JP4246191B2 - 電動パワーステアリング制御装置 - Google Patents
電動パワーステアリング制御装置 Download PDFInfo
- Publication number
- JP4246191B2 JP4246191B2 JP2005284038A JP2005284038A JP4246191B2 JP 4246191 B2 JP4246191 B2 JP 4246191B2 JP 2005284038 A JP2005284038 A JP 2005284038A JP 2005284038 A JP2005284038 A JP 2005284038A JP 4246191 B2 JP4246191 B2 JP 4246191B2
- Authority
- JP
- Japan
- Prior art keywords
- torque sensor
- torque
- signal
- power supply
- sensor signal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images





Landscapes
- Steering Control In Accordance With Driving Conditions (AREA)
- Power Steering Mechanism (AREA)
- Control Of Electric Motors In General (AREA)
Description
電子的制御手段は、第1および第2の電気信号の一方に従って制御信号(モータ電流値)を発生する手段と、第1および第2の電気信号の他方により制御信号を検証する手段とを含んでいる(例えば、特許文献1参照)。
また、一方の電気信号のみを用いているため、信号のダイナミックレンジが捻り検出手段に供給される電圧に制限されてS/N(Signal to Noise)比が低くなり、制御信号の高精度化を実現できないという問題点もあった。
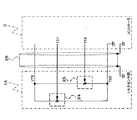
図1は、この発明の実施の形態1に係る電動パワーステアリング制御装置を示すブロック図である。
図1において、この電動パワーステアリング制御装置は、車両の運転者による操舵トルクを検出するトルクセンサ部1(トルク測定手段)と、操舵トルクを補助するための補助トルクを発生するモータ2と、操舵トルクに基づいて、補助トルクに応じたモータ電流値を算出するとともに、モータ電流値についてモータ2を駆動制御するコントローラ3とを備えている。
図2は、図1の第1のトルクセンサ4および第2のトルクセンサ5の出力特性を示す説明図である。
第1のトルクセンサ4および第2のトルクセンサ5は、磁気検出素子であるホールIC(図示せず)を含んでおり、操舵トルクが零であるトルク中立時は、第1のトルクセンサ4および第2のトルクセンサ5からのトルクセンサ信号は等しい。
また、操舵トルクの入力時には、トルクに対して互いに逆方向に変化するトルクセンサ信号を出力するように構成されている。
差動アンプ部11は、第1トルクセンサ信号TS1および第2トルクセンサ信号TS2をインピーダンス変換する入力バッファ15、16と、差動信号TS3を出力する差動アンプ17とを有している。
また、電流偏差とモータ電流値との関係が、マップとしてマイコン7に記憶されている。
ここで、トルクセンサ部1には、電源部からマイコン7と等しい定電圧V1が供給されている。
まず、運転者の操舵によって操舵トルクが生じ、第1のトルクセンサ4および第2のトルクセンサ5で、操舵トルクが検出される。検出された操舵トルクは、互いに逆方向の出力特性を有する第1トルクセンサ信号TS1および第2トルクセンサ信号TS2として、コントローラ3に入力される。
ローパスフィルタ9、10から出力された第1トルクセンサ信号TS1および第2トルクセンサ信号TS2は、それぞれ、ADコンバータ18および差動アンプ部11に入力される。
次に、第1トルクセンサ信号TS1と第2トルクセンサ信号TS2との電位差が、差動アンプ17で演算されて増幅され、差動信号TS3として出力される。
また、互いに逆方向の出力特性を有する第1トルクセンサ信号TS1と第2トルクセンサ信号TS2との電位差を演算するため、トルクセンサ信号が一つである場合と比較して、ダイナミックレンジが倍となり、S/N比を向上させることができる。
差動信号TS3および補償後差動信号TS4は、それぞれローパスフィルタ13およびローパスフィルタ14を通されて、ADコンバータ18に入力される。
また、モータドライバ部8のモータ電流検出手段で検出された実モータ電流が、ADコンバータ18に入力される。
続いて、算出されたモータ電流値と実モータ電流との電流偏差が減算手段で演算され、演算手段では、電流偏差から補正量が算出されて、PWMデューティ比に相当する電流制限量が算出される。
次に、電流制御量に基づいて、モータドライバ部8のモータ駆動手段で、モータ2が駆動される。
第1トルクセンサ信号TS1および第2トルクセンサ信号TS2は、マイコン7の検証手段によって監視されている。検証手段は、第1トルクセンサ信号TS1と第2トルクセンサ信号TS2との大きさが互いに等しく、符号が反対であるという条件を逸脱した場合に、少なくとも第1のトルクセンサ4および第2のトルクセンサ5の何れかが異常であるとして、モータドライバ部8にモータ2の駆動停止の指令を出力する。
そのため、トルクセンサ信号に重畳した同相のノイズ、および電位の変動を相殺して除去し、影響を軽減するとともに、ダイナミックレンジを拡大してS/N比を向上させることができる。
また、特にトルクセンサ信号の経路に位相補償アンプ部12を設けて位相遅れを補償する場合には、制御系の構成によって定まる特定周波数のノイズ成分が大きく増幅されるため、第1トルクセンサ信号TS1と第2トルクセンサ信号TS2との差である差動信号TS3を位相補償アンプ部12に入力することにより、さらにトルクセンサ信号に重畳した同相のノイズ、および電位の変動による影響を軽減することができる。
この場合、マイコン7がトルクセンサ部1からADコンバータ18に入力される信号の電圧値を監視し、この電圧値とマイコン7に供給される定電圧V1とを比較することにより、電源部およびトルクセンサ部1の異常を判定することができる。
上記実施の形態1では、トルクセンサ部1には、電源からマイコン7と等しい定電圧V1が供給されていたが、マイコン7に供給される定電圧V1が低くなった場合に、ダイナミックレンジが定電圧V1に制限されるため、マイコン7に電圧を供給する電源と、トルクセンサ部1に電圧を供給する電源とをそれぞれ分けて設けてもよい。
図3において、ADコンバータ18は、マイコン7から分離して設けられている。また、コントローラ3Aは、ADコンバータ18およびトルクセンサ部1に定電圧V2を供給するトルクセンサ用電源19(第1の電源)と、図示しないが、マイコン7に定電圧V1を供給するマイコン用電源(第2の電源)とを有している。
ここで、トルクセンサ用電源19の供給する定電圧V2は、マイコン用電源の供給する定電圧V1を基準電圧にとし、定電圧V1よりも高く設定されている。
また、マイコン7は、トルクセンサ用電源19の供給する電圧値、ADコンバータ18に入力される第1トルクセンサ信号TS1、および第2トルクセンサ信号TS2を監視する監視手段を有している。
その他の構成については、実施の形態1と同様であり、その説明は省略する。
なお、実施の形態1と同様の動作については、説明を省略する。
第1トルクセンサ信号TS1および第2トルクセンサ信号TS2は、差動アンプ部11の入力バッファ15、16でそれぞれインピーダンス変換され、差動アンプ17に入力される。
このとき、トルクセンサ部1には、定電圧V1よりも高い定電圧V2が供給されているため、ダイナミックレンジをさらに大きく確保することができる。
例えば、トルクセンサ用電源19に所定値以上の電流が流れた場合には、まず過電流保護回路によってADコンバータ18およびトルクセンサ部1に流れる電流が一定値以下に制限される。
続いて、トルクセンサ用電源19に流れる電流が次第に大きくなり、それに伴って電圧値が低下して所定値よりも小さくなると、監視手段から遮断回路に出力を遮断する指令が出力され、トルクセンサ用電源19からの電圧の供給は停止される。
監視手段は、第1トルクセンサ信号TS1および第2トルクセンサ信号TS2の値が異常であると判断した場合には、少なくともトルクセンサ部1およびトルクセンサ用電源19の何れかが異常であるとして、遮断回路に出力を遮断する指令を出力する。
また、監視手段は、外部からのエンジンの停止信号により、遮断回路に出力を遮断する指令を出力する。
また、トルクセンサ用電源19が過電流保護回路と遮断回路とを有しているので、トルクセンサ部1あるいはトルクセンサ用電源19の異常を検出して、電流の制限、あるいは電圧の供給を遮断するで、装置の信頼性を向上させることができる。
一般的に、片電源を用いて差動アンプ17および位相補償アンプ部12を構成した場合、効率的にダイナミックレンジを確保するためには、トルクセンサ部1に供給される電圧の中点電圧を各々の回路にバイアス電圧として加える必要がある。
しかしながら、このときトルクセンサ部1に供給される電源にノイズが重畳していると、トルクセンサ信号に電源ノイズとして重畳し、差動アンプ部11で同相に重畳したノイズを除去しても、位相補償アンプ部12に入力される差動信号TS3に電源ノイズが残ったままとなり、制御系の構成によっては、ノイズが大きく増幅されるという問題点があった。
図4において、コントローラ3Bは、電源部の供給する定電圧V1の中点電圧Vbを差動アンプ17および位相補償アンプ部12に供給する中点バイアス電源供給部20(中点バイアス電源供給手段)を有している。
その他の構成については、実施の形態1と同様であり、その説明は省略する。
なお、実施の形態1と同様の動作については、説明を省略する。
