JP4465397B2 - 超音波モータ - Google Patents
超音波モータ Download PDFInfo
- Publication number
- JP4465397B2 JP4465397B2 JP2008124843A JP2008124843A JP4465397B2 JP 4465397 B2 JP4465397 B2 JP 4465397B2 JP 2008124843 A JP2008124843 A JP 2008124843A JP 2008124843 A JP2008124843 A JP 2008124843A JP 4465397 B2 JP4465397 B2 JP 4465397B2
- Authority
- JP
- Japan
- Prior art keywords
- ultrasonic
- ultrasonic transducer
- rotor
- ultrasonic motor
- preload
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images














Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/10—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing rotary motion, e.g. rotary motors
- H02N2/103—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing rotary motion, e.g. rotary motors by pressing one or more vibrators against the rotor
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/0005—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing non-specific motion; Details common to machines covered by H02N2/02 - H02N2/16
- H02N2/001—Driving devices, e.g. vibrators
- H02N2/003—Driving devices, e.g. vibrators using longitudinal or radial modes combined with bending modes
- H02N2/004—Rectangular vibrators
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/0005—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing non-specific motion; Details common to machines covered by H02N2/02 - H02N2/16
- H02N2/005—Mechanical details, e.g. housings
- H02N2/0055—Supports for driving or driven bodies; Means for pressing driving body against driven body
Landscapes
- General Electrical Machinery Utilizing Piezoelectricity, Electrostriction Or Magnetostriction (AREA)
Description
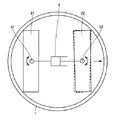
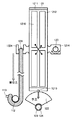
図1から図4を参照して、実施の形態1における超音波モータの構成について説明する。なお、図1は、この発明の実施の形態1における超音波モータの全体斜視図であり、図2は、この発明の実施の形態1における超音波モータの分解斜視図である。また、図3は、この発明の実施の形態1における超音波モータの4点接触を説明する模式図であり、図4は、この発明の実施の形態1における超音波モータの他の形態を示す平面模式図である。円筒形状のロータ1に、2つの超音波振動子21および22が、それぞれ、接点211、212(図示省略)、および接点221、222を介して内接している。
図2を参照して、予圧機構および超音波振動子保持機構について説明する。超音波振動子21および22は、それぞれその中央に、貫通穴213および223が設けられている。この穴に、シャフト31および32が通され、予圧機構3における、上部パンタグラフ33および下部パンタグラフ34が、それぞれこのシャフトの上下端を保持している。
図3を参照して、4点接触となる原理について説明する。図3に示された、超音波振動子22における片方の頂点のみロータ1に接している状態で、予圧機構3を用いて、両超音波振動子間距離をさらに広げる。超音波振動子22は平面形状が長方形であり、ロータ1にはその長辺側面を向けて配されており、予圧機構3は、その一部が、長辺側面に対向する側面の略中央部を押圧する。
貫通穴213および223には、ロータ1の外側へ向けての圧力が加えられているため、超音波振動子21および22における振動を阻害するおそれがある。そこで、上述した図2に示した貫通穴213、223は、2つの振動モードの節であり、振動が最も小さい部位である、超音波振動子21および22の中心に設けられている。この構成により、貫通穴近辺は殆ど振動しないので、この部位を用いてシャフト31および32により超音波振動子21および22を拘束した際の影響は最低限に留められる。
本実施の形態では、説明の簡便のため超音波振動子形状を矩形であるとした。しかし、本発明の本質は、現実的に実現困難であった円筒状ロータへの4点での内接を、超音波振動子に新たに1つの回転自由度を加えたことにより、具現化した点にある。すなわち、4点以上で内接することを所望する全ての超音波モータについて適用可能な発明である。たとえば、図17に示されるような扇形形状の超音波振動子を用いた超音波モータについても、同様の効果が得られる。
同様に、予圧を与えるパンタグラフ型予圧機構3についても、2つの超音波振動子に、ロータ1の外側に向けて圧力を加える役割を果たす構成要素が、超音波振動子に設けられた回動可能な回転軸を保持している形態であれば、その構成、仕組みに関係なく、本発明の効果は得られるものと捉えられるべきである。
ロータについても、本実施の形態に記されたものに限定されない。たとえばロータ脱落防止のための溝がロータ1の内部に設けられている構成の採用も可能である。さらに、回転体でなく矩形の溝を用いた超音波モータであっても本発明は同様に適用できる。
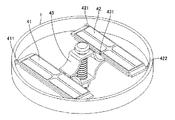
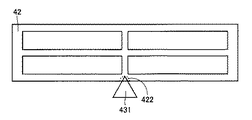
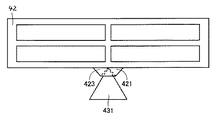
図5から図9を参照して、実施の形態2における超音波モータの構成について説明する。なお、説明の簡便のため、上記実施の形態と同じ構成要素については同一番号を付し、その説明を繰り返さない。また、図5は、この発明の実施の形態2における超音波モータの全体斜視図であり、図6は、この発明の実施の形態2における超音波モータの分解斜視図であり、図7は、この発明の実施の形態2における超音波モータに採用される超音波振動子保持部の構造を示す模式図である。また、図8は、この発明の実施の形態2における超音波モータに採用される超音波振動子保持部の他の構造を示す模式図であり、図9は、この発明の実施の形態2における超音波モータに採用される超音波振動子保持部のさらに他の構造を示す模式図である。
図5および図6に示すように、超音波振動子41および42は、突起431を有するパンタグラフ型予圧機構43によって、ロータ1の外側に押し広げられる構成を有し、ロータ1に内接している。その他は実施の形態1と同様である。
超音波振動子41および42は鏡面対称であるので、以下、超音波振動子42のみについて、図7を参照して説明する。超音波振動子42は、その側面中央部に凹み421を有する。これにより、組み立ての際に突起431の、超音波振動子42に対する位置を定めることができる。また、超音波振動子42に外力が加わった際、突起431の、超音波振動子42に対する位置がずれるのを防ぐことができる。
Claims (4)
- 機械的出力を行う円筒状ロータと、
前記ロータに内接する2頂点を有する複数の超音波振動子と、
前記超音波振動子を、前記ロータの内側から外側に向けて押しつける予圧機構と、を備え、
前記超音波振動子は、前記超音波振動子を含む平面内において、前記予圧機構に対して回動可能に設けられていることを特徴とする、超音波モータ。 - 前記回動可能部位は、前記超音波振動子の振動の節であることを特徴とする、請求項1記載の超音波モータ。
- 前記超音波振動子は、その振動の節に貫通穴を有し、この貫通穴に通されたシャフトを用いて、前記予圧機構に対して回動可能に保持されることを特徴とする、請求項2記載の超音波モータ。
- 前記超音波振動子は平面形状が長方形であり、前記ロータにはその長辺側面を向けて配されており、
前記予圧機構は、その一部が、前記長辺側面に対向する側面の略中央部を押圧することを特徴とする、請求項2または3記載の超音波モータ。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008124843A JP4465397B2 (ja) | 2008-05-12 | 2008-05-12 | 超音波モータ |
| US12/463,195 US7932660B2 (en) | 2008-05-12 | 2009-05-08 | Ultrasonic motor |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008124843A JP4465397B2 (ja) | 2008-05-12 | 2008-05-12 | 超音波モータ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009278702A JP2009278702A (ja) | 2009-11-26 |
| JP4465397B2 true JP4465397B2 (ja) | 2010-05-19 |
Family
ID=41266277
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008124843A Expired - Fee Related JP4465397B2 (ja) | 2008-05-12 | 2008-05-12 | 超音波モータ |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US7932660B2 (ja) |
| JP (1) | JP4465397B2 (ja) |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006333677A (ja) * | 2005-05-30 | 2006-12-07 | Nikon Corp | 超音波モータ制御装置 |
| JP4981547B2 (ja) * | 2007-06-28 | 2012-07-25 | オリンパスイメージング株式会社 | 駆動装置および撮像装置 |
| JP5459192B2 (ja) * | 2010-12-06 | 2014-04-02 | 株式会社ニコン | 振動波モータ、レンズ鏡筒及びカメラ |
| JP5776270B2 (ja) | 2011-03-29 | 2015-09-09 | セイコーエプソン株式会社 | 圧電アクチュエーター、モーター、ロボットハンドおよびロボット |
| JP5929138B2 (ja) | 2011-12-06 | 2016-06-01 | セイコーエプソン株式会社 | 圧電モーターおよびロボット |
| JP6218501B2 (ja) | 2013-08-26 | 2017-10-25 | キヤノン株式会社 | 振動波モータ |
| BE1022342B1 (nl) * | 2014-01-09 | 2016-03-25 | Xeryon Bvba | Positioneringsinrichting |
| CN105900329B (zh) | 2014-02-18 | 2018-10-16 | 夏普株式会社 | 摩擦驱动致动器 |
| WO2015125358A1 (ja) | 2014-02-18 | 2015-08-27 | シャープ株式会社 | 医療装置 |
| CN107615638A (zh) * | 2015-05-21 | 2018-01-19 | 夏普株式会社 | 超声波致动器 |
| IT202000003533A1 (it) * | 2020-02-20 | 2021-08-20 | Phi Drive S R L | Motore rotativo piezoelettrico e metodo di movimentazione rotativo |
| JP2022175615A (ja) | 2021-05-14 | 2022-11-25 | セイコーエプソン株式会社 | 振動モーターおよび駆動装置 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| SE436675B (sv) * | 1975-08-12 | 1985-01-14 | Ki Politekhnichsky I Im 50 Let | Elektrisk motor driven genom piezoelektriska krafter |
| JPH0241672A (ja) * | 1988-07-29 | 1990-02-09 | Toyo Electric Mfg Co Ltd | 超音波モータ |
| JPH04200283A (ja) * | 1990-11-29 | 1992-07-21 | Juki Corp | 超音波モータ |
| JPH06189569A (ja) * | 1992-12-16 | 1994-07-08 | Zexel Corp | 超音波モータ |
| CN1241322A (zh) * | 1997-08-04 | 2000-01-12 | 精工爱普生株式会社 | 传动装置及使用它的钟表和通知装置 |
| WO1999031740A1 (en) * | 1997-12-15 | 1999-06-24 | Nanomotion Ltd. | Conveying means and method |
| JP4669222B2 (ja) * | 2001-10-22 | 2011-04-13 | ミニスイス・ソシエテ・アノニム | 圧電駆動装置 |
| JP4229095B2 (ja) * | 2002-06-14 | 2009-02-25 | セイコーエプソン株式会社 | 駆動装置およびこれを備えた装置 |
| US6867532B2 (en) * | 2003-07-17 | 2005-03-15 | The Brady Group Inc. | Long life piezoelectric drive and components |
| JP3989943B2 (ja) | 2005-09-15 | 2007-10-10 | シャープ株式会社 | 羽ばたき浮上移動装置 |
| JP2008301673A (ja) * | 2007-06-04 | 2008-12-11 | Konica Minolta Opto Inc | 摩擦駆動アクチュエータおよびそれを用いるハードディスク装置 |
-
2008
- 2008-05-12 JP JP2008124843A patent/JP4465397B2/ja not_active Expired - Fee Related
-
2009
- 2009-05-08 US US12/463,195 patent/US7932660B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| US7932660B2 (en) | 2011-04-26 |
| US20090278421A1 (en) | 2009-11-12 |
| JP2009278702A (ja) | 2009-11-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4465397B2 (ja) | 超音波モータ | |
| US8299682B2 (en) | Ultrasonic motor | |
| CN105634324A (zh) | 一种两自由度双定子球形压电作动器及其控制方法 | |
| CN101310433B (zh) | 超声波马达 | |
| KR20090057437A (ko) | 진동 액추에이터 | |
| CN100428618C (zh) | 开槽金属方柱压电片复合超声微电机 | |
| JP3741876B2 (ja) | 弾性表面波アクチュエータ | |
| JP2009044838A (ja) | 超音波アクチュエータ、及び圧電変位部の製造方法 | |
| JP2009219281A (ja) | 圧電アクチュエータ | |
| JP2012513188A (ja) | 圧電モータ | |
| JP2006271065A (ja) | 駆動装置 | |
| JP4979017B2 (ja) | 超音波モータおよびそれに用いられる超音波振動子 | |
| JP4654884B2 (ja) | 多自由度超音波モータ | |
| JP2012065454A (ja) | 振動アクチュエータ | |
| JP4578799B2 (ja) | 圧電アクチュエータ及びそれを用いた電子機器 | |
| JP4316350B2 (ja) | 超音波モータ及び超音波モータ付電子機器 | |
| JPH02311184A (ja) | 超音波モータ | |
| JP2009219280A (ja) | 圧電アクチュエータ | |
| JP4650221B2 (ja) | 多自由度超音波モータ | |
| JPH0232771A (ja) | 進行波モータ | |
| Kondo et al. | Miniaturization of the traveling wave ultrasonic linear motor using series connection of bimorph transducers | |
| JPH07178370A (ja) | 振動子及び振動アクチュエータ | |
| JP2021197798A (ja) | アクチュエータ | |
| JP4654885B2 (ja) | 超音波モータ | |
| JP2543160B2 (ja) | 円環形超音波モ―タ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100126 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100222 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130226 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4465397 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130226 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140226 Year of fee payment: 4 |
|
| LAPS | Cancellation because of no payment of annual fees |