JP4575774B2 - 駆動体及びその製造方法 - Google Patents
駆動体及びその製造方法 Download PDFInfo
- Publication number
- JP4575774B2 JP4575774B2 JP2004537991A JP2004537991A JP4575774B2 JP 4575774 B2 JP4575774 B2 JP 4575774B2 JP 2004537991 A JP2004537991 A JP 2004537991A JP 2004537991 A JP2004537991 A JP 2004537991A JP 4575774 B2 JP4575774 B2 JP 4575774B2
- Authority
- JP
- Japan
- Prior art keywords
- actuator element
- exchange resin
- ion exchange
- shape
- actuator
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images


Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N11/00—Generators or motors not provided for elsewhere; Alleged perpetua mobilia obtained by electric or magnetic means
- H02N11/006—Motors
Landscapes
- Micromachines (AREA)
- Chemically Coating (AREA)
Description
前記高分子アクチュエータとしては、固体電解質であるイオン交換樹脂成形品の表面に相互に絶縁状態である金属電極を備えたアクチュエータ素子が知られ、その一態様として、例えば、特許第2961125号公報または特許第3030361号公報には、円筒状のアクチュエータ素子が記載されている。
しかし、例えば、前記アクチュエータを医療用機器であるカテーテルに用いた場合には、アクチュエータ素子は、治療のために人体の血管の内部に挿入されて複雑な経路を経て目的部位に進行するので、駆動時の変位量がより大きいことが望ましい。さらに、カテーテルを用いた治療を効率良く短時間に終わらせるために、前記アクチュエータ素子の変位速度は、より速いことが望ましい。
また、高分子アクチュエータは、医療用機器に限らず、ロボットハンドの指部に代表される位置決め装置、姿勢制御装置、昇降装置、搬送装置、移動装置、調節装置、調整装置、誘導装置、関節装置、切替え装置、反転装置、巻取り装置、牽引装置、または旋回装置にも用いることが可能である。しかし、実験的な用途にとどまらず、実用的な用途に高分子アクチュエータを用いるためには、前記アクチュエータの屈曲(屈曲量)は、従来よりも大きいことが好適である。
上記の固体電解質であるイオン交換樹脂成形品の表面に相互に絶縁状態である金属電極を備えたアクチュエータ素子は、電極層とイオン交換樹脂である固定電解質層とを備えている。そのため前記アクチュエータ素子の湾曲または変形の能力は、固体電解質の変形若しくは変位のし易さ並びに電極層の可撓性若しくは伸縮性に大きく依存することになる。前記固体電解質は、例えば耐久性が要求されるアクチュエータ素子においては材料が限定されてしまうために、アクチュエータ素子としての屈曲の向上を制限する。特に、前記電極層は、通電性を確保するために金属成分を主とする構成を有しているので可撓性若しくは伸縮性が小さく、アクチュエー素子としての屈曲を制限することとなる。このため、アクチュエータ素子の屈曲を向上させる方法として、アクチュエータ素子を構成する材料を選択する方法には限界がある。
すなわち、アクチュエータ素子において、アクチュエータ素子を主として構成する材料を変えることなしに、優れた屈曲(屈曲量)を備えたアクチュエータ素子を容易に提供することが課題となる。
また、本発明は、アクチュエータ素子の製造方法であって、イオン交換樹脂成形品にワイヤーを捲きつけることのより表面に螺旋状の凹凸を設ける工程、この凹凸を設けたイオン交換樹成形品に金属錯体を吸着させる工程、前記イオン交換樹脂成形品に吸着された金属錯体に還元剤を作用させることにより前記イオン交換樹脂の表面に金属を析出させる工程、及び金属が析出したイオン交換樹脂を洗浄液で洗浄する工程を含むアクチュエータ素子の製造方法である。アクチュエータ素子が屈曲する方向に面する表面に凹凸を備え、前記凹凸が屈曲を容易にするための波形形状を形成するアクチュエータ素子は、この製造方法を用いることにより、容易に製造される。
第2図は、第1図のアクチュエータ素子についての概略縦断面図である。
第3図は、本発明のアクチュエータ素子の一実施態様例についての概略斜視図である。
(アクチュエータ素子)
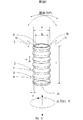
図1は、アクチュエータ素子の一実施態様例についての概略斜視図である。アクチュエータ素子1は、アクチュエータ素子が屈曲する方向に面する表面に凹凸を備え、前記凹凸が屈曲を容易にするための波形形状を形成するアクチュエータ素子である。アクチュエータ素子1は、管状であり、凸部2及び凹部3を備え、端部Aと端部Bの両方に開口部4を備えている。凸部2及び凹部3を具備する前記アクチュエータ素子の外側面は、略円筒状を形成していることから、4方向である屈曲方向に面することができる。
図1中のアクチュエータ素子1は、アクチュエータ素子の外側面に凹凸が形成されている。前記外側面において、前記凹凸が周方向Xに沿ってアクチュエータ素子の周囲を一巡する連続した凹凸が形成されている。前記アクチュエータ素子は、全体として蛇腹状に形成され、屈曲運動の幅方向に直行する軸Yの方向に対してアクチュエータ素子全体に波形形状が形成されている。
本発明のアクチュエータ素子は、アクチュエータ素子が屈曲する方向に面する表面に凹凸を備え、前記凹凸が屈曲を容易にするための波形形状を形成していれば、特に限定されるものではない。前記波形形状は、屈曲運動の先端となる端部付近(例えば図1のA付近)またはその反対側の端部付近(例えば図1のB付近)の一部分に形成されてもよく、屈曲運動の幅方向に直行する軸Yの方向に対してアクチュエータ素子の略全体に形成されても良い。また、アクチュエータ素子の屈曲が、例えば振幅のような、特定の方向にのみ屈曲運動する場合には、当該屈曲運動の方向に面する表面にのみ前記波形形状を形成することが、製造を容易にするために好ましい。本発明のアクチュエータ素子をカテーテル等のアクチュエータとして用いる場合など、先端部分が方向に制限されることなく大きな屈曲をすることが要求される用途に用いる場合には、本発明のアクチュエータ素子の波形形状は、周方向に沿ってアクチュエータ素子の周囲を一巡する連続した凹凸により形成されることが好ましい。前記表面は、略平面であっても良く、図1の様に曲面であっても良い。
本発明のアクチュエータ素子において、波形形状に形成されている部分がアクチュエータ素子の一部分である場合には、アクチュエータ素子の両方の端部のうち少なくともどちらか一の端部付近において波形形状に形成された部分が備えられていることが好ましい。アクチュエータ素子の両方の端部のうちのどちらか一の端部付近において波形形状に形成された部分が備えられ、前記波形形状に形成された端部が支持体等に固定された場合には、波形形状の部分が比較的短くても、他の端部は大きく変位することができるからである。特に前記アクチュエータ素子がカテーテルの先端に用いられる場合には、カテーテルの誘導を容易に行うことができるようにするために、カテーテルの最先端部分の対応する端部が蛇腹状に形成されていることが好ましい。
図1に示すように、凹凸により波形形状が形成されたアクチュエータ素子は、アクチュエータ素子である管状体に交互に凸部と凹部とが形成されて、蛇腹状を形成している。前記アクチュエータ素子は、屈曲する方向に面する表面に凹凸を備え、前記凹凸が屈曲を容易にするための波形形状を形成するアクチュエータ素子の一態様でもある。
図2は、図1に示したアクチュエータ素子1の概略縦断面図である。アクチュエータ素子1には電極層5と固体電解質層6とを備えている。本発明の蛇腹状に形成された管状のアクチュエータ素子は、湾曲若しくは変形が可能なアクチュエータ素子であって、全体または部分的に蛇腹状に形成されたアクチュエータ素子であれば、構成が特に限定されるものではないが、図2に示すように、湾曲を可能とするために電極層と固体電解質層とを備えていることが好ましい。本発明のアクチュエータ素子は、蛇腹状に形成されているので、蛇腹状に形成されて部分についても電極層と固体電解質層とを備えている。前記電極層に通電することにより前記固体電解質層が屈曲若しくは変位を生じるのである。前記電極層は、アクチュエータ素子1が屈曲可能な様に形成されていれば良い。特に、屈曲可能な素子を容易に形成することができることから、前記アクチュエータ素子の電極層は、軸方向に形成された絶縁溝を備えることにより互いに絶縁された2以上の電極層であることが好ましい。前記電極層は、軸方向に形成された絶縁溝により電極層が円周方向に互いに絶縁された状態で分割されることが、軸Yに垂直方向に自由に屈曲できるために好ましい。分割された一の電極層が軸方向に形成された前記絶縁溝により他の電極層と互いに絶縁されることにより、アクチュエータ素子1は、軸Yに垂直方向に自由に屈曲できる。
図3は、本発明のアクチュエータ素子であって、螺旋状に形成されているアクチュエータ素子1’を示す概略斜視図である。本発明は、アクチュエータ素子が屈曲する方向に面する表面に凹凸を備え、前記凹凸が屈曲を容易にするための波形形状を形成するアクチュエータ素子の一態様であり、表面の凹凸が螺旋状に形成されたアクチュエータ素子でもある。螺旋状に形成された管状のアクチュエータ素子1’は、図1の蛇腹状に形成された管状のアクチュエータ素子1を同様に、凸部2’及び凹部3’を備え、端部A’と端部B’の両方に開口部4’を備えている。
図3のアクチュエータ素子1’は、アクチュエータ素子の略全体が螺旋状に形成されている。本発明の螺旋状に形成されたアクチュエータ素子は、蛇腹状に形成されたアクチュエータ素子と同様に、大きな屈曲をすることができるのでアクチュエータ素子1’のように屈曲運動の幅方向に直行する軸方向の略全体に形成されることが好ましい。また、本発明のアクチュエータ素子は、螺旋状に形成されている部分がアクチュエータ素子の一部分である場合には、蛇腹状に形成されたアクチュエータ素子と同様に、アクチュエータ素子の両方の端部のうち少なくともどちらか一の端部付近に螺旋状に形成された部分が備えられていることが好ましい。アクチュエータ素子1’は、図1のアクチュエータ素子1と同様に、外側面に電極層を備える。また、アクチュエータ素子1’は、図1のアクチュエータ素子1と同様の理由により、絶縁溝を備えることが好ましい。
本発明のアクチュエータ素子は、図1〜3のアクチュエータ素子1及びアクチュエータ素子1’では中空管状の形状をしているが、中空管状の形状に限定されるものではない。本発明のアクチュエータ素子は、屈曲する方向に面する表面に凹凸を備え、前記凹凸が屈曲を容易にするための波形形状を形成するアクチュエータ素子であれば、形状について特に限定されず、例えば、球状、立方、柱状、錐状、棒状、管状、筒状等の立体形状が蛇腹状に形成されたものであってもよい。特に、本発明のアクチュエータ素子は、長手方向を有する立体形状物であることが、屈曲運動を容易にすることができ、より大きな機械的エネルギーを得ることができるので好ましい。前記長手方向を有する立体形状物としては、柱状体、錐状体、棒状体、管状体及び筒状体を例示することができ、中空であってもよい。本発明のアクチュエータ素子が、中空の管状または筒状である場合には、屈曲する方向に面する表面に備えられた凹凸が形成する波形形状が外周面に形成されていても内周面に形成されていても良いが、より大きな屈曲をすることができるので、前記波形形状が外周面及び内周面の両方に形成されていることがより好ましく、さらに波形形状が蛇腹状若しくは螺旋状に形成されていることが特に好ましい。
本発明のアクチュエータ素子について、アクチュエータ素子が屈曲する方向に面する表面に凹凸を備え、前記凹凸が屈曲を容易にするための波形形状を形成するアクチュエータ素子の形成方法は、特に限定されるものではなく、公知の形成方法で形成することができる。例えば、前記波形形状が形成された管状のアクチュエータ素子は、金型等で蛇腹状の管状に形成されたイオン交換樹脂成形品に、公知の方法によりメッキを施して金属の電極層を形成することにより得ることができるが、以下の方法で得ることが好ましい。
即ち、アクチュエータ素子の製造方法であって、イオン交換樹脂成形品にワイヤーを捲きつけることのより表面に螺旋状の凹凸を設ける工程、この凹凸を設けたイオン交換樹成形品に金属錯体を吸着させる工程、前記イオン交換樹脂成形品に吸着された金属錯体に還元剤を作用させることにより前記イオン交換樹脂の表面に金属を析出させる工程、及び金属が析出したイオン交換樹脂を洗浄液で洗浄する工程、
を含むアクチュエータ素子の製造方法により、前記アクチュエータ素子を容易な作業により形成することができる。
また、本発明である螺旋状に形成された管状アクチュエータ素子は、蛇腹状に形成された管状のアクチュエータ素子と同様に、全体または一部分に螺旋状に形成された部分を備えているが、この螺旋状に形成さている部分の形成方法、特に限定されるものではなく、公知の形成方法で形成することができる。例えば、蛇腹状に形成された管状のアクチュエータ素子は、固体電解質の管状体として、蛇腹状の管状のイオン交換樹脂成形品に公知の方法によりメッキを施して金属の電極層を形成することにより簡単に得ることができるが、以下の方法で得ることが好ましい。
蛇腹状に形成されたアクチュエータ素子の製造方法としては、管状体であるイオン交換樹脂成形品に所定の直径のワイヤーを捲きつけて管状体の表面に蛇腹状の凹凸を設ける工程、この凹凸を設けた管状のイオン交換樹成形品に金属錯体を吸着させる工程、前記イオン交換樹脂成形品に吸着された金属錯体に還元剤を作用させることにより前記イオン交換樹脂の表面に金属を析出させる工程、及び、金属が析出したイオン交換樹脂を洗浄液で洗浄する工程を含むアクチュエータ素子の製造方法を用いることにより、本発明である蛇腹状に形成されたアクチュエータ素子を簡便な方法で形成することができる。なお、前記ワイヤーの直径は、所望の凹凸を管状のアクチュエータ素子に与えるために、適宜選択されれば良い。
また、螺旋状に形成された管状アクチュエータ素子を得る方法としては、アクチュエータ素子の製造方法であって、イオン交換樹脂成形品にワイヤーを捲きつけることのより表面に螺旋状の凹凸を設ける工程、この凹凸を設けたイオン交換樹成形品に金属錯体を吸着させる工程、前記イオン交換樹脂成形品に吸着された金属錯体に還元剤を作用させることにより前記イオン交換樹脂の表面に金属を析出させる工程、及び金属が析出したイオン交換樹脂を洗浄液で洗浄する工程を含むアクチュエータ素子の製造方法である。
本発明である蛇腹状に形成された管状のアクチュエータ素子及び螺旋状に形成された管状アクチュエータ素子は、凸部及び凹部を備えているが、凸部の頂部と凹部の底部が、角を形成していても曲面を形成していても良いが、凸部の頂部と凹部の底部とにも容易にメッキを施すこができ、アクチュエータ素子の屈曲または変位の際に前記頂部若しくは前記底部とにおいての電極層の断線が生じにくいので、凸部の頂部と凹部の底部とが曲面を形成していることが好ましい。また、前記アクチュエータ素子における凹凹間ピッチ(図1または図3におけるdまたはd’)は、特に限定されるものではないが、管状体の直径0.8mmに対して0.1〜0.3mmであれば凸部の頂部と凹部の底部とにも容易にメッキを施すこができるので好ましい。また、凸部の頂部と凹部の底部との差である凹凸の深さ(図1または3におけるeまたはe’)は、特に限定されるものではないが、アクチュエータ素子の厚さ(図1または図3におけるa−b、またはa’−b’)に対して10%〜200%であることが好ましい。
(固定電解質層及び電極層)
また、本願における発明であるアクチュエータ素子が屈曲する方向に面する表面に凹凸を備え、前記凹凸が屈曲を容易にするための波形形状を形成するアクチュエータ素子は、図2に示すように、屈曲可能な構造を容易に形成することができることから、固定電解質層と電極層とを備えていることが好ましい。前記固体電極層としては、特に限定されるものではなく、イオン交換樹脂を用いることが好ましい。特に、前記固体電解質層は、耐久性のためにフッ素系イオン交換樹脂を用いることがより好ましい。前記電極層についても特に限定されるものではなく、通電性を有する層であれば特に限定されるものではないが、固体電解質にメッキを施すことにより簡単に電極層を形成することができることから、金属電極層であることが好ましく、通電性の良い銅(Cu)、金(Au)、銀(Ag)、白金(Pt)などの電導性金属を主として含む電極層であることがより好ましい。
(用途)
前記アクチュエータ素子は、多数の部品を必要としないために、構造が簡単であり、屈曲が大きく、しかも軽量であることから、種々の装置の駆動部または押圧部に好適に用いることができる。つまり、アクチュエータ素子が屈曲する方向に面する表面に凹凸を備え、前記凹凸が屈曲を容易にするための波形形状を形成するアクチュエータ素子は、位置決め装置、姿勢制御装置、昇降装置、搬送装置、移動装置、調節装置、調整装置、誘導装置、及び関節装置として好適である。また、前記アクチュエータ素子は押圧装置として好適である。
前記アクチュエータ素子は、OA機器、アンテナ、ベッドや椅子等の人を乗せる装置、医療機器、エンジン、光学機器、固定具、サイドトリマ、車両、昇降器械、食品加工装置、清掃装置、測定機器、検査機器、制御機器、工作機械、加工機械、電子機器、電子顕微鏡、電気かみそり、電動歯ブラシ、マニピュレータ、マスト、遊戯装置、アミューズメント機器、乗車用シミュレーション装置、車両乗員の押さえ装置及び航空機用付属装備展張装置において、円弧部からなるトラック型の軌道を移動するための駆動力を発生する駆動部、または曲線的な動作をする押圧部として好適に用いることができる。前記アクチュエータは、例えば、OA機器や測定機器等の上記機器等を含む機械全般に用いられる弁、ブレーキ及びロック装置において、円弧部からなるトラック型の軌道を移動するための駆動力を発生する駆動部、または曲線的な動作をする押圧部として用いることができる。また、前記アクチュエータ素子は、前記の装置、機器、器械等以外においても、機械機器類全般において、位置決め装置の駆動部、姿勢制御装置の駆動部、昇降装置の駆動部、搬送装置の駆動部、移動装置の駆動部、量や方向等の調節装置の駆動部、軸等の調整装置の駆動部、誘導装置の駆動部、及び押圧装置の押圧部として好適に用いることができる。また、前記アクチュエータ素子は、関節装置における駆動部として、関節部または関節に回転運動を与える駆動部に好適に用いることができる。
(イオン交換樹脂成形品A及びBの製造例)
イオン交換膜(パーフルオロカルボン酸樹脂、イオン交換容量1.80meq/g、商品名「フレミオン」、旭硝子社製)を用いて公知の射出成形方法によりa=0.8mm、b=0.5mm、c=20mm、d=1.5mmの蛇腹状の管状体であるイオン交換樹脂成形品Aを得た。イオン交換膜(パーフルオロカルボン酸樹脂、イオン交換容量1.80meq/g、商品名「フレミオン」、旭硝子社製)を用いて公知の射出成形方法により、a=0.6mm、b=0.4mm、c=20mm、d=1.5mmの蛇腹状の管状体であるイオン交換樹脂成形品Bを得た。
(イオン交換樹脂成形品Cの製造例)
イオン交換膜(パーフルオロカルボン酸樹脂、商品名「フレミオン」、旭硝子社製)を用いて公知の射出成形方法により円筒状の管状体を成形し、その管状体にワイヤーを螺旋状に捲きつけることにより表面に螺旋状の凹凸を設けて、a=0.6mm、b=0.4mm、c=20mm、d=1.5mmのである螺旋状に形成されたイオン交換樹脂成形品を得た。
(イオン交換樹脂成形品Dの製造例)
イオン交換膜(パーフルオロカルボン酸樹脂、商品名「フレミオン」、旭硝子社製)を用いて公知の射出成形方法により円筒状の管状体を成形し、a=0.6mm、b=0.4mm、c=20mmのである円筒状のイオン交換樹脂成形品を得た。
(実施例2及び3)
イオン交換樹脂成形品Aの替わりに、イオン交換樹脂成形品Bまたはイオン交換樹脂成形品Cを用いたこと以外は、実施例1と同様の方法によりアクチュエータ素子を得て、それぞれ実施例2または実施例3の蛇腹状または螺旋状に形成されたアクチュエータ素子とした。
(比較例)
イオン交換樹脂成形品Aの替わりに、イオン交換樹脂成形品Dを用いたこと以外は、実施例1と同様の方法によりアクチュエータ素子を得て、比較例1の凹凸のない円筒状のアクチュエータ素子とした。
(評価)
実施例1〜3及び比較例の各アクチュエータ素子について、それぞれの電極にそれぞれリード取り付けて電源と接続した。各アクチュエータ素子について、アクチュエータ素子の一端を支持体で固定して、先端(他端)が鉛直下向きとなるように水中に設置し、鉛直下向き0.1Hzの矩形波で2.0V、2.5V、及び3.0Vの電圧をそれぞれ30秒間印加し、アクチュエータ素子の支持体による固定部分からアクチュエータ素子先端部分までについての曲がりを円に近似して極率半径を測定し、下記の評価基準で評価した。結果は表1に示す。
(評価基準)
○:30秒間の印加による屈曲で、極率半径が6mm以下で良好である。
△:30秒間の印加による屈曲で、極率半径が7mm以上、8mm以下であり、カテーテル等のアクチュエータ素子として実用可能である。
×:30秒間の印加による屈曲で、極率半径が9mm以上であり、カテーテル等の大きな屈曲が要求されるアクチュエータ素子には不向きである。

実施例1及び2のアクチュエータ素子は、蛇腹状に成形された管状のアクチュエータ素子であり、表面に凹凸が形成されていない従来のアクチュエータ素子である比較例のアクチュエータ素子と比べて、30秒という短時間に従来より大きな屈曲が得られ、良好であった。特に、印加電圧3.0Vにおいては、極率半径が約2倍小さく、従来にない大きな屈曲が得られ、優れた屈曲を示した。
実施例3のアクチュエータ素子は、螺旋状に成形された管状のアクチュエータ素子であり、側面に対して凹凸が形成されていない従来のアクチュエータ素子である比較例のアクチュエータ素子と比べて、30秒という短時間に従来より大きな屈曲が得られ、良好であった。特に、印加電圧3.0Vにおいては、極率半径が約2倍小さく、従来にない大きな屈曲が得られ、優れた屈曲を示した。
即ち、本発明のアクチュエータ素子であるアクチュエータ素子が屈曲する方向に面する表面に凹凸を備え、前記凹凸が屈曲を容易にするための波形形状を形成するアクチュエータ素子は、実施例1〜3に示すように優れた屈曲を示した。
本発明のアクチュエータ素子が高分子アクチュエータ素子である場合には、マイクロサージェリー技術におけるピンセット、ハサミ、鉗子、スネア、レーザメス、スパチュラ、クリップなどの医療器具、検査や補修等を行う各種センサー若しくは補修用工具など、健康器具、湿度計、湿度計コントロール装置、ソフトマニュピュレーター、水中バルブ、ソフト運搬装置などの工業用機器、金魚などの水中モービル、または動く釣り餌や推進ヒレなどのホビー用品などの水中で用いられる物品についても好適に使用することができる。
また、前記アクチュエータ素子は、多数の部品を必要としないために、構造が簡単であり、屈曲が大きく、しかも軽量であることから、位置決め装置、姿勢制御装置、昇降装置、搬送装置、移動装置、調節装置、調整装置、誘導装置、関節装置、及び押圧装置として好適である。
Claims (7)
- 固体電解質層上に、対となる金属層を備え、該対となる金属層が前記アクチュエータ素子の外側面に長手方向に沿って絶縁溝で絶縁されて形成され、
アクチュエータ素子が屈曲する方向に面する表面に凹凸を備え、
前記凹凸が屈曲を容易にするための波形形状を形成するアクチュエータ素子。 - 前記アクチュエータ素子の形状が、長手方向を有する柱状体、管状体、錘状体、棒状体、または筒状体である請求項1に記載のアクチュエータ素子。
- 前記表面の凹凸が蛇腹状である請求項1または2に記載のアクチュエータ素子。
- 前記表面の凹凸が螺旋状に形成された請求項1または2に記載のアクチュエータ素子。
- 請求項4に記載のアクチュエータ素子の製造方法であって、
イオン交換樹脂成形品にワイヤーを捲きつけることにより表面に螺旋状の凹凸を設ける工程、
この凹凸を設けたイオン交換樹成形品に金属錯体を吸着させる工程、
前記イオン交換樹脂成形品に吸着された金属錯体に還元剤を作用させることにより前記イオン交換樹脂の表面に金属を析出させる工程、及び
金属が析出したイオン交換樹脂を洗浄液で洗浄する工程を含むアクチュエータ素子の製造方法。 - 請求項1から4に記載のアクチュエータ素子、または請求項5に記載のアクチュエータ素子の製造方法で製造されたアクチュエータ素子を駆動部に用いた位置決め装置、姿勢制御装置、昇降装置、搬送装置、移動装置、調節装置、調整装置、誘導装置、または関節装置。
- 請求項1から4に記載のアクチュエータ素子、または請求項5に記載のアクチュエータ素子の製造方法で製造されたアクチュエータ素子を押圧部に用いた押圧装置。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002274929 | 2002-09-20 | ||
| JP2002274929 | 2002-09-20 | ||
| PCT/JP2003/011959 WO2004026758A1 (ja) | 2002-09-20 | 2003-09-19 | 駆動体及びその製造方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2004026758A1 JPWO2004026758A1 (ja) | 2006-01-12 |
| JP4575774B2 true JP4575774B2 (ja) | 2010-11-04 |
Family
ID=32025017
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004537991A Expired - Fee Related JP4575774B2 (ja) | 2002-09-20 | 2003-09-19 | 駆動体及びその製造方法 |
Country Status (3)
| Country | Link |
|---|---|
| JP (1) | JP4575774B2 (ja) |
| AU (1) | AU2003264504A1 (ja) |
| WO (1) | WO2004026758A1 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4661110B2 (ja) * | 2004-07-07 | 2011-03-30 | ダイキン工業株式会社 | 高分子アクチュエータ |
| JP5281322B2 (ja) * | 2007-06-21 | 2013-09-04 | パナソニック株式会社 | 電気的伸縮機構及びアクチュエータ |
| WO2013122047A1 (ja) * | 2012-02-14 | 2013-08-22 | 国立大学法人信州大学 | ゲルアクチュエータ及びその製造方法 |
| JP2016140407A (ja) * | 2015-01-30 | 2016-08-08 | 国立研究開発法人産業技術総合研究所 | カテーテルシステム |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06284750A (ja) * | 1993-03-29 | 1994-10-07 | Nippondenso Co Ltd | 積層静電アクチュエータ |
| JPH0779026A (ja) * | 1993-06-30 | 1995-03-20 | Tokin Corp | 圧電アクチュエータ及びその製造方法 |
| JPH0775356A (ja) * | 1993-09-02 | 1995-03-17 | Olympus Optical Co Ltd | メカノケミカルアクチュエータ |
| JPH07135345A (ja) * | 1993-11-09 | 1995-05-23 | Casio Comput Co Ltd | 圧電素子 |
| JP3685510B2 (ja) * | 1994-11-10 | 2005-08-17 | テルモ株式会社 | 電気伝導路を有する体内挿入具およびその製造方法 |
| JPH08216876A (ja) * | 1995-02-14 | 1996-08-27 | Nippondenso Co Ltd | 管内移動装置 |
| JPH10258022A (ja) * | 1997-01-20 | 1998-09-29 | Suzuki Motor Corp | ハイブリッドオペレーションシステム |
| US6013024A (en) * | 1997-01-20 | 2000-01-11 | Suzuki Motor Corporation | Hybrid operation system |
| JP3776571B2 (ja) * | 1997-09-18 | 2006-05-17 | 株式会社東芝 | 機能素子 |
| JP3030361B2 (ja) * | 1998-03-30 | 2000-04-10 | 工業技術院長 | 高分子電解質アンモニウム誘導体 |
| JP2961125B2 (ja) * | 1998-02-20 | 1999-10-12 | 工業技術院長 | 高分子アクチュエータの製造方法 |
| ES2293710T3 (es) * | 1998-02-20 | 2008-03-16 | National Institute Of Advanced Industrial Science And Technology | Accionadores polimericos y procedimientos para producirlos. |
| JP2000133854A (ja) * | 1998-10-27 | 2000-05-12 | Matsushita Electric Works Ltd | アクチュエータ |
| DE10054247C2 (de) * | 2000-11-02 | 2002-10-24 | Danfoss As | Betätigungselement und Verfahren zu seiner Herstellung |
| JP3886373B2 (ja) * | 2001-12-18 | 2007-02-28 | 旭硝子エンジニアリング株式会社 | 高分子浸透膜組立体 |
| JP2003266392A (ja) * | 2002-03-15 | 2003-09-24 | Rigaku Corp | 磁界に応答する流体を用いた運動装置 |
-
2003
- 2003-09-19 AU AU2003264504A patent/AU2003264504A1/en not_active Abandoned
- 2003-09-19 JP JP2004537991A patent/JP4575774B2/ja not_active Expired - Fee Related
- 2003-09-19 WO PCT/JP2003/011959 patent/WO2004026758A1/ja not_active Ceased
Also Published As
| Publication number | Publication date |
|---|---|
| WO2004026758A1 (ja) | 2004-04-01 |
| AU2003264504A1 (en) | 2004-04-08 |
| JPWO2004026758A1 (ja) | 2006-01-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7169822B2 (en) | Polymeric actuator | |
| CN106963494B (zh) | 手术机器人用蛇形关节、手术器械及内窥镜 | |
| US20090082723A1 (en) | Medical devices and methods for their fabrication and use | |
| JP2000504951A (ja) | ソフトアクチュエータと人工筋肉 | |
| JP3030361B2 (ja) | 高分子電解質アンモニウム誘導体 | |
| JP2961125B2 (ja) | 高分子アクチュエータの製造方法 | |
| JP2000233027A (ja) | 能動細管及びその製造方法 | |
| JP2017024117A (ja) | 螺旋変形可能なソフトデバイス、及びこれを用いたロボットシステム | |
| JPH04134184A (ja) | 熱操作によるアクチュエータ | |
| JP4646530B2 (ja) | アクチュエータ素子及び駆動方法 | |
| JP4575774B2 (ja) | 駆動体及びその製造方法 | |
| JPH0810336A (ja) | 医療用チューブ | |
| JP3646166B2 (ja) | アクチュエータ素子の製造方法 | |
| JP4154474B2 (ja) | アクチュエータ素子の製造方法 | |
| JP2004330354A (ja) | 3次元マイクロマニピュレータ | |
| JP2005039995A (ja) | 可撓性素子及びその用途 | |
| JPH11169394A (ja) | 金属電極を表面に有する人工筋肉体 | |
| JP4551673B2 (ja) | イオン交換樹脂成型品及びこれを用いたアクチュエータ素子 | |
| CN220216830U (zh) | 一种往复旋转机构及摆动钻 | |
| WO2005001406A1 (ja) | 可撓性素子 | |
| JP4288324B2 (ja) | 高分子電解質構造体への導電性金属パターン形成方法を利用して得られたアクチュエーター素子 | |
| JP2005033991A (ja) | 高分子アクチュエータ素子 | |
| JP2016055078A (ja) | 駆動装置およびその駆動方法 | |
| JPH06133921A (ja) | 可撓管の湾曲機構とそのアクチュエータ製造方法 | |
| WO2004079887A1 (ja) | イオン交換樹脂成形品 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20060227 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20060228 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060327 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060327 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060602 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060327 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090825 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20091020 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20091020 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20100303 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100531 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20100604 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100806 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100820 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130827 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |