JP4279727B2 - 電動ステアリングロック装置 - Google Patents
電動ステアリングロック装置 Download PDFInfo
- Publication number
- JP4279727B2 JP4279727B2 JP2004172625A JP2004172625A JP4279727B2 JP 4279727 B2 JP4279727 B2 JP 4279727B2 JP 2004172625 A JP2004172625 A JP 2004172625A JP 2004172625 A JP2004172625 A JP 2004172625A JP 4279727 B2 JP4279727 B2 JP 4279727B2
- Authority
- JP
- Japan
- Prior art keywords
- lock
- target
- bar
- steering lock
- actuator
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000001514 detection method Methods 0.000 claims description 13
- 238000000034 method Methods 0.000 claims description 12
- 230000008569 process Effects 0.000 claims description 6
- 238000012795 verification Methods 0.000 description 17
- 230000005540 biological transmission Effects 0.000 description 7
- 230000004043 responsiveness Effects 0.000 description 4
- 238000010586 diagram Methods 0.000 description 3
- 230000009467 reduction Effects 0.000 description 3
- 230000004044 response Effects 0.000 description 3
- 230000006872 improvement Effects 0.000 description 2
- 230000008859 change Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
Images


Landscapes
- Lock And Its Accessories (AREA)
Description
図1は、電子キーシステムの概略構成を示す構成図である。車両1は、イグニッションキーを用いずに各種車両操作が可能な電子キーシステム2を備えている。この電子キーシステム2では、電子キー3の持つIDコードが車両1のIDコードと一致すれば、キー操作を行うことなく車両1の各種動作が許可・開始される。車両1の各種動作としては、ドアの施錠・解錠、ステアリングの施錠・解錠、エンジンの始動、ラッゲージの開操作等がある。
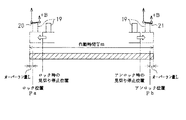
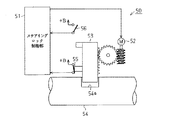
駐車状態の車両1に乗り込んでエンジン9を始動するときには、室内照合成立とエンジンスイッチのエンジン始動操作とを条件に、施錠状態のステアリングロック7の解除動作が開始される。このとき、ステアリングロック制御部8がロックバー作動制御を実行し、ステアリングロック制御部8からの指令に基づきステアリングロックモータ16が一方向に回転を開始し、ロック位置Paのロックバー19がアンロック位置Pb側に移動を開始する。
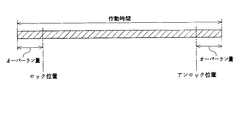
(1)ロックバー19が移動を開始した後の経過時間Txが目標時間Tkに到達したときにステアリングロックモータ16を停止する、つまりステアリングロックモータ16を見切り停止する。従って、ロックバー19がロック位置Pa又はアンロック位置Pb付近で停止することになり、ロックバー19のオーバーラン量Lを少なく抑えることができる。よって、ステアリングロック7の作動時間Tmの短縮化、作動音発生時間の短縮化、ステアリングロック7の応答性向上を図ることができる。
・ 目標時間Tkは一定値をとることに限らず、例えばステアリングロックモータ16に印加される電圧Vと、ステアリングロックモータ16の温度Kとの値に基づき目標時間Tkが決まるように、ステアリングロックモータ16の負荷状況に応じて可変としてもよい。この方法としては、例えば電圧V及び温度Kをパラメータとした図3に示すテーブル31をROM22に用意しておき、温度がK1〜K2の条件下で電圧がV1〜V2のときにはT1に、V2〜V3のときにはT2に、V3〜V4のときにはT3と設定する方法がある。この場合、好適な目標時間Tkを使用することが可能となり、オーバーラン量低減化に一層寄与する。
・ ステアリングロックモータ16を再駆動するとき、ロックバー19の移動速度を再駆動前の通常駆動時より低速で行ってもよい。
・ ロックバー作動制御で経過時間Txが目標時間Tkに到達したにも拘らず、ロックバー19がロック位置Pa(アンロック位置Pb)に到達していないとき、ステアリングロックモータ16を再駆動することに限定されない。例えば、再駆動することに代えてブザー等により運転者にその旨を通知するようにしてもよい。
・ 電子キー3は、ID照合が成立すればドアが施解錠されるキーに限らず、ID照合が許可された時点でドアの施解錠が許可された状態となり、この状態でドアノブのロックボタンを押すとドアロックが施錠状態となり、ドアノブに手を触れるとドアロックが解除状態となるものでもよい。また、電子キー3は、例えば電子キー3のロックボタンを押すとドアが施錠され、アンロックボタンを押すとドアが解錠される電波キーでもよい。
Claims (5)
- ロックバーがアクチュエータによって往動することでステアリングロックが施錠状態となり、前記ロックバーが前記アクチュエータによって復動することで前記ステアリングロックが解除状態となる電動ステアリングロック装置において、
アンロック位置又はロック位置から動き始めた前記ロックバーを目標停止位置で止めるべく、該ロックバーが前記目標停止位置に到達する前にアクチュエータを見切り停止させる際の基準の時間として目標時間を記憶した記憶手段と、
前記ステアリングロックが施錠状態及び解除状態の少なくとも一方となる際に、前記ロックバーが移動を開始してからの経過時間を計時する計時手段と、
前記経過時間と前記目標時間とを比較し、前記経過時間が前記目標時間に到達したときに前記アクチュエータに停止指令を出力して、前記ロックバーを見切り停止させる制御手段と
を備えたことを特徴とする電動ステアリングロック装置。 - 前記見切り停止は、前記ステアリングロックの施錠時と解除時との両方で実施され、前記目標時間は、前記ロックバーがアンロック位置から前記目標停止位置としてのロック位置に移動する際と、前記ロックバーがロック位置から前記目標停止位置としてのアンロック位置に移動する際とで同じ値をとることを特徴とする請求項1に記載の電動ステアリングロック装置。
- 前記ロックバーが前記目標停止位置に到達したことを検出する位置検出手段と、
前記制御手段が前記アクチュエータに停止指令を出力して前記ロックバーの移動を停止させた際に、前記位置検出手段の検出信号に基づき前記ロックバーの停止位置が前記目標停止位置に到達していないと判断したとき、前記アクチュエータを再駆動する再駆動手段とを備え、
前記再駆動手段は、前記アクチュエータを再駆動するとき、再駆動を行う前の通常時における前記ロックバーの移動速度よりも低い速度で前記ロックバーを移動させることを特徴とする請求項1又は2に記載の電動ステアリングロック装置。 - 前記アクチュエータの再駆動時、動き始めた前記ロックバーが前記目標停止位置で止まるまでに要する第2目標時間を記憶した第2記憶手段を備え、
前記再駆動手段は、前記アクチュエータの再駆動時、再駆動時の経過時間と前記第2目標時間とを比較し、再駆動時の経過時間が前記第2目標時間に到達すると前記アクチュエータに停止指令を出力して前記ロックバーの移動を停止させ、前記ロックバーが前記目標停止位置に到達していないと判断すれば前記アクチュエータを再々駆動し、これら処理を前記ロックバーが前記目標停止位置に到達するまで繰り返し行うことを特徴とする請求項3に記載の電動ステアリングロック装置。 - 前記第2目標時間は、段階的な値を有するように前記第2記憶手段に複数記憶され、前記再駆動手段は、前記アクチュエータの再駆動時、最も値の大きい前記第2目標時間を用いて前記アクチュエータを再駆動し、それでも前記ロックバーが前記目標停止位置に到達していないと判断すれば、次に値の大きい前記第2目標時間を用いて前記アクチュエータを再々駆動し、これら処理を前記ロックバーが前記目標停止位置に到達するまで繰り返し行うことを特徴とする請求項4に記載の電動ステアリングロック装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004172625A JP4279727B2 (ja) | 2004-06-10 | 2004-06-10 | 電動ステアリングロック装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004172625A JP4279727B2 (ja) | 2004-06-10 | 2004-06-10 | 電動ステアリングロック装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005349947A JP2005349947A (ja) | 2005-12-22 |
| JP4279727B2 true JP4279727B2 (ja) | 2009-06-17 |
Family
ID=35584770
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004172625A Expired - Fee Related JP4279727B2 (ja) | 2004-06-10 | 2004-06-10 | 電動ステアリングロック装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4279727B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102008013487A1 (de) * | 2008-03-10 | 2009-09-17 | Huf Hülsbeck & Fürst Gmbh & Co. Kg | Verfahren sowie Vorrichtung zur Ansteuerung eines Sperrgliedes |
| JP5170113B2 (ja) * | 2009-07-24 | 2013-03-27 | 株式会社デンソー | 車両用ドア制御システム、車載用ドア制御装置、および車載用ドア制御装置用プログラム |
| JP2015093654A (ja) * | 2013-11-14 | 2015-05-18 | 株式会社東海理化電機製作所 | ロック装置、電動ステアリングロック装置 |
-
2004
- 2004-06-10 JP JP2004172625A patent/JP4279727B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2005349947A (ja) | 2005-12-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8054158B2 (en) | On-vehicle equipment control system | |
| US7254466B2 (en) | Engine start controller | |
| KR100792217B1 (ko) | 원격 시동 제어장치 | |
| US11267439B2 (en) | Activation of valet mode for vehicles | |
| US20050099263A1 (en) | Keyless entry system | |
| US20110068895A1 (en) | Control of a Vehicle Having a Passive Entry-Passive Start Function | |
| US7199710B2 (en) | Controller for remote control system | |
| JP5482700B2 (ja) | 車両用ドア開閉制御装置 | |
| US7498688B2 (en) | Engine start control system for vehicle | |
| JP2012066689A (ja) | 車両制御システム、車両制御方法、及び、エンジン制御装置 | |
| JP5599759B2 (ja) | 始動制御装置 | |
| JP4279727B2 (ja) | 電動ステアリングロック装置 | |
| JP2003214004A (ja) | ドアロックの制御方法及びドアロック装置 | |
| JP4279728B2 (ja) | 電動ステアリングロック装置 | |
| JP3918523B2 (ja) | 車両用遠隔操作システムにおける固有コード登録方法 | |
| WO2014125650A1 (ja) | 車両制御装置 | |
| JP3525580B2 (ja) | キーレスエントリ装置 | |
| JP3857383B2 (ja) | 車両用ステアリングロックシステム | |
| JP4364764B2 (ja) | 電動ステアリングロック装置 | |
| KR100817659B1 (ko) | 차량 엔진 제어 시스템 및 방법 | |
| EP1339026B1 (en) | Electronic key apparatus for vehicle and arrest cancellation method for rotation arresting device | |
| JP5083412B2 (ja) | 車両用制御装置及び方法 | |
| JP2010138815A (ja) | 制御装置および制御方法 | |
| JP6629680B2 (ja) | 車両制御システム、車両制御装置、携帯機 | |
| JPH04244456A (ja) | 車両用キーレスエントリー装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20061020 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20081127 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20081202 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090105 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090127 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090206 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090303 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090312 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120319 Year of fee payment: 3 |
|
| R150 | Certificate of patent (=grant) or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130319 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140319 Year of fee payment: 5 |
|
| LAPS | Cancellation because of no payment of annual fees |