トルクセンサ部1に供給される定電圧V1は、中点バイアス電源供給部20にも供給され、ローパスフィルタ21でノイズ成分が除去された後に、中点電圧Vbが差動アンプ17および位相補償アンプ部12に供給される。
また、位相補償アンプ部12で増幅される周波数領域のノイズをカットするようにローパスフィルタ21を設定することにより、さらに電源ノイズの影響を低減することができる。
上記実施の形態1〜3では、ローパスフィルタ9、10から出力された第1トルクセンサ信号TS1および第2トルクセンサ信号TS2は、それぞれ、ADコンバータ18および差動アンプ部11に入力されている。
しかしながら、多チャンネル式のADコンバータ18を用いた場合、ADコンバータ18のチャンネル間の干渉によって、第1トルクセンサ信号TS1および第2トルクセンサ信号TS2にADコンバータ18からの電圧変動ノイズが重畳するという問題点があった。
また、これらの干渉ノイズは、第1トルクセンサ信号TS1および第2トルクセンサ信号TS2に同相に重畳するわけではなく、差動アンプ17で除去できないという問題点もあった。
図5において、コントローラ3Cは、入力バッファ15、16の出力側とADコンバータ18の入力側との間にローパスフィルタ22、23(入力ローパスフィルタ)を有している。
その他の構成については、実施の形態1と同様であり、その説明は省略する。
なお、実施の形態1と同様の動作については、説明を省略する。
ローパスフィルタ9、10から出力された第1トルクセンサ信号TS1および第2トルクセンサ信号TS2は、それぞれ、ADコンバータ18および差動アンプ部11に入力される。
ここで、ADコンバータ18で発生した干渉ノイズは、ローパスフィルタ22、23で除去され、差動アンプ17に入力される第1トルクセンサ信号TS1および第2トルクセンサ信号TS2に重畳されない。
この場合も、上記実施の形態と同様の効果を奏することができる。
図6は、図1に示したトルクセンサ部1Aの別の構成をコントローラ3とともに示すブロック図である。
図6において、トルクセンサ部1Aは、操舵トルクに応じて抵抗値が変化する摺動抵抗を含み、互いに逆方向の出力特性を有する第1のトルクセンサ24と第2のトルクセンサ25とを有している。
この場合も、上記実施の形態1〜4と同様の効果を奏することができる。
この場合、高周波やノーマルモードのノイズを低減させることができ、さらに精度の高いモータ電流値を算出することができる。
Claims (6)
- 車両の運転者による操舵トルクを検出する第1のトルクセンサおよび第2のトルクセンサを有するトルク測定手段と、
前記操舵トルクを補助するための補助トルクを発生するモータと、
前記操舵トルクに基づいて、前記補助トルクに応じたモータ電流値を算出するとともに、前記モータ電流値に基づいて前記モータを駆動制御するコントローラと
を備え、
前記第1のトルクセンサと前記第2のトルクセンサとは、互いに逆方向の出力特性を有し、
前記コントローラは、
前記第1のトルクセンサからの第1トルクセンサ信号と前記第2のトルクセンサからの第2トルクセンサ信号との差をとることで、前記第1トルクセンサ信号および前記第2トルクセンサ信号に重畳した同相のノイズ成分が除去された差動信号を出力する差動手段と、
前記差動信号の位相遅れを補償して補償後差動信号を出力する位相補償手段と、
前記モータ電流値を算出するマイクロコンピュータと、
前記モータ電流値に基づいて、前記モータを駆動するモータドライバ手段と、
前記コントローラ内で定電圧を供給する電源手段と、
前記トルク測定手段、前記差動手段および前記位相補償手段から出力されるアナログ信号をディジタル信号に変換するADコンバータと
を有し、
前記電源手段は、前記ADコンバータおよび前記トルク測定手段に定電圧を供給する第1の電源と、前記マイクロコンピュータに定電圧を供給する第2の電源とを含み、
前記第1の電源は、前記ADコンバータおよび前記トルク測定手段に流れる電流を制限する電流制限手段と、前記ADコンバータおよび前記トルク測定手段への電力の供給を遮断する遮断手段とを含み、
前記マイクロコンピュータは、前記補償後差動信号に基づいて前記モータ電流値を算出するとともに、前記第1トルクセンサ信号および前記第2トルクセンサ信号を用いて前記第1のトルクセンサおよび前記第2のトルクセンサの異常状態を検証し、
前記第1の電源は、前記第2の電源よりも供給電圧が高く設定されていること
を特徴とする電動パワーステアリング制御装置。 - 前記ADコンバータの入力側に、前記ADコンバータからのノイズ成分を除去するための入力ローパスフィルタを挿入したことを特徴とする請求項1に記載の電動パワーステアリング制御装置。
- 車両の運転者による操舵トルクを検出する第1のトルクセンサおよび第2のトルクセンサを有するトルク測定手段と、
前記操舵トルクを補助するための補助トルクを発生するモータと、
前記操舵トルクに基づいて、前記補助トルクに応じたモータ電流値を算出するとともに、前記モータ電流値に基づいて前記モータを駆動制御するコントローラと
を備え、
前記第1のトルクセンサと前記第2のトルクセンサとは、互いに逆方向の出力特性を有し、
前記コントローラは、
前記第1のトルクセンサからの第1トルクセンサ信号と前記第2のトルクセンサからの第2トルクセンサ信号との差をとることで、前記第1トルクセンサ信号および前記第2トルクセンサ信号に重畳した同相のノイズ成分が除去された差動信号を出力する差動手段と、
前記差動信号の位相遅れを補償して補償後差動信号を出力する位相補償手段と、
前記モータ電流値を算出するマイクロコンピュータと、
前記モータ電流値に基づいて、前記モータを駆動するモータドライバ手段と、
前記コントローラ内で定電圧を供給する電源手段と、
前記電源手段の電源電圧の中点電圧を前記差動手段および前記位相補償手段に供給する中点バイアス電源供給手段と
を有し、
前記中点バイアス電源供給手段は、前記電源手段に重畳したノイズ成分を除去するための電源ローパスフィルタを含み、
前記マイクロコンピュータは、前記補償後差動信号に基づいて前記モータ電流値を算出するとともに、前記第1トルクセンサ信号および前記第2トルクセンサ信号を用いて前記第1のトルクセンサおよび前記第2のトルクセンサの異常状態を検証すること
を特徴とする電動パワーステアリング制御装置。 - 前記マイクロコンピュータは、前記差動信号および前記補償後差動信号を用いて前記位相補償手段の異常状態を検証することを特徴とする請求項1から請求項3までの何れか1項に記載の電動パワーステアリング制御装置。
- 前記第1のトルクセンサおよび前記第2のトルクセンサは、磁気検出素子であるホールICを含むことを特徴とする請求項1から請求項4までの何れか1項に記載の電動パワーステアリング制御装置。
- 前記第1のトルクセンサおよび前記第2のトルクセンサは、前記操舵トルクに応じて抵抗値が変化する摺動抵抗を含むことを特徴とする請求項1から請求項4までの何れか1項に記載の電動パワーステアリング制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005284038A JP4246191B2 (ja) | 2005-09-29 | 2005-09-29 | 電動パワーステアリング制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005284038A JP4246191B2 (ja) | 2005-09-29 | 2005-09-29 | 電動パワーステアリング制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2007091069A JP2007091069A (ja) | 2007-04-12 |
| JP4246191B2 true JP4246191B2 (ja) | 2009-04-02 |
Family
ID=37977280
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005284038A Expired - Fee Related JP4246191B2 (ja) | 2005-09-29 | 2005-09-29 | 電動パワーステアリング制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4246191B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4636127B2 (ja) * | 2008-06-19 | 2011-02-23 | 株式会社デンソー | 電動パワーステアリング装置 |
| JP4775413B2 (ja) * | 2008-07-04 | 2011-09-21 | 株式会社デンソー | 電動パワーステアリング装置 |
| WO2015071974A1 (ja) * | 2013-11-13 | 2015-05-21 | 三菱電機株式会社 | 回転機の制御装置および電動パワーステアリング装置 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0443165A (ja) * | 1990-06-08 | 1992-02-13 | Mazda Motor Corp | 車両のパワーステアリング装置 |
| JP3463580B2 (ja) * | 1998-10-21 | 2003-11-05 | トヨタ自動車株式会社 | 電動パワーステアリング装置 |
| JP2001171533A (ja) * | 1999-12-20 | 2001-06-26 | Toyoda Mach Works Ltd | 電動パワーステアリング装置 |
| JP3507402B2 (ja) * | 2000-04-04 | 2004-03-15 | 三菱電機株式会社 | 故障診断機能を有する電動式パワーステアリング装置 |
| JP2005219625A (ja) * | 2004-02-05 | 2005-08-18 | Koyo Seiko Co Ltd | パワーステアリング装置 |
-
2005
- 2005-09-29 JP JP2005284038A patent/JP4246191B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2007091069A (ja) | 2007-04-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101728992B1 (ko) | 파워 스티어링 장치 및 차량 탑재 기기의 제어 장치 | |
| US8901863B2 (en) | Motor control device | |
| US20070107978A1 (en) | Control unit for electric power steering apparatus | |
| US9667179B2 (en) | Multi-phase motor control apparatus and electric power steering apparatus using the same | |
| US20090179605A1 (en) | Resolver Abnormality Detection Circuit | |
| US20120006612A1 (en) | Electric power steering system | |
| US20020143450A1 (en) | Abnormality detecting method and device for position detecting device, and electric power steering device | |
| US9263982B2 (en) | Motor control system having common-mode voltage compensation | |
| KR101638256B1 (ko) | 레졸버 여자신호 생성 장치 및 방법 | |
| WO2016098244A1 (ja) | モータ制御装置及びそれを用いた電動パワーステアリング装置 | |
| JP4246191B2 (ja) | 電動パワーステアリング制御装置 | |
| JP2008155677A (ja) | パワーステアリング制御装置、および方法 | |
| JP2012053514A (ja) | 電流制御用半導体素子、およびそれを用いた制御装置 | |
| JP7491880B2 (ja) | 電流センサ | |
| JP2009254059A (ja) | 車両駆動装置 | |
| US7155985B2 (en) | Torque sensor for vehicle steering system | |
| JP4607075B2 (ja) | 直流モータの電流検出装置およびガルバノスキャナシステム | |
| JP2006345683A (ja) | 電流検出装置 | |
| JP3575319B2 (ja) | トルクセンサ | |
| JP4935300B2 (ja) | 自己診断を行う異常検出回路を備えたセンサ回路 | |
| JP3525541B2 (ja) | 電動パワーステアリング装置 | |
| JPH08253157A (ja) | 電動パワーステアリング装置 | |
| JP7491879B2 (ja) | 電流センサ | |
| JP3515389B2 (ja) | ロータリエンコーダの電源供給装置 | |
| JP2007093267A (ja) | 電磁流量計 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20080702 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080715 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080912 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20080930 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20081029 |
|
| A911 | Transfer of reconsideration by examiner before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20081208 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090106 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090107 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120116 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |