JP4570823B2 - 弾性脚自動装着装置 - Google Patents
弾性脚自動装着装置 Download PDFInfo
- Publication number
- JP4570823B2 JP4570823B2 JP2001259053A JP2001259053A JP4570823B2 JP 4570823 B2 JP4570823 B2 JP 4570823B2 JP 2001259053 A JP2001259053 A JP 2001259053A JP 2001259053 A JP2001259053 A JP 2001259053A JP 4570823 B2 JP4570823 B2 JP 4570823B2
- Authority
- JP
- Japan
- Prior art keywords
- leg
- elastic
- elastic leg
- mounting
- cylinder
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images





Landscapes
- Automatic Assembly (AREA)
Description
【発明の属する技術分野】
本発明は電子機器等の筐体底面に弾性脚を装着する弾性脚自動装着装置に関する。
【0002】
【従来の技術】
従来電話機などの電子機器には、机上に載置した場合、安定して定置できるよう筐体の底面に、ゴムなどの弾性材料により形成されたゴム足と称する弾性脚が複数個所装着されている。
【0003】
また従来の弾性脚は、筐体の貼着面側が大径となった裁頭円錐状に形成されていて、台紙に貼付された状態で組み立て工程へ搬入され、組み立て作業者は、弾性脚を1個ずつ台紙より剥離して筐体底面の所定位置に貼り付けることにより、筐体に対し弾性脚を装着している。
【0004】
【発明が解決しようとする課題】
しかし従来の組み立て作業者が弾性脚を台紙より1個ずつ剥離して筐体の底面へ貼り付ける方法では、作業能率が悪いと共に、装着位置にバラツキが発生するため、装着位置精度が悪い上、机上等に載置した場合安定しないなどの問題がある。
【0005】
本発明はかかる問題点を改善するためになされたもので、弾性脚を自動的に電子機器等の筐体底面に装着する弾性脚自動装着装置を提供して、作業能率及び装着位置精度の向上を図ることを目的とするものである。
【0006】
前記目的を達成するため本発明の弾性脚自動装着装置は、弾性脚群が整列して貼付された台紙より弾性脚を剥離し、剥離した弾性脚を電子機器等の筐体底面に装着する弾性脚自動装着装置であって、前記弾性脚を把持するチャック手段と、前記チャック手段が把持した弾性脚を吸着保持する吸着手段と、前記吸着手段およびチャック手段を上下動する脚剥離シリンダと、前記吸着手段を上下動する脚装着シリンダとを有する脚装着ユニットと、前記脚装着ユニットをX軸及びX軸と直交するY軸方向へ駆動する駆動ユニットと、前記駆動ユニットを制御する制御手段とを具備し、前記チャック手段を、複数の爪体と前記爪体先端の把持部を開閉するカム手段とから構成し、前記爪体の把持部間に、弾性脚の外形より若干大径な内径で形成され、外周面に前記爪体の把持部が干渉しないようにスリットが形成され、前記弾性局の周囲を押さえつける押さえ部材を、上下動自在に設け、前記制御手段が、前記脚装着ユニットを前記弾性脚の取り出し位置に位置するよう前記駆駆動ユニットを制御して前記脚剥離シリンダを動作させて前記吸着手段およびチャック手段を上下動させるとともに前記押さえ部材を動作させて、前記チャック手段により前記弾性脚の周囲を押さえ付けた状態で前記弾性脚を把持することで前記弾性脚を剥離させた後、前記チャック手段による把持を開放し、前記筐体の装着位置に位置決めするよう前記駆動ユニットを制御して前記脚装着シリンダを動作させて前記吸着手段を上下動させることで前記弾性脚を筐体底面に装着するように制御する構成したものである。
【0007】
前記構成により、複数の弾性脚を筐体の底面に自動的に装着することができるため、従来の作業者が手作業で装着していたときに比べて、作業能率が格段に向上すると共に、弾性脚の装着位置にバラツキが生じることがないので、電子機器を机上等へ載置した場合に安定する上、見栄えも向上する。
【0009】
前記構成により、脚装着ユニットが弾性脚を取り出す際、取り出しミスが発生することがないので、信頼性が向上すると共に、台紙より剥離した弾性脚をそのまま筐体底面に貼り付けることができるため、弾性脚の装着作業が能率よく行える。
【0011】
前記構成により、チャック手段が台紙より剥離した弾性脚を吸着手段が吸着保持するため、チャック手段が弾性脚を解放しても、弾性脚が脱落することがないと共に、脚装着シリンダにより吸着手段のみを上下動することにより、筐体底面に弾性脚を装着することができるため、脚装着手段の構造を簡素化することができる。
【0013】
前記構成により、弾性脚の大きさや形状などが変わっても、爪体の数や配置を変えるだけで対応することができるため、汎用性も高い。
【0015】
前記構成により、爪体が台紙より弾性脚を剥離する際、台紙が持ち上がることがないため、弾性脚の剥離作業が確実に行える。
【0016】
【発明の実施の形態】
本発明の実施の形態を図面を参照して詳述する。
【0017】
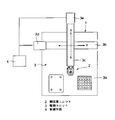
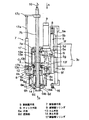
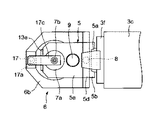
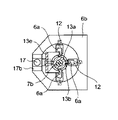
図1は弾性脚自動装着装置の平面図、図2は脚装着ユニットの断面図、図3は図2のA方向からの矢視図、図4は図2のB方向からの矢視図、図5は図2のC−C線に沿う断面図、図6の(イ)ないし(ニ)は作用説明図である。
【0018】
脚自動装着装置の本体1は、図1に示すように脚装着ユニット2と、脚装着ユニット2をX−Y方向へ駆動する駆動ユニット3及び駆動ユニット3を制御する制御手段4より構成されている。
【0019】
駆動ユニット3は、XYテーブル3aと、このXYテーブル3a上をY軸方向へ移動自在なY軸キャリッジ3bと、Y軸キャリッジ3bに搭載され、かつY軸キャリッジ3b上を、Y軸と直交するX軸方向へ移動自在なX軸キャリッジ3cより構成されており、制御手段4により制御されるY軸モータ3d及びX軸モータ3eがそれぞれ設けられている。
【0020】
脚装着ユニット2はX軸キャリッジ3cの先端部に装着されていて、図2ないし図6に示すように構成されている。
【0021】
すなわち脚装着ユニット2は、脚剥離手段5と、チャック手段6及び脚装着手段7よりなり、脚剥離手段5は、後述する弾性脚18を台紙19より剥離するもので、X軸キャリッジ3cの先端に設けられた基板3fの上下方向にガイドレール5aが取付けられていて、このガイドレール5aに上部スライドブロック5bと、下部スライドブロック5cが上下に離間し、かつ上下方向に摺動自在に支承されている。
【0022】
上部スライドブロック5bには、圧縮ばねよりなる第1付勢手段8により下方へ付勢された上部スライドプレート5dを介して上部支持部材5eが取付けられており、上部スライドプレート5dはガイドレール5aに固着されたストッパ5iにより下降位置に停止されている。
【0023】
上部支持部材5eには、ピストン杆9aを下向きにして、脚剥離シリンダ9がほぼ垂直に取付けられており、ピストン杆9aの先端は、下部スライドブロック5cに取付けられた下部スライドプレート5f上部に固着されたブラケット5gに接続されていて、脚剥離シリンダ9によりスライドプレート5fを上下動できるようになっており、上部支持部材5eの先端側には、脚装着手段7のガイドブッシュ7aが固着されている。
【0024】
脚装着手段7は、ガイドブッシュ7aに上下摺動自在に支承されたノズル管7bよりなる吸着手段を有していて、ノズル管7bの上端は可撓管10に介して図示しない真空吸着手段に接続されており、ノズル管7bの下端はチャック手段6の中心部を貫通してチャック手段6の爪体6a付近に達していると共に、ノズル管7bの上端側に固着されたジョイントアーム17cの先端に、脚装着シリンダ17のピストン杆17a先端が接続され、脚装着シリンダ17の下端は、ブラケット17bを介して下部支持部材6bの上面に固着されている。
【0025】
チャック手段6は、複数の爪体6aにより弾性脚18の外周面を把持するもので、下部スライドプレート5fの下端側に取付けられた下部支持部材6bを有しており、この下部支持部材6b固着されたチャックホルダ6gに、各爪体6aの中間部よりやや上側がピン6cにより回動自在に枢着されている。
【0026】
爪体6aは円周方向に等間隔に配置された例えば4本より構成されていて、先端部に内側に屈曲された把持部6dを有しており、下部支持材6b内に設けられた圧縮ばね12により把持部6dが拡開する方向に付勢されており、爪体6aの上端部に、ピン13cにより回転自在に支承されたカムフォロア13bが後述するカム筒13aの直筒部外周面に当接することにより、把持部6dが必要以上に拡開するのを規制している。
【0027】
また各爪体6aの上端部には、爪体6aを開閉するカム手段13が設けられている。
【0028】
カム手段13は、ノズル管7bの外周に上下摺動自在に嵌装されたカム筒13aと、このカム筒13aの直筒部外周面に当接する複数のカムフォロア13bよりなり、各カムフォロア13bはピン13cにより各爪体6aの上端部に回転自在に支承されている。
【0029】
カム筒13aは上端にフランジ13dが突設されていて、このフランジ13dの上面が上部支持部材5eの下面に当接されることにより上昇位置に停止され、フランジ13dの下面が、上部支持部材5e取付けられたカムストッパ13eの下端に当接されることにより、下降位置に停止されるようになっていると共に、カム筒13aの下端部外周にテーパ状のカム13fが突設されていて、このカム13fによりカムフォロア13bが押し広げられることにより、各爪体6aの把持部6dが弾性脚18の外周面を把持できるようになっている。
【0030】
ストッパ筒6eは、下部支持部材6bの下面に取付けられ、各爪体6aが作動する際に該各爪体6aが干渉しないよう爪体6aと同じ配置で十字溝6hが形成されていると共に、このストッパ筒6eの内底部には、押え部材14が設けられていて、この押え部材14の上面とチャックホルダ6gの下面間に、前記第1付勢手段8よりばね力の小さい圧縮ばねよりなる第2付勢手段15が設けられていて、押え部材14を下方へ付勢している。
【0031】
押え部材14は、台紙19より弾性脚18を剥離する際、弾性脚18とともに台紙18が持ち上がるのを防止するもので、弾性脚18の外径より若干大径な内径で形成されていて、上端部に突設された鍔部14aがストッパ筒の内底面に係止されており、外周面には、爪体6aの把持部が干渉しないよう爪体6aと同じ配置でスリット14bが形成されている。
【0032】
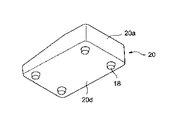
一方弾性脚18を底面20dに装着する電子機器20は、例えば図7及び図8に示すような卓上電話機であって、筐体20aの上面にハンドセット20bと、各種キー20cが設けられ、筐体20aの底面20dの例えば4箇所に弾性脚18が装着されている。
【0033】
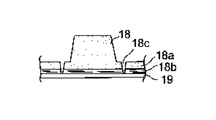
また筐体20aの底面20dに装着する弾性脚18は図9ないし図11に示すように、多数の弾性脚18が縦横に等間隔に突設された弾性シート18aにより形成されていて、剥離自在な接着層18bを介して台紙19に貼着されており、弾性シート18aの四隅には、XYテーブル3aの弾性脚セット位置に設けられた図示しない位置決めピンに嵌挿する位置決め孔18dが、台紙19を貫通するように穿設されており、弾性脚18の周囲には、接着層18bに達する切り溝18cが環状に形成されている。
【0034】
次に前記構成された弾性脚自動装着装置の作用を図6の(イ)ないし(ニ)を参照して説明する。
【0035】
電子機器20の筐体20a底面20dに弾性脚18を装着するに当って、まず電子機器20の筐体20aを、底面20dを上向きにしてXYテーブル3aの所定位置に図1に示すようにセットし、また弾性脚18の設けられた弾性シート18aをXYテーブル3aの所定位置に位置決めする。
【0036】
この状態で運転を開始すると、制御手段4により駆動ユニット3が制御されて、駆動ユニット3のX軸キャリッジ3bに取付けられた脚装着ユニット2が弾性シート18aの上方へ移動され、はじめに剥離する弾性脚18の中心に、脚装着ユニット2を構成する脚装着手段7のノズル管7bの中心が図6の(イ)に示すように位置決めされる。
【0037】
次にこの状態で脚剥離シリンダ9により、下部スライドプレート5cとともに下部支持部材6bが下降されるため、下部支持部材6bに設けられたチャック手段6も下降される。
【0038】
そして下部スライドプレート5fの下端がガイドレール5aの下端部に設けられたストローク調整ねじ16に当接して停止されると、図6の(ロ)に示すように、チャック手段6の各爪体6a先端が弾性シート18aの上面に達して、把持部6dの先端が弾性脚18の周囲に設けられた切り溝18cの外周を囲むと共に、押え部材14が第2付勢手段15に抗して押し上げられ、またノズル管7bの下端面が弾性脚18の上面に密着された状態で、脚剥離シリンダ9と同時に動作された真空吸着手段によりノズル管7b内の空気が吸引されるため、ノズル管7bの下端面に弾性脚18の上面が吸着される。
【0039】
次にこの状態からさらに脚剥離シリンダ9が伸長すると、下部支持部材6bはストローク調整ねじ16によりすでに下降位置に停止されているため、上部支持部材5eが第1付勢手段8に抗して上昇し、これによって図6の(ハ)に示すようにカムストッパ13eにより円筒カム13aが引き上げられて、円筒カム13a下端に形成されたカム13fによりカムフォロア13bを介して爪体6aの上端側が拡開され、各爪体6aの下端に形成された把持部6dが弾性脚18の外周面を把持する。
【0040】
以上のようにして爪体6aが弾性脚18の把持を完了すると、脚剥離シリンダ9が収縮を開始するため、上部スライドプレート5dがストッパ5iに当接するまで上部支持部材5eが下降され、さらに脚剥離シリンダ9が収縮すると、下部支持部材6bが上昇を開始するため、第2付勢手段15により付勢された押え部材14が弾性脚18の周囲を押え付けた状態で各爪体6aが上昇され、これによって図6の(ニ)に示すように台紙19より弾性脚18が剥離される。
【0041】
その後円筒カム13aの上端が上部支持部材5eの下面に当接すると、円筒カム13aはその位置に停止された状態で、下部支持部材6bともにチャック手段6がさらに上昇されるため、各爪体6aの上端に設けられたカムフォロア13bが円筒カム13aの直筒部に達して、圧縮ばね12の作用で各爪体6aの上端側が閉合されて、把持部6dが弾性脚18を解放するが、弾性脚18はノズル管7bの下端に吸着されているため、落下することがない。
【0042】
以上のようにして弾性脚18の剥離が完了すると、駆動ユニット3により脚装着ユニット2が電子機器20の筐体20a上方へ移動されて、はじめに弾性脚18を装着する位置へ位置決めされる。
【0043】
そしてこの状態で脚装着シリンダ17が収縮することによりノズル管7bが下降されて、ノズル管7bの下端に吸着された弾性脚18の接着面が筐体20a底面に押し付けられ、接着層18bにより筐体20aの所定位置に弾性脚18が貼着される。
【0044】
弾性脚18の貼着が完了すると、真空吸着手段による吸引が停止されると同時に、脚装着シリンダ17が伸長を開始して、ノズル管7bを元の位置まで上昇させる。
【0045】
以下前記動作を繰返して、XYテーブル3a上にセットされた電子機器20の筐体底面20dに所定数、例えば4個の弾性脚18を装着するもので、全ての弾性脚18の装着が完了したら、電子機器20を搬出した後、新たな電子機器20を搬入して、上述した弾性脚18の装着動作を繰返すもので、弾性脚18を自動的に筐体20aの底面に20dに装着できるため、従来の作業員が手で装着していた場合に比べて作業能率が格段に向上すると共に、装着位置にバラツキが発生することが少ないので、装着位置精度も向上する。
【0046】
なお装着する電子機器20の種類によって弾性脚18の高さが異なる場合があるが、ガイドレール5aの下端部に設けたストローク調整ねじ16により下部支持部材6bの下降停止位置を調整することにより、各爪体6aの把持部6dで常に弾性脚18の中間部付近を把持することができるため、弾性脚18の高さが変っても剥離に失敗することがない。
【0047】
また弾性脚18が角形やその他の形状に変っても、これら形状に合せて爪体6aの数や配置を変えることにより、どんな形状の弾性脚18にも対応することができる。
【0048】
さらに前記実施の形態では、弾性脚18を接着剤により筐体20aの底面に貼着するようにしたが、弾性脚18の取付け面に突起を突設して、この突起を筐体20aの底面に開口した取付け孔に圧入することにより、筐体20aに対して弾性脚18を取付ける装着方法にも適用できるものである。
【0049】
【発明の効果】
本発明は以上詳述したように、整列された弾性脚群より弾性脚を取り出し、かつ筐体の底面に装着する脚装着ユニットと、脚装着ユニットをX軸及びX軸と直交するY軸方向へ駆動する駆動ユニットと、脚装着ユニットを弾性脚の取り出し位置及び筐体の装着位置に位置決めするよう駆動ユニットを制御する制御手段とから構成したことから、複数の弾性脚を筐体の底面に自動的に装着することができるため、従来の作業者が手作業で装着していたときに比べて、作業能率が格段に向上すると共に、弾性脚の装着位置にバラツキが生じることがないので、電子機器を机上等へ載置した場合に安定する上、見栄えも向上する。
【0050】
また、脚装着ユニットに、弾性脚を台紙より剥離する脚剥離手段と、剥離した弾性脚を筐体底面に貼り付ける脚装着手段を設けたことから、脚装着ユニットが弾性脚を取り出す際、取り出しミスが発生することがないので、信頼性が向上する上、台紙より剥離した弾性脚をそのまま筐体底面に貼り付けることができるため、弾性脚の装着作業が能率よく行える。
【0051】
さらに脚剥離手段を、弾性脚を把持するチャック手段と、チャック手段を上下動する脚剥離シリンダとから構成すると共に、脚装着手段を、チャック手段が把持した弾性脚を吸着保持する吸着手段と、吸着手段を上下動する脚装着シリンダとから構成したことから、チャック手段が台紙より剥離した弾性脚を吸着手段が吸着保持するため、チャック手段が弾性脚を解放しても、弾性脚が脱落することがないと共に、脚装着シリンダにより吸着手段のみを上下動することにより、筐体底面に弾性脚を装着することができるため、脚装着手段の構造を簡素化することができる。
【0052】
しかもチャック手段を複数の爪体と、爪体先端の把持部を開閉するカム手段とから構成したことから、弾性脚の大きさや形状などが変わっても、爪体の数や配置を変えるだけで対応することができるため、汎用性も高いと共に、爪体の把持部間に、爪体が弾性脚を台紙より剥離する際、弾性脚の周囲を押え付ける押え部材を上下動自在に設けたことから、爪体が台紙より弾性脚を剥離する際、台紙が持ち上がることがないため、弾性脚の剥離作業が確実に行える。
【図面の簡単な説明】
【図1】本発明の実施の形態になる弾性脚自動装着装置の平面図である。
【図2】本発明の実施の形態になる弾性脚自動装着装置を構成する脚装着ユニットの断面図である。
【図3】図2のA方向からの矢視図である。
【図4】図2のB方向からの矢視図である。
【図5】図2のC−C線に沿う断面図である。
【図6】(イ)ないし(ニ)は本発明の実施の形態になる弾性脚自動装着装置の作用説明図である。
【図7】本発明の実施の形態になる弾性脚自動装着装置により弾性脚を装着する電子機器の側面図である。
【図8】本発明の実施の形態になる弾性脚自動装着装置により弾性脚を装着する電子機器の底面側の斜視図である。
【図9】本発明の実施の形態になる弾性脚自動装着装置により装着する弾性脚の平面図である。
【図10】本発明の実施の形態になる弾性脚自動装着装置により装着する弾性脚の側面図である。
【図11】図9のD−D線に沿う断面図である。
【符号の説明】
2 脚装着ユニット
3 駆動ユニット
4 制御手段
5 脚剥離手段
6 チャック手段
6a 爪体
6d 把持部
7 脚装着手段
9 脚剥離シリンダ
13 カム手段
14 押え部材
17 脚装着シリンダ
18 弾性脚
19 台紙
Claims (1)
- 弾性脚群が整列して貼付された台紙より弾性脚を剥離し、剥離した弾性脚を電子機器等の筐体底面に装着する弾性脚自動装着装置であって、
前記弾性脚を把持するチャック手段と、
前記チャック手段が把持した弾性脚を吸着保持する吸着手段と、
前記吸着手段およびチャック手段を上下動する脚剥離シリンダと、
前記吸着手段を上下動する脚装着シリンダとを有する脚装着ユニットと、
前記脚装着ユニットをX軸及びX軸と直交するY軸方向へ駆動する駆動ユニットと、
前記駆動ユニットを制御する制御手段とを具備し、
前記チャック手段を、複数の爪体と前記爪体先端の把持部を開閉するカム手段とから構成し、
前記爪体の把持部間に、弾性脚の外形より若干大径な内径で形成され、外周面に前記爪体の把持部が干渉しないようにスリットが形成され、前記弾性脚の周囲を押さえつける押さえ部材を、上下動自在に設け、
前記制御手段は、
前記脚装着ユニットを前記弾性脚の取り出し位置に位置するよう前記駆駆動ユニットを制御して前記脚剥離シリンダを動作させて前記吸着手段およびチャック手段を上下動させるとともに前記押さえ部材を動作させて、前記チャック手段により前記弾性脚の周囲を押さえ付けた状態で前記弾性脚を把持することで前記弾性脚を剥離させた後、前記チャック手段による把持を開放し、前記筐体の装着位置に位置決めするよう前記駆動ユニットを制御して前記脚装着シリンダを動作させて前記吸着手段を上下動させることで前記弾性脚を筐体底面に装着するように制御することを特徴とする弾性脚自動装着装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2001259053A JP4570823B2 (ja) | 2001-08-29 | 2001-08-29 | 弾性脚自動装着装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2001259053A JP4570823B2 (ja) | 2001-08-29 | 2001-08-29 | 弾性脚自動装着装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2003071653A JP2003071653A (ja) | 2003-03-12 |
| JP4570823B2 true JP4570823B2 (ja) | 2010-10-27 |
Family
ID=19086483
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2001259053A Expired - Fee Related JP4570823B2 (ja) | 2001-08-29 | 2001-08-29 | 弾性脚自動装着装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4570823B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106975915A (zh) * | 2017-05-31 | 2017-07-25 | 安庆市恒瑞达汽车零部件制造有限公司 | 一种杆系件限位圈调节定位装置 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS60201834A (ja) * | 1984-03-27 | 1985-10-12 | Toshiba Corp | 多機能チヤツク |
| JPS62199388A (ja) * | 1986-02-21 | 1987-09-03 | 株式会社東芝 | ハンドリング装置 |
| JPH0235499U (ja) * | 1988-08-31 | 1990-03-07 | ||
| JPH0366527A (ja) * | 1989-08-01 | 1991-03-22 | Sony Corp | ゴムダンパーの自動取付方法と自動取付装置および吸着ヘッド |
| JPH07114684B2 (ja) * | 1990-10-29 | 1995-12-13 | 塩野義製薬株式会社 | ゼリー状小物品の移載ハンド |
-
2001
- 2001-08-29 JP JP2001259053A patent/JP4570823B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2003071653A (ja) | 2003-03-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN104203494A (zh) | 卡盘装置 | |
| EP1161129A3 (en) | Electronic-component mounting apparatus | |
| CN101300427B (zh) | 吸附装置 | |
| WO2005061188A1 (ja) | 部品装着ヘッド、吸着ノズル、及び吸着ノズルの製造方法 | |
| KR100697931B1 (ko) | 유리 기판의 반송용 로봇 | |
| JPH0745644A (ja) | チップボンデイング方法及び装置 | |
| JP4570823B2 (ja) | 弾性脚自動装着装置 | |
| KR20240168326A (ko) | 리프팅 헤드 및 리프팅 장치 | |
| JP2000301421A (ja) | 電子部品実装機における部品吸着装置及び部品吸着方法 | |
| JPH0870198A (ja) | 電子部品移載装置 | |
| JP2518163B2 (ja) | 偏平ワ―ク等の吸着式移動装置における脱着装置 | |
| CN220575955U (zh) | 一种产品取放装置 | |
| JP4573639B2 (ja) | 電子部品実装装置 | |
| JPH10598A (ja) | 金型装置およびそれを用いた部品供給装置 | |
| JP2002178287A (ja) | 電子部品搭載装置 | |
| JPH05114799A (ja) | 電子部品吸着ヘツド | |
| CN120854372B (zh) | 一种手持式晶圆真空吸笔 | |
| KR101837611B1 (ko) | 흡착 및 파지 기능이 구비된 접착시트 박리 장치 | |
| KR200483147Y1 (ko) | 타겟 부품 고정 기능을 구비한 작업 테이블, 접착제 도포 장치 | |
| JP2501102B2 (ja) | チツプ状電子部品の装着ヘツド | |
| JP3239908B2 (ja) | 部品供給装置 | |
| JP2002187084A (ja) | 平部材移送装置及びその使用方法 | |
| JP2551780B2 (ja) | 部品吸着装置 | |
| JP2000232300A (ja) | プリント配線基板の位置決め固定装置及び位置決め固定方法 | |
| JPS6048280A (ja) | 電子部品塔載装置に於けるチヤツク |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080324 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20091013 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20091104 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20091218 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20100125 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100525 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100715 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100810 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100811 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130820 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |