JP4468523B2 - 超音波プローブ駆動装置 - Google Patents
超音波プローブ駆動装置 Download PDFInfo
- Publication number
- JP4468523B2 JP4468523B2 JP31565199A JP31565199A JP4468523B2 JP 4468523 B2 JP4468523 B2 JP 4468523B2 JP 31565199 A JP31565199 A JP 31565199A JP 31565199 A JP31565199 A JP 31565199A JP 4468523 B2 JP4468523 B2 JP 4468523B2
- Authority
- JP
- Japan
- Prior art keywords
- radial
- ultrasonic probe
- drive unit
- linear
- driving
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
- 239000000523 sample Substances 0.000 title claims description 104
- 230000005540 biological transmission Effects 0.000 claims description 27
- 238000003780 insertion Methods 0.000 claims description 9
- 230000037431 insertion Effects 0.000 claims description 9
- 239000000758 substrate Substances 0.000 description 12
- WABPQHHGFIMREM-UHFFFAOYSA-N lead(0) Chemical compound [Pb] WABPQHHGFIMREM-UHFFFAOYSA-N 0.000 description 4
- 238000010586 diagram Methods 0.000 description 3
- 230000000694 effects Effects 0.000 description 2
- 238000010276 construction Methods 0.000 description 1
- 239000002023 wood Substances 0.000 description 1
Images







Landscapes
- Ultra Sonic Daignosis Equipment (AREA)
Description
【発明の属する技術分野】
本発明は超音波プローブの回転及び進退動を行う超音波プローブ駆動装置に関する。
【0002】
【従来の技術】
従来、特開平8−56947号公報では、体腔内へ挿入される挿入部の先端に、超音波振動子を回転及び挿入軸方向に進退駆動させて超音波三次元画像の構築を可能にした三次元走査用超音波プローブが記載されている。
【0003】
このような三次元走査用超音波プローブを駆動する超音波プローブ駆動装置(特開平8−56947号公報の駆動ユニット)においては、超音波を送受信する超音波振動子を内蔵した先端部及びこの先端部を一端側に設けた可撓性シャフトから成る超音波プローブが着脱自在であり、この超音波プローブの可撓性シャフトを回転させることにより前記超音波振動子を回転させてラジアル走査を行い、前記超音波プローブ全体を挿入軸方向に進退動させることにより前記超音波振動子を進退動させてリニア走査を行っている。このような超音波プローブ駆動装置では、ラジアル駆動ユニットとリニア駆動ユニットとを設けている。ラジアル駆動ユニットは、前記ラジアル走査の駆動のための動力を発生するラジアル駆動用モータと、前記超音波プローブを着脱自在に接続する超音波プローブ接続機構と、前記ラジアル駆動用モータの動力を前記超音波プローブの可撓性シャフトに伝達するラジアル駆動力伝達機構とから成っている。リニア駆動ユニットは、前記リニア走査の駆動のための動力を発生するリニア駆動用モータと、前記ラジアル駆動ユニットを進退可能な状態で取り付けるリニア移動ガイドと、前記リニア駆動用モータの動力をリニア移動ガイドに伝達するリニア駆動力伝達機構とから成っている。
【0004】
ここで、特開平8−56947号公報の駆動ユニットでは、ラジアル駆動ユニットとリニア駆動用モータを直列に配置している。
【0005】
また、超音波プローブ駆動装置では、ラジアル駆動ユニットと制御基板とを、ラジアル駆動ユニットの外側に配置されたリード線によって接続しているものがある。また、超音波振動子から伝達される電気信号を増幅するヘッドアンプがラジアル駆動用モータの外側にモータの回転軸に平行に配置されたものがある。
【0006】
【発明が解決しようとする課題】
特開平8−56947号公報の駆動ユニットでは、ラジアル駆動ユニットとリニア駆動用モータを直列に配置しているので、装置の全長が長くなってしまい、小型化の妨げとなっている。
【0007】
また、ラジアル駆動ユニットと制御基板とを、ラジアル駆動ユニットの外側に配置されたリード線によって接続した超音波プローブ駆動装置では、前記リード線により前面投影面積を増やしてしまい、装置の小型化の妨げとなっていた。
【0008】
また、ヘッドアンプをラジアル駆動モータの外側の回転軸に平行に配置している場合、前記ヘッドアンプにより前面投影面積を増やしてしまい、装置の小型化の妨げとなる。
【0009】
そこで本発明は、超音波プローブに対してラジアル走査とリニア走査の駆動を同時に行うことにより3次元駆動可能で、かつ小型であつかいやすい超音波プローブ駆動装置を提供することを目的とする。
【0010】
【課題を解決するための手段】
本発明の超音波プローブ駆動装置は、超音波を送受信する超音波振動子を内蔵した先端部及びこの先端部を一端側に設けた可撓性シャフトから成る超音波プローブが着脱自在であり、この超音波プローブの可撓性シャフトを回転させることにより前記超音波振動子を回転させてラジアル走査を行い、前記超音波プローブ全体を挿入軸方向に進退動させることにより前記超音波振動子を進退動させてリニア走査を行う超音波プローブ駆動装置において、前記ラジアル走査の駆動のための動力を発生するラジアル駆動用モータ、前記超音波プローブを着脱自在に接続する超音波プローブ接続機構及び前記ラジアル駆動用モータの動力を前記超音波プローブの可撓性シャフトに伝達するラジアル駆動力伝達機構を含むラジアル駆動ユニットと、前記リニア走査の駆動のための動力を発生するリニア駆動用モータ、前記ラジアル駆動ユニットを進退可能な状態で取り付けるリニア移動ガイド及び前記リニア駆動用モータの動力をリニア移動ガイドに伝達するリニア駆動力伝達機構を含むリニア駆動ユニットと、外部からの接続コードが接続されると共に、前記リニア駆動ユニットに直列に配置され、前記ラジアル駆動ユニット及び前記リニア駆動ユニットに電気的に接続されて前記ラジアル走査を制御する制御基板と、を備え、相互に直列に配置される前記リニア駆動用モータと前記制御基板との配置領域は、前記ラジアル駆動ユニットの進退方向に並列で且つ進退範囲に対応した領域であり、前記制御基板に対して移動する前記ラジアル駆動ユニットと前記制御基板とは平坦で湾曲自在な部材により電気的に接続されており、前記平坦で湾曲自在な部材は前記ラジアル駆動ユニットの進退に必要なスペースに前記ラジアル駆動ユニットの前面投影面内で湾曲して配置されることを特徴とする。
【0011】
この構成によれば、前記リニア駆動用モータは前記ラジアル駆動ユニットのリニア移動範囲内であり、かつ前記ラジアル駆動ユニットと並列の位置に配置されるので、装置の全長を短縮でき、超音波プローブに対してラジアル走査とリニア走査の駆動を同時に行うことにより3次元駆動可能で、かつ小型であつかいやすい超音波プローブ駆動装置を提供することができる。
【0012】
【発明の実施の形態】
以下、本発明の実施の形態を図面を参照して説明する。
【0013】
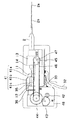
図1ないし図5は本発明の第1の実施の形態に係り、図1は超音波プローブ駆動装置の内部構造を示す右側方から見た断面図、図2は超音波プローブ駆動装置の内部構造を示す上側から見た断面図、図3は超音波プローブ駆動装置の内部構造を示す左側から見た断面図、図4は超音波プローブ駆動装置の内部構造を示す正面から見た断面図、図5は超音波プローブ駆動装置を用いた超音波診断装置の概略構成を説明する説明図である。
【0014】
まず、図5を用いて超音波診断装置の概略構成を説明する。
【0015】
図5において、本発明の超音波プローブ駆動装置を用いた超音波診断装置1は、それぞれ着脱自在な超音波プローブ2、アウターシース3を備え、これら超音波プローブ2、アウターシース3を組み付けて構成される体腔内プローブ4と、この体腔内プローブ4の基端部が着脱自在に接続され、後述する超音波振動子を挿入軸方向に対して回転駆動させたり、或いは回転及び進退駆動させる駆動手段を備えた超音波プローブ駆動装置5と、超音波信号を制御する観測装置6と、前記超音波プローブ駆動装置5の駆動制御部及び画像処理部を有する画像処理装置7と、この画像処理装置7から出力される映像信号を基に超音波画像を表示するモニタ8とで主に構成される。
【0016】
アウターシース3は、挿入部3aと接続部3bを有し、超音波プローブ2と同様に接続部3bによって超音波プローブ駆動装置5に着脱自在になっている。
【0017】
前記超音波プローブ駆動装置5は、支持アーム9の端部に固定されている。この超音波プローブ駆動装置からは基端部が二股に分かれる信号ケーブル5aが延出しており、この信号ケーブル5aの端部にはそれぞれ前記観測装置6に電気的に接続される観測装置用コネクタ5bと前記画像処理装置7に電気的に接続される画像処理装置用コネクタ5cとが設けられている。そして、前記観測装置6、前記画像処理装置7、前記モニタ8、前記支持アーム9はカート10に載置されている。
【0018】
なお、前記観測装置6と前記画像処理装置7との間及び前記画像処理装置7とモニタ8の間は、背面パネルの図示しない信号ケーブルを介してそれぞれ電気的に接続されている。
【0019】
次に、図1乃至図4を用いて超音波プローブ駆動装置5について詳細に説明する。
【0020】
図1において、超音波プローブ駆動装置5は、超音波を送受信する超音波振動子を内蔵した先端部2a及びこの先端部2aを一端側に設けた可撓性シャフト2bから成る超音波プローブが着脱自在であり、この超音波プローブ2の可撓性シャフト2bを回転させることにより前記超音波振動子を回転させてラジアル走査を行い、前記超音波プローブ2全体を挿入軸方向に進退動させることにより前記超音波振動子を進退動させてリニア走査を行うようになっている。
【0021】
超音波プローブ駆動装置5は、前記ラジアル走査の駆動のための動力を発生するラジアル駆動用モータ11、前記超音波プローブ2を着脱自在に接続する超音波プローブ接続機構(コネクタ13)及び前記ラジアル駆動用モータ11の動力を前記超音波プローブ2の可撓性シャフトに伝達するラジアル駆動力伝達機構12を含むラジアル駆動ユニット10と、前記リニア走査の駆動のための動力を発生するリニア駆動用モータ22、前記ラジアル駆動ユニット10を進退可能な状態で取り付けるリニア移動ガイド21及び前記リニア駆動用モータ22の動力をラジアル駆動ユニット10に伝達するリニア駆動力伝達機構23を含むリニア駆動ユニット20と、を備え、前記リニア駆動用モータ22は前記ラジアル駆動ユニット10のリニア移動範囲内でありかつ前記ラジアル駆動ユニット10と並列の位置に配置している。
【0022】
超音波プローブ2は、可撓性シャフト2bの一端側に先端部2aを設け、可撓性シャフト2bの他端側にコネクタ部2cを設けている。コネクタ部2cは、ラジアル駆動ユニット10のコネクタ部13と着脱自在な状態で接続するようになっている。これにより、ラジアル駆動ユニット10は、超音波プローブ2を着脱自在に保持し、超音波プローブ2の先端部2aに内蔵された超音波振動子を回転させことによりラジアル走査を行う。
【0023】
ラジアル地板14は、ラジアル駆動用モータ11とラジアル駆動力伝達機構12と図2に示すスリップリングエンコーダ41とコネクタ13を支持している。
【0024】
ラジアル駆動ユニット10はリニア移動ガイド21によって案内され、進退可能である。この進退動作をリニア駆動(リニア走査の駆動)という。リニア駆動時には、ラジアル駆動ユニット10と超音波プローブ2とが一体的に移動する。
【0025】
以下、ラジアル駆動ユニット10について詳細に説明する。
【0026】
ラジアル駆動ユニット10はリニア駆動ユニット20のリニア移動ガイド21によって進退する。ラジアル駆動用モータ11はラジアル駆動(ラジアル走査の駆動)の動力源である。
【0027】
ラジアル駆動力伝達機構12は、適当な回転速度比を持ち、ラジアル駆動用モータ11の回転を超音波プローブ2の回転に適した速度、駆動トルクに変換して図2に示すスリップリングエンコーダ41に伝達する。具体的な構成はギアやベルトやシャフトなどによる伝達機構が考えられるが、目的を達成できるのならどのような構成でも構わない。
【0028】
次に各種基板について詳細に説明する。
【0029】
制御基板31は、前記超音波振動子や図2のエンコーダ部41bなどの情報を処理したり、図5の観測装置6と情報をやり取りする役目があり、リニア移動ガイド21と略平行かつリニア駆動用モータ22と直列の位置に配置されている。この場合、制御基板31は図5の観測装置6へとつながる接続コード32や、リニア駆動用モータ22との接続コード33が接続されている。
【0030】
ヘッドアンプ基板34は、フレキシブル基板であり、ヘッドアンプ部34aと、制御基板31に対する接続部34bとで構成されている。
【0031】
ヘッドアンプ部34aは、ラジアル駆動力伝達機構12のラジアル駆動用モータ11と向かい合う側に取り付けられ、ラジアル駆動用モータ11との接続コード35や図2のスリップリングエンコーダ41との接続コード36が接続される。
【0032】
制御基板31との接続部34bは図4に示すラジアル駆動ユニット10の前面投影面積内に配設され、制御基板31へ接続される。従つてラジアル駆動ユニット10との観測装置6とは、ヘッドアンプ基板34と制御基板31を通して導通される。
【0033】
図2及び図3において、スリップリングエンコーダ41は、超音波プローブ2の可撓性シャフト2bに中心軸41aが接続されており、可撓性シャフト2bから伝達された回転駆動力により中心軸41aを回転させる。これにより、中心軸41aの回転に同期してエンコーダ部41bからパルス信号が発生する。このパルス信号によって、制御基板31はラジアル駆動回転数の制御を行う。スリップリング部41cは、コネクタ13との導通を確保し、電気信号の通り道ともなっている。
【0034】
このような構成により、ラジアル駆動ユニット10は超音波プローブ2を保持し超音波振動子2aを回転させるのでラジアル駆動が可能となる。
【0035】
以下、リニア駆動ユニット20について詳細に説明する。
【0036】
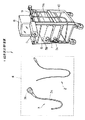
図2において、リニア地板48は、図1及び図4に示すリニア移動ガイド21とリニア駆動用モータ22とリニア駆動力伝達機構23とを支持し、リニア駆動ユニット20を構成する。リニア移動ガイド21は、図1及び図4に示すように、リニア駆動用モータ22と直列に配置される。
【0037】
図2乃至図4において、リニア駆動用モータ22は、リニア駆動の動力源であり、ピニオンギヤ42が、シャフトに固定されている。
【0038】
図2において、リニア駆動力伝達機構23は、適当な回転速度比を持ち、リニア駆動用モータ22の回転をリニア移動に適した速度、駆動トルクに変換する。本実施の形態ではギヤとベルトによる構成としたか、目的を達成できるのならどのような構成でもかまわない。
【0039】
リニア駆動力伝達機構23の内容を以下に記す。
【0040】
図3及び図4に示すように、減速ギヤ43はピニオンギヤ42に噛合し、リニア駆動用モータ22の駆動力をドライブプーリ44に伝達する。
【0041】
図2及び図3において、ドライブプーリ44とドリブンプーリ45との間に伝達ベルト46が掛けられている。
【0042】
ドライブプーリ44とドリブンプーリ45は伝達ベルト46が図1に示すリニア移動ガイド21と平行になるように配置される。
【0043】
プーリホルダ47はドリブンプーリ45を支持している。
【0044】
本実施の形態ではプーリホルダ47は、リニア地板48にビスにより固定されているが、伝達ベルト46がたるまなければよいので、ばね等によりテンションをかける構成でもよい。
【0045】
図2に示すギヤ地板49は減速ギヤ43とドライブプーリ44が外れないようにするための部材で、リニア地板48に固定されている。
【0046】
リニア駆動ユニット20は、リニア駆動用モータ22を回転させることで伝達ベルト46がリニア移動がイド21を平行に駆動する。
【0047】
次にラジアル駆動ユニット10がリニア移動する構成について説明する。
【0048】
図1において、ラジアル駆動ユニット10は、リニア移動ガイド21のステージ21aに固定されており、ステージ21aはレール21bに沿って移動する。
【0049】
図2及び図3において、ラジアル地板14は伝達ベルト46の一部と機械的に結合されている。リニア駆動用モータ22を駆動し伝達ベルト46が駆動されると、ラジアル地板14がリニア移動ガイド21に沿ってリニア移動するので、ラジアル駆動ユニット10がリニア移動することになる。
【0050】
図6乃至図8はラジアル駆動ユニット10の動作を示す説明図であり、図6はラジアル駆動ユニット10が前端にいる状態を示し、図7は中間位置を示し、図8は後端にいる状態を示している。
【0051】
図6乃至図8では、アウターシース3に超音波プローブ2を先端部2aから挿入することにより体腔内プローブ4を構成し、この状態で超音波プローブ2のコネクタ部2cをラジアル駆動ユニット10のコネクタ部13に接続している。
【0052】
リニア駆動用モータ22の第1の方向に回動すると、リニア移動ガイド21のステージ21aに取り付けたラジアル駆動ユニット10がレール21bに沿って図6の状態から図7の状態、図7の状態から図8の状態に移動する。リニア駆動用モータ22の第1の方向とは逆の第2の方向に回動すると、ラジアル駆動ユニット10がレール21bに沿って図8の状態から図7の状態、図7の状態から図6の状態に移動する。これにより超音波プローブ2を進退させ、先端部2aをアウターシース3の中で進退させることができる。このようなリニア移動中にラジアル駆動ユニット10が超音波プローブ2の先端部2aに内蔵された超音波振動子を回転させラジアル走査を行うことにより、3次元駆動が可能となる。
【0053】
このような発明の実施の形態によれば、ラジアル走査とリニア走査の駆動を同時に行うことにより3次元駆動可能であるとともに、前記リニア駆動用モータ22は前記ラジアル駆動ユニット10のリニア移動範囲内でありかつ前記ラジアル駆動ユニット10と並列の位置に配置したので、全長を短くでき、小型であつかいやすい超音波プローブ駆動装置を提供することができる。
【0054】
また、ラジアル駆動ユニット10と並列であると同時にリニア駆動モータ22と直列な位置に制御基板31を配置し、ラジアル駆動ユニット10と制御基板31とをフレキシブル基板である接続部34bで接続し、この接続部34bはラジアル駆動ユニット10の前面投影面積内に配置したので、装置の前面投影面積を増やすことがなく小型化が可能である。これに加え、従来のようにラジアル駆動ユニットと制御基板とをラジアル駆動ユニットの外側に配置されたリード線によって接続しするよりも、断線の可能性が低く製品寿命を延ばすことができる。
【0055】
また、超音波振動子2aから伝達される電気信号を増幅するヘッドアンプ基板34のヘッドアンプ部34aが、ラジアル駆動用モータ21との間にラジアル駆動力伝達機構12をはさんだ位置に配置されるので、ヘッドアンプをラジアル駆動モータの外側の回転軸に平行に配置するよりも、ヘッドアンプ基板34に対してラジアル駆動用モータ21の発熱の影響を受けにくくすることができる。また、前面投影面積を増やすことがなく小型化が可能である。
【0056】
図9は本発明の第2の実施の形態に係る超音波プローブ駆動装置の内部構造を示す説明図であり、図1と同じ構成要素には同じ符号を付して説明を省略する。
【0057】
ヘッドアンプ基板64は、硬質基板またはフレキシブル基板で、接続部65とは別体で構成される。
【0058】
接続部65は、フレキシブル基板またはフラットケーブルで、一方の端をヘッドアンプ基板64と接続し、もう一方の端を制御基板61と接続している。接続部64はラジアル駆動ユニット10の前面投影面積内に配設される。
【0059】
そのほかの構成や動作は第1の実施例と同様である。
【0060】
このような第2の実施の形態によっても、図1の発明の実施の形態と同様の効果が得られる。
【0061】
尚、図1乃至図2に示した超音波プローブ2としては、超音波振動子に接続する可撓性シャフトとアウターシース3の間にシースを設けないものに適用したが、超音波振動子に接続する可撓性シャフトをシースに内蔵し、この上からアウターシースを被せるものにも適用できる。
【0062】
[付記]
以上詳述したような本発明の上記実施形態によれば、以下の如き構成を得ることができる。
【0063】
(1)超音波を送受信する超音波振動子を内蔵した先端部及びこの先端部を一端側に設けた可撓性シャフトから成る超音波プローブが着脱自在であり、この超音波プローブの可撓性シャフトを回転させることにより前記超音波振動子を回転させてラジアル走査を行い、前記超音波プローブ全体を挿入軸方向に進退動させることにより前記超音波振動子を進退動させてリニア走査を行う超音波プローブ駆動装置において、
前記ラジアル走査の駆動のための動力を発生するラジアル駆動用モータ、前記超音波プローブを着脱自在に接続する超音波プローブ接続機構及び前記ラジアル駆動用モータの動力を前記超音波プローブの可撓性シャフトに伝達するラジアル駆動力伝達機構を含むラジアル駆動ユニットと、
前記リニア走査の駆動のための動力を発生するリニア駆動用モータ、前記ラジアル駆動ユニットを進退可能な状態で取り付けるリニア移動ガイド及び前記リニア駆動用モータの動力をリニア移動ガイドに伝達するリニア駆動力伝達機構を含むリニア駆動ユニットと、
を備え、前記リニア駆動用モータは前記ラジアル駆動ユニットのリニア移動範囲内であり、かつ前記ラジアル駆動ユニットと並列の位置に配置されることを特徴とする超音波プローブ駆動装置。
【0064】
(2)前記ラジアル駆動ユニットと並列であると同時に前記リニア駆動用モータと直列な位置に制御基板を配置したことを特徴とする付記1に記載の超音波プローブ駆動装置。
【0065】
(3)前記ラジアル駆動ユニットと前記制御基板とを接続するフレキシブル基板を有し、前記フレキシブル基板は前記ラジアル駆動ユニットの前面投影面積内に配置されることを特徴とする付記2記載の超音波プローブ駆動装置。
【0066】
(4)前記ラジアル駆動ユニットと前記制御基板とを接続するフラットケーブルを有し、前記フラットケーブルは前記ラジアル駆動ユニットの前面投影面積内に配置されることを特徴とする付記2記載の超音波プローブ駆動装置。
【0067】
(5)超音波振動子から伝達される電気信号を増幅するヘッドアンプ基板は、前記ラジアル駆動用モータとの間に前記ラジアル駆動力伝達機構をはさんだ位置に配置されることを特徴とする付記2記載の超音波プローブ駆動装置。
【0068】
(6)前記フレキシブル基板は、超音波振動子から伝達される電気信号を増幅するヘッドアンプ基板を含むことを特徴とする付記5記載の超音波プローブ駆動装置。
【0069】
【発明の効果】
以上述べた様にこの発明によれば、超音波プローブに対してラジアル走査とリニア走査の駆動を同時に行うことにより3次元駆動可能であるとともに、小型で操作性のよい超音波プローブ駆動装置を提供できる。
【図面の簡単な説明】
【図1】本発明に係る超音波プローブ駆動装置の第1の実施の形態を示す右側方から見た断面図。
【図2】図1の超音波プローブ駆動装置の上側から見た断面図。
【図3】図1の超音波プローブ駆動装置の左側から見た断面図。
【図4】図1の超音波プローブ駆動装置の正面から見た断面図。
【図5】図1の超音波プローブ駆動装置を用いた超音波診断装置の概略構成を説明する説明図。
【図6】図1の超音波プローブ駆動装置の第1の動作を示す説明図。
【図7】図1の超音波プローブ駆動装置の第2の動作を示す説明図。
【図8】図1の超音波プローブ駆動装置の第3の動作を示す説明図。
【図9】本発明に係る超音波プローブ駆動装置の第2の実施の形態を示す右側方から見た断面図。
【符号の説明】
5 …超音波プローブ駆動装置
2a …先端部
2b …可撓性シャフト
2 …超音波プローブ
11 …ラジアル駆動用モータ
12 …ラジアル駆動力伝達機構
13 …コネクタ
14 …ラジアル地板
10 …ラジアル駆動ユニット
20 …リニア駆動ユニット
21 …リニア移動ガイド
22 …リニア駆動用モータ
23 …リニア駆動力伝達機構
Claims (1)
- 超音波を送受信する超音波振動子を内蔵した先端部及びこの先端部を一端側に設けた可撓性シャフトから成る超音波プローブが着脱自在であり、この超音波プローブの可撓性シャフトを回転させることにより前記超音波振動子を回転させてラジアル走査を行い、前記超音波プローブ全体を挿入軸方向に進退動させることにより前記超音波振動子を進退動させてリニア走査を行う超音波プローブ駆動装置において、
前記ラジアル走査の駆動のための動力を発生するラジアル駆動用モータ、前記超音波プローブを着脱自在に接続する超音波プローブ接続機構及び前記ラジアル駆動用モータの動力を前記超音波プローブの可撓性シャフトに伝達するラジアル駆動力伝達機構を含むラジアル駆動ユニットと、
前記リニア走査の駆動のための動力を発生するリニア駆動用モータ、前記ラジアル駆動ユニットを進退可能な状態で取り付けるリニア移動ガイド及び前記リニア駆動用モータの動力をリニア移動ガイドに伝達するリニア駆動力伝達機構を含むリニア駆動ユニットと、
外部からの接続コードが接続されると共に、前記リニア駆動ユニットに直列に配置され、前記ラジアル駆動ユニット及び前記リニア駆動ユニットに電気的に接続されて前記ラジアル走査を制御する制御基板と、
を備え、
相互に直列に配置される前記リニア駆動用モータと前記制御基板との配置領域は、前記ラジアル駆動ユニットの進退方向に並列で且つ進退範囲に対応した領域であり、
前記制御基板に対して移動する前記ラジアル駆動ユニットと前記制御基板とは平坦で湾曲自在な部材により電気的に接続されており、前記平坦で湾曲自在な部材は前記ラジアル駆動ユニットの進退に必要なスペースに前記ラジアル駆動ユニットの前面投影面内で湾曲して配置されることを特徴とする超音波プローブ駆動装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP31565199A JP4468523B2 (ja) | 1999-11-05 | 1999-11-05 | 超音波プローブ駆動装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP31565199A JP4468523B2 (ja) | 1999-11-05 | 1999-11-05 | 超音波プローブ駆動装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2001128978A JP2001128978A (ja) | 2001-05-15 |
| JP2001128978A5 JP2001128978A5 (ja) | 2006-11-16 |
| JP4468523B2 true JP4468523B2 (ja) | 2010-05-26 |
Family
ID=18067944
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP31565199A Expired - Lifetime JP4468523B2 (ja) | 1999-11-05 | 1999-11-05 | 超音波プローブ駆動装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4468523B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4681977B2 (ja) * | 2005-08-05 | 2011-05-11 | オリンパス株式会社 | 超音波診断装置、超音波プローブ駆動装置及び超音波プローブ |
-
1999
- 1999-11-05 JP JP31565199A patent/JP4468523B2/ja not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| JP2001128978A (ja) | 2001-05-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US5373849A (en) | Forward viewing imaging catheter | |
| US8083681B2 (en) | Ultrasonic probe | |
| US5181514A (en) | Transducer positioning system | |
| JP3276008B2 (ja) | 超音波プローブアセンブリ | |
| CA2331802A1 (en) | Combined motor drive and automated longitudinal position translator for ultrasonic imaging system | |
| JP4468523B2 (ja) | 超音波プローブ駆動装置 | |
| US6471653B1 (en) | Transesophageal ultrasound probe with motor in the tip for scan-plane rotation | |
| JP3696000B2 (ja) | 超音波プローブ | |
| JP2000175917A (ja) | 超音波トランスデューサ軸方向移動装置および超音波カテーテル診断装置 | |
| JP4339609B2 (ja) | 超音波診断システム装置 | |
| JP3067300B2 (ja) | 内視鏡装置 | |
| JP4681977B2 (ja) | 超音波診断装置、超音波プローブ駆動装置及び超音波プローブ | |
| JP2618934B2 (ja) | 超音波内視鏡 | |
| JP3691646B2 (ja) | 超音波プローブ | |
| JP2006312103A (ja) | 超音波診断装置 | |
| JP2003310620A (ja) | 超音波内視鏡 | |
| JP2602830B2 (ja) | 超音波診断装置 | |
| JP3852296B2 (ja) | 超音波プローブ | |
| JP3231526B2 (ja) | 超音波内視鏡 | |
| JPH11299788A (ja) | 超音波プローブ | |
| CN215018590U (zh) | 一种介入式超声成像装置 | |
| JP2003180695A (ja) | 超音波プローブ駆動装置 | |
| JP2000217824A (ja) | 超音波内視鏡 | |
| JP2001128978A5 (ja) | ||
| JP2001112759A (ja) | 超音波内視鏡 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20061002 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20061002 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20090430 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090512 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090713 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100202 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100225 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4468523 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130305 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140305 Year of fee payment: 4 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| EXPY | Cancellation because of completion of term |