JP4428477B2 - ビームフォーミング用時間遅延及びアポダイゼーション値の敏速な分散型計算のための方法及び装置 - Google Patents
ビームフォーミング用時間遅延及びアポダイゼーション値の敏速な分散型計算のための方法及び装置 Download PDFInfo
- Publication number
- JP4428477B2 JP4428477B2 JP2000592816A JP2000592816A JP4428477B2 JP 4428477 B2 JP4428477 B2 JP 4428477B2 JP 2000592816 A JP2000592816 A JP 2000592816A JP 2000592816 A JP2000592816 A JP 2000592816A JP 4428477 B2 JP4428477 B2 JP 4428477B2
- Authority
- JP
- Japan
- Prior art keywords
- codec
- function
- time delay
- coordinate
- apodization
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images







Classifications
-
- G—PHYSICS
- G10—MUSICAL INSTRUMENTS; ACOUSTICS
- G10K—SOUND-PRODUCING DEVICES; METHODS OR DEVICES FOR PROTECTING AGAINST, OR FOR DAMPING, NOISE OR OTHER ACOUSTIC WAVES IN GENERAL; ACOUSTICS NOT OTHERWISE PROVIDED FOR
- G10K11/00—Methods or devices for transmitting, conducting or directing sound in general; Methods or devices for protecting against, or for damping, noise or other acoustic waves in general
- G10K11/18—Methods or devices for transmitting, conducting or directing sound
- G10K11/26—Sound-focusing or directing, e.g. scanning
- G10K11/34—Sound-focusing or directing, e.g. scanning using electrical steering of transducer arrays, e.g. beam steering
- G10K11/341—Circuits therefor
- G10K11/346—Circuits therefor using phase variation
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/89—Sonar systems specially adapted for specific applications for mapping or imaging
- G01S15/8906—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques
- G01S15/8993—Three dimensional imaging systems
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/52017—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00 particularly adapted to short-range imaging
- G01S7/52046—Techniques for image enhancement involving transmitter or receiver
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F7/00—Methods or arrangements for processing data by operating upon the order or content of the data handled
- G06F7/38—Methods or arrangements for performing computations using exclusively denominational number representation, e.g. using binary, ternary, decimal representation
- G06F7/48—Methods or arrangements for performing computations using exclusively denominational number representation, e.g. using binary, ternary, decimal representation using non-contact-making devices, e.g. tube, solid state device; using unspecified devices
- G06F7/544—Methods or arrangements for performing computations using exclusively denominational number representation, e.g. using binary, ternary, decimal representation using non-contact-making devices, e.g. tube, solid state device; using unspecified devices for evaluating functions by calculation
- G06F7/5446—Methods or arrangements for performing computations using exclusively denominational number representation, e.g. using binary, ternary, decimal representation using non-contact-making devices, e.g. tube, solid state device; using unspecified devices for evaluating functions by calculation using crossaddition algorithms, e.g. CORDIC
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F7/00—Methods or arrangements for processing data by operating upon the order or content of the data handled
- G06F7/38—Methods or arrangements for performing computations using exclusively denominational number representation, e.g. using binary, ternary, decimal representation
- G06F7/48—Methods or arrangements for performing computations using exclusively denominational number representation, e.g. using binary, ternary, decimal representation using non-contact-making devices, e.g. tube, solid state device; using unspecified devices
- G06F7/544—Methods or arrangements for performing computations using exclusively denominational number representation, e.g. using binary, ternary, decimal representation using non-contact-making devices, e.g. tube, solid state device; using unspecified devices for evaluating functions by calculation
- G06F7/552—Powers or roots, e.g. Pythagorean sums
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Theoretical Computer Science (AREA)
- Remote Sensing (AREA)
- Mathematical Analysis (AREA)
- Acoustics & Sound (AREA)
- Computational Mathematics (AREA)
- Pure & Applied Mathematics (AREA)
- Computing Systems (AREA)
- Computer Networks & Wireless Communication (AREA)
- Mathematical Optimization (AREA)
- General Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Measurement Of Velocity Or Position Using Acoustic Or Ultrasonic Waves (AREA)
- Ultra Sonic Daignosis Equipment (AREA)
- Investigating Or Analyzing Materials By The Use Of Ultrasonic Waves (AREA)
- Image Processing (AREA)
- Closed-Circuit Television Systems (AREA)
- Transducers For Ultrasonic Waves (AREA)
Description
【発明の分野】
本発明は一般的には、フェーズド・アレイ型アンテナを応用したコヒーレントなイメージング方法に関する。具体的には、本発明は、超音波イメージング・システムに用いられるビームフォーミング(ビーム形成)手法に関する。
【0002】
【発明の背景】
医用超音波システムは、個々の超音波線(又はビーム)を取得することにより画像を形成する。これらの線は互いに隣接しており、イメージングされるべき目標区域を網羅している。各々の線は、特定の空間的方向に超音波パルスを送信すると共にこの方向から反射したエコーを受信することにより形成される。送信波の空間的特性及び受信感度の特性が、超音波画像の品質を決定する。超音波線は、所期の方向からの目標情報のみを収集し、他の方向に位置する目標を無視していることが望ましい。
【0003】
従来の超音波イメージング・システムは超音波トランスデューサ素子のアレイを含んでおり、これらの素子を用いて超音波ビームを送信し、次いで、被検体から反射したビームを受信する。このような走査は、集束した超音波を送信し、短時間の後にシステムが受信モードに切り換わり、反射した超音波を受信し、ビームフォーミングし、処理して表示するという一連の測定を含んでいる。典型的には、送信及び受信は、各回の測定中には同じ方向に集束しており、音波ビーム又は走査線に沿った一連の点からデータを取得する。受信器は、反射した超音波が受信されるのに伴って、走査線に沿った一連のレンジ(距離)に動的に集束する。
【0004】
超音波イメージングの場合には、アレイは典型的には、1つ又はこれよりも多い行を成して配列されており別個の電圧で駆動される多数のトランスデューサを有している。印加電圧の時間遅延(又は位相)及び振幅を選択することにより、所与の行内の個々のトランスデューサ素子を制御して超音波を形成し、これらの超音波を組み合わせて、好ましいベクトル方向に沿って走行しており且つビームに沿って選択されたゾーンに集束している正味の超音波を形成することができる。各回のファイアリング(firing)でのビームフォーミング用パラメータを変化させると、例えば、各々のビームの焦点ゾーンを前回のビームの焦点ゾーンに対してシフトさせた状態で同じ走査線に沿って連続したビームを送信することにより、最大焦点に変化を与えることもできるし、他の場合には、各回のファイアリング毎に受信データの内容を変化させることもできる。フェーズド・アレイの場合には、印加電圧の時間遅延及び振幅を変化させることにより、ビームをその焦点ゾーンについて平面内で移動させて物体を走査することができる。リニア・アレイの場合には、1回のファイアリングから次回のファイアリングにかけてアレイを横断するようにアパーチャ(開口)を平行移動させることにより、アレイに垂直な方向を向いた集束したビームで物体を横断して走査する。
【0005】
受信モードでトランスデューサ・プローブを用いて反射音を受信する場合にも同じ原理を適用することができる。受信を行うトランスデューサ素子において発生する電圧は、正味の信号が物体内の単一の焦点ゾーンから反射した超音波を示すものになるように加算される。送信モードの場合と同様に、この超音波エネルギの集束式受信は、各々の受信用トランスデューサ素子からの信号に別個の時間遅延(及び/又は位相シフト)並びにゲイン(利得)を与えることにより達成される。時間遅延を帰投信号の深さが増すと共に調節して、受信時の動的集束(ダイナミック・フォーカシング)を行うことができる。
【0006】
典型的な超音波システムにおいては、ビームフォーマの制御がシステムの性能及び経費に対する重要な寄与因子となっている。動的受信時の遅延制御値及びアポダイゼーション制御値は、各々のビーム及び各々のチャネル毎に高速で生成されなければならない。更新速度が10MHzと高速なハイ・エンド・システムには、しばしば512ものビーム・チャネルが要求される。動的受信中に超音波ビームフォーマ用の遅延及びアポダイゼーションを計算するのには、超越関数を含む複雑な計算が必要である。通常、画質は、これらの関数に対して2次又は3次の近似を用いることにより経費との折り合いを付けている。加えて、予め定められているビーム位置及びパラメータについて予備計算された制御値を記憶するために、多量のメモリが用いられることがしばしばである。記憶されている予備計算値を用いると、走査状況に応じてビーム位置又はパラメータを最適に再調節するシステムの能力が制限される。このように、相対的に高速な制御応答時間を達成するために画質が代償にされる。
【0007】
現状用いられているビームフォーマ制御設計には多様な種類がある。全ての設計が、大容量のパラメータ用ランダム・アクセス・メモリ(RAM)、状態機械(state machine) 、複雑な計算及び近似を何らかの組み合わせで用いている。このように、これらの設計は、1つ又はこれよりも多い領域、すなわち敏速さ、経費又は精度の点で不十分である。
【0008】
敏速さ(agility) とは、画像化構成全体についてのビームフォーミング設定を1秒よりも遥かに短い時間で変更する能力を意味している。ここで、設定には、ベクトル位相中心(アパーチャ)の位置、方向操作(steering)角、fナンバ及び焦点位置が含まれており、画像化構成にはイメージング・コンソール上に表示される全てのベクトル(ビーム)が含まれている。敏速さはまた、中間距離において、すなわち深い関心領域の直前に、受信遅延計算を開始する能力を意味している。
【0009】
多くの特許に記載されているコントローラ類は、状態機械を利用している。残念ながら、これらの状態機械は、送信の直後に稼働を開始しなければならない。これらの機械は、送信のかなり後になると異なる受信焦点のために容易にリロードされ得ない。フレーム・レートが高い用途の場合、特に立体イメージングの場合には、深い関心領域からのエコーが受信される直前に受信を開始することが望ましい。加えて、少なくとも1つの従来方法は、ビームと素子とに依存したパラメータを用いている。これにより、平方根及び正弦関数等の関数を含めた極めて多数のパラメータが生ずる。このようにして、敏速さを達成することが不可能になる。
【0010】
内在的な近似を含んでいる他のシステムもあり、ビームフォーミング用時間遅延の精度が制限されている。これにより、画質に損失が生じ、このことは、不十分なコントラスト分解能、すなわち組織反射の強度又は嚢胞掃去(cystic clearing) における非常に微妙な差を検出する能力が不十分であることに最も頻繁に現われている。
【0011】
より精密なシステムは、複雑なロジックを用いて所要の計算を行う。これらの回路はチャネルの数に応じて複製されなければならないので、チャネル数の多いシステムの経費のうちかなりの部分に相当するものとなり得る。
【0012】
予め計算されたビームフォーミング用の値を記憶する大容量メモリを必要とせずに、いかなる幾何形状のトランスデューサ・アレイでも同等に良好に動作し、敏速で精密且つ低経費の新たなビームフォーミング・アーキテクチャが必要とされている。
【0013】
【発明の概要】
本発明は、コーディック(cordic)回転器(以下「コーディック」と呼ぶ)を用いることにより実時間でビームフォーマ用時間遅延及びアポダイゼーション値を算出するアーキテクチャである。コーディック回転器は、極座標−デカルト座標変換に用いられる乗算器を含まない単純な装置である。近似又は複雑なロジックを用いずに自乗和の平方根を直接計算するコーディックを用いることにより、低経費で理想的な性能及び柔軟性が得られる。このシステムは、大容量の予め記憶されているメモリを再計算したり粗い近似を用いたりする必要性なしに、ビーム位置及びパラメータを迅速に再最適化することができる。
【0014】
本発明の好適実施例によれば、超音波ビームフォーミング用アポダイゼーション加重(重み付け)及び時間遅延を算出する極めて敏速で効率的且つ精密な方法及び手段としてコーディック回転器が用いられる。アポダイゼーション加重及び時間遅延は、大容量のメモリ又は複雑な状態機械の必要性なしに、実時間で分散型且つパイプライン式の態様で算出される。内在的な近似も存在しない。精度は、遅延装置の精度の範囲内になるように容易に制御することができる。超音波イメージング・システムにトランスデューサ・アレイが取り付けられると、素子位置が比較的小容量の分散型メモリに書き込まれる。素子位置は、アレイの幾何形状が変更される場合以外にはリロードされる必要はない。イメージング時には、各回の送信の前及び各回の受信中に少数のパラメータが同報通知される。これらのパラメータは、焦点位置、マルチプレクサ状態、アパーチャ位置、アパーチャ・サイズ及びベクトル角度を含み得る。コーディックを含む単純なロジックによりこれらのパラメータを組み合わせて、ビームフォーミング用時間遅延及びアポダイゼーションを生成する。焦点位置及びアパーチャは、画像全体についてミリ秒単位で極めて迅速に変更可能である。受信焦点位置は、状態機械でのアプローチによって要求されるように表層線(skin-line) で開始する必要はないし、又は直線に沿っている必要もない。受信集束を中間距離で開始して、平行ビームフォーミング方法を補償するようにワープさせることができる。加えて、アレイの幾何形状は如何なる形態を取っていてもよく、従来のリニア・アレイ、コンベクス(convex)アレイ及びフェーズ・アレイに限定されない。
【0015】
【好適実施例の詳細な説明】
本発明は、ビームフォーミングを採用している任意の超音波イメージング・システムに組み込むことができる。上述のようなシステムの一例は、Bモード超音波イメージング・システムであり、本発明の好適実施例を詳細に開示する前にこのシステムについて全般的に記載する。
【0016】
従来のBモード超音波イメージング・システムを図1に全体的に示す。このシステムは、別個に駆動される複数のトランスデューサ素子34から成るトランスデューサ・アレイ2を含んでおり、トランスデューサ素子34の各々は、送信器8によって発生されるパルス型波形であって、送信状態に切り換えられた1組の送信/受信(T/R)スイッチ6及びMUX状態に切り換えられたマルチプレクサ4のそれぞれのスイッチを介して送信されるパルス型波形によってエネルギを与えられると、超音波エネルギのバーストを発生する。被検体から反射されてトランスデューサ・アレイ2に帰投した超音波エネルギは、受信を行う各々のトランスデューサ素子34によって電気信号へ変換されて、MUX状態に切り換えられたマルチプレクサ・スイッチ4及び受信状態に切り換えられたT/Rスイッチ6を介して受信ビームフォーマ10に別個に印加される。送信器8及び受信ビームフォーマ10は、ホスト・コンピュータ(マスタ・コントローラ)24の制御の下で動作する。1回の完全な走査は、送信器8が瞬間的にオンにゲート制御されて送信アパーチャ内の各々のトランスデューサ素子34にエネルギを与え、各々のトランスデューサ素子34によって発生された後続のエコー信号が受信ビームフォーマ10に印加されるといった一連のエコーの取得により行われる。受信ビームフォーマ10は、各々のトランスデューサ素子34からの別個のエコー信号を組み合わせて単一のエコー信号を発生し、この単一のエコー信号を用いて表示モニタ22上に画像の1本の線を形成する。
【0017】
受信ビームフォーマの信号入力は、トランスデューサ素子34からの低レベルのアナログRF信号である。受信ビームフォーマは、アナログからディジタルへの変換及び受信ビームフォーミングを受け持つ。ベースバンド式イメージング・システムにおいては、ビーム加算された信号は復調器12へ出力され、復調器12はビーム加算された信号をベースバンドの同相のI受信ビーム及び直角位相のQ受信ビームへ変換する。復調器12からのI及びQの音波データ・ベクトルは、好ましくは送信波形の基本周波数f0 又は送信波形の高(若しくは低)調波周波数に中心を有する周波数の帯域を通過させるようなフィルタ係数でプログラムされているそれぞれのFIRフィルタ14へ送られる。
【0018】
Bモード・イメージング・システムの場合には、フィルタ処理されたI及びQ音波データのベクトルはBモード・プロセッサ16へ送られ、Bモード・プロセッサ16はI及びQの音波データを信号包絡線の対数圧縮された形態へ変換する。Bモード機能は、信号の包絡線の時間変化する振幅をグレイ・スケールとして画像化する。ベースバンド信号の包絡線は、I及びQが表わしているベクトルの大きさである。I及びQの位相角はBモード表示には用いられない。信号の大きさ(すなわち強度)は、直交する成分の自乗和の平方根であり、すなわち(I2 +Q2 )1/2 である。
【0019】
Bモード振幅データは、音線メモリと、この後にXY表示メモリとを含んでいるスキャン・コンバータ18に出力される。音線メモリは、処理済の振幅データのベクトルを受け取って、必要があれば補間し、また、極座標(R−θ)のセクタ・フォーマット又はデカルト座標のリニア・フォーマットから、適当にスケーリングされたデカルト座標の表示ピクセル強度データへの振幅データの座標変換を行う。変換後の表示ピクセル強度データはXY表示メモリに記憶される。
【0020】
スキャン・コンバート(走査変換)されたフレームがビデオ・プロセッサ20へ渡されると、ビデオ・プロセッサ20はピクセル強度データをビデオ・フレーム・レートへ変換した後に、ピクセル強度データをビデオ表示用のグレイ・スケール・マップにマッピングする。従来の超音波イメージング・システムは典型的には、生の強度データから表示用グレイ・スケール・レベルへの単純な伝達関数である多様なグレイ・マップを採用している。次いで、グレイ・スケール画像フレームは表示モニタ22へ送られて表示される。
【0021】
図1に示すシステムによって形成される超音波画像は、多数の画像走査線で構成されている。単一の走査線(又は走査線の局在化した小群)は、関心領域内の1つの点に集束した超音波エネルギを送信し、次いで、反射したエネルギを時間にわたって受信することにより取得される。集束した送信エネルギを送信ビームと呼ぶ。送信後の時間中に、1つ又はこれよりも多い受信ビームフォーマが、各々のチャネルによって受信されたエネルギを位相回転又は遅延を動的に変化させながらコヒーレントに加算して、経過時間に比例したレンジにおける所望の走査線に沿ったピーク感度を形成する。得られた集束した感度パターンを受信ビームと呼ぶ。走査線の分解能は、関連する送信ビームと受信ビームとの対の指向性の結果となる。
【0022】
ビームフォーマ(ビーム形成装置)の目的は、空間内の望ましい焦点においては最大の送信強度及び受信感度を有し、焦点から離れた位置では最小の強度又は感度を有するようにすることにある。このために、ビームフォーマは、焦点とトランスデューサ・アレイの各素子との間での音波の伝播時間の差に対応する時間遅延を正確に算出しなければならない。典型的には、受信ビームフォーミング用時間遅延は、受信中に動的に調節される。これにより、焦点が受信エコーを発生している物体の深さを追尾することが可能になる。この深さは、送信からの時間に比例している。
【0023】
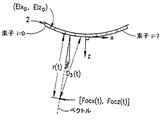
図2に典型的なトランスデューサ・アレイの幾何形状を示す。この例では、アレイの素子及び焦点は全て、3次元空間内の単一の平面内に位置している。従って、この幾何形状を2次元すなわちx及びzで記述することができる。ここで、x軸はアレイ面の中心に接しており、z軸はx軸に直交している。アレイ内の各素子は、文字「i」によってインデクスを割り振られている。各々のi番目の素子の位置は、x(アジマス;方位角方向)及びz(アキシャル;軸方向)におけるその座標、すなわち、Elxi 及びElzi によって示される。焦点が位置しているベクトルは、z軸に対する角度βによって記述することができる。焦点の位置は、時間の関数として、座標Focx(t)及びFocz(t)によって示される。すると、ピタゴラスの定理により、伝播経路長Di(t) は、
Di(t)=hypot[(Elxi−Focx(t)),(Elzi−Focz(t))] (1)
となる。ここで、hypot(x,y)は2つの直交する長さの斜辺(hypotenuse)を算出する関数であり、次のように定義される。
【0024】
hypot(x,y)≡(x2+y2)1/2 (2)
2Dアレイと呼ばれる一部のトランスデューサ・アレイは、xz平面の外部の仰角方向すなわちy方向に素子を有している。これらのアレイの場合には、幾何形状は、xz平面に直交するy軸を用いて正の方向が図1の図面平面の外部に向かうようにして拡張せねばならない。素子位置は、Elyi という追加の座標を必要とする。加えて、現在のシステムには3次元空間におけるデータを取得するものがあるが、この場合にも、焦点はxz平面の外部に位置し得る。従って、Focy(t)という追加の座標を必要とする。このようにより一般化された例では、伝播経路長Di(t) は、
Di(t)=hypot[hypot[(Elxi−Focx(t)),(Elzi−Focz(t))],
(Elyi−Focy(t))] (3)
となる。超音波イメージング・システムが走査を行っているときには、受信焦点はアレイ面上の一点から、イメージングされている空間を通る線に沿って進む。この線をベクトル又はビームと呼ぶ。ベクトルとアレイとの交点に位置しているアレイ面上の点をベクトル位相中心と呼ぶ。位相中心から焦点までの距離はr(t)となる。
【0025】
ビームフォーマは、伝播時間の差を補償するために各々のトランスデューサ素子における信号を時間Ti (t)ずつ遅延させる。伝播時間は単純に、伝播経路の距離を音速c(組織内では約1.54mm/マイクロ秒)で除算したものである。焦点は受信時には時間の関数であるので、遅延もまた時間の関数となっている。但し、位相中心における遅延は一定に維持して、ベクトルに沿った物体の深さとビームフォーマからの対応するエコー信号の出力との間に線形の関係を確保する。加えて、適用されるビームフォーミング用時間遅延が正であることを保証するためにオフセット遅延を加算する。これは、因果律を満たすための必要条件である。従って、ビームフォーミング用遅延は次の通りとなる。
【0026】
Ti(t)=Toffset+[r(t)/c]−[Di(t)/c] (4)
又は
Ti(t)=Roffset+−[Di(t)/c] (5)
ここで、
Roffset=Toffset+[r(t)/c] (6)
である。遅延に加えて、ビームフォーマは、アレイのアクティブ・アパーチャのサイズ及びシェーディング(shading) を制御するアポダイゼーション加重又はアポダイゼーション値を提供しなければならない。アポダイゼーションは、ベクトルに直交する平面へ向かってのアレイの投影に従って適用される。特定の素子についてのアポダイゼーション値は、アパーチャの中心からの投影距離を投影されるアパーチャ・サイズで除算したものによって決定される。アパーチャ・サイズ及びアパーチャ中心は、所望の実効fナンバ及び受入角(acceptance angle)に従って制御することができる。
【0027】
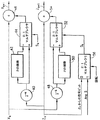
図3に示す本発明の好適実施例は、ビームフォーマの全体に分散した複数の遅延計算器28を含んでいる。各々の遅延計算器が、チャネル制御バス30を介して複数のチャネル(32)又は素子(34)にビームフォーミング用遅延及びアポダイゼーションを供給する。遅延計算器は素子位置座標で初期化されている。次いで、イメージングの間に、全ての遅延計算器に対して焦点座標及び方向操作角が同報通知される。単一のビームフォーマ制御バス26を介して全てのパラメータを遅延計算器に供給することができる。遅延計算器はコーディックを用いてアパーチャ投影を行うと共にhypot関数を計算する。コーディックは、投影を行うと共に斜辺(hypotenuse)を算出する極めて効率的且つ正確な手段を提供している。コーディックは、2の単純な羃乗である係数を用いて2次元での連続的な座標変換を行う。従って、コーディックは少数のビット・シフト及びビット加算しか必要としない。コーディックはパイプライン化されており、高いスループットを可能にする。次いで、得られたアポダイゼーション値及び時間遅延は、チャネル制御バス30によって複数のチャネル32へ供給される。
【0028】
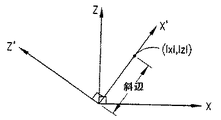
図4を参照して述べると、斜辺は、先ず座標の絶対値を取って第1象限に置き、次いで、コーディックを用いて座標をx′軸(算出すべき斜辺に整列している)上に回転させることにより計算することができ、得られたx′値を出力する。
【0029】
アポダイゼーション投影は、座標系を、z′軸がベクトルに平行になるように原点の周りに角度−βだけ単純に回転させる(図5を参照)ことにより実行され得る。すると、変換後の素子のx座標Elx′i が投影平面内での素子位置を与える。
【0030】
アポダイゼーションに必要な計算は、投影におけるアパーチャ中心ACx′から素子までの距離である。図5を参照して述べると、この距離は、
Apxi=ACx′+Elxi (7)
である。アパーチャ中心ACx′及びアパーチャ逆数iApは、全ての遅延計算器に同報通知される他のパラメータである。Apxi′とアパーチャ逆数iApとの積を用いて、シェーディング(アポダイゼーション)値の表を構成するウィンドウ関数をインデクス指定する。
【0031】
3次元での斜辺は、2つの連続したコーディックによって算出することができる。第1のコーディックがx及びzを回転した座標系x′及びz′へ変換する。次いで、第2のコーディックがx′及びyをx″及びy″へ回転させる。第1のコーディックは、斜辺をx′上へ回転させることによりxz平面での斜辺を算出し、第2のコーディックは、この時点でx′y平面に位置している斜辺をx″上へ回転させることにより3次元斜辺を算出する。同様に、アポダイゼーション投影は、先ずx軸及びz軸をy軸の周りに回転させ、次いでy軸及びx′軸をz軸の周りに回転させることにより得ることができる。
【0032】
コーディックは、図6に示すように、N個の段で構成されている。段インデクスをk=0〜N−1とすると、コーディックの各々の段36によって行われる座標変換は、
【0033】
【数2】

となり、ここで、sk =±1である。この行列の乗算は、図7に示すような2つの加減算器によって容易に実現される。この乗算から、
θk =−sk arctan(2-k) (9)
の座標回転、及び
Mk =hypot(1,2-k) (10)
倍の倍率が生ずる。N段の後の全回転は、
【0035】
【数3】
となり、全倍率は、
【0037】
【数4】
となる。図7に示すコーディックは、2つの機能を実行することができる。1つは任意の入力座標のx′軸への回転であり、もう1つは所望の角度での回転である。図7の「回転」制御信号が2つの機能のうちいずれを実行するかを選択する。
【0039】
「回転」が1に設定されている場合には、コーディックは入力に供給されるN個の符号ビットs0 〜sN-1 に対応する角度だけ入力を回転させる。これは、アポダイゼーション用に素子位置を回転された軸上に投影するのに用いられる。回転符号ビットは、ベクトル角度βに従って送信の前に算出されることができ、ビームフォーマ制御バス32(図3を参照)を介して全ての遅延計算器28へAngSとして同報通知される。
【0040】
「回転」がゼロである場合には、コーディックは座標をx′軸へ回転させて、斜辺をx′として提供する。これは、各々の段での符号ビットsk を入力zk の符号ビットとして設定することにより行われる。従って、回転の方向は常にx′軸に向かうものとなる。各々の連続した段に伴って回転の角度は小さくなり、斜辺は漸近的にx′軸に近付く。最終のx′出力は、斜辺をM倍拡大したものに等しくなり、最大残留誤差は最小角度によって決定される。
【0041】
Emax=hmax×(1−cos(θN-1))≒hmax×2-2N+1 (13)
ここで、Emax は最大残留誤差であり、hmax は最大斜辺である。最大斜辺が200マイクロ秒であり最大遅延誤差が6.25ナノ秒であるとすると、N=8段のコーディックで十分である。拡大率は一定であり、回転角度には依存しないので、入力を予め1/M倍にしておくと、正しい尺度の出力が得られる。
【0042】
本発明は、短所を皆無にして従来技術の全ての長所を提供する。本発明は、敏速であり、単純であり且つ正確である。ここにはベクトルと素子とに依存するパラメータは存在しない。ベクトル依存のパラメータは素子に依存していない。素子依存のパラメータはベクトルに依存していない。結果として生ずる少数のパラメータによって、迅速な再プログラミングが可能になる。加えて、状態機械が存在しないので、遅延計算をベクトルに沿って任意の箇所で開始することができる。コーディックは本質的にパイプライン化されており、極く単純である。コーディックは少数の加減算しか必要としない。コーディックの精度は段の数によって決定され、暗黙の近似は存在していない。
【0043】
図3に示す好適実施例によれば、遅延計算器28は、ビームフォーマ制御バス26を介して全ての所要のパラメータを受け取る。この制御バスは、少なくとも16のデータ・ビットと、13のアドレス・ビットと、「開始」ビットとを必要とする。「開始」信号は、新たなベクトルの開始のために計算器をリセットする。トランスデューサ・アレイ幾何形状パラメータは走査の前に書き込まれ、他方、ベクトル・パラメータは走査と同期して書き込まれる。動的受信の場合には、このバスは15MHzで稼働しなければならない。(二重平行ビーム受信の場合には、30MHzのバスか又は独立した複数の15MHzのバスが必要となる。)送信及び受信には、別個であるが近似的に同一の制御構造及び制御バスを用いることができる。
【0044】
トランスデューサが起動されると、素子とチャネルとの組み合わせ毎に3つの素子位置パラメータすなわち(Elxi ,Elzi ,Elyi )が必要になる。走査中に更新される8つのベクトル・パラメータが存在しており、すなわち、焦点位置(FocX,FocZ,FocY)、レンジ・オフセット(Roffset)、アパーチャ中心(ACx′)、アパーチャ・サイズの逆数(iAp)、マルチプレクサ状態(MUX状態)及びベクトル角度符号ビット(AngS)である。動的受信ビームフォーミングの場合には、最初の6つのパラメータが受信中に更新される。これらのパラメータが2.5MHzの速度で更新されるとすると、得られる2.5MHzのビームフォーミング用遅延出力を妥当な精度で線形で補間することができる。このことから、15MHzのバス速度が要求される。
【0045】
「MUX状態」は、異なる物理的素子を個々のチャネルに接続するのにマルチプレクサを用いるときに必要となる。これは、素子の数がビームフォーミング用チャネルの数を上回っているような大寸のリニア型トランスデューサ又はコンベクス型トランスデューサに典型的なものである。すると、各々の遅延チャネルに対応する素子位置は、「MUX状態」に依存するものとなる。
【0046】
各々の遅延計算器28は、それぞれのチャネル制御バス30を介してそれぞれの複数のビームフォーマ・チャネル32に遅延及びアポダイゼーション情報を出力する。16チャネルの単一ビーム用遅延計算器の場合には、このバスは、16のデータ・ビットと、5つのアドレス・ビットと、「開始」信号とを有していなければならない。遅延計算器は、チャネルによってインタリーブされている状態で遅延及びアポダイゼーション・データを出力する。チャネル当たり2.5MHzの更新が行われる場合には、16チャネルでは40MHzのバスが必要となる。4つのアドレス・ビットがチャネルをインデクス指定し、1つのアドレス・ビットが遅延であるかアポダイゼーションであるかを指示する。
【0047】
遅延計算器の好適実施例を図8(図8Aと図8Bとから成る)に示す。遅延計算器のこの実施例は、16チャネル用の遅延及びアポダイゼーションを提供する。4つの比較的小型のランダム・アクセス・メモリ(RAM)を用いて、起動されているアレイについての情報を記憶する。この遅延計算器は256の可能なMUX状態を提供し、各々のチャネルに最大で4つの物理的素子が関連付けられる。「MUX」RAM64が2ビットの値を記憶しており、MUX状態毎に4つの利用可能な素子のうちいずれを各々のチャネルに接続するかを指示する。3つの「Chn」RAM66、68及び70が、チャネル当たり4つの関連する物理的素子の各々の座標を収容している。この2段構造によって、大容量のメモリを用いなくてもマルチプレクサ設計に完全な柔軟性が与えられる。
【0048】
遅延計算器は、全てのチャネルについての遅延が所要の2.5MHzの速度で算出され得るように、40MHzの速度で16チャネルにわたってループする。これは、「開始」信号で初期化される4ビットのアップ・カウンタ58(図8Aを参照)によって行われる。「開始」信号はまた、遅延回路60によって受信される。アップ・カウンタ58は、4ビットのチャネル・インデクス(図8では「チャネル」との参照符号を付されている)を「Chn」RAM66、68及び70に出力すると共にもう1つの遅延回路62に出力する。遅延回路60及び62は、「開始」信号及び「チャネル」信号の遅延形態をそれぞれ出力する(図8Aではそれぞれ「STRT」及び「CHN」との参照符号を付されている。)。「STRT」信号及び「CHN」信号は、対応する遅延及びアポダイゼーション・データと揃えて出力される。
【0049】
4ビットのチャネル・インデクスは8ビットのMUX状態信号と組み合わされて、「MUX」RAM64から素子インデクスを調べ上げる。得られた2ビットの素子インデクスは4ビットのチャネル・インデクスと組み合わされて、「Chn」RAM66、68及び70において物理的素子の座標を調べ上げる。
【0050】
「開始」信号は、簡単な初期化、並びにこの後のパイプライン式遅延及びアポダイゼーション計算にトリガを与える。初期化は、「MUX」RAM64及び素子投影(「PROJ」)RAM92(図8Bを参照)の準備設定を行う。
【0051】
16チャネルにわたる1回目のループは、「開始」の後に、アポダイゼーション用に素子投影RAM92を準備設定するのに用いられる。初期化中に、「Chn」RAM66、68及び70からの素子位置がそれぞれのALU78、80及び82の線B及びマルチプレクサ110(図9を参照)を介してコーディックに直接渡され、コーディック84及び86の制御は、AngSに従う固定角度の回転を行うように設定される。結果は、投影RAM92に記憶される。16チャネルにわたる2回目のループは、動的計算用にパイプを準備するのに用いることができる。全初期化時間は0.5マイクロ秒よりも短い。コーディック制御をパイプラインと同期させることにより、余分のループの必要性がなくなり、初期化を0.25マイクロ秒まで短縮することができる。
【0052】
初期化の後に、遅延計算器は、動的パラメータの更新、並びに動的遅延及びアポダイゼーションの生成を開始する。遅延については(図8Aを参照)、レジスタ72及び74からの焦点座標が、ALU78及び80において、「ChnX」RAM66及び「ChnZ」RAM68からの素子座標からそれぞれ減算されて、座標の差x及びzの絶対値がコーディック84へ供給されると共に、レジスタ76からの焦点座標が、ALU82において、「ChnY」RAM70からの素子座標から減算されて、差yの絶対値がコーディック84の出力と共にコーディック88へ供給される。各々のALUによって実行されるこれらの演算を、加減算器106及び絶対値ブロック108によって図9に示す。加減算器106は、線Aを介して焦点座標を、また線Bを介して素子位置座標を受け取る。マルチプレクサ110は、それぞれのコーディックへ絶対値を渡すように切り換わる。
【0053】
第1のコーディック84は、x及びzを回転した座標系x′及びz′へ変換する。次いで、第2のコーディック86は、x′及びyをx″及びy″へ回転させる。第1のコーディック84は、斜辺をx′上へ回転させることによりxz平面での斜辺を算出し、第2のコーディック86は、この時点でx′y平面に位置している斜辺をx″上へ回転させることにより3次元の斜辺を算出する。算出された斜辺は伝播時間に対応している。レジスタ88からのレンジ・オフセット時間(Roffset)が加算器90においてコーディック86の出力から減算されて、遅延を発生する。
【0054】
アポダイゼーションについては、レジスタ94からのアパーチャ中心(Apx′)が、加算器86において、投影RAM92から読み込まれた素子位置から式(7)に従って減算される。得られた距離Apxi′の絶対値(ブロック98)が、乗算器102によってレジスタ100からのアパーチャ・サイズの逆数(iAP)に乗算される。得られた積を用いて、「ウィンドウ」RAM104内のウィンドウ関数テーブルをインデクス指定し、8ビットのシェーディング(すなわちアポダイゼーション)を生成する。「ウィンドウ」RAM104は好ましくは、複数のウィンドウ関数テーブルから成るバンクを記憶しており、入力される「BANK」によって1つのテーブルが選択される。
【0055】
焦点座標及び素子座標は全て、6.25ナノ秒単位で表現されており、予め1/M倍されているべきである。更なる分数ビットを設けると、精度を維持するのに助けになる。Roffsetは、コーディックの後に位置しているので予め1/M倍されていない。
【0056】
受信ビームフォーマに関して好適実施例を開示したが、本発明を送信ビームフォーミングにも応用し得ることが容易に理解されよう。本発明のもう1つの好適実施例に従って送信ビームフォーマを全般的に表わすためには、図3に示す受信チャネルの代わりにパルス発生回路を置き換えるだけでよい。
【0057】
以上の好適実施例は、説明の目的のために開示された。当業者であれば、本発明の基本的な概念の変形及び改変は容易に想到されよう。これらのような全ての変形及び改変は、特許請求の範囲に包含されているものとする。
【0058】
尚、特許請求の範囲の項で用いられている「〜の関数として」という文言は、「〜のみの関数として」を意味するものと解釈してはならない。例えば、前述の定義によれば、「xの関数としてyを決定する」という文言は、yがxのみの関数として決定されている場合、又はxと1つ若しくはこれよりも多い他の変数、例えばzとの関数として決定されている場合等の全ての場合に関して解釈されたい。
【図面の簡単な説明】
【図1】 ビームフォーマを有する従来の超音波イメージング・システムを示すブロック図である。
【図2】 超音波トランスデューサ・アレイの幾何形状を示す略図である。
【図3】 本発明の好適実施例による敏速な遅延及びアポダイゼーション制御アーキテクチャを示すブロック図である。
【図4】 斜辺計算のための座標回転を示す略図である。
【図5】 アポダイゼーション投影のための座標回転を示す略図である。
【図6】 N段のコーディック回転器を示すブロック図である。
【図7】 コーディック回転器の1つの段を示すブロック図である。
【図8A】 本発明の好適実施例による遅延計算器の一部を示すブロック図である。
【図8B】 本発明の好適実施例による遅延計算器の残りの部分を示すブロック図である。
【図9】 好適実施例による遅延計算器の演算論理ユニット(ALU)を示すブロック図である。
【符号の説明】
2 トランスデューサ・アレイ
4 マルチプレクサ
34 トランスデューサ素子
Claims (18)
- x座標軸及びz座標軸を有する平面内に配列されている多数のトランスデューサ素子を含んでいるトランスデューサ・アレイと、ビームフォーマとを備えたビームフォーミング・システムであって、前記ビームフォーマが、 前記多数のトランスデューサ素子にそれぞれ動作結合されている多数の受信チャネルと、 焦点位置のx座標及びz座標を記憶している第1のメモリと、 前記多数のトランスデューサ素子のそれぞれの位置についてのそれぞれの座標の組を記憶している第2のメモリであって、各々の座標の組がx座標とz座標とを含んでいる第2のメモリと、 前記第1及び第2のメモリに接続されていて、前記焦点位置の前記x座標とそれぞれの前記素子の位置のx座標との間のそれぞれのx座標差を形成する第1の加減算回路と、 前記第1及び第2のメモリに接続されていて、前記焦点位置の前記z座標とそれぞれの前記素子の位置のz座標との間のそれぞれのz座標差を形成する第2の加減算回路と、 前記第1及び第2の加減算回路に接続されていて、該第1及び第2の加減算回路の出力の座標変換を実行するコーディック回転器と、 それぞれの前記受信チャネルにそれぞれの時間遅延を適用する時間遅延発生器であって、各々の時間遅延が前記コーディック回転器のそれぞれの出力の関数である時間遅延発生器とを含んでいること、を特徴とするビームフォーミング・システム。
- 前記コーディック回転器は、該コーディック回転器が第1の状態にあるときには、それぞれのx座標差及びz座標差とそれぞれのz座標のそれぞれの符号ビットとの関数としてそれぞれの斜辺を算出する請求項1に記載のビームフォーミング・システム。
- 前記コーディック回転器は、該コーディック回転器が第2の状態にあるときには、それぞれのx素子位置及びz素子位置とベクトル角度βの関数であるそれぞれの回転符号ビットとの関数としてそれぞれのアポダイゼーション投影を実行する請求項1に記載のビームフォーミング・システム。
- 前記時間遅延発生器は、それぞれの斜辺とレンジ・オフセットとの関数である時間遅延を適用する請求項2に記載のビームフォーミング・システム。
- それぞれの受信チャネルにそれぞれのアポダイゼーション値を適用するアポダイゼーション値発生器を更に含んでおり、各々のアポダイゼーション値がそれぞれのアポダイゼーション投影とアパーチャ中心とアパーチャ・サイズの逆数との関数である請求項3に記載のビームフォーミング・システム。
- 前記アポダイゼーション値発生器は、少なくとも1つのウィンドウ関数テーブルを記憶した第3のメモリを含んでいる請求項5に記載のビームフォーミング・システム。
- 前記第2のメモリから、前記それぞれのx及びz素子位置座標の組を順次読み出すためのカウンタを更に含んでいる請求項1に記載のビームフォーミング・システム。
- 前記コーディック回転器は複数の連続した段を含んでおり、各々の段が、該段への入力を回転させる座標変換を実行し、回転の角度は各々の相次ぐ段毎に小さくなる請求項1に記載のビームフォーミング・システム。
- 前記コーディック回転器の段の数はNであり、段番号をk=0〜N−1であるものとすると、各々の段が、座標変換
- MUX状態により決定される切り換え状態を有する多数の多重化スイッチを含んでいるマルチプレクサを更に含んでおり、前記ビームフォーマは、前記MUX状態を記憶する第3のメモリを更に含んでおり、前記第2のメモリは、前記第3のメモリからの出力に動作結合されている入力を有する請求項1に記載のビームフォーミング・システム。
- x座標軸とz座標軸とを有する平面内に配列されている多数のトランスデューサ素子を含んでいるトランスデューサ・アレイと、 焦点位置と第1の組の前記トランスデューサ素子のそれぞれの位置との関数として第1の組のそれぞれの受信時間遅延を算出する第1の遅延計算器と、 集束した超音波ビームを送信するように前記トランスデューサ・アレイを起動するようにプログラムされている送信ビームフォーマと、 前記第1の組のトランスデューサ素子からのそれぞれのアナログ信号をディジタル・サンプルから成るそれぞれのベクトルへ変換する第1の組の受信チャネルと、該第1の組の受信チャネルにおける前記ディジタル・サンプルから成るそれぞれのベクトルに前記第1の組のそれぞれの受信時間遅延を適用する第1のチャネル制御バスと、正味の受信信号を形成するように少なくとも前記第1の組の受信チャネルからの前記ディジタル・サンプルから成る時間遅延されたベクトルを加算するビーム加算器とを含んでいる受信ビームフォーマと、 前記正味の受信信号から画像信号を導出するプロセッサと、 前記画像信号の関数である画像部分を有する画像を表示する表示装置と、を備えたイメージング・システムであって、 前記第1の遅延計算器は、第1のコーディック回転器状態において、前記焦点位置と前記第1の組のトランスデューサ素子の前記それぞれの位置との関数としてそれぞれの斜辺を算出する第1のコーディック回転器と、前記第1のチャネル制御バスに前記第1の組のそれぞれの受信時間遅延を出力する第1の時間遅延発生器とを含んでおり、前記第1の組の各々の受信時間遅延が前記第1のコーディック回転器により出力されたそれぞれの斜辺の関数であること、を特徴とするイメージング・システム。
- 前記焦点位置と第2の組の前記トランスデューサ素子のそれぞれの位置との関数として第2の組のそれぞれの受信時間遅延を算出する第2の遅延計算器を更に含んでおり、前記受信ビームフォーマは、前記第2の組のトランスデューサ素子からのそれぞれのアナログ信号をディジタル・サンプルから成るそれぞれのベクトルへ変換する第2の組の受信チャネルと、該第2の組の受信チャネルにおける前記ディジタル・サンプルから成るそれぞれのベクトルに前記第2の組のそれぞれの受信時間遅延を適用する第2のチャネル制御バスとを更に含んでおり、前記第2の遅延計算器は、前記焦点位置と前記第2の組のトランスデューサ素子の前記それぞれの位置との関数としてそれぞれの斜辺を算出する第2のコーディック回転器と、前記第2のチャネル制御バスに前記第2の組のそれぞれの受信時間遅延を出力する第2の時間遅延発生器とを含んでおり、前記第2の組の各々の受信時間遅延が前記第2のコーディック回転器により出力されたそれぞれの斜辺の関数である請求項11に記載のイメージング・システム。
- 1組のベクトル・パラメータを生成するコンピュータと、前記第1及び第2の時間遅延計算器に前記1組のベクトル・パラメータを分配するビームフォーマ制御バスとを更に含んでおり、前記第1及び第2の組の受信時間遅延は前記ベクトル・パラメータの関数である請求項12に記載のイメージング・システム。
- 前記第1のコーディック回転器は、第2のコーディック回転器状態において、前記焦点位置と前記第1の組のトランスデューサ素子の前記それぞれの位置との関数としてそれぞれのアポダイゼーション投影を実行し、前記第1の遅延計算器は、前記第1のチャネル制御バスにそれぞれの受信アポダイゼーション値を適用するアポダイゼーション値発生器を更に含んでおり、各々の受信アポダイゼーション値がそれぞれのアポダイゼーション投影の関数である請求項11に記載のイメージング・システム。
- 多数のトランスデューサ素子を有するトランスデューサ・アレイの幾何形状パラメータを記憶する工程と、 焦点位置を有する集束したビームを形成するためのベクトル・パラメータを記憶する工程と、 前記焦点位置から前記それぞれのトランスデューサ素子までの距離を表わすそれぞれの斜辺を、各々の斜辺を導出する多数の段のコーディック回転を用いて、前記幾何形状パラメータと前記ベクトル・パラメータとの関数として算出する工程と、 前記それぞれの算出された斜辺の関数としてそれぞれの時間遅延を発生する工程と、 該それぞれの時間遅延を用いてビームを形成する工程と、を有している超音波ビームフォーミング方法。
- 前記それぞれのトランスデューサ素子についてのそれぞれのアポダイゼーション投影を、各々の投影を実行する多数の段のコーディック回転を用いて、前記幾何形状パラメータと前記ベクトル・パラメータとの関数として実行する工程と、 前記それぞれのアポダイゼーション投影の関数としてそれぞれのシェーディング値を発生する工程と、 前記ビームの形成時に前記それぞれのシェーディング値を用いる工程と、を更に含んでいる請求項15に記載の方法。
- コーディック回転の各々の段が、ビット・シフト及びビット加算を含んでいる請求項15に記載の方法。
- コーディック回転の各々の段が、2の羃乗である係数を用いた座標変換を含んでいる請求項15に記載の方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US09/223,950 | 1998-12-31 | ||
| US09/223,950 US6123671A (en) | 1998-12-31 | 1998-12-31 | Method and apparatus for distributed, agile calculation of beamforming time delays and apodization values |
| PCT/US1999/028652 WO2000041162A1 (en) | 1998-12-31 | 1999-12-06 | Method and apparatus for distributed, agile calculation of beamforming time delays and apodization values |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2002534192A JP2002534192A (ja) | 2002-10-15 |
| JP2002534192A5 JP2002534192A5 (ja) | 2007-02-01 |
| JP4428477B2 true JP4428477B2 (ja) | 2010-03-10 |
Family
ID=22838671
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2000592816A Expired - Lifetime JP4428477B2 (ja) | 1998-12-31 | 1999-12-06 | ビームフォーミング用時間遅延及びアポダイゼーション値の敏速な分散型計算のための方法及び装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US6123671A (ja) |
| EP (1) | EP1060470B1 (ja) |
| JP (1) | JP4428477B2 (ja) |
| DE (1) | DE69929038T2 (ja) |
| WO (1) | WO2000041162A1 (ja) |
Families Citing this family (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3537358B2 (ja) * | 1999-08-30 | 2004-06-14 | 松下電器産業株式会社 | 超音波診断装置 |
| JP3306403B2 (ja) * | 2000-01-19 | 2002-07-24 | 松下電器産業株式会社 | 超音波診断装置 |
| US6592524B2 (en) * | 2000-12-22 | 2003-07-15 | Siemens Medical Solutions Usa, Inc. | Transmit beamformer delay architecture and method for diagnostic medical ultrasound |
| US6443897B1 (en) | 2000-12-28 | 2002-09-03 | Ge Medical Systems Global Technology Company, Llc | Refraction delay error correction using agile beamformer |
| US7024169B2 (en) * | 2002-01-25 | 2006-04-04 | Qualcomm Incorporated | AMPS receiver using a zero-IF architecture |
| JP4195276B2 (ja) * | 2002-11-27 | 2008-12-10 | 古野電気株式会社 | 超音波送信装置、超音波送受信装置およびソナー装置 |
| US7148836B2 (en) | 2004-03-05 | 2006-12-12 | The Regents Of The University Of California | Obstacle penetrating dynamic radar imaging system |
| CN101097256B (zh) * | 2006-06-28 | 2011-03-23 | 深圳迈瑞生物医疗电子股份有限公司 | 超声波束合成聚焦参数实时计算方法及装置 |
| CN101112320B (zh) * | 2006-07-28 | 2010-07-21 | 深圳迈瑞生物医疗电子股份有限公司 | 波束合成的接收聚焦参数的实时计算方法及其装置 |
| CN101116622B (zh) * | 2006-08-02 | 2010-12-01 | 深圳迈瑞生物医疗电子股份有限公司 | 波束合成的接收变迹参数的实时计算方法及其装置 |
| CN101373181B (zh) * | 2007-08-24 | 2012-03-21 | 深圳迈瑞生物医疗电子股份有限公司 | 实时计算逐点变迹系数的方法及装置 |
| CN101422377B (zh) * | 2007-10-31 | 2012-03-28 | 深圳迈瑞生物医疗电子股份有限公司 | 多焦点数据的接收处理方法 |
| JP5645421B2 (ja) * | 2010-02-23 | 2014-12-24 | キヤノン株式会社 | 超音波画像装置および遅延制御方法 |
| CN101858972B (zh) * | 2010-03-23 | 2013-01-30 | 深圳市蓝韵实业有限公司 | 基于延时参数实时计算和流水线的多波束合成方法和装置 |
| CN102768358B (zh) * | 2011-05-05 | 2014-03-26 | 中国科学院声学研究所 | 一种基于fpga的水下实时成像方法及系统 |
| CN102508230A (zh) * | 2011-10-20 | 2012-06-20 | 哈尔滨工程大学 | 图像声纳中时延、相移波束形成的fpga实现方法 |
| JP6188393B2 (ja) * | 2012-11-30 | 2017-08-30 | 東芝メディカルシステムズ株式会社 | 超音波診断装置及び制御プログラム |
| JP6301063B2 (ja) * | 2013-03-18 | 2018-03-28 | キヤノンメディカルシステムズ株式会社 | 超音波診断装置及び制御プログラム |
| US10613205B2 (en) | 2014-10-06 | 2020-04-07 | Analog Devices, Inc. | Systems and methods for ultrasound beamforming |
| US10405829B2 (en) | 2014-12-01 | 2019-09-10 | Clarius Mobile Health Corp. | Ultrasound machine having scalable receive beamformer architecture comprising multiple beamformers with common coefficient generator and related methods |
| CN105629250A (zh) * | 2016-03-31 | 2016-06-01 | 芜湖应天光电科技有限责任公司 | 一种水下三维场景实时成像系统 |
| JP6772944B2 (ja) | 2017-04-19 | 2020-10-21 | トヨタ自動車株式会社 | 自動運転システム |
| CN110333490B (zh) * | 2019-07-30 | 2022-12-27 | 西安电子工程研究所 | 基于流水线工作模式的异步多通道任意波形产生方法 |
| CN110693524B (zh) * | 2019-10-16 | 2022-08-05 | 深圳蓝影医学科技股份有限公司 | 一种超声医学成像聚焦校正方法和装置 |
| CN113552573B (zh) * | 2021-06-29 | 2022-07-29 | 复旦大学 | 一种基于超声环阵合成孔径接收的快速成像算法 |
| KR20240167868A (ko) * | 2022-03-31 | 2024-11-28 | 엑소 이미징, 인크. | 동적 마이크로빔포머를 사용한 초음파 이미징을 위한 시스템 및 방법 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4896287A (en) * | 1988-05-31 | 1990-01-23 | General Electric Company | Cordic complex multiplier |
| EP0365226A3 (en) * | 1988-10-17 | 1991-02-20 | Raytheon Company | Cordic apparatus and method for approximating the magnitude and phase of a complex number |
| US4983970A (en) * | 1990-03-28 | 1991-01-08 | General Electric Company | Method and apparatus for digital phased array imaging |
| US5501219A (en) * | 1993-09-30 | 1996-03-26 | Siemens Medical Systems, Inc. | Real-time dynamic time-of-flight calculator |
| US5488588A (en) * | 1994-09-07 | 1996-01-30 | General Electric Company | Ultrasonic imager having wide-bandwidth dynamic focusing |
| US5653236A (en) * | 1995-12-29 | 1997-08-05 | General Electric Company | Apparatus for real-time distributed computation of beamforming delays in ultrasound imaging system |
-
1998
- 1998-12-31 US US09/223,950 patent/US6123671A/en not_active Expired - Lifetime
-
1999
- 1999-12-06 EP EP99961927A patent/EP1060470B1/en not_active Expired - Lifetime
- 1999-12-06 DE DE69929038T patent/DE69929038T2/de not_active Expired - Lifetime
- 1999-12-06 JP JP2000592816A patent/JP4428477B2/ja not_active Expired - Lifetime
- 1999-12-06 WO PCT/US1999/028652 patent/WO2000041162A1/en not_active Ceased
Also Published As
| Publication number | Publication date |
|---|---|
| EP1060470A1 (en) | 2000-12-20 |
| WO2000041162A1 (en) | 2000-07-13 |
| US6123671A (en) | 2000-09-26 |
| JP2002534192A (ja) | 2002-10-15 |
| EP1060470B1 (en) | 2005-12-21 |
| DE69929038D1 (de) | 2006-01-26 |
| DE69929038T2 (de) | 2006-08-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4428477B2 (ja) | ビームフォーミング用時間遅延及びアポダイゼーション値の敏速な分散型計算のための方法及び装置 | |
| JP4570115B2 (ja) | コヒーレンス・イメージングのための方法および装置 | |
| US7789831B2 (en) | Synthetic elevation aperture for ultrasound systems and methods | |
| EP2187813B1 (en) | System and method for spatial compounding using phased arrays | |
| TW426805B (en) | Multi-dimensional beamforming device | |
| JP3700990B2 (ja) | ビーム形成器及び超音波イメージング・システム | |
| US20050148874A1 (en) | Ultrasonic imaging aberration correction with microbeamforming | |
| JP2006204923A (ja) | コヒーレンス度適応超音波撮像 | |
| US7804736B2 (en) | Delay controller for ultrasound receive beamformer | |
| JP4107840B2 (ja) | 機敏型ビーム形成器を使用した屈折遅延誤差補正 | |
| JPH0870404A (ja) | 超音波ビーム形成装置における遅延生成装置 | |
| JP2001187054A (ja) | 超音波ビーム経路の数値的最適化方式 | |
| EP0179073B1 (en) | Hybrid non-invasive ultrasonic imaging system | |
| JP2000157548A (ja) | 超音波散乱体をイメ―ジングするための方法及びシステム | |
| JP2022502113A (ja) | 高い表示フレームレートで幅広集束送信ビームを用いる3d超音波イメージング | |
| JP6960938B2 (ja) | 1次元パッチを有する2次元超音波アレイトランスデューサ | |
| US11199625B2 (en) | Rapid synthetic focus ultrasonic imaging with large linear arrays | |
| US8038620B2 (en) | Fresnel zone imaging system and method | |
| US4688430A (en) | Device for imaging three dimensions with a single pulse transmission | |
| JPH078492A (ja) | 超音波診断装置 | |
| US5029144A (en) | Synthetic aperture active underwater imaging system | |
| JPH08289891A (ja) | 超音波診断装置 | |
| WO2017220354A1 (en) | Rapid synthetic focus ultrasonic imaging with large linear arrays | |
| JP2001104307A (ja) | 柔軟性のある受信ビームフォーミング用集積回路アーキテクチャ | |
| JP2000157540A (ja) | 投影画像表示方法および装置並びに超音波撮像装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20061201 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20061201 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20091110 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20091208 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20091208 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20091208 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121225 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4428477 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121225 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131225 Year of fee payment: 4 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| EXPY | Cancellation because of completion of term |