4777116B2 (ja) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8963949B2 (en) * | 2009-04-22 | 2015-02-24 | Qualcomm Incorporated | Image selection and combination method and device |
| JP5230013B2 (ja) * | 2009-07-13 | 2013-07-10 | シャープ株式会社 | 撮像装置 |
| JP5569357B2 (ja) | 2010-11-19 | 2014-08-13 | 富士通株式会社 | 画像処理装置、画像処理方法及び画像処理プログラム |
| JP5744614B2 (ja) | 2011-04-28 | 2015-07-08 | オリンパス株式会社 | 画像処理装置、画像処理方法、および、画像処理プログラム |
| JP2014039169A (ja) * | 2012-08-16 | 2014-02-27 | Sony Corp | 画像処理装置、および画像処理方法、並びにプログラム |
| JP2016076838A (ja) * | 2014-10-07 | 2016-05-12 | キヤノン株式会社 | 画像処理装置及び画像処理装置の制御方法 |
| JP7102150B2 (ja) * | 2018-01-10 | 2022-07-19 | キヤノン株式会社 | 画像処理装置、画像処理方法、およびプログラム |
| WO2023188044A1 (ja) * | 2022-03-29 | 2023-10-05 | キヤノン株式会社 | 撮像装置およびその制御方法、および画像処理装置および方法 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4284570B2 (ja) * | 1999-05-31 | 2009-06-24 | ソニー株式会社 | 撮像装置及びその方法 |
| US7443443B2 (en) * | 2005-07-28 | 2008-10-28 | Mitsubishi Electric Research Laboratories, Inc. | Method and apparatus for enhancing flash and ambient images |
| JP4597087B2 (ja) * | 2006-03-30 | 2010-12-15 | キヤノン株式会社 | 画像処理装置及び方法、及び撮像装置 |
-
2006
- 2006-03-30 JP JP2006095847A patent/JP4777116B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2007272459A (ja) | 2007-10-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4777116B2 (ja) | 画像処理装置及び方法、及び撮像装置 | |
| JP5574423B2 (ja) | 撮像装置、表示制御方法及びプログラム | |
| JP4671430B2 (ja) | 撮像装置、撮像装置の制御方法、プログラム及び記録媒体 | |
| JP4549260B2 (ja) | 記録再生装置、記録再生方法、及びコンピュータプログラム | |
| JP4656216B2 (ja) | 撮像装置、画像処理装置、画像処理方法、プログラム及び記録媒体 | |
| JP4501994B2 (ja) | 撮像装置 | |
| JP4597087B2 (ja) | 画像処理装置及び方法、及び撮像装置 | |
| KR101109532B1 (ko) | 촬상 장치, 촬상 방법 및 촬상 프로그램이 기록된 기록 매체 | |
| JP4821626B2 (ja) | 画像処理装置、電子カメラ、および画像処理プログラム | |
| JP2013165487A (ja) | 画像処理装置、撮像装置、およびプログラム | |
| JP2007336394A (ja) | 撮像装置及び画像合成方法 | |
| US20130002952A1 (en) | Image synthesizing apparatus that synthesizes multiple images to obtain moving image, control method therefor, and storage medium | |
| JP5402242B2 (ja) | 画像再生装置、撮像装置、画像再生方法、画像再生プログラム | |
| US11722788B2 (en) | Image processing apparatus and method, and image capturing apparatus | |
| JP4665826B2 (ja) | 撮像装置および画像処理プログラム | |
| JP4499686B2 (ja) | 画像処理装置および方法、記録媒体、並びにプログラム | |
| JP2013258468A (ja) | 撮像装置とその制御方法およびプログラム | |
| JP5831492B2 (ja) | 撮像装置、表示制御方法及びプログラム | |
| JP5962974B2 (ja) | 撮像装置、撮像方法、及びプログラム | |
| JP5195973B2 (ja) | 画像処理装置、電子カメラ、および画像処理プログラム | |
| JP5099210B2 (ja) | 撮像装置、撮像方法、画像処理装置、画像処理方法、プログラム及び記録媒体 | |
| JP5321108B2 (ja) | カメラ、レンズ収差補正プログラム、およびレンズ収差補正プログラムを記録したコンピュータ読み取り可能な記録媒体 | |
| JP2006311544A (ja) | 画像処理装置および方法、記録媒体、並びにプログラム | |
| JP5041050B2 (ja) | 撮像装置および画像処理プログラム | |
| JP2008160274A (ja) | 移動ベクトル検出方法及びその装置並びにそのプログラム、電子的手振れ補正方法及びその装置並びにそのプログラム、撮像装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090323 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090323 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110412 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110415 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110609 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110627 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110629 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140708 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |