JP4384190B2 - 冷蔵庫および冷蔵庫の扉開閉装置 - Google Patents
冷蔵庫および冷蔵庫の扉開閉装置 Download PDFInfo
- Publication number
- JP4384190B2 JP4384190B2 JP2007031035A JP2007031035A JP4384190B2 JP 4384190 B2 JP4384190 B2 JP 4384190B2 JP 2007031035 A JP2007031035 A JP 2007031035A JP 2007031035 A JP2007031035 A JP 2007031035A JP 4384190 B2 JP4384190 B2 JP 4384190B2
- Authority
- JP
- Japan
- Prior art keywords
- door
- rotation
- refrigerator
- drawer door
- opening
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images

















Landscapes
- Refrigerator Housings (AREA)
Description
前記動力伝達部が前記段差部に動力を伝えた後に、前記連結部材が前記動力伝達部から離れる前記回転部材の回転位置を検出する第二の回転位置検出手段と、回転部材の回転位置を検出する第1及び第2の回転位置検出手段を有することを特徴とする冷蔵庫とした。
前後方向に移動自在なスライドレールに載置された引き出し扉と、前記引き出し扉を電動で開閉することができる扉開閉手段とを備え、
前記扉開閉装置はさらにモータなどの駆動源と、モータの回転を減速する減速手段と、前記減速手段によって減速された回転出力軸とともに回転するよう軸支された回転駆動体と、引き出し扉とともに移動可能に設けられ、前記開き駆動範囲において前記回転駆動体と接触する連結部材とを備え、
前記回転駆動体には複数の駆動伝達部材が設けられており、前記複数の駆動伝達部材は前記回転駆動体の回転中心から距離が互いに異なって配置されており、
さらに前記連結部材には前記複数の駆動伝達部材の各々に対応した複数の受け面を備え、回転駆動体が前記引き出し扉を開く方向である開放方向に回転すると、前記回転駆動体の回転中心に最も近い第一の駆動伝達部材が前記連結部材の第一の受け面に当接し、前記回転駆動体の開放方向への回転に伴って、回転中心から第一の駆動伝達部材よりも遠方にある第二の駆動伝達部材が前記連結部材の第二の受け面に当接して、最も回転中心から遠方にある駆動伝達部材が対応する前記連結部材の受け面に当接した後は回転駆動体と連結部材とは離反するので、簡単な構成で引き出し扉を確実に電動で開閉することができ、実用的で信頼性と安全性の高い冷蔵庫の扉開閉装置を提供することを目的とする。
図1は本発明による冷蔵庫の斜視図であり、図2は縦断面図である。冷蔵庫本体1は複数の収納室に分割されている。最上部は冷蔵室2となっていてその扉は左右両側に開く所謂フレンチドアとなっている。冷蔵室2の下側は左右に分割された収納室となっており、その一方は機能切り替え室3となっており、もう一方は図示しない自動製氷装置によって製作された氷を蓄積して取り出す製氷室4となっている。さらにその下部は手前に引き出して開放可能な引き出し扉を備えた冷凍室5となっており、最下段も引き出し扉を備えた野菜室6となっている構成である。
13が設けられており、一旦開いた冷凍室5を閉じるさいに、扉5aの開き量が例えば
50mm以下になったらクローザ13が図示しないバネの力によってこれを奥側に引き込む力を与え、冷凍室5を閉じる動作を補助して冷凍室5の全周に設けられたマグネットパッキン14が冷蔵庫本体1と吸着するまで扉を閉じる。
(以下「回転板19」)が軸支されており、回転板19には動力伝達部である駆動ピン
20が備えられている。本実施例において駆動ピン20は3本設けられており、駆動軸
18からの距離に応じて距離r1に第一の駆動ピン20a、距離r2に第二の駆動ピン
20b、距離r3に第三の駆動ピン20cが設けられており、それぞれの駆動ピン20は円筒形状をなし、かつ駆動ピン20の中心軸は駆動軸18の回転中心軸と平行となっている。ここで、r1<r2<r3であるとする。すなわち、図3で示すように、回転板19の正の回転方向(引き出しを引き出すときの回転板19の回転方向)とは逆の回転方向に向かって、回転中心からの径を徐々に大きく変化させるように複数の駆動ピンからなる動力伝達部が回転板19に設けられている。
31を設け、回転板19に過大な外力が加えられた場合にはトルク制限手段31が介在してアイドラ28とアイドラピニオン29とが互いにすべることで、駆動機構15の破損を防止できる。
(b)(c)(d)(e)の順に動作することで冷凍室5を開放する動作を示している。回転板19は駆動軸18のまわりに回転自在であり、連結板16は図示左右方向に移動自在に支持されており、かつ連結板16は冷凍室5に備えられているので、連結板16の左方向への動きが冷凍室5の開き動作を示している。ここで、冷凍室5が閉じられている状態における連結板16の図示左端の位置を示す基準線を引き込み位置34として表す。
20bが第二の受け面21bと接し、第一の駆動ピン20aは第一の受け面21aからは離反する。すなわち、第二の駆動ピン20bは駆動軸18から図3に示した距離r2の位置にあり、かつr2>r1となるようにしていて第一の駆動ピン20aよりも第二の駆動ピン20bの方が回転中心である駆動軸18からの距離が離れているので回転の周速が速い。そのため、第二の駆動ピン20bが第二の受け面21bと当接した後は、第一の駆動ピン20aは第一の受け面21aからは離反するのである。この状態において、第二の駆動ピン20bは第二の受け面21bに接して、矢印23bの力を与える。このとき、第二の駆動ピン20bは駆動軸18から図3に示した距離r2の位置にあるので、第二の駆動ピン20bから第二の受け面21bを介して連結板16に伝えられる力は、駆動軸18に加わるトルクをTとすれば、T/r2となる。この力は図6(b)の状態で矢印23aの方向に第一の駆動ピン20aにより連結板16に加わる力よりも小なのであるが、マグネットパッキンは既に引き剥がされているので、このときに加わる力はクローザ13による引込力と、冷凍室5の自重および収納された食品の質量をさらに加速する力の合力よりも大なるように設定すればよく、連結板16は冷凍室5とともにさらに図示左方向に移動して、冷凍室5の開き動作を継続する。
20cが第三の受け面21cと接し、第二の駆動ピン20bは第二の受け面21bからは離反する。すなわち、第三の駆動ピン20cは駆動軸18から図3に示した距離r3の位置にあり、かつr3>r2となるようにしていて第二の駆動ピン20bよりも第三の駆動ピン20cの方が回転中心である駆動軸18からの距離が離れているので回転の周速が速い。そのため、第三の駆動ピン20cが第三の受け面21cと当接した後は、第二の駆動ピン20bは第二の受け面21bからは離反するのである。この状態において、第三の駆動ピン20cは第三の受け面21cに接して、矢印23cの力を与える。このとき、第三の駆動ピン20cは駆動軸18から図3に示した距離r3の位置にあるので、第三の駆動ピン20cから第三の受け面21cを介して連結板16に伝えられる力は、駆動軸18に加わるトルクをTとすれば、T/r3となる。この力は図6(c)の状態で矢印23bの方向に第二の駆動ピン20bにより連結板16に加わる力よりもさらに小なのであるが、冷凍室5は既に開き動作を行っていて矢印23cの方向に移動しているので、冷凍室5は容器と収納された食品も含めた自重と速度に応じた運動量をもっており、その運動量と第三の駆動ピン20cから連結板16の第三の受け面21cに伝達される力とによってクローザ13による引っ張り力に抗して開き動作をさらに継続することができる。
20cは第三の受け面21cからほぼ離反する状態を示している。図6(a)の状態から図6(e)の状態に至る連結板16の移動量33が、連結板16が駆動ピン20から力を受ける範囲である開き駆動範囲、ということになる。ここで、この連結板16の移動量
33はクローザ13による引込量である閉じ付勢範囲よりも大なるように設定すると好適である。すなわち、閉じ付勢範囲であるクローザによる引き込みストロークが40mmであって連結板16の移動量33が50mmであるとすれば、図6(e)に示した位置で連結板16が停止、すなわち冷凍室5が停止したとしても、クローザ13によって開いたばかりの冷凍室5が閉じられることがないためである。ただし、図6(e)の状態よりも冷凍室5が開放されて連結板16が図示左方に移動すると、連結板16は駆動ピン20からの駆動力は受けないのであるが、冷凍室5は矢印23d方向への速度を持っているので、スライドレール11のもつ摩擦負荷によって徐々に減速して停止するまでは、開き動作を継続する。このように動作するので、冷凍室5の開き量は連結板16の移動量33よりも大きくなる。
18に加わる駆動トルクが仮に開き時と同一であるとしても、閉じ力は開き力と比べて
r1/r3だけ小さくなるので好適である。このことはさらに、万一冷凍室5と冷蔵庫本体1との間に指などを挟んだ場合においても、挟む力が小さいので安全性が高い。
34に合致されており冷凍室5が閉鎖された位置にある。冷蔵庫においては、本発明のような扉開閉装置10が備えられているとしても、冷凍室5を何らかの理由でユーザが手で引き出す場合もある。または、故障によって扉開閉装置10が動作しない場合などにおいては、ユーザが手動で自在に開閉できることが望ましい。このように手動で開閉する場合には、扉開閉装置10は冷凍室5の開閉の際にユーザによる手動動作を妨げたり、動作が重くなる、などの現象が生じない構成であることが望ましい。
17、回転位置検出手段32からの信号が接続される。ここで各駆動機構、検出手段およびこれを構成する部品の図番号には、冷凍室5および野菜室6を区別するため、添え字F、Vを付け加える。例えば冷凍室5の駆動機構15は15F、扉位置検出手段17は17F、野菜室6の駆動機構15は15V、扉位置回検出手段17は17Vである。冷凍室の開スイッチ8aと野菜室の開スイッチ8bもマイクロコンピュータ41に接続される。
17bの位置すなわち扉位置を検出する。ホールICの位置・間隔および磁石の位置・長さは適宜設定され、ホールIC17dは冷凍室5の扉が完全に閉じられているか否か検出する第1の扉位置検出手段であり、ホールIC17cは冷凍室5扉の開き量が所定の開き量35以内であるか否かを検出する第2の扉位置検出手段である。図10に磁石17bすなわち扉の位置と各ホールICの出力を模式的に示す。扉が完全に閉じられた状態(図
10(a)の状態)でホールIC17c、d双方が論理1を出力し、開かれる(図10
(b)の状態)とホールIC17dの出力は0になり、開き量が大きくなるにつれて、所定の開き量35の位置(図10(c)の状態)でホールIC17cの出力は0になり、さらに大きくなる(図10(d)の状態)と双方とも出力0となる。
32bおよび32cは駆動軸18の軸中心から等距離に配置する。そして磁石32aの回転位置すなわち回転板19の回転位置をホールIC32bおよび32cで検出する。ホールIC32bは図8で説明した扉の手動開閉動作時に、回転板19が連結板16に干渉しない原点範囲を検出する第1の回転位置検出手段である。ホールIC32cは図6で説明した扉の電動開放時に、回転板19上の第三の駆動ピン20cがまさに連結板16の第三の受け面21cからほぼ離反する位置(図6(e)の状態)を検出する第2の回転位置検出手段である。これ以降、回転板19はフリーの状態となり、モータへの負荷が軽くなる。このため、モータを一定電圧で駆動した場合、これ以降高速回転となり騒音が増加することになる。またモータでの駆動開始から図6(e)の状態までは確実に高トルクで駆動する必要がある。仮にモータの高トルク駆動時間をタイマーなどで一定時間に限りそれ以降は低トルク駆動に切り替えると、容器12への収容物重量が重い場合には、図6(e)の状態に達するまでに低トルク駆動に切り替わり、扉を開けることができない状態に陥る可能性がある。
(b))、磁石32aがホールIC32bから外れるため、ホールIC32bは論理0を出力する。回転板19が更にCCW方向に回転し回転板19上の第三の駆動ピン20cがまさに連結板16の第三の受け面21cからほぼ離反する位置(図中(c))となると、磁石32aがホールIC32cの直上にくるため、ホールIC32cは論理1を出力する。更に回転すると磁石32aがホールIC32cから外れるため、ホールIC32cは論理0を出力する。
(ステップS4)を報知手段45で行う。
8bが同時に押された場合には引き出しの開き動作を行わない。また、冷凍室5の開スイッチ8aが押されたら、野菜室6の開スイッチ8bの受け付けを禁止し(ステップS8)、野菜室の扉位置検出手段17Vから扉位置状態を読み込み(ステップS9)、野菜室が開放されていたら(ステップS10)冷凍室の開き動作を行わない。野菜室が閉鎖されていれば(ステップS10)Hブリッジ回路42の出力を切り替え回路44で冷凍室駆動機構15Fのモータに切り替えて(ステップS11)、冷凍室の扉位置検出手段17Fから冷凍室の扉位置を読み込み(ステップS12)、扉開き動作を行う(ステップS13)。すなわち各室の開き動作は排他的に行われる。
S19)、野菜室の扉開き動作を行う(ステップ20)。
45)、過電流をチェックする(ステップS46)。回転板19上の駆動ピン20が連結板16の受け面21に当接して引き出しに力を加え続ける間に、収納ケース内の食品等が本体に引っかかり開きを止める、あるいは引き出しの前の障害物が有るため引き出しの開きが止められるとモータ回転に大きな制動がかかり、過電流が流れる。この過電流を検出することにより、開放カウンタをスタートして(ステップS52)、モータ24の回転を停止させる(ステップS53)。そして、Hブリッジ42にモータ24をCW方向に回転するように、マイコン41のポートP2からデューティ50%の矩形波信号を出力する
(ステップS54)。つまりモータ24を今までとは逆方向に回転させ、回転位置検出手段32で回転位置をチェックしながら回転板19を逆方向に回転させ原点位置まで戻し
(ステップS55)、モータ駆動を停止する(ステップS51)。
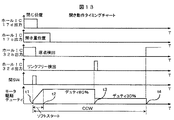
11(C)に示す回転板19上の第三の駆動ピン20cが連結板16の第三の受け面21cからほぼ離反する位置までデューティ80%でモータ24を駆動する。なおモータ24を回転させているときは、フローチャートには示していないが、割り込み処理等により、一定間隔で回転位置検出手段32の出力を読み込んでいる。そして回転位置検出手段32の出力から、回転板19上の第三の駆動ピン20cが連結板16の第三の受け面21cからほぼ離反する回転位置を検出したら(ステップS48)(図13のt3時点)、デューティを30%に落として(ステップS49)、回転位置検出手段32で回転位置をチェックしながら原点位置まで低速にモータ24を回転させる。そして回転位置検出手段32の出力から、原点位置を検出したら(ステップS50)、モータ24を停止させる(ステップS51)。
20cによって矢印36方向(閉じ方向)に押されて移動する。この時、マイクロコンピュータ41はモータ電流検出回路43でモータ電流を読み込み(ステップS95)、過電流をチェックする(ステップS96)。第三の駆動ピン20cが連結板16の受け面21とは対面となる図示左側の戻し面22に当接して力を加えている間に、収納ケース内の食品等が本体に引っかかり閉じを止める、あるいは引き出しと本体の間にユーザが不注意で指等を挟んで閉じが止められるとモータ回転に大きな制動がかかり、過電流が流れる。この過電流を検出することにより、開放カウンタをスタートし(ステップS103)、モータ24Fの回転を停止させる(ステップS104)。そして、Hブリッジ42にモータ
24FをCCW方向に回転するように、マイクロコンピュータ41のポートP1からデューティ30%の矩形波信号を出力する(ステップS105)。つまりモータ24Fを今までとは逆方向に回転させ、回転板19Fを逆方向に回転させ原点位置をチェックしながら原点位置まで戻し(ステップS106)、モータ駆動を停止する(ステップS107)。
(ステップS88)、開放カウンタをスタートさせる(ステップS89)。開放カウンタが所定値Nを超えたら(ステップS99)、フォールトエラーをセットし(ステップS
91)、処理を終了する。
19を冷凍室5を開く場合とは反対方向に回転させることによって、連結板16に対して冷凍室5を閉じる方向の力を加えて閉じることができるので、半ドアを防止して省エネ効果が得られる。
2 冷蔵室
3 切り替え室
4 製氷室
5 冷凍室
6 野菜室
7 操作表示部
8 開スイッチ
10 扉開閉装置
11 スライドレール
12 容器
13 クローザ
14 マグネットパッキン
15 駆動機構
16 連結板
17 扉位置検出手段
17c 第一の扉位置検出手段
17d 第二の扉位置検出手段
18 駆動軸
19 回転板
20 駆動ピン
20a 第一の駆動ピン
20b 第二の駆動ピン
20c 第三の駆動ピン
20d 第四の駆動ピン
21 受け面
21a 第一の受け面
21b 第二の受け面
21c 第三の受け面
21d 第四の受け面
22 戻し面
23 開き方向
24 モータ
25 モータピニオン
26 アイドラ
27 アイドラピオン
28 アイドラ
29 アイドラピオン
30 駆動ギヤ
31 トルク制限手段
32 回転位置検出手段
32b 第一の回転位置検出手段
32c 第二の回転位置検出手段
33 移動量
34 引込位置
35 開き量
36 矢印
37a 第一の先端
37b 第二の先端
37c 第三の先端
38 隙間
39 隙間
40 原点範囲
41 マイクロコンピュータ
42 Hブリッジ回路
43 モータ電流検出回路
44 モータ切り替え回路
45 報知手段
71 扉厚さ
72 扉間隙間
Claims (6)
- 前後方向に引き出すことが可能な引き出し扉を備えた冷蔵庫において、
冷蔵庫本体に固定された回転駆動手段及び前記回転駆動手段の回転により回転し回転方向に向かって回転中心からの距離を徐々に変化させた位置に複数の動力伝達部が設けられた回転部材と、
前記回転駆動手段を制御する制御手段と、
前記引き出し扉又は該引き出し扉に載置される容器の下面に設けられ、複数の段差を有する段差部を有しており、前記段差部で前記動力伝達部の動力を受け前記回転部材の回転運動を直線運動に変換させる連結部材と、
前記引き出し扉が閉じられた時、前記回転部材と前記連結部材が干渉しない前記回転部材の回転位置を検出する第一の回転位置検出手段と、
前記動力伝達部が前記段差部に動力を伝えた後に、前記連結部材が前記動力伝達部から離れる前記回転部材の回転位置を検出する第二の回転位置検出手段と、
を有することを特徴とする冷蔵庫。 - 請求項1において、引き出し扉を開けるためのスイッチを備え、該スイッチが操作されると前記制御手段は前記第一の回転位置検出手段の出力により前記回転駆動手段を動作させ、前記回転部材の回転中心から一番近い距離にある前記動力伝達部を前記連結部材の第1の段差に動力を伝え、前記回転部材の回転中心からその次に近い距離にある前記動力伝達部を前記連結部材の第2の段差に動力を順次伝え、前記動力伝達部を前記段差部に動力を伝えた後に、前記第二の回転位置検出手段の出力により前記回転部材の回転速度を低下させ、前記連結部材は前記動力伝達部から離れ、前記引き出し扉を開けることを特徴とする冷蔵庫。
- 請求項1又は2において、前記引き出し扉が閉じられていることを検出する第一の扉位置検出手段と、前記引き出し扉を閉めるときに前記動力伝達部が前記連結部材に動力を与えることができるところまで前記引き出し扉が位置していることを検知する第二の扉位置検出手段とを有し、前記第一の扉位置検出手段で前記引き出し扉が閉じられていないことを検知し、かつ前記第二の扉位置検出手段で前記引き出し扉が開いていることを検知し、かつ前記第一の回転位置検出手段で前記回転部材と前記連結部材が干渉しない前記回転部材の回転位置を検出した場合には前記引き出し扉を閉める動作を行うことを特徴とする冷蔵庫。
- 請求項3において、引き出し扉を閉めるときは、前記回転駆動手段の回転方向が前記引き出し扉を開けるときと反対向きに回転させ、前記動力伝達部が前記連結部材に動力を与えることを特徴とする冷蔵庫。
- 請求項4において引き出し扉を閉めるときは、前記回転駆動手段の回転方向が前記引き出し扉を開けるときと反対向きに回転させ、複数の前記動力伝達部のうち回転中心から一番遠いところに位置し動力を伝達する部分が前記連結部材に動力を与えることを特徴とする冷蔵庫。
- 請求項1から2において、前記回転駆動手段はモータとこれに電圧を与えるハーフブリッジ回路より構成され、前記第一および第二の回転位置検出手段からの信号により、前記ハーフブリッジ回路に与える駆動信号を制御することにより前記引き出し扉の開き量を調整することを特徴とする冷蔵庫。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007031035A JP4384190B2 (ja) | 2007-02-09 | 2007-02-09 | 冷蔵庫および冷蔵庫の扉開閉装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007031035A JP4384190B2 (ja) | 2007-02-09 | 2007-02-09 | 冷蔵庫および冷蔵庫の扉開閉装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2008196752A JP2008196752A (ja) | 2008-08-28 |
| JP4384190B2 true JP4384190B2 (ja) | 2009-12-16 |
Family
ID=39755861
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007031035A Expired - Fee Related JP4384190B2 (ja) | 2007-02-09 | 2007-02-09 | 冷蔵庫および冷蔵庫の扉開閉装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4384190B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106196872A (zh) * | 2014-08-19 | 2016-12-07 | 东芝生活电器株式会社 | 冰箱 |
Families Citing this family (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101380557B1 (ko) | 2008-03-26 | 2014-04-01 | 엘지전자 주식회사 | 냉장고의 드로어 구동 시스템 및 제어 방법 |
| KR101441133B1 (ko) | 2008-03-26 | 2014-09-17 | 엘지전자 주식회사 | 냉장고의 드로어 구동 제어 방법 |
| CN101981397B (zh) | 2008-03-26 | 2013-08-21 | Lg电子株式会社 | 用于驱动冰箱中的抽屉的系统及方法 |
| US8217613B2 (en) | 2008-03-26 | 2012-07-10 | Lg Electronics Inc. | System and method for driving a drawer of a refrigerator and refrigerator employing same |
| KR101532796B1 (ko) | 2008-03-26 | 2015-07-01 | 엘지전자 주식회사 | 냉장고 |
| KR101547700B1 (ko) | 2008-03-26 | 2015-08-26 | 엘지전자 주식회사 | 냉장고, 냉장고의 드로어 구동 시스템 및 구동 제어 방법 |
| WO2009119921A1 (en) | 2008-03-26 | 2009-10-01 | Lg Electronics Inc. | System and method for driving a drawer in a refrigerator |
| KR101592575B1 (ko) * | 2009-03-20 | 2016-02-05 | 엘지전자 주식회사 | 냉장고 |
| KR101592571B1 (ko) * | 2009-03-20 | 2016-02-05 | 엘지전자 주식회사 | 냉장고 및 그 제어 방법 |
| KR101592573B1 (ko) * | 2009-03-20 | 2016-02-05 | 엘지전자 주식회사 | 냉장고 |
| KR101592572B1 (ko) * | 2009-03-20 | 2016-02-05 | 엘지전자 주식회사 | 냉장고 및 그 제어 방법 |
| KR101592574B1 (ko) * | 2009-03-20 | 2016-02-05 | 엘지전자 주식회사 | 냉장고 및 그 제어 방법 |
| JP6177574B2 (ja) * | 2013-04-23 | 2017-08-09 | 日立アプライアンス株式会社 | 開扉装置およびこれを備えた冷蔵庫 |
| JP2015117895A (ja) * | 2013-12-19 | 2015-06-25 | 日立アプライアンス株式会社 | 冷蔵庫 |
| JP6483456B2 (ja) * | 2015-02-05 | 2019-03-13 | 東芝ライフスタイル株式会社 | 冷蔵庫 |
| CN106969588B (zh) * | 2017-04-13 | 2019-05-28 | 合肥华凌股份有限公司 | 助力开关组件和制冷设备 |
| CN108759286A (zh) * | 2018-08-16 | 2018-11-06 | 泰州乐金电子冷机有限公司 | 冰箱 |
| CN112665260B (zh) * | 2020-12-03 | 2022-12-20 | 青岛海尔电冰箱有限公司 | 冰箱及冰箱内抽屉外桶的支撑控制方法 |
| CN117628772A (zh) * | 2022-08-09 | 2024-03-01 | 青岛海尔电冰箱有限公司 | 冰箱 |
-
2007
- 2007-02-09 JP JP2007031035A patent/JP4384190B2/ja not_active Expired - Fee Related
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106196872A (zh) * | 2014-08-19 | 2016-12-07 | 东芝生活电器株式会社 | 冰箱 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2008196752A (ja) | 2008-08-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4384190B2 (ja) | 冷蔵庫および冷蔵庫の扉開閉装置 | |
| JP4247279B2 (ja) | 冷蔵庫 | |
| JP4247278B2 (ja) | 冷蔵庫 | |
| EP3546861B1 (en) | Refrigerator | |
| JP4143568B2 (ja) | 冷蔵庫の扉開閉装置または扉閉鎖装置 | |
| JP4861926B2 (ja) | 冷蔵庫 | |
| JP4384187B2 (ja) | 冷蔵庫 | |
| JP4374380B2 (ja) | 冷蔵庫 | |
| JP6227341B2 (ja) | 開扉装置及びこれを備えた機器 | |
| JP4988483B2 (ja) | 引き出し式機器 | |
| JP2008196744A (ja) | 冷蔵庫 | |
| JP4215805B2 (ja) | 冷蔵庫 | |
| JP2015055130A (ja) | 開扉装置及びこれを備えた機器 | |
| KR20060050539A (ko) | 냉장고 | |
| JP4366410B2 (ja) | 冷蔵庫 | |
| JP4384189B2 (ja) | 冷蔵庫 | |
| JP4384191B2 (ja) | 冷蔵庫 | |
| JP4477646B2 (ja) | 冷蔵庫 | |
| JP4384188B2 (ja) | 冷蔵庫 | |
| JP4117336B1 (ja) | 引き出し式機器 | |
| JP6324080B2 (ja) | 冷蔵庫 | |
| JP4117337B1 (ja) | 扉開閉装置 | |
| JP6492214B2 (ja) | 開扉装置及び開扉装置を備える機器 | |
| JP6439017B2 (ja) | 開扉装置 | |
| CN112556144A (zh) | 门体结构及其控制方法和空调器 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20081226 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20081226 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20090827 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090915 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090924 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121002 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131002 Year of fee payment: 4 |
|
| LAPS | Cancellation because of no payment of annual fees |