JP4464493B2 - 内視鏡システム - Google Patents
内視鏡システム Download PDFInfo
- Publication number
- JP4464493B2 JP4464493B2 JP24006399A JP24006399A JP4464493B2 JP 4464493 B2 JP4464493 B2 JP 4464493B2 JP 24006399 A JP24006399 A JP 24006399A JP 24006399 A JP24006399 A JP 24006399A JP 4464493 B2 JP4464493 B2 JP 4464493B2
- Authority
- JP
- Japan
- Prior art keywords
- unit
- bending
- motor
- endoscope system
- drum
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images














Landscapes
- Instruments For Viewing The Inside Of Hollow Bodies (AREA)
- Endoscopes (AREA)
Description
【発明の属する技術分野】
本発明は、挿入部が細長な内視鏡と、この挿入部を巻回するドラムとを備えた内視鏡システムに関する。
【0002】
【従来の技術】
従来より、細長の挿入部をボイラ,タービン,エンジン,化学プラントなどの内部に挿入して、傷の有無や腐蝕などを観察したり検査することのできる工業用内視鏡が広く利用されている。
【0003】
工業用分野で使用される内視鏡は、配管やボイラ等に挿管される細長な挿入部を有する内視鏡、この内視鏡に照明光を供給する光源装置、前記内視鏡からの映像信号を電気的に処理する処理部及び処理信号を表示させるモニタ等を備えた内視鏡システムとして構成されている。このため、これらを現場まで運搬し、その場でセッティングして初めて内視鏡を使用することができるようになっていた。つまり、この形態では、内視鏡システムの運搬、セッティング作業に多くの労力を必要とし、内視鏡システムとしての使い勝手が悪かった。
【0004】
可搬性を向上させる1例として、特開平10−57299号公報には内視鏡の挿入部を巻回して収納する収納部と、モニタ、光源部、制御部を一体的に構成した内視鏡装置用収納ケースが示されている。
【0005】
しかし、この構成では、収納部より内視鏡を取り出した後、この内視鏡と光源部及び制御部を接続して初めて使用可能な状態になるため、運搬性はある程度向上するが、取扱い性に問題があった。つまり、内視鏡システムとしての取扱い性を向上させるためには前記特開平10−57299号公報に示された内視鏡装置用収納ケースの構成に加え、何らかの工夫をする必要がある。
【0006】
理想的には、1つにパッケージングされた内視鏡システムを現場まで運搬し、内視鏡と光源部及び制御部との接続作業を行うことなく、つまり、挿入部を引き出すだけで使用できることが望ましい。しかし、挿入部の基端部には、この挿入部の先端側に設けられている湾曲部を湾曲動作させるための操作部が配置されている。このため、掃除機等の巻回されている電源コードを引き出すように、内視鏡を容易に準備することは難しかった。
【0007】
また、近年では、湾曲操作の省力化を図るため、湾曲操作をコントローラを用いて電動にて行う電動湾曲内視鏡が複数の公報等に記載されている。
【0008】
特に、米国特許5373317号においては、挿入部の基端側に、モニタや湾曲制御用のモータ、回路基板を備えた操作部が設けられ、湾曲制御を電動により行うことが記されている。しかし、操作部にモニタやモータを配置しているため、操作部自体が大型になり、収納性、取扱い性に問題があった。つまり、湾曲操作する操作機構の大きさ、配置位置が、収納性及び取扱い性に悪影響を及ぼしていた。
【0009】
このため、本出願人は、システムの可搬性と操作性とを共に向上させる目的で特願平10−261767号に、湾曲入力制御部を挿入部から独立させ、挿入部巻回用ドラム内のデッドスペースに電動湾曲ユニットを配置した電子内視鏡装置を提案している。このことにより、挿入部を収納するに当たって操作部が邪魔にならない構成になっている。
【0010】
【発明が解決しようとする課題】
しかしながら、前記特願平10−261767号の電子内視鏡装置に記載されている電動湾曲ユニットは、モータをドラムの厚み方向略全域を使用し、かつモータがドラム中心を向く位置関係に配置されている。このため、モータが長軸方向に大型化することによってドラム部の内部空間に電動湾曲ユニットを収納できなくなるおそれがある。また、モータが大型化することにより、ドラム内の他の装置の配置位置に悪影響が生じるおそれがある。
【0011】
特に、長尺のスコープの湾曲性能の向上を図るためには、挿入部内での湾曲伝達系(湾曲ワイヤ、ワイヤ案内管)の摩擦が増加して、湾曲させるために必要なワイヤ牽引力量が大きくなってしまうので高出力のモータが不可欠になる。つまり、長尺のスコープを湾曲させるためにはモータの大型化、高出力化が必要となり、モータが大型になることでドラムの大型化に直結し、このことがシステム自体を大型化させて可搬性を損なう要因になっていた。
【0012】
さらに、湾曲性能が検査性能に直接的に寄与する内視鏡においては、制御上、エンコーダ等をモータに設置してフィードバックをかける必要があり、その場合にはモータの長軸方向がさらに大きなものになってしまう。このことも内視鏡システム自体を大型化させる可能性がある。
【0013】
本発明は上記事情に鑑みてなされたものであり、可搬性及び取扱い性を向上させるとともに、小型化を図り、かつ長尺スコープでも湾曲性能の良好な湾曲駆動装置を備えた内視鏡システムを提供することを目的にしている。
【0014】
【課題を解決するための手段】
本発明の内視鏡システムは、細長な挿入部に湾曲部を有する内視鏡と、この内視鏡の挿入部が巻回される外周面部を備えた管状部材を有し、収納ケースに回動自在に収納されるドラム部と、このドラム部の内部空間に固定されるベース本体の一面側に配置された、前記湾曲部から延出された湾曲操作ワイヤを電動で牽引動作させて該湾曲部を湾曲させる電動湾曲ユニットと、を有する内視鏡システムであって、
前記電動湾曲ユニットは、駆動力を発生させる駆動源となるモータ部材と、前記モータ部材からの出力を当該モータ部材のモータ軸に対して直交する方向に変換する出力軸を備えた直交ギヤヘッドと、前記出力軸に配置されて前記湾曲操作ワイヤの端部が接続されたチェーンを移動させる回動盤と、を有して構成される長軸体のモータユニットを備え、
前記モータユニットは、前記直交ギヤヘッドの出力軸を該ベース本体の一面側に突出させ、且つ、前記モータ部材の先端部を前記湾曲操作ワイヤと前記チェーンとが接続された接続部方向に位置する前記管状部材の内周曲面に向けて、前記ベース本体の他面側に配置されている。
【0015】
この構成によれば、湾曲操作ワイヤの端部が接続され回動盤によって移動されるチェーン、モータユニットをベース本体に対して効率よく配置することにより、ドラム部の小型化を図れる。
【0016】
【発明の実施の形態】
以下、図面を参照して本発明の実施の形態を説明する。
図1ないし図8は本発明の一実施形態に係り、図1は内視鏡システムの概略構成を説明する図、図2は内部空間に内蔵物を配置したドラム部を説明する図、図3は電動湾曲ユニットを構成するベース本体を示す図、図4はベース本体の配置固定例を示す図、図5はモータユニットを説明する図、図6はドラム部の内部空間の構成と、空間部に配置された内蔵物の配置構成を説明する図、図7は電動湾曲ユニットの構成を説明する図、図8はベース本体に設けられる方向変換手段の構成を説明する図である。なお、図6(a)は内部空間の構成と、この内部空間に配置される内蔵物の配置構成を説明する斜視図、図6(b)は内部空間の構成と、この内部空間に配置される内蔵物の配置構成を説明する上方向から見たときの図、図7(a)は図3のA−A断面図,図7(b)は図7(a)のB−B断面図及びC−C断面図の両方の断面を示す図である。
【0017】
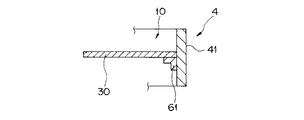
図1に示すように本実施形態の内視鏡システム1は、細長で柔軟性を有する挿入部2を備えた工業用内視鏡3と、前記挿入部2を巻回する外周面部4aを有する略円柱箱体形状のドラム部4と、このドラム部4を回動自在に収納する破線で示す収納ケース5と、前記工業用内視鏡3の後述する湾曲部の湾曲等の操作を行う遠隔操作制御部であるコントローラ6とで主に構成されている。
【0018】
前記挿入部2は、先端側から順に、観察光学系として固体撮像素子(不図示)を内蔵した先端部2aと、この先端部2aを所望の方向に向けるように湾曲駒を回動自在に連接して湾曲自在なする湾曲部2bと、柔軟性を有する可撓管部2cとによって構成されている。なお、この挿入部2内には後述する湾曲操作部材を構成する湾曲操作ワイヤや図示しない信号線、ライトガイド等が挿通配置されている。
【0019】
前記収納ケース5は、前記ドラム部4が収納配置されるケース本体5aと、蓋体5bとで構成され、この蓋体5bの例えば表側上面には運搬のとき把持する取っ手(不図示)が設けられている。
【0020】
前記ケース本体5aには前記ドラム部4を回動自在に軸支する軸体13が設けられている。つまり、前記ドラム部4はケース本体5a内において回動自在である。前記ドラム部4の外周面部4aには前記挿入部2を、このドラム部4の内部空間に配置される後述する電動湾曲ユニットに導く開口(図2参照)4bが形成されている。
【0021】
前記収納ケース5内から延出するケーブル6a内には細長でかつ柔軟で、内部に制御信号及び映像信号を伝送する図示しない信号線や光通信ケーブル等が挿通している。このケーブル6aの基端部は前記コントローラ6に接続されている。
【0022】
前記コントローラ6には、前記挿入部2の湾曲部2bを操作する操作手段である湾曲入力制御部となるジョイスティック6b及び前記固体撮像素子に結像した観察画像を表示する表示手段として例えば液晶モニタ等で構成された観察部6cが設けられている。なお、符号9は電源スイッチである。
【0023】
前記ドラム部4は、前記挿入部2が外周に巻回される管状部材41と、この管状部材41の両端開口を閉鎖する1組みの円板部材42とで構成されている。
【0024】
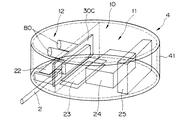
図2に示すように円板部材42は、図中上面側を形成する上面板43と下面側を形成する下面板44とで構成されており、これら管状部材41と、上面板43と、下面板44とで形成される内部空間10には、内蔵物として前記湾曲部2bを電動で湾曲させるための駆動機構を備えた電動湾曲ユニット21と、前記湾曲部2bの湾曲状態を前記ジョイスティック6bからの操作信号を元に制御する電動湾曲回路部22と、前記固体撮像素子で光電変換された画像信号をTV信号に変換する画像処理回路及び前記固体撮像素子を駆動するためタイミング発生回路等を備えたカメラコントロールユニット(以下CCUと記載する)23と、観察のための照明光を供給する光源部24と、電源供給部となる電源ユニット25等の周辺機器が配置されている。
【0025】
そして、前記電動湾曲ユニット21と、前記電動湾曲回路部22とは駆動ケーブル(不図示)によって接続されている。前記挿入部2の基端部は、開口4bを介し内部空間10内に配置される電動湾曲ユニット21に設置されている。前記挿入部2内を挿通して先端部2aから延出されている信号線はCCU23に接続され、同様に延出されているライトガイドは光源部24に接続されている。
【0026】
前記CCU23は、前記固体撮像素子から伝送された画像信号をTV信号に変換処理し、この後、このTV信号をケーブル6aを介してコントローラ6の観察部6cへ伝送する。
【0027】
前記電動湾曲回路部22は、前記コントローラ6のジョイスティック6bを操作して得られる駆動制御信号を、電動湾曲ユニット21の後述するモータユニットに伝送する。この駆動制御信号を受けることによって、前記湾曲部2bが前記ジョイスティック6bの操作に応じた湾曲動作を行うようになっている。
【0028】
前記光源部24はライトガイドの後端面に照明光を供給する。この後端面に供給された照明光は、ライトガイドを経て先端部2aから被観察体に向かって出射される。
【0029】
前記電源ユニット25は、前記電動湾曲ユニット21、前記電動湾曲回路部22、前記CCU23、前記光源部24へ電力を供給しており、バッテリー式、又は外部からの電力を使用するAC−DC電源である。
【0030】
ここで、電動湾曲ユニット21の構成を説明する。
図3に示すように前記挿入部2の基端部は、管状部材41の外周面部4aに形成された開口4bを通過してドラム部4の内部空間内に前記管状部材41の中心軸に対して直交する向きで配置されている電動湾曲ユニット21を構成するベース本体30に設置されている。このベース本体30には上下湾曲用及び左右湾曲用の2つのモータユニット80が取り付けられている。
【0031】
前記ベース本体30は、略D字形状で、外周面を連続した1つの円弧で形成した曲面部30aと1つの弦からなる平面部30bとで構成されている。この曲面部30aは、前記ドラム部4を構成する管状部材41の内周曲面と同形状又は相似形状である。
【0032】
そして、図4に示すようにベース本体30は、管状部材41の内周面に対して金具を用いてのビス固定或いは溶接、接着、係合等のいずれかの手段から成る接続部61によって内部空間10内に一体的に固定されている。なお、本実施形態においては接続部61を複数箇所設けて固定する構成であるが、接続部61を1つだけ設けて固定する構成であってもよい。
【0033】
図5に示すように前記モータユニット80は、駆動力を発生させる駆動源となるモータ部材81と、減速ギヤヘッド82と、両者からの出力をモータ軸に対して直交する方向に変換する直交ギヤヘッド83とで主に構成され、この直交ギヤヘッド83には両出力タイプの出力軸85が設けられている。前記出力軸85の一方にはその回転位置を認識するためのセンサ部としてポテンショメータ(図7(a)符号39参照)が配置されるようになっており、他方の出力軸85には回動盤としてスプロケット(図7符号35参照)が配置されるようになっている。
【0034】
図6(a),(b)に示すように本実施形態においては、ドラム部4の内部空間10を異なる大小の体積を有する第1空間部11と第2空間部12に分割し、後述するようにモータユニット80の一部を、第2空間部12内に位置するよう、略D字形状のベース本体30を管状部材41の内周曲面に配置する。このとき、第1空間部11と第2空間部12との分割は、図3に示す電動湾曲ユニット21の中心線であるA−A線によって行う。
【0035】
そして、図に示すように体積の大きな第1空間部11に前記光源部24及び前記電源ユニット25を配置し、体積の小さな第2空間部12に前記電動湾曲ユニット21を構成する直交ギヤヘッド83を含めたモータユニット80及び電動湾曲回路部22,CCU23を配置している。
【0036】
前記モータユニット80は長軸体である。このため、このモータユニット80を内部空間10内に配置する際、前記出力軸85を第1空間部11側に配置して、このモータユニット80を構成するモータ部材81及び減速ギヤヘッド82を第2空間部12に配置している。つまり、前記モータユニット80は、図6(b)に示すように第2の空間部12の領域から一部がはみ出した状態に配置されている。
【0037】
なお、図6(a),(b)において、前記モータユニット80の一部が第2の空間部12よりはみ出した状態で収納されているが、モータユニット80の全体を第2の空間部12に含まれるように配置しても良いことは勿論である。
【0038】
このとき、前記図3に示すように前記モータユニット80を、それぞれ角度θ1、θ2傾け、前記モータ部材81の先端部がベース本体30の曲面部30a(管状部材41の内周曲面)方向を向くように配置している。
【0039】
なお、角度θ1、θ2の値は、同一であっても、異なる角度であってもよく、角度θ1、θ2の値を小さく設定することによって長さの長いモータユニットの配置が可能又は電動湾曲ユニット21の小型化、つまり、省スペース化を図れる。
【0040】
このように、前記モータユニット80を、傾けて配置することにより、モータユニット80の端部に配線処理を行うためのスペースの確保を行える。
【0041】
また、電動湾曲回路部22等の電気制御回路部品については、比較的形状が自在であるため、電動湾曲ユニット21を設けた後に形成されるスペースを考慮してそれぞれの部品を所定の形状に形成している。
【0042】
図7に示すように前記モータユニット80の出力軸85には、このモータユニット80の動作と連動し回動するスプロケット35が取り付けられている。このスプロケット35には牽引動作によって湾曲部2bを湾曲させる湾曲操作ワイヤ31(図3参照)に接続するチェーン36が噛合している。
【0043】
図7(a)に示すように上下湾曲用のモータユニット80と左右湾曲用のモータユニット80に配置されるスプロケット35は、ベース本体30の一面側に異なる高さ、即ち2層構造で取り付けられている。
【0044】
図7(b)で示すようにそれぞれのスプロケット35には湾曲操作部材を構成するチェーン36が噛合しており、カバー部材32によってこのスプロケット35からチェーン36が脱落することが防止されている。
【0045】
また、前記チェーン36の走行を規制するため、前記カバー部材32の延長線外側にガード33を設ける一方、延長線内側にガイド34をそれぞれ設けている。なお、前記ガード33をスプロケット35側に配置し、前記ガイド34を前記ガード33より前方側に配置している。なお、符号40は前記上下湾曲用及び左右湾曲用のスプロケット35とチェーン36とを分離するとともに共にガイドする目的で配置した仕切り部材である。
【0046】
前記チェーン36の両端部にはそれぞれ前記湾曲操作ワイヤ31の端部に設けられている雄部38が係合する雌部37が設けてある。つまり、この雄部38と雌部37とを一体的に係合させることによって、チェーン36と湾曲操作ワイヤ31とが一体的に接続される。
【0047】
このことにより、前記モータユニット80が駆動を開始すると、出力軸85に取り付けられているスプロケット35が回動して、このスプロケット35に噛合したチェーン36が移動されるのに伴い、このチェーン36に接続されている湾曲操作ワイヤ31が牽引動作する。つまり、前記湾曲操作ワイヤ31が牽引動作することによって湾曲部2bが湾曲動作する。
【0048】
前記図3に示すように前記湾曲操作ワイヤ31は、挿入部2内では主にステンレス等の金属からなる案内管50によってガイドされている。この案内管50は、前記ベース本体30に設けた支持部材51に固定されている。そして、前記湾曲操作ワイヤ31は、前記支持部材51と前記ガイド34との間に配置した後述するワイヤ外れ防止手段55を備えた方向変換手段52によって延出方向を約90度変換されている。つまり、電動湾曲ユニット21と挿入部2とはベース本体30上で約90度が位置関係が異なっている。
【0049】
ここで、図8を参照して前記方向変換手段52について説明する。
前記方向変換手段52は、ベース本体30に固定された2つの軸体58a,58bと、この軸体58aに回動自在に積層配置された、湾曲操作ワイヤ31を保持するローラ部53と、前記軸体58bに回動自在に積層配置された前記湾曲操作ワイヤ31が前記ローラ部53から脱落するのを防止する抑えローラ部56とで構成され、前記ローラ部53の間及び抑えローラ部56との間には間隔調整用のスペーサ54がそれぞれ配置されている。
【0050】
なお、前記方向変換手段52は、4本の上下、左右用の湾曲操作ワイヤ31にそれぞれ対応するよう配設されている。また、前記ローラ部53及び抑えローラ部56は、主にボールベアリングによって形成されている。
【0051】
上述のように構成した内視鏡システム1の作用を説明する。
内視鏡システム1は、保管時或いは輸送時等の使用状況以外では、挿入部2がドラム部4を構成する管状部材41に巻回された状態になっている。
【0052】
内視鏡観察を行う際まず、収納ケース5の蓋体5bを開け、コントローラ6を取り出す。
その後、巻回されている挿入部2の先端部近傍を把持して、ゆっくりと挿入部2を取り出していく。すると、このとき生じる引っ張り力によって、ドラム部4が回転することにより挿入部2がスムーズに引き出されていく。そして、必要な長さだけ挿入部2を引き出した所で検査準備完了になる。
【0053】
ここで、ケース本体5aに設けられている電源スイッチ9を操作してオン状態にすると、コントローラ6、電動湾曲ユニット21,電動湾曲回路部22、CCU23、光源部24が動作状態になる。
そして、本実施形態ではドラム部4の内部空間内において、挿入部2内を挿通するライトガイドと光源部24、信号線とCCU23とがそれぞれ接続状態である。つまり、ライトガイドと光源部24及び信号線とCCU23との接続作業を行うことなく、上述した一連の簡単な作業で内視鏡検査のためのセッティングが完了する。
【0054】
次に、コントローラ6のジョイスティック6bを適宜操作しながら挿入部2を観察部位に向けて挿入していく。前記ジョイスティック6bを操作することによって、電動湾曲回路部22を介してモータユニット80が回転動作して湾曲部2bが湾曲動作する。そして、検査を実施する。
【0055】
検査終了後は、引き出した挿入部2をドラム部4に巻き付け、その後使用したコントローラ6をケース本体5a内に戻し、電源スイッチ9をOFFにする。このことによって検査作業は終了し、蓋体5bを閉じることによって検査完了となるとともに、内視鏡システム1は保管状態になる。
【0056】
このように、ドラム部の内部空間に電動湾曲ユニット、電動湾曲回路部、CCU、光源部、電源ユニットを配設するとともに、ドラム部をケース本体に対して回動自在に配置して内視鏡システムを構成したことにより、工業用内視鏡に備えられている長尺の挿入部をドラム部の管状部材に巻きとって工業用内視鏡及び各周辺機器をコンパクトに収納して可搬性を大幅に向上させることができる。
【0057】
また、挿入部内を挿通する信号線やライトガイドが予めCCU及び光源部に接続されているため、検査準備作業を簡略にして取扱い性を大幅に向上させることができる。
【0058】
さらに、ドラム部の内部空間を体積の異なる2つの空間部に分割し、モータユニットを体積の小さな空間部に配置し、このときモータユニットの先端部を管状部材の内周曲面に向けて傾けて配置したことにより、ドラム部の内部空間を有効に利用して電動湾曲ユニットの小型化を実現することができる。
【0059】
このことにより、ドラム部全体の小型化を図って、内視鏡システムとしての小型化を実現して、さらなる可搬性の向上及び取扱い性の向上が可能になる。
【0060】
又、ベース本体を管状部材に対して接続部を設けて固定することによって円弧面からなる曲面部が管状部材の内周面に固定されることで、このベース本体がドラム部を構成する新たな補強部材となるので、ドラム部の径方向の強度を向上させることができる。
【0061】
なお、前記ベース本体30の取付け方法は図4に示した実施形態に限定されるものではなく例えば図9に示すようにを管状部材41にではなく、上面板43又は下面板44の一方に支柱63を立設させ、この支柱63の一端面にベース本体30を設置し、ビス固定、溶接、接着、係合等のいずれかの固定方法によって固定するようにしてもらい。このとき、曲面部30aを管状部材41の内周面に密接させるようにしてもよい。このことにより、上述と同様の作用及び効果を得ることができる。
【0062】
また、前記ベース本体30の外形形状は略D字形状に限定されるものではなく、前記支柱63の一端面に固定する場合には、図10に示すようにベース本体30Aを電動湾曲ユニット21として必要最小限の大きさである例えば長方形形状に形成するようにしてもよい。このことによって、ベース本体30Aの軽量化を図ることができるので、さらなる可搬性の向上を図れる。
【0063】
なお、このベース本体30Aの場合には、ベース本体30Aの辺部と管状部材41の内周面との間に隙間部が形成されるので、この隙間部を通じて電動湾曲回路部等にアクセスすることが可能になる。このため、リペア時のコネクタの付け替えや基板修理等の作業性を向上させることができる。なお、図11に示すようにドラム部4を構成する上面板43又は下面板44の少なくとも一方にリペア時のコネクタの付け替えや基板修理等の作業性を向上させる目的で開口部29を設けるようにしてもよい。
【0064】
さらに、前記長方形形状に形成したベース本体30Aの代わりに図12に示すように両短辺を前記管状部材41の内周面に沿う円弧部66を有するベース本体30Bとしてもよい。そして、このベース本体30Bの円弧部66と管状部材41とを接続部61を設けて固定する。このことによって、ベース本体30Bの軽量化及び作業性の向上図ることができるとともに、ベース本体30Bをドラム部4の補強部材として利用することができる。
【0065】
又、図13に示すように長さが異なる等の理由でモータユニット80A,80Bが異なる形状の場合には、モータユニット80A,80Bの配置する際の角度θ1と角度θ2とを異なる角度に設定して配置することによって、ドラム部の内部空間を有効に利用することが可能である。
【0066】
図14及び図15は本発明の第2実施形態に係り、図14は内部空間に内蔵物を配置したドラム部を説明する図、図15はドラム部の内部空間の構成と、空間部に配置された内蔵物の配置構成を説明する図である。
【0067】
図14に示すように本実施形態においては、電動湾曲ユニット21を構成するベース本体30Cを前記管状部材41の中心軸に対して平行に配置している。つまり、前記第1実施形態のベース本体30と90度傾いた位置関係になっている。
【0068】
そして、図に示すように前記ベース本体30Cを配置したとき、図15に示すように、内部空間10を第1の空間部11と第2の空間部12とに分割し、モータユニット80が第2空間部12に位置するよう、ベース本体30Cを配設する。
【0069】
なお、このとき第1空間部11と第2空間部12との分割はベース本体30Cによって行う。また、前記ベース本体30Cは、下面板44或いは上面板43又は管状部材41に対して、上述した実施形態で示したように接続部61を介して固定されている。その他の構成は前記第1実施形態同様であり、同部材には同符合を付して説明を省略する。
【0070】
このように、モータユニットと電動湾曲回路部とが隣接することによって、配線作業性を大幅に向上させることができる。その他の作用及び効果は上述した実施形態と同様である。
【0071】
なお、前記電動湾曲回路部22,CCU23,光源部24,電源ユニット25は上述した実施形態の図面上の配置位置に留まらず、第1の空間部11内にドラム部4の径寸法や厚み寸法を大きくしない範囲で配置すればよいものとする。
【0072】
また、光源部から遠ざかる方向にモータユニットを配することによって、光源部の熱による影響を軽減することができる。
【0073】
さらに、ベース本体を円板部材又は管状部材に固定することによって、このベース本体に取り付けられているモータユニットから発生する熱の放熱性が向上して、モータユニットの熱による悪影響を軽減することができる。
【0074】
上記実施形態において、前記モータユニット80をすべて第2の空間部12内に収納するようにモータユニット80を配置しているが、モータユニット80の一部が第2の空間部12に含まれるように配置しても良いことは勿論である。
【0075】
又、前記支持部材51を図16に示すように左右非対称でかつ、挿入部2の基端側の開口において、片側方向に偏心させることによって、案内管50を開口付近で片側に寄せることができる。このことによって、空いたスペースを利用してベース本体30より側方へ,ライトガイドを延出させやすくなる。
【0076】
なお、本発明は、以上述べた実施形態のみに限定されるものではなく、発明の要旨を逸脱しない範囲で種々変形実施可能である。
【0077】
[付記]
以上詳述したような本発明の上記実施形態によれば、以下の如き構成を得ることができる。
【0078】
(1)細長な挿入部を有する内視鏡と、
この内視鏡の挿入部を巻回する外周面を有するドラム部と、
このドラム部の内部空間に収納され、前記挿入部の先端側に設けられている湾曲部を駆動させる駆動源及びこの駆動源が設置されるベース本体を備えた電動湾曲ユニットとを有する内視鏡システムにおいて、
前記ドラム部の内部空間を異なる体積の第1の空間部と第2の空間部との2つに分割し、
前記駆動源の少なくとも一部を、前記2つの空間部のうち、体積の小さな空間部内に配置した内視鏡システム。
【0079】
(2)前記電動湾曲ユニットを構成する前記駆動源によって操作される湾曲操作部材と前記駆動源とは所定の角度傾いた位置関係で配置される付記1記載の内視鏡システム。
【0080】
(3)前記駆動源は、配置された空間部を構成する内周曲面に向けて突出する付記1記載の内視鏡システム。
【0081】
(4)前記駆動源は、モータ及び減速機で構成されるモータユニットである付記1記載の内視鏡システム。
【0082】
(5)前記減速機は、軸を直交方向に変換する直交ギヤヘッドを有する付記4記載の内視鏡システム。
【0083】
(6)前記モータユニットは、長手方向に対して直交する向きに出力軸を延出している付記4記載の内視鏡システム。
【0084】
(7)前記電動湾曲ユニットは、少なくとも前記モータユニットと、このモータユニットの出力軸の回動と連動して回動する回動盤と、この回動盤の回転運動を直線運動に直接的又は間接的に湾曲部を牽引動作させる湾曲操作部材と、前記回動盤の回転位置を検知するセンサ部と、前記モータユニット、回動盤、湾曲操作部材、センサ部を保持するベース本体とで構成される付記1記載の内視鏡システム。
【0085】
(8)前記回動盤は、スプロケットである付記7記載の内視鏡システム。
【0086】
(9)前記湾曲操作部材は、前記スプロケットに噛合するチェーンである付記7記載の内視鏡システム。
【0087】
(10)前記センサ部は、ポテンショメータである付記7記載の内視鏡システム。
【0088】
(11)前記センサ部は、エンコーダである付記7記載の内視鏡システム。
【0089】
(12)前記モータは、DCモータである付記4記載の内視鏡システム。
【0090】
(13)前記第1の空間部と前記第2の空間部とは、断面部に同一の弦を含む面を有し、円弧の長さの違いによって体積の異なる2つの空間部を形成する付記1記載の内視鏡システム。
【0091】
(14)前記ベース本体の一面にモータユニット、センサ部を配置し、他面に回動盤、湾曲操作部材を配置した付記7記載の内視鏡システム。
【0092】
<320218のコンバイン分>
(15)前記ベース本体は、前記ドラム部の内部空間内に配置され、ドラム部を構成する内周曲面と同一又は相似形の曲面部を有する略D字形状である付記7記載の内視鏡システム。
【0093】
(16)前記ベース本体は、前記ドラム部の内部空間内に配置され、ドラム部を構成する内周曲面と同一又は相似形の曲面部を少なくとも一部に有する付記7記載の内視鏡システム。
【0094】
(17)前記ベース本体は、前記ドラム部の強度を保持する強度保持部材を兼ねる付記15又は付記16記載の内視鏡システム。
【0095】
(18)前記ベース本体の一面に電動湾曲動作を制御する回路基板部を配し、このベース本体に前記回路基板部にアクセス自在となる開口を設けた付記7記載の内視鏡システム。
【0096】
(19)前記ベース本体に、前記センサ部及びモータユニットの端子にアクセス自在となる開口を設けた付記7記載の内視鏡システム。
【0097】
(20)前記ベース本体は、アルミニウム部材である付記7記載の内視鏡システム。
【0098】
(21)前記ベース本体は、アルマイト処理が施されている付記7記載の内視鏡システム。
【0099】
(22)前記ドラム部は、管状部材と、この管状部材の上下の開口を閉鎖する円板部材とで構成され、
前記ベース本体を管状部材に接続部を介して一体的に固定した付記7記載の内視鏡システム。
【0100】
(23)前記ドラム部は、管状部材と、この管状部材の上下の開口を閉鎖する円板部材とで構成され、
前記ベース本体を円板部材に接続部を介して一体的に固定した付記7記載の内視鏡システム。
【0101】
【発明の効果】
以上説明したように本発明によれば、可搬性及び取扱い性を向上させるとともに、小型化を図り、かつ長尺スコープでも湾曲性能の良好な湾曲駆動装置を備えた内視鏡システムを提供することができる。
【図面の簡単な説明】
【図1】図1ないし図8は本発明の一実施形態に係り、内視鏡システムの概略構成を説明する図
【図2】内部空間に内蔵物を配置したドラム部を説明する図
【図3】電動湾曲ユニットを構成するベース本体を示す図
【図4】ベース本体の配置固定例を示す図
【図5】モータユニットを説明する図
【図6】ドラム部の内部空間の構成と、空間部に配置された内蔵物の配置構成を説明する図
【図7】電動湾曲ユニットの構成を説明する図
【図8】ベース本体に設けられる方向変換手段の構成を説明する図
【図9】内部空間に配置されるベース本体の他の取付け方法を説明する図
【図10】ベース本体の他の構成例を説明する図
【図11】ベース部に作業性向上の目的の開口部を設けた構成例を示す図
【図12】ベース本体の別の構成例を説明する図
【図13】異なる形状のモータユニットのベース本体への配置例を説明する図
【図14】図14及び図15は本発明の第2実施形態に係り、図14は内部空間に内蔵物を配置したドラム部を説明する図
【図15】ドラム部の内部空間の構成と、空間部に配置された内蔵物の配置構成を説明する図
【図16】支持体の構成例を説明する図
【符号の説明】
4…ドラム部
10…内部空間
11…第1空間部
12…第2空間部
21…電動湾曲ユニット
30…ベース本体
41…管状部材
80…モータユニット
Claims (9)
- 細長な挿入部に湾曲部を有する内視鏡と、この内視鏡の挿入部が巻回される外周面部を備えた管状部材を有し、収納ケースに回動自在に収納されるドラム部と、このドラム部の内部空間に固定されるベース本体の一面側に配置された、前記湾曲部から延出された湾曲操作ワイヤを電動で牽引動作させて該湾曲部を湾曲させる電動湾曲ユニットと、を有する内視鏡システムにおいて、
前記電動湾曲ユニットは、
駆動力を発生させる駆動源となるモータ部材と、
前記モータ部材からの出力を当該モータ部材のモータ軸に対して直交する方向に変換する出力軸を備えた直交ギヤヘッドと、
前記出力軸に配置されて前記湾曲操作ワイヤの端部が接続されたチェーンを移動させる回動盤と、を有して構成される長軸体のモータユニットを備え、
前記モータユニットは、前記直交ギヤヘッドの出力軸を該ベース本体の一面側に突出させ、且つ、前記モータ部材の先端部を前記湾曲操作ワイヤと前記チェーンとが接続された接続部方向に位置する前記管状部材の内周曲面に向けて、前記ベース本体の他面側に配置されたことを特徴とする内視鏡システム。 - 前記モータユニットは、減速機を有することを特徴とする請求項1に記載の内視鏡システム。
- 前記ベース本体は、前記ドラム部を構成する内周曲面と同一又は相似形の曲面部を少なくとも一部に有するD字形状、又は、長方形形状であることを特徴とする請求項1又は請求項2に記載の内視鏡システム。
- 前記ドラム部は、前記管状部材とこの管状部材の上下の開口を閉鎖する円板部材とで構成され、
前記ベース本体は、前記管状部材に接続部を介して一体的に固定されたことを特徴とする請求項1に記載の内視鏡システム。 - 前記ドラム部は、前記管状部材とこの管状部材の上下の開口を閉鎖する円板部材とで構成され、
前記ベース本体は、前記円板部材に接続部を介して一体的に固定されたことを特徴とする請求項1に記載の内視鏡システム。 - 前記ベース本体の他面側に、上下湾曲用モータユニット及び左右湾曲用モータユニットを設けたことを特徴とする請求項1乃至請求項5の何れか1項に記載の内視鏡システム。
- 前記上下湾曲用モータユニットの前記モータ部材のモータ軸の、前記上下湾曲用モータユニットの出力軸の中心と前記左右湾曲用モータユニットの出力軸の中心とを結ぶ直線に対する傾き角度と、前記左右湾曲用モータユニットの前記モータ軸の前記直線に対する傾き角度とが同一であることを特徴とする請求項6に記載の内視鏡システム。
- 前記上下湾曲用モータユニットの前記モータ部材のモータ軸の、前記上下湾曲用モータユニットの出力軸の中心と前記左右湾曲用モータユニットの出力軸の中心とを結ぶ直線に対する傾き角度と、前記左右湾曲用モータユニットの前記モータ軸の前記直線に対する傾き角度とが異なることを特徴とする請求項6に記載の内視鏡システム。
- 前記ドラム部の内部空間内に、さらに、照明光を供給する光源部と、電源を供給する電源ユニットとを設ける構成において、
前記ドラム部の内部空間を、前記モータユニットの少なくとも一部が配置される第1の空間部と、前記光源部及び前記電源ユニットが配置される前記第1の空間部に対して体積が大きな第2の空間部とに分割したことを特徴とする請求項1乃至請求項8の何れか1項に記載の内視鏡システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP24006399A JP4464493B2 (ja) | 1999-08-26 | 1999-08-26 | 内視鏡システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP24006399A JP4464493B2 (ja) | 1999-08-26 | 1999-08-26 | 内視鏡システム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2001061763A JP2001061763A (ja) | 2001-03-13 |
| JP2001061763A5 JP2001061763A5 (ja) | 2006-10-12 |
| JP4464493B2 true JP4464493B2 (ja) | 2010-05-19 |
Family
ID=17053944
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP24006399A Expired - Fee Related JP4464493B2 (ja) | 1999-08-26 | 1999-08-26 | 内視鏡システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4464493B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006116150A (ja) * | 2004-10-22 | 2006-05-11 | Olympus Corp | 内視鏡装置 |
| JP5289781B2 (ja) * | 2007-05-28 | 2013-09-11 | オリンパス株式会社 | 内視鏡装置 |
-
1999
- 1999-08-26 JP JP24006399A patent/JP4464493B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2001061763A (ja) | 2001-03-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4323149B2 (ja) | 電動湾曲内視鏡 | |
| US8142346B2 (en) | Endoscope with electromagnetic wave shield | |
| US20080154089A1 (en) | Electronic Bending Endoscope Device and Endoscope Supporting Device | |
| US8491466B2 (en) | Intraductal insertion device | |
| JP2000089131A (ja) | 電子内視鏡装置 | |
| JP3954354B2 (ja) | 内視鏡装置 | |
| JP4526284B2 (ja) | 内視鏡装置 | |
| JP4464493B2 (ja) | 内視鏡システム | |
| JPWO2019031018A1 (ja) | 内視鏡 | |
| JP4477332B2 (ja) | 携帯型内視鏡装置 | |
| JP3730720B2 (ja) | 内視鏡装置用収納ケース | |
| JPH05309066A (ja) | 内視鏡装置 | |
| KR102343866B1 (ko) | 수술용 로봇 구동 장치 | |
| JP3954355B2 (ja) | 内視鏡装置 | |
| JP2001228410A (ja) | 内視鏡装置 | |
| JP4500310B2 (ja) | 挿入装置、及び内視鏡システム | |
| JP2005218569A (ja) | 内視鏡装置 | |
| JP4783462B2 (ja) | 内視鏡装置の収納ケース | |
| JP4520194B2 (ja) | 内視鏡 | |
| JP4647904B2 (ja) | 内視鏡装置 | |
| JP3971400B2 (ja) | 内視鏡装置 | |
| JP4575110B2 (ja) | 内視鏡装置 | |
| CN117898656A (zh) | 柔性可控器械拉线的张紧装置 | |
| JP2005168672A (ja) | 内視鏡装置 | |
| JPH02114929A (ja) | 内視鏡の湾曲操作装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060825 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060825 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090915 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20091113 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100126 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100219 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130226 Year of fee payment: 3 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4464493 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140226 Year of fee payment: 4 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |