JP4668307B2 - 変速機 - Google Patents
変速機 Download PDFInfo
- Publication number
- JP4668307B2 JP4668307B2 JP2008221116A JP2008221116A JP4668307B2 JP 4668307 B2 JP4668307 B2 JP 4668307B2 JP 2008221116 A JP2008221116 A JP 2008221116A JP 2008221116 A JP2008221116 A JP 2008221116A JP 4668307 B2 JP4668307 B2 JP 4668307B2
- Authority
- JP
- Japan
- Prior art keywords
- disk
- input
- output
- transmission
- pair
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images














Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H15/00—Gearings for conveying rotary motion with variable gear ratio, or for reversing rotary motion, by friction between rotary members
- F16H15/02—Gearings for conveying rotary motion with variable gear ratio, or for reversing rotary motion, by friction between rotary members without members having orbital motion
- F16H15/46—Gearings providing a discontinuous or stepped range of gear ratios
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H15/00—Gearings for conveying rotary motion with variable gear ratio, or for reversing rotary motion, by friction between rotary members
- F16H15/02—Gearings for conveying rotary motion with variable gear ratio, or for reversing rotary motion, by friction between rotary members without members having orbital motion
- F16H15/04—Gearings providing a continuous range of gear ratios
- F16H15/06—Gearings providing a continuous range of gear ratios in which a member A of uniform effective diameter mounted on a shaft may co-operate with different parts of a member B
- F16H15/16—Gearings providing a continuous range of gear ratios in which a member A of uniform effective diameter mounted on a shaft may co-operate with different parts of a member B in which the member B has a conical friction surface
- F16H15/18—Gearings providing a continuous range of gear ratios in which a member A of uniform effective diameter mounted on a shaft may co-operate with different parts of a member B in which the member B has a conical friction surface externally
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H15/00—Gearings for conveying rotary motion with variable gear ratio, or for reversing rotary motion, by friction between rotary members
- F16H15/02—Gearings for conveying rotary motion with variable gear ratio, or for reversing rotary motion, by friction between rotary members without members having orbital motion
- F16H15/04—Gearings providing a continuous range of gear ratios
- F16H15/06—Gearings providing a continuous range of gear ratios in which a member A of uniform effective diameter mounted on a shaft may co-operate with different parts of a member B
- F16H15/08—Gearings providing a continuous range of gear ratios in which a member A of uniform effective diameter mounted on a shaft may co-operate with different parts of a member B in which the member B is a disc with a flat or approximately flat friction surface
- F16H15/14—Gearings providing a continuous range of gear ratios in which a member A of uniform effective diameter mounted on a shaft may co-operate with different parts of a member B in which the member B is a disc with a flat or approximately flat friction surface in which the axes of the members are parallel or approximately parallel
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H15/00—Gearings for conveying rotary motion with variable gear ratio, or for reversing rotary motion, by friction between rotary members
- F16H15/02—Gearings for conveying rotary motion with variable gear ratio, or for reversing rotary motion, by friction between rotary members without members having orbital motion
- F16H15/04—Gearings providing a continuous range of gear ratios
- F16H15/06—Gearings providing a continuous range of gear ratios in which a member A of uniform effective diameter mounted on a shaft may co-operate with different parts of a member B
- F16H15/16—Gearings providing a continuous range of gear ratios in which a member A of uniform effective diameter mounted on a shaft may co-operate with different parts of a member B in which the member B has a conical friction surface
- F16H15/18—Gearings providing a continuous range of gear ratios in which a member A of uniform effective diameter mounted on a shaft may co-operate with different parts of a member B in which the member B has a conical friction surface externally
- F16H15/22—Gearings providing a continuous range of gear ratios in which a member A of uniform effective diameter mounted on a shaft may co-operate with different parts of a member B in which the member B has a conical friction surface externally the axes of the members being parallel or approximately parallel
Description
原動機に接続され、変速機ケース部材に支持される入力軸と、
前記入力軸に平行配置され、変速機ケース部材に支持される出力軸と、
前記入力軸に設けられ、複数枚の入力ディスクを軸方向に配列することにより構成されるプライマリディスク群を有し、外周端を前記出力軸に近接配置した円板状の入力ディスクと、
前記出力軸に設けられ、複数枚の出力ディスクを軸方向に配列することにより構成されるセカンダリディスク群を有し、外周端を前記入力軸に近接配置した円板状の出力ディスクと、
前記プライマリディスク群と前記セカンダリディスク群が互いに重なり合うディスク重合領域を形成し、前記ディスク重合領域のうち、前記入力軸の軸心と前記出力軸の軸心を結ぶ軸心連結線上に沿って移動可能に設けられ、要求変速比に応じた位置にて前記ディスク重合領域の両側位置から挟持押圧し、両ディスクの弾性変形によりトルク伝達接触部を形成し、両ディスクを挟持押圧する押圧力を解除すると両ディスクの弾性復元力によりトルク伝達を遮断する一対の押圧手段と、を備え、
前記一対の押圧手段は、両ディスクの挟持押圧力として一定の付勢力と調整可能な付勢力の付勢力差による付勢力を付与する付勢手段と、変速条件に応じた最適な挟持押圧力を得るように、前記付勢手段による付勢力を調整する付勢力調整手段と、を有することを特徴とする。
そして、押圧手段により両ディスクを挟持押圧する押圧力を解除すると、両ディスクの弾性復元力により、入力軸から出力軸へのトルク伝達が遮断される。
さらに、一対の押圧手段には、両ディスクの挟持押圧力として一定の付勢力と調整可能な付勢力の付勢力差による付勢力を付与する付勢手段が設けられ、付勢力調整手段において、変速条件に応じた最適な挟持押圧力を得るように付勢手段による付勢力が調整される。このため、増速比側で押圧力が不足したり、減速比側で押圧力が過剰気味になったりすることが防止される。
この結果、従来のバイエル変速機に比べて構造が簡単で部品点数も少なく、低コスト化・軽量化・コンパクト化を達成しながら、増速比を含む高い変速比の設定自由度を持つ変速機能と、トルク伝達/遮断を切り替えるクラッチ機能を併せて発揮することができると共に、変速比に応じた最適な挟持押圧力の付与により耐久性の向上を図ることができる。加えて、プライマリディスク群を有する入力ディスクの枚数設定とセカンダリディスク群を有する出力ディスクの枚数設定により、要求される伝達トルク容量に対応することができると共に、ディスク枚数を増すことで挟持押圧力の低減を図ることができる。
図1は、実施例1のマルチディスク多段変速ユニットT/U(変速機の一例)が適用された車両用自動変速システムを示す全体概略図である。
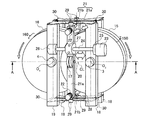
すなわち、移動枠21は、図2に示すように、プライマリディスク群150とセカンダリディスク群160が互いに重なり合うディスク群重合領域の外周部を囲み、軸心連結線CLと一致する方向に移動可能に配置している。そして、移動枠21のうち、ディスク面に対向する一対のローラー保持枠部21a,21aに、軸心連結線CLと平行な一対のローラー回転軸20,20を支持している。また、移動枠20のうち、一対のローラー保持枠部21a,21aを両端部位置にて連結する一対の連結枠部21b,21bに、一対のローラー保持枠部21a,21aの間隔を狭める方向に付勢力を付与する皿バネ22を設けている。
すなわち、入力軸3を支持する入力軸支持枠18に第1スクリューネジ支持構造25を設け、出力軸4を支持する出力軸支持枠19に第2スクリューネジ支持構造26を設け、ローラー保持枠部21aにボールスクリュー構造27を設けている。そして、第1スクリューネジ支持構造25と第2スクリューネジ支持構造26とボールスクリュー構造27に跨ってスクリューネジ24を支持すると共に、スクリューネジ24の端部にステッピングモータ23を設けている。
すなわち、前記テンプレート28,28は、コイルスプリング30,30による付勢力Fsが、互いに引き離す方向に作用する設定により、移動枠21の両端位置にそれぞれ一対配置される。前記カムフォロア29,29は、一対のローラー保持枠部21a,21aの端部位置に設けられ、皿バネ22による付勢力Fdが、一対のテンプレート28,28のカム面28a,28aとの接触面に作用する設定としている。そして、一対の押圧ローラー17,17に加わる付勢力F(皿バネ22による付勢力Fdとコイルスプリング30による付勢力Fsの付勢力差(Fd−Fs))を、一対のテンプレート28,28のカム面28a,28aの面形状の設定により調整している。
すなわち、入力軸3の外周部位置に有する端部間隔保持構造は、図4に示すように、入力軸3と隣接する入力ディスク15,15とで形成されるディスク基部空間に、それぞれカラー31を配置することで、複数枚の入力ディスク15,15を等間隔に配列している。そして、入力軸3に螺合する締め付けナット32と、入力軸3に形成されたストッパ突起3aを用い、締め付けナット32を一端側から締め付けることで、複数枚の入力ディスク15,15を、等間隔に保ちながら入力軸3に挟持固定している。
また、前記カラー31の外周位置には、保持器により保持された一対のボール33,33が配置され、この一対のボール33,33により、複数枚の出力ディスク16,16の外周端部を等間隔に保つようにしている。なお、出力軸4の外周部位置に有する端部間隔保持構造についても同様である(図3を参照)。
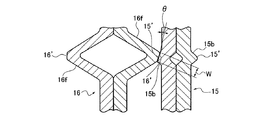
すなわち、上記端部間隔保持構造と相俟って、前記一対の押圧ローラー17,17によるディスクへの挟持押圧力を解除したとき、対向する入出力側突条15a,16g、入出力側突条15b,16f、入出力側突条15c,16e、入出力側突条15d,16d、入出力側突条15e,16c、入出力側突条15f,16b、入出力側突条15g,16aの隙間を確保している。
実施例1のマルチディスク多段変速ユニットT/Uにおける作用を、「ディスクの弾性変形を利用した変速原理」、「弾性変形ディスクにより駆動力を伝達する変速機の有利性」、「Rレンジ選択時のクラッチ作用」、「Pレンジ選択時のパーキング作用」、「N→D切り替え時の発進作用」、「Dレンジ選択時の自動変速作用」、「変速レスポンスの向上作用」に分けて説明する。
図8は、実施例1のマルチディスク多段変速ユニットT/Uにおけるディスクの弾性変形を利用した変速原理を示す原理説明平面図である。図9は、実施例1のマルチディスク多段変速ユニットT/Uにおけるディスクの弾性変形を利用した変速原理を示す原理説明正面図である。
上記のように、本発明の変速機は、弾性変形ディスクにより駆動力を伝達するトラクションドライブ方式の変速機ということができる。そして、この変速機は、広い範囲で変速比の設定自由度を持つ変速機能を発揮する、クラッチ機能を発揮する、低コスト化・軽量化・コンパクト化を狙うことができる、効率の良いトルク伝達接触部の冷却や潤滑を狙うことができる、という有利性を備えている。以下、各有利性について説明する。
本発明の変速機は、増速比を含む高い変速比の設定自由度を持つ変速機能を発揮する。
例えば、変速比の設定範囲(レシオカバー)が8〜11となり、多段変速機として用いた場合には、高速燃費向上を狙える多段化要求に応えることができるし、無段変速機として用いた場合も変速比幅の拡大を図ることができる。特に、終減速機等により等速比位置を増速比側にシフトとした場合には、減速比側の変速比設定自由度がさらに増す。また、ディスク枚数を自由に設定できることで、汎用化が狙えるし、ディスク枚数の追加で伝達トルクアップを狙うこともできる。
本発明の変速機は、押圧手段により両ディスクを挟持押圧する押圧力を解除すると、入力ディスクと出力ディスクは弾性復元力により平板状のプレートディスクに戻り、部分的な弾性変形により形成されたトルク伝達接触部が無くなる。このため、入力軸から出力軸へのトルク伝達が遮断され、入力軸から出力軸へのトルク伝達と、入力軸から出力軸へのトルク遮断を切り替えるクラッチ機能を発揮する。
例えば、車両用無段変速機(ベルトCVTやトロイダルCVT等)の場合、常にトルク伝達接触部を有し、変速機能のみを持つため、ニュートラル状態を確保するべくクラッチ機構やトルクコンバータ等のクラッチ機能部品を併用する必要がある。これに対し、本発明の変速機では、クラッチ機能部品を省略することが可能である。
本発明の変速機は、ディスクを挟持押圧する押圧力がトルク伝達接触部にて互いに相殺され、入力軸と出力軸には荷重が作用しないため、高い剛性を持つ構造とする必要が無く、小さな径の入出力軸とすることができるし(変速比幅の拡大にも有効)、ディスクを薄い鋼板によりプレス成形等にて製造することができる。
入出力軸と円板状の入出力ディスクと押圧手段を構成要素とするため、従来のバイエル変速機に比べ、構造が簡単で、部品点数も少ない。
入力軸と出力軸の間の領域にて押圧手段を移動させるだけの僅かな可動スペースが必要なだけであり、従来のバイエル変速機に比べ、可動スペースが大幅に減少する。
入力ディスクと出力ディスクを互いに重合させているため、ユニット長としてディス径の1.5倍強の長さを確保すれば良く、狭いスペース内に変速機が収まる。
これらの相乗作用により、車両に既に搭載されている周知の変速機と比べた場合、コスト面と重量面と必要スペース面の全てにおいて、低コスト化・軽量化・コンパクト化を達成することができる。
本発明の変速機は、固定された入力軸と出力軸の2軸構造であり、かつ、トルク伝達接触部が1箇所に集中するため、その部分を狙って油を吹き付けるだけで、冷却効果の高い潤滑を行うことができるし、遠心潤滑や掻き上げ潤滑等を活用することで、オイルポンプを不要とすることも可能である。
図10は、実施例1のマルチディスク多段変速ユニットT/Uが適用された車両用自動変速システムにおけるRレンジ選択時のテンプレートとカムフォロワの位置関係を示す平面図である。
図11は、実施例1のマルチディスク多段変速ユニットT/Uが適用された車両用自動変速システムにおけるPレンジ選択時のテンプレートとカムフォロワの位置関係を示す平面図である。図12は、実施例1のマルチディスク多段変速ユニットT/Uが適用された車両用自動変速システムにおけるPレンジ選択時にディスクに形成されるトルク伝達接触部を示す正面図である。
図13は、実施例1のマルチディスク多段変速ユニットT/Uが適用された車両用自動変速システムにおけるNレンジ選択からDレンジ選択へ切り替え時のテンプレートとカムフォロワの位置関係を示す平面図で、(a)はニュートラル選択時をあらわし、(b)はニュートラルから1速段への選択時をあらわし、(c)は1速段フル負荷選択時をあらわし、(d)は1速段軽負荷選択時をあらわし、(e)は1速段から2速段への選択時をあらわし、(f)は2速段選択時をあらわす。
図14は、実施例1のマルチディスク多段変速ユニットT/Uが適用された車両用自動変速システムにおけるDレンジ選択時のトルク伝達接触部を示す拡大断面図である。図15は、実施例1のマルチディスク多段変速ユニットT/Uが適用された車両用自動変速システムにおけるDレンジ選択時に各変速段にてトルク伝達接触部に作用する付勢力(=挟持押圧力)の関係を示す付勢力特性図である。
したがって、1速段での伝達トルクが最も大きく、7速段での伝達トルクが最も小さくなるのに対応し、1速段から7速段までの各変速段にて、滑ることなく適正な接触面積を得る挟持押圧力を付与することができる。
したがって、1速段から2速段等へのアップシフト中や2速段から1速段等へのダウンシフト中、一対の押圧ローラー17,17を移動させるために必要なトルクが軽減され、変速動作のためのステッピングモータ23への負荷軽減により、小型のステッピングモータ23を用いながらも円滑な自動変速を行うことができる。
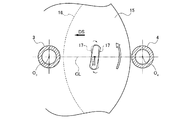
図16は、実施例1のマルチディスク多段変速ユニットT/Uが適用された車両用自動変速システムにおけるDレンジ走行時のダウンシフト中に生じる微小ステア作用を示す作用説明図である。図17は、実施例1のマルチディスク多段変速ユニットT/Uが適用された車両用自動変速システムにおけるDレンジ走行時のアップシフト中に生じる微小ステア作用を示す作用説明図である。
実施例1のマルチディスク多段変速ユニットT/Uにあっては、下記に列挙する効果を得ることができる。
1 エンジン(原動機)
3 入力軸
4 出力軸
15 入力ディスク
150 プライマリディスク群
15a,15b,15c,15d,15e,15f,15g 入力側突条
16 出力ディスク
160 セカンダリディスク群
16a,16b,16c,16d,16e,16f,16g 出力側突条
17,17 押圧ローラー(押圧手段)
18,18 入力軸支持枠(変速機ケース部材)
19,19 出力軸支持枠(変速機ケース部材)
21 移動枠
22 皿バネ(付勢手段)
23 ステッピングモータ(モータアクチュエータ)
24 スクリューネジ
28,28 テンプレート(付勢力調整手段)
28a,28a カム面(付勢力調整手段)
29,29 カムフォロワ(付勢力調整手段)
30,30 コイルスプリング
Fd 皿バネ22による付勢力
Fs コイルスプリング30による付勢力
O3 入力軸3の軸心
O4 出力軸4の軸心
CL 軸心連結線
TC トルク伝達接触部
Claims (6)
- 原動機に接続され、変速機ケース部材に支持される入力軸と、
前記入力軸に平行配置され、変速機ケース部材に支持される出力軸と、
前記入力軸に設けられ、複数枚の入力ディスクを軸方向に配列することにより構成されるプライマリディスク群を有し、外周端を前記出力軸に近接配置した円板状の入力ディスクと、
前記出力軸に設けられ、複数枚の出力ディスクを軸方向に配列することにより構成されるセカンダリディスク群を有し、外周端を前記入力軸に近接配置した円板状の出力ディスクと、
前記プライマリディスク群と前記セカンダリディスク群が互いに重なり合うディスク重合領域を形成し、前記ディスク重合領域のうち、前記入力軸の軸心と前記出力軸の軸心を結ぶ軸心連結線上に沿って移動可能に設けられ、要求変速比に応じた位置にて前記ディスク重合領域の両側位置から挟持押圧し、両ディスクの弾性変形によりディスク同士の接触によるトルク伝達接触部を形成し、両ディスクを挟持押圧する押圧力を解除すると両ディスクの弾性復元力によりトルク伝達を遮断する一対の押圧手段と、を備え、
前記一対の押圧手段は、両ディスクの挟持押圧力として一定の付勢力と調整可能な付勢力の付勢力差による付勢力を付与する付勢手段と、変速条件に応じた最適な挟持押圧力を得るように、前記付勢手段による付勢力を調整する付勢力調整手段と、を有することを特徴とする変速機。 - 請求項1に記載された変速機において、
前記一対の押圧手段は、要求される低速段から高速段までの有段階の変速比に応じた複数の位置にて両ディスクを挟持押圧する手段であり、
前記付勢力調整手段は、隣接する第1の変速段から第2の変速段への変速中の付勢力を、第1の変速段と第2の変速段の位置での付勢力よりも低減することを特徴とする変速機。 - 請求項2に記載された変速機において、
前記付勢力調整手段は、高速段が選択されているときの付勢力を、低速段が選択されているときの付勢力よりも低減することを特徴とする変速機。 - 請求項1乃至請求項3の何れか1項に記載された変速機において、
前記付勢力調整手段は、付勢手段による付勢力を調整するカム面を形成したテンプレートと、前記カム面の面形状に沿って移動するカムフォロアと、を有して構成したことを特徴とする変速機。 - 請求項4に記載された変速機において、
前記テンプレートは、コイルスプリングによる付勢力が、互いに引き離す方向に作用する設定により一対配置され、
前記カムフォロアは、皿バネによる付勢力が、前記一対のテンプレートのカム面との接触面に作用する設定とし、
前記押圧手段に加えられる付勢力を、前記皿バネによる付勢力と前記コイルスプリングによる付勢力の付勢力差により調整することを特徴とする変速機。 - 請求項1乃至請求項5の何れか1項に記載された変速機において、
前記入力ディスクは、そのディスク面に前記入力軸の軸心から異なる半径にて同心状に形成された複数の入力側突条を有し、
前記出力ディスクは、そのディスク面に前記出力軸の軸心から異なる半径にて同心状に形成された複数の出力側突条を有し、
前記一対の押圧手段は、挟持押圧力の解除時に微小隙間が保たれた前記入力側突条と前記出力側突条の頂部同士を、要求される低速段から高速段までの有段階の変速比に応じて挟持押圧することを特徴とする変速機。
Priority Applications (15)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008221116A JP4668307B2 (ja) | 2008-08-29 | 2008-08-29 | 変速機 |
| US12/539,118 US8382637B2 (en) | 2008-08-29 | 2009-08-11 | Transmission |
| AT09167586T ATE496238T1 (de) | 2008-08-29 | 2009-08-11 | Mehrgängiges reibradgetriebe |
| DE602009000623T DE602009000623D1 (de) | 2008-08-29 | 2009-08-11 | Übertragung |
| AT09167587T ATE497117T1 (de) | 2008-08-29 | 2009-08-11 | Reibradgetriebe |
| US12/539,169 US8177678B2 (en) | 2008-08-29 | 2009-08-11 | Multistage transmission |
| EP09167586A EP2159450B1 (en) | 2008-08-29 | 2009-08-11 | Multistage friction gearing |
| EP09167585A EP2159449B1 (en) | 2008-08-29 | 2009-08-11 | Transmission |
| AT09167585T ATE496237T1 (de) | 2008-08-29 | 2009-08-11 | Übertragung |
| EP09167587A EP2159451B1 (en) | 2008-08-29 | 2009-08-11 | Friction gearing |
| US12/539,146 US20100056324A1 (en) | 2008-08-29 | 2009-08-11 | Transmission |
| DE602009000625T DE602009000625D1 (de) | 2008-08-29 | 2009-08-11 | Mehrgängiges Reibradgetriebe |
| DE602009000673T DE602009000673D1 (de) | 2008-08-29 | 2009-08-11 | Reibradgetriebe |
| CN200910167464.0A CN101660592B (zh) | 2008-08-29 | 2009-08-25 | 变速器 |
| KR1020090080140A KR101543038B1 (ko) | 2008-08-29 | 2009-08-28 | 변속기 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008221116A JP4668307B2 (ja) | 2008-08-29 | 2008-08-29 | 変速機 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010053995A JP2010053995A (ja) | 2010-03-11 |
| JP4668307B2 true JP4668307B2 (ja) | 2011-04-13 |
Family
ID=41319618
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008221116A Expired - Fee Related JP4668307B2 (ja) | 2008-08-29 | 2008-08-29 | 変速機 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US8382637B2 (ja) |
| EP (1) | EP2159451B1 (ja) |
| JP (1) | JP4668307B2 (ja) |
| KR (1) | KR101543038B1 (ja) |
| CN (1) | CN101660592B (ja) |
| AT (1) | ATE497117T1 (ja) |
| DE (1) | DE602009000673D1 (ja) |
Families Citing this family (65)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7011600B2 (en) | 2003-02-28 | 2006-03-14 | Fallbrook Technologies Inc. | Continuously variable transmission |
| DK1815165T3 (da) | 2004-10-05 | 2012-06-18 | Fallbrook Technologies Inc | Trinløst variabel transmission |
| US7632203B2 (en) | 2005-10-28 | 2009-12-15 | Fallbrook Technologies Inc. | Electromotive drives |
| ES2424652T3 (es) | 2005-11-22 | 2013-10-07 | Fallbrook Intellectual Property Company Llc | Transmisión continuamente variable |
| EP1963713B1 (en) | 2005-12-09 | 2015-02-25 | Fallbrook Intellectual Property Company LLC | Continuously variable transmission |
| EP1811202A1 (en) | 2005-12-30 | 2007-07-25 | Fallbrook Technologies, Inc. | A continuously variable gear transmission |
| US7882762B2 (en) | 2006-01-30 | 2011-02-08 | Fallbrook Technologies Inc. | System for manipulating a continuously variable transmission |
| CN102278200B (zh) | 2006-06-26 | 2014-05-14 | 福博科知识产权有限责任公司 | 无级变速器 |
| US8376903B2 (en) | 2006-11-08 | 2013-02-19 | Fallbrook Intellectual Property Company Llc | Clamping force generator |
| US8738255B2 (en) | 2007-02-01 | 2014-05-27 | Fallbrook Intellectual Property Company Llc | Systems and methods for control of transmission and/or prime mover |
| US20100093479A1 (en) | 2007-02-12 | 2010-04-15 | Fallbrook Technologies Inc. | Continuously variable transmissions and methods therefor |
| EP2122198B1 (en) | 2007-02-16 | 2014-04-16 | Fallbrook Intellectual Property Company LLC | Method and assembly |
| CN101720397B (zh) | 2007-04-24 | 2013-01-02 | 福博科技术公司 | 电力牵引传动装置 |
| WO2008154437A1 (en) | 2007-06-11 | 2008-12-18 | Fallbrook Technologies Inc. | Continuously variable transmission |
| KR101695855B1 (ko) | 2007-07-05 | 2017-01-13 | 폴브룩 인텔렉츄얼 프로퍼티 컴퍼니 엘엘씨 | 연속 가변 변속기 |
| CN103939602B (zh) | 2007-11-16 | 2016-12-07 | 福博科知识产权有限责任公司 | 用于变速传动装置的控制器 |
| CA2708634C (en) | 2007-12-21 | 2017-08-01 | Fallbrook Technologies Inc. | Automatic transmissions and methods therefor |
| WO2009111328A1 (en) | 2008-02-29 | 2009-09-11 | Fallbrook Technologies Inc. | Continuously and/or infinitely variable transmissions and methods therefor |
| US8317651B2 (en) | 2008-05-07 | 2012-11-27 | Fallbrook Intellectual Property Company Llc | Assemblies and methods for clamping force generation |
| JP5457438B2 (ja) | 2008-06-06 | 2014-04-02 | フォールブルック インテレクチュアル プロパティー カンパニー エルエルシー | 無限可変変速機、及び無限可変変速機用の制御システム |
| EP2304272B1 (en) | 2008-06-23 | 2017-03-08 | Fallbrook Intellectual Property Company LLC | Continuously variable transmission |
| CA2732668C (en) | 2008-08-05 | 2017-11-14 | Fallbrook Technologies Inc. | Methods for control of transmission and prime mover |
| US8469856B2 (en) | 2008-08-26 | 2013-06-25 | Fallbrook Intellectual Property Company Llc | Continuously variable transmission |
| US8167759B2 (en) | 2008-10-14 | 2012-05-01 | Fallbrook Technologies Inc. | Continuously variable transmission |
| KR101820351B1 (ko) | 2009-04-16 | 2018-02-28 | 폴브룩 인텔렉츄얼 프로퍼티 컴퍼니 엘엘씨 | 무단 변속기를 위한 고정자 조립체 및 시프팅 장치 |
| US8512195B2 (en) | 2010-03-03 | 2013-08-20 | Fallbrook Intellectual Property Company Llc | Infinitely variable transmissions, continuously variable transmissions, methods, assemblies, subassemblies, and components therefor |
| US8888643B2 (en) | 2010-11-10 | 2014-11-18 | Fallbrook Intellectual Property Company Llc | Continuously variable transmission |
| CA2830929A1 (en) | 2011-04-04 | 2012-10-11 | Fallbrook Intellectual Property Company Llc | Auxiliary power unit having a continuously variable transmission |
| MX350737B (es) | 2012-01-23 | 2017-09-15 | Fallbrook Ip Co Llc | Transmisiones infinitamente variables, transmisiones continuamente variables, métodos, montajes, submontajes y componentes para estas. |
| WO2013145185A1 (ja) * | 2012-03-28 | 2013-10-03 | ジヤトコ株式会社 | 無段変速機 |
| US20150045177A1 (en) | 2012-03-28 | 2015-02-12 | Jatco Ltd | Continuously variable transmission |
| JP5788080B2 (ja) * | 2012-03-28 | 2015-09-30 | ジヤトコ株式会社 | 無段変速機 |
| JP5830164B2 (ja) * | 2012-03-28 | 2015-12-09 | ジヤトコ株式会社 | 無段変速機、及びその制御方法 |
| KR20140129256A (ko) * | 2012-03-28 | 2014-11-06 | 쟈트코 가부시키가이샤 | 무단 변속기 |
| WO2013145173A1 (ja) * | 2012-03-28 | 2013-10-03 | ジヤトコ株式会社 | 無段変速機 |
| KR101601581B1 (ko) * | 2012-03-28 | 2016-03-08 | 쟈트코 가부시키가이샤 | 무단 변속기 |
| WO2013145169A1 (ja) * | 2012-03-28 | 2013-10-03 | ジヤトコ株式会社 | 無段変速機 |
| KR20150084935A (ko) * | 2013-01-18 | 2015-07-22 | 쟈트코 가부시키가이샤 | 멀티 디스크 변속기 |
| JP2016084822A (ja) * | 2013-01-21 | 2016-05-19 | ジヤトコ株式会社 | マルチディスク変速機 |
| WO2014122848A1 (ja) * | 2013-02-05 | 2014-08-14 | ジヤトコ株式会社 | マルチディスク変速機 |
| JP5926442B2 (ja) * | 2013-03-07 | 2016-05-25 | ジヤトコ株式会社 | マルチディスク変速機 |
| WO2014136469A1 (ja) * | 2013-03-07 | 2014-09-12 | ジヤトコ株式会社 | マルチディスク変速機 |
| JP5905639B2 (ja) * | 2013-03-12 | 2016-04-20 | ジヤトコ株式会社 | マルチディスク変速機 |
| JP6660876B2 (ja) | 2013-04-19 | 2020-03-11 | フォールブルック インテレクチュアル プロパティー カンパニー エルエルシー | 連続可変変速機 |
| JP5891204B2 (ja) * | 2013-05-13 | 2016-03-22 | ジヤトコ株式会社 | マルチディスク変速機 |
| WO2014185257A1 (ja) * | 2013-05-13 | 2014-11-20 | ジヤトコ株式会社 | マルチディスク変速機 |
| JPWO2014208214A1 (ja) * | 2013-06-25 | 2017-02-23 | ジヤトコ株式会社 | マルチディスク変速機のシフト機構 |
| JP5934157B2 (ja) * | 2013-08-21 | 2016-06-15 | ジヤトコ株式会社 | マルチディスク変速機 |
| JP5768102B2 (ja) * | 2013-09-24 | 2015-08-26 | ジヤトコ株式会社 | マルチディスク変速機 |
| JP2015064033A (ja) * | 2013-09-24 | 2015-04-09 | ジヤトコ株式会社 | マルチディスク変速機 |
| JP5736426B2 (ja) * | 2013-09-24 | 2015-06-17 | ジヤトコ株式会社 | マルチディスク変速機 |
| JP5820860B2 (ja) * | 2013-09-24 | 2015-11-24 | ジヤトコ株式会社 | マルチディスク変速機 |
| JP5740444B2 (ja) * | 2013-09-24 | 2015-06-24 | ジヤトコ株式会社 | マルチディスク変速機 |
| JP5814996B2 (ja) * | 2013-09-24 | 2015-11-17 | ジヤトコ株式会社 | マルチディスク変速機 |
| JP5795786B2 (ja) * | 2013-09-24 | 2015-10-14 | ジヤトコ株式会社 | マルチディスク変速機 |
| JP2015064058A (ja) * | 2013-09-25 | 2015-04-09 | ジヤトコ株式会社 | マルチディスク変速機 |
| JP6006886B2 (ja) * | 2013-10-07 | 2016-10-12 | ジヤトコ株式会社 | マルチディスク変速機 |
| JP2015108426A (ja) * | 2013-12-05 | 2015-06-11 | ジヤトコ株式会社 | ホイール駆動装置 |
| WO2015190137A1 (ja) * | 2014-06-12 | 2015-12-17 | ジヤトコ株式会社 | マルチディスク変速機及びホイール駆動装置 |
| JP5901700B2 (ja) * | 2014-06-20 | 2016-04-13 | ジヤトコ株式会社 | マルチディスク変速機及びその制御方法 |
| US10047861B2 (en) | 2016-01-15 | 2018-08-14 | Fallbrook Intellectual Property Company Llc | Systems and methods for controlling rollback in continuously variable transmissions |
| CN109154368B (zh) | 2016-03-18 | 2022-04-01 | 福博科知识产权有限责任公司 | 无级变速器、系统和方法 |
| US10023266B2 (en) | 2016-05-11 | 2018-07-17 | Fallbrook Intellectual Property Company Llc | Systems and methods for automatic configuration and automatic calibration of continuously variable transmissions and bicycles having continuously variable transmissions |
| US11215268B2 (en) | 2018-11-06 | 2022-01-04 | Fallbrook Intellectual Property Company Llc | Continuously variable transmissions, synchronous shifting, twin countershafts and methods for control of same |
| US11174922B2 (en) | 2019-02-26 | 2021-11-16 | Fallbrook Intellectual Property Company Llc | Reversible variable drives and systems and methods for control in forward and reverse directions |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB392917A (en) * | 1930-11-24 | 1933-05-24 | Eugen Mandler | Improvements in or relating to friction gears |
| US3871239A (en) * | 1973-08-02 | 1975-03-18 | Twin Disc Inc | Variable speed drive |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US1251784A (en) * | 1914-10-12 | 1918-01-01 | Inman Mfg Company Inc | Gearing. |
| US1814165A (en) * | 1929-08-12 | 1931-07-14 | J F S Company | Variable speed transmission |
| US2958229A (en) * | 1959-09-04 | 1960-11-01 | Sorkin Morris | Variable speed drive |
| US3143895A (en) * | 1962-07-16 | 1964-08-11 | Electro Refractories & Abrasiv | Device for transmitting motion |
| FR1523231A (fr) * | 1967-02-14 | 1968-05-03 | Dispositifs utilisant un entraînement par friction entre deux surfaces lisses en milieu liquide | |
| US4344333A (en) * | 1978-10-30 | 1982-08-17 | Mikina Stanley J | Variable speed transmission |
| JPH0193658A (ja) * | 1987-10-05 | 1989-04-12 | Fuji Heavy Ind Ltd | 車輛用無段変速装置 |
| JPH0639159Y2 (ja) | 1989-05-31 | 1994-10-12 | 住友重機械工業株式会社 | 機械式無段変速機 |
| NL9300492A (nl) * | 1993-03-19 | 1994-10-17 | Heerke Hoogenberg | Mechanische overbrenging. |
| JP2008224306A (ja) | 2007-03-09 | 2008-09-25 | Nippon Telegraph & Telephone East Corp | スペクトラム解析装置 |
| JP2008221116A (ja) | 2007-03-12 | 2008-09-25 | Imp:Kk | 粉粒体の定量供給装置 |
-
2008
- 2008-08-29 JP JP2008221116A patent/JP4668307B2/ja not_active Expired - Fee Related
-
2009
- 2009-08-11 AT AT09167587T patent/ATE497117T1/de not_active IP Right Cessation
- 2009-08-11 US US12/539,118 patent/US8382637B2/en not_active Expired - Fee Related
- 2009-08-11 EP EP09167587A patent/EP2159451B1/en not_active Not-in-force
- 2009-08-11 DE DE602009000673T patent/DE602009000673D1/de active Active
- 2009-08-25 CN CN200910167464.0A patent/CN101660592B/zh not_active Expired - Fee Related
- 2009-08-28 KR KR1020090080140A patent/KR101543038B1/ko active IP Right Grant
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB392917A (en) * | 1930-11-24 | 1933-05-24 | Eugen Mandler | Improvements in or relating to friction gears |
| US3871239A (en) * | 1973-08-02 | 1975-03-18 | Twin Disc Inc | Variable speed drive |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2010053995A (ja) | 2010-03-11 |
| EP2159451B1 (en) | 2011-01-26 |
| ATE497117T1 (de) | 2011-02-15 |
| DE602009000673D1 (de) | 2011-03-10 |
| US8382637B2 (en) | 2013-02-26 |
| EP2159451A1 (en) | 2010-03-03 |
| CN101660592A (zh) | 2010-03-03 |
| US20100056323A1 (en) | 2010-03-04 |
| KR20100027038A (ko) | 2010-03-10 |
| KR101543038B1 (ko) | 2015-08-07 |
| CN101660592B (zh) | 2014-07-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4668307B2 (ja) | 変速機 | |
| JP4550924B2 (ja) | 多段変速機 | |
| JP4822370B2 (ja) | 変速機 | |
| US10030751B2 (en) | Infinite variable transmission with planetary gear set | |
| US20150252881A1 (en) | Ivt based on a ball-type cvp including powersplit paths | |
| US6866606B2 (en) | Continuously variable transmission system for vehicles | |
| US20050155826A1 (en) | Friction engaging device | |
| EP2159450B1 (en) | Multistage friction gearing | |
| JP4694520B2 (ja) | 摩擦伝動変速装置 | |
| WO2011108107A1 (ja) | 車両用ベルト式無段変速機 | |
| JP2010249214A (ja) | 無段変速機 | |
| JP2002048213A (ja) | 無段変速機構を備えた変速機 | |
| JP4039366B2 (ja) | ベルト式無段変速機 | |
| US6520884B2 (en) | Torque-split type continuously variable transmission | |
| US20190293129A1 (en) | Frictional coupling device of vehicular power transmitting system | |
| EP2159449B1 (en) | Transmission | |
| US20100167868A1 (en) | Friction type continuously variable transmission | |
| JP2003049912A (ja) | トロイダル型無段変速機 | |
| JP5901700B2 (ja) | マルチディスク変速機及びその制御方法 | |
| JP2005331078A (ja) | 無段変速機 | |
| JP2019019960A (ja) | ベルト式無段変速機 | |
| JP2010216516A (ja) | 摩擦伝動装置 | |
| JP2010270903A (ja) | 無段変速装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100210 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100617 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100622 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100818 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110111 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110112 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140121 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4668307 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140121 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150121 Year of fee payment: 4 |
|
| LAPS | Cancellation because of no payment of annual fees |