以下、本発明の実施の形態について、図面を参照して説明する。なお、各図において互いに同一あるいは相当する部材には同一符号を付し、重複した説明は省略する。
図1は、本発明の第1の実施の形態に係る共焦点型検査装置としての共焦点走査顕微鏡1の光学系概要例を示す図である。本図では、検査対象2の表面の一部のみを示している。共焦点走査顕微鏡1は、検査対象2に対向して配置された対物光学系としての対物レンズ5と、対物レンズ5を介して検査対象2に輝点光10aを投光する投光部10と、輝点光10aで検査対象2を二次元に走査する二次元走査系として二次元走査ミラー20と、対物レンズ5を介して検査対象2から戻ってくる前記投光された輝点光10aを結像する結像光学系としての結像レンズ6と、結像レンズ6を介した光を受光する受光部40と、検査対象2と受光部40との間の光路中に配置された第1の臨界角プリズム100とを備える。さらに、共焦点走査顕微鏡1は、受光部40への光を絞る絞り部としてのピンホール41を備える。典型的には、二次元走査ミラー20は、投光部10より投光される光を反射して、二次元に走査するように構成され、受光部40は、結像レンズ6により結像され、受光部40への光を絞るピンホール41で絞られた光を受光するように構成される。
さらに、共焦点走査顕微鏡1は、投光部10と二次元走査ミラー20との間に配置されたビームスプリッタ31と、対物レンズ5と結像レンズ6の共焦点を調節する共焦点調節機構3とを備えている。さらに共焦点調節機構3は、可変焦点レンズである。以下共焦点調節機構3は可変焦点レンズで説明する。可変焦点レンズ3を用いることで、光学系を単純化することができる。また共焦点の調節を高精度で行なえる。なお、可変焦点レンズ3については、図3で後述する。以下、上記構成について詳述する。
なおここでは、xy軸を、検査対象2上に置くように、直交座標系xyzがとられている。またここでは、z軸は対物レンズ5の光軸と平行である。すなわち、光軸方向をz軸方向とし、x軸−y軸平面は、z軸に直交する平面とする。
投光部10は、対物レンズ5を介して検査対象2に輝点光10aを投光するものである。投光部10は、典型的にはLD(半導体レーザーダイオード)であるが、LED(発光ダイオード)であってもよい。以下LDの場合で説明する。なお輝点光10aの形状は楕円形を含む略円形である(図示では円形)。また、投光部10により投光される光は、典型的にはコヒーレント光である
投光部10により光が投光される方向には、投光部10からの光を平行光線にする光源光学系としてのコリメータレンズ(凸レンズ)34、ビームスプリッタ31、可変焦点レンズ3、二次元走査ミラー20がこの順で配置されている。
二次元走査ミラー20は、投光部10より投光される光を反射して、輝点光10aで検査対象2を二次元に走査するものである。二次元に走査するとは、例えば2方向に走査することであり、ここでは、x軸方向、y軸方向にそれぞれ走査する。二次元走査ミラー20で反射された光は、対物レンズ5を介して検査対象2に輝点光10aとして投光される。
対物レンズ5は、その光軸をz軸と平行方向に向けて、検査対象2に対向して配置されている。対物レンズ5は、図示では説明のために単レンズとして示してあるが、典型的には、複数枚多群で構成される組み合わせレンズである。本実施の形態では固定的に取り付けられている。対物レンズ5と二次元走査ミラー20との間には、対物レンズ5側からレンズ35、レンズ36が配置されている。
ここで、上述した二次元走査ミラー20は、対物レンズ5とビームスプリッタ31との間に配置されている。また二次元走査ミラー20は、LD10より投光される光を反射するミラー部21を有している。二次元走査ミラー20は、ミラー部21を、第1の回動軸22aと、第1の回動軸22aと垂直な第2の回動軸22bとの2軸で回動することで、輝点光10aを二次元に走査できるように構成されている。ここでは二次元走査ミラー20は、ミラー部21を、第1の回動軸22a回りに回動させることで輝点光10aで検査対象2上をx軸方向に走査でき、第2の回動軸22b回りに回動させることで輝点光10aで検査対象2上をy軸方向に走査できる。
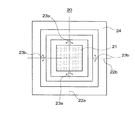
図2は、本発明の第1の実施の形態に係る共焦点走査顕微鏡1の二次元走査ミラーについて説明する模式的平面図である。二次元走査ミラー20は、例えば本図に示すような半導体共振ミラーを用いるとよい。半導体共振ミラーとは、例えば、シリコン基板上貼り合せたミラー部21と、ミラー部21の周囲あるいは裏面にコイルパターンが形成されたベース部24とを含んで構成されている。ミラー部21は、トーションバー(ねじれ軸)23により支持され、トーションバー23a、23bをそれぞれ回転軸22a、22bとして所定の角度範囲内で振動できるように構成されている。半導体共振ミラーは、特定方向に磁界をかけながらコイルパターンに電流を流すことで、ローレンツ力により回転トルクが生じ、トーションバー23a、23bの復元力に釣り合う位置まで振動させることがでる。これにより、入射光の反射方向を平面内で自在にコントロールすることができる。半導体共振ミラーは、ポリゴンミラーやガルバノミラーに比べて、二次元方向の走査が可能なだけでなく、小型で軽量であり、さらに高速走査が可能である。また消費電力も少なく長寿命である。なお、二次元走査系は、以上で説明した二次元走査ミラー20に代えて、複数の一次元走査ミラー(ガルバノミラーやレゾナントミラー)をリレーレンズで結合させた従来方式のものを用いてもよい。
図3は、本発明の第1の実施の形態に係る共焦点走査顕微鏡1の可変焦点レンズ3について説明する模式的断面図である。本図を参照して、可変焦点レンズ3について説明する。可変焦点レンズ3は、例えば人間の眼球で水晶体の厚さを変化させて焦点調節を行っているのと同じ原理に基づいたものである。このような可変焦点レンズ3の構成の概略は、例えば次の通りである。可変焦点レンズ3は、可撓性に富む一対の透明板状体3aと、透明板状体3aの間に充填された変形可能な透明体3bと、透明板状体3aの両端に取り付けられ、透明板状体3aと透明体3bの形状を変化させるアクチュエータ3cを含んで構成される。
可変焦点レンズ3は、アクチュエータ3cにより、透明板状体3aと透明体3bの形状を変化させることで、一対の透明板状体3aを通過する光の屈折率を変化させることができる。即ち焦点を変化させることができる。なおこの透明体3bは、外部環境媒体(例えば空気)と異なる屈折率を持っている。透明体3bは、水などの液体やゼリー状の物質の流動体で、透明板状体3aが変形するとその変形に伴い形状が変化することができる。可変焦点レンズ3は、駆動信号を入力することによりその焦点を変化するものである。可変焦点レンズ3は、例えば、駆動信号の電圧により、その焦点距離を変化させるものである。このような可変焦点レンズ3は、小型軽量であり、さらに高速動作で焦点調節が可能である。
図1に戻って説明する。可変焦点レンズ3は、典型的には、二次元走査ミラー20とビームスプリッタ31との間に配置される。なお、可変焦点レンズ3は、比較的焦点距離の短いレンズを配置する必要がある箇所に配置することが好ましい。このようにすると、可変焦点レンズ3による共焦点の調整幅を大きく取りやすい。また、可変焦点レンズ3は、例えばレンズ35とレンズ36と対物レンズ5のうち、少なくともいずれか1つと置換えてもよい。なおこの場合には、二次元走査ミラー20とビームスプリッタ31との間に配置された可変焦点レンズ3を固定のレンズと置換えてもよいし、二次元走査ミラー20とビームスプリッタ31との間に配置された可変焦点レンズ3をそのまま配置した状態でもよい。後者の場合、共焦点走査顕微鏡1は、可変焦点レンズ3を少なくとも2つ備えることになる。このように、可変焦点レンズ3を複数配置することで、より高精度に共焦点を調節できる。即ち検査対象2を詳細に検査できる。また上記では、可変焦点レンズ3は、レンズ35とレンズ36と対物レンズ5のうち、少なくともいずれか1つと置換える場合で説明したが、例えば上記各レンズと組み合わせてもよい。
なおここでは、可変焦点レンズ3を用いる場合で説明するが、これに限られず、可変焦点レンズ3の代わりとして、例えば可変焦点レンズ3と同様な位置に配置された結像レンズと、前記結像レンズをその光軸方向に移動させる共焦点調節機構としてのレンズ移動手段とを有するものであってもよい。または、共焦点調節機構は、前記結像レンズ又は対物レンズ5を光軸方向に移動させる機構であってもよい。さらにこのような共焦点調節機構と、可変焦点レンズ3とを組み合わせて用いてもよい。この場合には、前記共焦点調節機構により大まかに共焦点を調節し、さらに可変焦点レンズ3で高精度で共焦点を調節するとよい。このようにすることで、高速で高精度な共焦点走査顕微鏡1とすることができる。なお、前記共焦点調節機構は、対物レンズ5を光軸方向に移動させる機構とすると効果的に共焦点の調節を行なえる。この場合には前記共焦点調節機構は粗動のみに用い、詳細な焦点調節は可変焦点レンズ3で行なうので、このため、対物レンズ5を移動させる機構であっても、前記共焦点調節機構を比較的単純な構成とすることができる。なお、この共焦点調整機構は、従来と同様に、対物レンズ5を光軸方向に移動させるステッピングモータのみによる駆動でも良いし、ピエゾ素子を用いたものであっても良い。また、検査対象2を乗せたステージ(ここでは、図示しない)を光軸方向に移動させても良い。
ビームスプリッタ31は、可変焦点レンズ3とコリメータレンズ34との間に配設されている。ビームスプリッタ31は、検査対象2に投光され、検査対象2から二次元走査ミラー20等を介して戻ってくる輝点光10aが、ほぼ直角に反射されるように挿入配置してある。検査対象2から戻ってくる輝点光10aが、ビームスプリッタ31で反射される方向には、調整レンズ8(凸レンズ)、第1の臨界角プリズム100がこの順で配設されている。
ここで、ビームスプリッタ31は、検査対象2から戻る光を投光部10方向と、調整レンズ8、第1の臨界角プリズム100方向とに分離するハーフミラーを用いることができる。なお、ビームスプリッタ31は、ハーフミラーに限られず検査対象2から戻る光を投光部10方向と調整レンズ8、第1の臨界角プリズム100方向とに分離するものであれば何でもよい。例えば、ビームスプリッタ31は、投光部10と検査対象2との間に配置された四分の一波長板(不図示)と、四分の一波長板と投光部10との間に配置され、検査対象2から戻る光のうち所定の偏光方向の光を透過させ前記所定の偏光方向と交差する偏光方向の光を調整レンズ8、第1の臨界角プリズム100方向に偏向する、偏光ビームスプリッタ(不図示)によって構成してもよい。ここでは、ビームスプリッタ31は、ハーフミラーである場合で説明する。
調整レンズ8は、後述する第1の臨界角プリズム100と対物レンズ5との間の光路中、本実施の形態では、ビームスプリッタ31と第1の臨界角プリズム100との間に配設される。ここで、検査対象2に投光され、検査対象2から結像レンズ6等を介してビームスプリッタ31に戻ってくる輝点光10aは、合焦点位置においても、例えば、照射光学系の調整結果として、極微小に平行光からずれていることがある。そこで、調整レンズ8は、検査対象2から結像レンズ6等を介して戻ってくる輝点光10aが、合焦点位置において、ほぼ完全な平行光束となるように構成する。
第1の臨界角プリズム100は、対物レンズ5と結像レンズ6との間の光路中、本実施の形態では、調整レンズ8と後述する結像レンズ6との間に配置される。言い換えれば、第1の臨界角プリズム100は、ビームスプリッタ31によって分離された光の光路中に配置される。
ここで、第1の臨界角プリズム100は、第1の光学面100aと、第2の光学面100bと、第3の光学面100cとを有しており、合焦点位置において、調整レンズ8を通過したほぼ完全な平行光が、第1の光学面100aに入射するように配設される。すなわち、第1の臨界角プリズム100は、第1の光学面100aが調整レンズ8と対向するように配設される。本実施の形態では、第1の光学面100aは調整レンズ8を通過したほぼ完全な平行光の光軸とほぼ垂直に交わるように形成されている。第1の光学面100aから第1の臨界角プリズム100に入射する光は、第2の光学面100bで、第1の光学面100aに入射する光の光軸と交差する方向に反射される。
ここで、第2の光学面100bは、第1の光学面100aから入射する平行光束が、第2の光学面100bに対してちょうど臨界角で入射するように形成される。但し、本実施の形態では、ごくわずか臨界角よりも大きい角度で入射するものとしている。すなわち、第2の光学面100bは、第1の光学面100aに平行光が入射した際に、入射光が全反射するように形成される。第2の光学面100bで反射した光は、第3の光学面100cを介して出射される。第2の光学面100bで反射した光が第3の光学面100cを介して出射される方向には、結像レンズ6、ピンホール41、受光部40がこの順で配設されている。言い換えれば、第3の光学面100cは、結像レンズ6と対向するように形成される。典型的には、第1の光学面100aと第3の光学面100cとは直角をなす。第2の光学面100bが、第1の光学面100a、第3の光学面100cに対して45°をなすときは、第1の臨界角プリズム100の屈折率を√2≒1.414にすれば、第1の光学面100aに垂直に入射した光は、第2の光学面100bにちょうど臨界角で入射し、第3の光学面100cからこれに垂直に射出することになる。ここで、屈折率を例えば1.43とすれば、約1°だけ臨界角よりも大きい角度で入射するシステムとなる。なお、第2の光学面100bへの入射角は、屈折率で調整するほか、第1の臨界角プリズム100のx軸回りの角度設定で調整してもよい。また、第2の光学面100bへの入射角がちょうど臨界角又はわずかに大きくないと、ちょうど対物レンズ5の焦点が合ったときに、第1の臨界角プリズム100からの出射光が少なくなってしまう。
結像レンズ6は、ピンホール41と第1の臨界角プリズム100との間に配置され、ピンホール41に検査対象2から戻ってくる輝点光10aを結像するものである。受光部40は、典型的にはフォトディテクタといった受光素子である。受光部40は、可変焦点レンズ3により結像される光の強度を計測するものである。受光部40は、結像レンズ6を通過した光の光軸方向(z軸方向)に対して、受光面が垂直に交わるように配設される。ピンホール41は、受光部40への光を絞るものであり、可変焦点レンズ3と受光部40との間、ここでは結像レンズ6と受光部40との間に配置されている。受光部40の前にこのようなピンホール41を設置することで、迷光等が入らない、言い換えれば焦点光以外の光を除去できるので、検査対象2からの余分な散乱光やボケを排除し、三次元空間内の1点を正確に検査できる。また、高い分解能を実現できる。
なお受光部40は、別の例として、点状の光の結像に比べて画素の大きさが小さいものを用いてもよい。この場合には、受光素子の広がりそのものが絞りとなる。即ちこの場合には受光部40が絞り部でもある。
共焦点走査顕微鏡1は、可変焦点レンズ3に出力する駆動信号に対応する共焦点の移動距離を予め測定し、前記測定の結果に基づいて共焦点の調節を行なうように構成するとよい。具体的には、例えば駆動信号の電圧と、共焦点の移動距離を対応させてテーブルを生成しておくとよい。なお、テーブルは、電圧又は共焦点の移動距離が一定間隔になるように生成する。ここでは、共焦点の移動距離が一定間隔になるように生成した。可変焦点レンズ3は、電圧と焦点距離の変化(言い換えれば共焦点の移動距離)が線形でなく、一定間隔で共焦点の移動距離が一定間隔になるように制御することが難しい。このように、予め駆動信号の電圧に対応する共焦点の移動距離を予め測定して、テーブルを生成しておくことで、共焦点の調節が容易に行なえる。このため、検査の高速化が可能なだけでなく、検査の自動化が可能になる。テーブルは、後述する記憶部90に記憶しておくとよい。また、共焦点の移動距離を共焦点の位置(例えば対物レンズ5からの距離)としてもよい。即ち、駆動信号の電圧と、共焦点の位置を対応させてテーブルを生成してもよい。
図4に生成したテーブルの例を示す。
再び図1に戻って説明を続ける。共焦点走査顕微鏡1は、演算装置70を備えている。演算装置70は、共焦点走査顕微鏡1全体を制御するものである。また演算装置70は、典型的にはパソコン等のコンピュータである。
演算装置70は、制御プログラムを実行することによって共焦点走査顕微鏡1を制御する制御部80(例えば、CPU)を有している。さらに制御部80には、記憶部90が接続されている。記憶部90は、必要に応じてワークメモリとして使用する第1の記憶部(不図示)と、各種のプログラムや制御データなどを記憶して保存しておく第2の記憶部(不図示)とを含んで構成される。
上述した受光部40は、A/D変換器71を介して制御部80に接続されている。さらに、可変焦点レンズ3、二次元走査ミラー20も制御部80に接続されている。制御部80には、各種の画像や情報を表示する表示部72が接続されている。また、制御部80には、使用者が共焦点走査顕微鏡1を操作するための入力装置73が接続されている。入力装置73はマウスやキーボードを備えている。
制御部80は、共焦点調節機構としての可変焦点レンズ3を駆動して、共焦点の調節を行う共焦点調節部81と、二次元走査ミラー20を駆動して、輝点光10aによるx軸方向及びy軸方向の走査を制御する二次元走査制御部82と、受光部40の出力に基づいて、画像データを生成する画像生成部83と、表示部72による各種の画像や情報の表示を制御する表示制御部84とを含んで構成される。
共焦点調節部81は、可変焦点レンズ3に駆動信号を送信してアクチュエータ3c(図3参照)を駆動して、対物レンズ5と結像レンズ6の共焦点を調節するように可変焦点レンズ3を制御する。すなわち、共焦点調節部81は、例えば図4で上述したテーブルに基づいて、合焦面2aをz軸方向に移動させる(例えば図示の合焦面2a’の位置)ように構成される。二次元走査制御部82は、二次元走査ミラー20に駆動信号を送信してトーションバー23a、23bを駆動して、輝点光10aで検査対象2をx軸方向、y軸方向に走査するように二次元走査ミラー20を制御する。
画像生成部83は、上述したように、受光部40の出力に基づいて、画像データを生成するように構成される。ここで、この共焦点走査顕微鏡1では、対物レンズ5の輝点光10aをy軸方向、x軸方向に移動させて検査対象2の表面を走査して、受光部40による光量検出値を制御部80を介して記憶部90に記憶させる。さらに、合焦面をz軸方向に所定移動させた後、y軸方向、x軸方向に検査対象2の表面を走査して、受光部40による光量検出値を制御部80を介して記憶部90に記憶させる。
記憶部90では、受光部40による光量検出値を各z軸方向位置に対して全て記憶し、後でそれぞれを比較し、最大光量を与えるz軸方向位置を、その最大光量の値と共にx軸方向、y軸方向に対応させて記憶してもよいし、z軸方向に移動させつつ各z軸方向位置における光量を、z軸方向に移動させる前後で比較し、大きい方の光量を与えるz軸方向位置を次々に記憶することにより、最終的に最大光量を与えるz軸方向位置を記憶するようにしてもよい。
本発明の実施の形態による共焦点走査顕微鏡1では、検査対象2の表面が合焦点位置にある際に、受光部40が受光する光量が一番大きくなる。画像生成部83は、記憶部90に記憶させた最大光量の位置情報を検出し、対応した検査対象2のプロファイルデータ、例えば、共焦点画像の画像データや、検査対象2の三次元の立体像を表現している画像データを生成する。画像生成部83は、生成した画像データを記憶部90に送信して記憶させる。表示制御部84は、画像データを読み出し、表示部72に画像表示する。
続けて図1を参照して、共焦点走査顕微鏡1の動作について説明する。具体的には、まず、投光部10を発光させて、可変焦点レンズ3により、およその検査対象2の表面と一致する位置に焦点を調節する。言い換えれば、焦点の合った面、すなわち合焦面2aを調節する。図示されるように、投光部10により発せられた直線偏光の光は、ビームスプリッタ31を透過し、可変焦点レンズ3へ入射する。そして、二次元走査ミラー20で反射され(偏向され)、対物レンズ5に入射し、合焦面2aで収束する。即ち結像する。合焦面2aで収束した光は、合焦面2aに輝点光10aとして結象される。
そして、検査対象2で反射した光は、対物レンズ5から戻り、可変焦点レンズ3に入射したのち、ビームスプリッタ31で受光部40方向に偏向される(図示では90度偏向)。そして偏向された光は、調整レンズ8、第1の臨界角プリズム100、結像レンズ6を介してピンホール41に結像され、このピンホール41を透過した光は受光部40で受光される。受光部40は、受光した光の強度を検出する。
ここで、共焦点走査顕微鏡1は、共焦点光学系であるため、検査対象2に凹凸が存在すると、この凹凸のうち、z軸方向で合焦面2aと一致した部分に投影された輝点光10aはピンホール41上で結像し、ピンホール41を透過する。一致しない部分に投影された輝点光10aはピンホール41面上でボケるため、ピンホール41を透過する光量は大きく減少する。これを利用して、検査対象2のz軸方向のうねり等の凹凸が検査できる。なお、本実施の形態では、第1の臨界角プリズム100を用いることで、z軸方向で合焦面2aと一致しない部分に輝点光10aが投影された場合のピンホール41を透過する光量変化を著しく増大させることができる。詳細については図5で説明する。
この状態で、二次元走査ミラー20により、輝点光10aでx軸方向及びy軸方向に、使用者が選択した任意の範囲で検査対象2を走査することで、検査対象2のz軸方向の凹凸が二次元的(平面的)に検査できる。
さらに共焦点走査顕微鏡1は、上述のような検査対象2の凹凸の二次元的な検査が完了すると、可変焦点レンズ3により、合焦面2aをz軸方向へ移動させて(例えば図示の合焦面2a’の位置に移動させて)、同様な検査を行なう。このような検査をz軸の座標を変えて繰り返し行なう。これにより、z軸の各座標で検査した、各合焦面2aでの検査対象2の凹凸の二次元的な検査結果を積層していくことで、詳細な検査対象2のz軸方向の凹凸の検査、例えば凹凸の深浅とその値まで検査できる。言い換えれば検査対象2の三次元形状を検査できる。
図5は、本発明の第1の実施の形態に係る共焦点走査顕微鏡1の第1の臨界角プリズム100の作用について説明する模式図である。本図は、図1に示したx軸方向矢視図である。すなわち、図5では、紙面に対して垂直方向がx軸方向となる。
図5(a)は、第1の臨界角プリズム100に平行光が入射した際の図である。投光部10(図1参照)から発せられた光が、およそ検査対象2(図1参照)の表面と一致する位置に焦点を結んでいる状態、さらに言えば、検査対象2(図1参照)の表面が焦点の合った面(合焦面2a)となっている状態である際に、第1の臨界角プリズム100に平行光が入射する。投光部10から発せられた光は、対物レンズ5に入射し、合焦面2aで収束している。即ち結像している。合焦面2aで収束した光は、合焦面2aに輝点光10aとして結象される。
第1の臨界角プリズム100に第1の光学面100aを介して平行光が入射すると、入射光は第2の光学面100bで全反射して、第3の光学面100cを介して出射される。第3の光学面100cから出射された出射光は、結像レンズ6を介してピンホール41上で結像し、ピンホール41を透過し、受光部40によって受光される。ここでは、第1の光学面100aに入射する平行光は、第2の光学面100bで全反射することから、受光部40での受光量は、例えば、第1の臨界角プリズム100を配置さなかった場合と比較してほぼ等しい。なお、第1の臨界角プリズム100に平行光が入射すると、受光部40にほぼ正円の像を形成する。
図5(b)は、第1の臨界角プリズム100に収束光が入射した際の図である。例えば、検査対象2(図1参照)の表面に凸部が存在し、合焦面2aよりも対物レンズ5(図1参照)側に当該凸部が位置する場合に、投光部10(図1参照)から発せられた光が、当該凸部に拡散した輝点光10aとして投射される状態、すなわち、凸部の対物レンズ5とは反対側に焦点を結んでいる状態である際に、第1の臨界角プリズム100に収束光が入射する。
第1の臨界角プリズム100に収束光が入射すると、入射光の光軸を境界として光軸よりも第3の光学面100c側の光は、第2の光学面100bに対して臨界角よりも小さい角度で入射するので、一部が第2の光学面100bを透過する。一方、入射光の光軸を境界として光軸よりも第3の光学面100cとは反対側の光は、第2の光学面100bに対して臨界角よりも大きい角度で入射するので全反射する。
この結果、光軸を境とする第1の臨界角プリズム100中の光量にアンバランスが生じる。上述したように、合焦面2aに一致しない部分に投影された輝点光10aはピンホール41面上でボケるため、ピンホール41を透過する光量は大きく減少するのに加え、ここでは、第2の光学面100bに対して臨界角よりも小さい角度で入射した光の一部が第2の光学面100bを透過することで、第1の臨界角プリズム100に平行光が入射した場合と比較して、受光部40での受光量は著しく減少する。なお、第1の臨界角プリズム100に収束光が入射すると、受光部40の受光面に形成される像は、光軸を境界として、調整レンズ8側(第1の光学面100aが位置する側)に形成される円弧状の像が、調整レンズ8とは反対側(第1の光学面100aが位置する側の反対側)に形成される円弧状の像よりも小さくなるように、扁平した形状に形成される。
図5(c)は、第1の臨界角プリズム100に拡散光が入射した際の図である。例えば、検査対象2(図1参照)の表面に凹部が存在し、合焦面2aよりも対物レンズ5(図1参照)とは反対側に当該凹部が位置する場合に、投光部10(図1参照)から発せられた光が、当該凹部に拡散した輝点光10aとして投射される状態、すなわち、凹部の対物レンズ5側に焦点を結んでいる状態である際に、第1の臨界角プリズム100に拡散光が入射する。
第1の臨界角プリズム100に拡散光が入射すると、図5(b)で示した収束光が入射する場合とは逆に、入射光の光軸を境界として光軸よりも第3の光学面100cとは反対側の光は、第2の光学面100bに対して臨界角よりも小さい角度で入射するので、一部が第2の光学面100bを透過する。一方、入射光の光軸を境界として光軸よりも第3の光学面100c側の光は、第2の光学面100bに対して臨界角よりも大きい角度で入射するので全反射する。
この結果、図5(b)で示した場合と同様に、光軸を境とする第1の臨界角プリズム100中の光量にアンバランスが生じる。上述したように、合焦面2aに一致しない部分に投影された輝点光10aはピンホール41面上でボケるため、ピンホール41を透過する光量は大きく減少するのに加え、ここでも、第2の光学面100bに対して臨界角よりも小さい角度で入射した光の一部が第2の光学面100bを透過することで、第1の臨界角プリズム100に平行光が入射した場合と比較して、受光部40での受光量は著しく減少する。なお、第1の臨界角プリズム100に収束光が入射すると、受光部40の受光面に形成される像は、図5(b)で示した場合と同様に、光軸を境界として、調整レンズ8側(第1の光学面100aが位置する側)に形成される円弧状の像が、調整レンズ8とは反対側(第1の光学面100aが位置する側の反対側)に形成される円弧状の像よりも小さくなるように、扁平した形状に形成される。
図6は、本発明の第1の実施の形態に係る共焦点走査顕微鏡1の受光部40での受光量と検査対象2のz軸方向の位置との関係の一例を示した線図である。上述したように本発明の実施の形態による共焦点走査顕微鏡1では、検査対象2の表面が合焦点位置にある際に、受光部40が受光する光量が一番大きくなることから、画像生成部83(図1参照)は、記憶部90に記憶させた最大光量の位置情報を検出して、対応した検査対象2のプロファイルデータを生成する。上述したように、第1の臨界角プリズム100に収束光又は拡散光が入射した際に、合焦面2aに一致しない部分に投影された輝点光10aはピンホール41面上でボケるため、ピンホール41を透過する光量が大きく減少するのに加え、第2の光学面100bに対して臨界角よりも小さい角度で入射した光の一部が第2の光学面100bを透過することで、受光部40での受光量が著しく減少する。このため、本図に示すように、検査対象2の光軸方向(z軸方向)位置に対する受光部40の受光量の変化量が大きくなる。すなわち、受光部40の受光量のピーク(最大値max)を頂点とする曲線の傾斜が急になる。したがって、検査対象2に対する光軸方向(z軸方向)の分解能を向上させることができる。図中実線は、第1の臨界角プリズム100を用いた場合、図中一点鎖線は、第1の臨界角プリズム100を用いなかった場合を示している。
以上で説明した本発明の第1の実施の形態に係る共焦点走査顕微鏡1によれば、調整レンズ8と結像レンズ6との間に配設された第1の臨界角プリズム100に収束光又は拡散光が入射した際に、合焦面2aに一致しない部分に投影された輝点光10aはピンホール41面上でボケるため、ピンホール41を透過する光量が大きく減少するのに加え、第1の臨界角プリズム100の第2の光学面100bに対して臨界角よりも小さい角度で入射した光の一部が第2の光学面100bを透過することで、受光部40での受光量が著しく減少する。すなわち、検査対象2の光軸方向(z軸方向)位置に対する受光部40の受光量の変化量が大きくなる。したがって、検査対象2に対する光軸方向(z軸方向)の分解能を向上させることができるので、検査対象の検査をより正確に行うことのできる共焦点型検査装置を提供することができる。また、第1の臨界角プリズム100を用いることで、収差を含んだ光の光量を減ずることができ、検査対象2からの戻り光の質を向上させることができるので、より解像度を高めることができる。
図7は、本発明の第2の実施の形態に係る共焦点型検査装置としての共焦点走査顕微鏡1’の光学系概要例を示す図である。本図を参照して、本発明の第2の実施の形態に係る共焦点走査顕微鏡1’について説明する。共焦点走査顕微鏡1’は、基本的に第1の実施の形態で説明した共焦点走査顕微鏡1(図1参照)と共通であるが、上述した第1の臨界角プリズム100が配設される位置が異なる点と、第1の補助光学系としての第1の補助レンズ110を備える点で異なる。ここでは、第1の実施の形態に係る共焦点走査顕微鏡1と共通する構成の説明についてはなるべく省略する。
本発明の第2の実施の形態に係る共焦点型検査装置としての共焦点走査顕微鏡1’は、結像光学系としての結像レンズ6よりも焦点距離の短い第1の補助光学系としての第1の補助レンズ110を備え、第1の臨界角プリズム100は、絞り部としてのピンホール41と受光部40との間の光路中に配置されるように構成される。第1の補助レンズ110は、ピンホール41と第1の臨界角プリズム100との間の光路中に配置される。すなわち、検査対象2から戻ってくる輝点光10aが、ビームスプリッタ31で反射される方向には、調整レンズ8(凸レンズ)、結像レンズ6、ピンホール41、第1の補助レンズ110、第1の臨界角プリズム100がこの順で配設されている。
検査対象2の表面が合焦面2aとなっている状態である際に、結像レンズ6よりも焦点距離の短い第1の補助レンズ110は、焦点位置が結像レンズ6の焦点位置、すなわちピンホール41のホール位置と一致するように配設される。第1の臨界角プリズム100は、第1の補助レンズ110を介した光が、第1の光学面100aに入射するように配設される。すなわち、第1の臨界角プリズム100は、第1の光学面100aが第1の補助レンズ110と対向するように配設される。第1の光学面100aから第1の臨界角プリズム100に入射する光は、第2の光学面100bで、第1の光学面100aに入射する光の光軸と交差する方向に反射される。第2の光学面100bで反射した光は、第3の光学面100cを介して出射される。第2の光学面100bで反射した光が第3の光学面100cを介して出射される方向には、受光部40が配設されている。すなわち、第3の光学面100cは、受光部40と対向するように形成される。
検査対象2の表面が合焦面2aとなっている状態である際、検査対象2から戻ってくる輝点光10aは、調整レンズ8でほぼ完全な平行光に調整された後、結像レンズ6を介してピンホール41上で結像し、ピンホール41を透過する。ピンホール41を透過した光は、当該第1の補助レンズ110を介して、ほぼ完全な平行光として第1の臨界角プリズム100に入射する。ここで、第1の補助レンズ110は、結像レンズ6よりも焦点距離が短いので、第1の臨界角プリズム100に入射する光の角度倍率が向上する。
例えば、合焦面2aよりも対物レンズ5(図1参照)側に検査対象2の凸部が位置し、第1の臨界角プリズム100に収束光が入射した際、あるいは、合焦面2aよりも対物レンズ5(図1参照)とは反対側に検査対象2の凹部が位置し、第1の臨界角プリズム100に拡散光が入射した際には、第1の補助レンズ110の作用により第1の臨界角プリズム100に入射する光の角度倍率が向上するので、第2の光学面100bに対して臨界角よりも小さい角度で入射した光の一部が、より確実に第2の光学面100bを透過する。すなわち、受光部40での受光量がより明確に減少し、感度が向上する。
以上で説明した本発明の第2の実施の形態に係る共焦点走査顕微鏡1’によれば、ピンホール41と受光部40との間に配設された第1の臨界角プリズム100に収束光又は拡散光が入射した際に、合焦面2aに一致しない部分に投影された輝点光10aはピンホール41面上でボケるため、ピンホール41を透過する光量が大きく減少するのに加え、第1の臨界角プリズム100の第2の光学面100bに対して臨界角よりも小さい角度で入射した光の一部が第2の光学面100bを透過することで、受光部40での受光量が著しく減少する。すなわち、検査対象2の光軸方向(z軸方向)位置に対する受光部40の受光量の変化量が大きくなる。したがって、検査対象2に対する光軸方向(z軸方向)の分解能を向上させることができるので、検査対象の検査をより正確に行うことのできる共焦点型検査装置を提供することができる。
さらに、第2の実施の形態に係る共焦点走査顕微鏡1’によれば、ピンホール41と第1の臨界角プリズム100との間に配設され、結像レンズ6よりも焦点距離の短い第1の補助レンズ110により、第1の臨界角プリズム100に入射する光の角度倍率が向上するので、第1の臨界角プリズム100に収束光又は拡散光が入射した際の受光部40での受光量がより明確に減少し、感度が向上する。さらに、単純な構成の光学系により、ほとんど完全な平行光束となった状態の光を検出することになるので、合焦時においても有する収差の影響を軽減することができる。
図8は、本発明の第3の実施の形態に係る共焦点型検査装置としての共焦点走査顕微鏡1’’の光学系概要例を示す図である。本図を参照して、本発明の第3の実施の形態に係る共焦点走査顕微鏡1’’について説明する。共焦点走査顕微鏡1’’は、基本的に第1の実施の形態で説明した共焦点走査顕微鏡1(図1参照)と共通であるが、第2の実施の形態に係る共焦点走査顕微鏡1’と同様に、上述した第1の臨界角プリズム100が配設される位置が異なる点と、第1の補助光学系としての第1の補助レンズ110を備える点で異なる。また、第3の実施の形態に係る共焦点走査顕微鏡1’’が、第2の実施の形態に係る共焦点走査顕微鏡1’と異なる点は、ピンホール41が配設される位置が異なる点と、第2の補助光学系として第2の補助レンズ120を備える点である。ここでは、第1の実施の形態に係る共焦点走査顕微鏡1、第2の実施の形態に係る共焦点走査顕微鏡1’と共通する構成の説明についてはなるべく省略する。
共焦点走査顕微鏡1’’は、結像光学系としての結像レンズ6の焦点位置を焦点とし、結像レンズ6よりも焦点距離の短い第1の補助光学系としての第1の補助レンズ110と、第1の補助レンズ110と受光部40との間の光路中に配置される第2の補助光学系としての第2の補助レンズ120とを備える。第1の臨界角プリズム100は、第1の補助レンズ110と第2の補助レンズ120との間の光路中に配置され、絞り部としてのピンホール41は、第2の補助レンズ120と受光部40との間の光路中の、第2の補助レンズ120の焦点位置に配置される。すなわち、検査対象2から戻ってくる輝点光10aが、ビームスプリッタ31で反射される方向には、調整レンズ8(凸レンズ)、結像レンズ6、第1の補助レンズ110、第1の臨界角プリズム100がこの順で配設されている。
検査対象2の表面が合焦面2aとなっている状態である際に、結像レンズ6よりも焦点距離の短い第1の補助レンズ110は、焦点位置が結像レンズ6の焦点位置と一致するように配設される。第1の臨界角プリズム100は、第1の補助レンズ110を介した光が、第1の光学面100aに入射するように配設される。すなわち、第1の臨界角プリズム100は、第1の光学面100aが第1の補助レンズ110と対向するように配設される。第1の光学面100aから第1の臨界角プリズム100に入射する光は、第2の光学面100bで、第1の光学面100aに入射する光の光軸と交差する方向に反射される。第2の光学面100bで反射した光は、第3の光学面100cを介して出射される。第2の光学面100bで反射した光が第3の光学面100cを介して出射される方向には、第2の補助レンズ120、ピンホール41、受光部40がこの順で配設されている。すなわち、第3の光学面100cは、第2の補助レンズ120と対向するように形成される。
検査対象2の表面が合焦面2aとなっている状態である際、検査対象2から戻ってくる輝点光10aは、調整レンズ8でほぼ完全な平行光に調整された後、結像レンズ6を介して第1の補助レンズ110に入射し、ほぼ完全な平行光として第1の臨界角プリズム100に入射する。ここで、第1の補助レンズ110は、結像レンズ6よりも焦点距離が短いので、第2の実施の形態に係る共焦点走査顕微鏡1’と同様に、第1の臨界角プリズム100に入射する光の角度倍率が向上する。
第2の光学面100bで反射し、第3の光学面100cを介して出射される光は、第2の補助レンズ120に入射する。ここでは、第2の補助レンズ120は、第1の補助レンズ110と同様に、焦点距離が結像レンズ6の焦点距離よりも短くなるように構成される。ピンホール41は、第2の補助レンズ120の焦点位置に配設される。
以上で説明した本発明の第3の実施の形態に係る共焦点走査顕微鏡1’’によれば、結像レンズ6と受光部40との間に配設された第1の臨界角プリズム100に収束光又は拡散光が入射した際に、合焦面2aに一致しない部分に投影された輝点光10aはピンホール41面上でボケるため、ピンホール41を透過する光量が大きく減少するのに加え、第1の臨界角プリズム100の第2の光学面100bに対して臨界角よりも小さい角度で入射した光の一部が第2の光学面100bを透過することで、受光部40での受光量が著しく減少する。すなわち、検査対象2の光軸方向(z軸方向)位置に対する受光部40の受光量の変化量が大きくなる。したがって、検査対象2に対する光軸方向(z軸方向)の分解能を向上させることができるので、検査対象の検査をより正確に行うことのできる共焦点型検査装置を提供することができる。
さらに、第3の実施の形態に係る共焦点走査顕微鏡1’’によれば、結像レンズ6と第1の臨界角プリズム100との間に配設され、結像レンズ6よりも焦点距離の短い第1の補助レンズ110により、第1の臨界角プリズム100に入射する光の角度倍率が向上するので、第1の臨界角プリズム100に収束光又は拡散光が入射した際の受光部40での受光量がより明確に減少し、感度が向上する。さらに、ほとんど完全な平行光束となった状態の光を検出することになるので、合焦時においても有する収差の影響を軽減することができる。
また、第3の実施の形態に係る共焦点走査顕微鏡1’’によれば、検査対象2の表面が合焦面2aとなっている状態である際に、例えば、第2の実施の形態に係る共焦点走査顕微鏡1’と比較して、ピンホール41の回折光の影響を取り除くことができるので、第2の補助レンズ120に、ほとんど完全な平行光を入射させることができる。すなわち、極めて理想的な(純粋な)共焦点光学系を構築することができる。また、第2の補助レンズ120の焦点距離を、第1の補助レンズ110の焦点距離と同等にすることで、拡大倍率は、例えば、第1の補助レンズ110、第2の補助レンズ120を用いなかった場合とほぼ等しく、結像レンズ6とほぼ同等の光学系となるが、角度倍率が高くなることで、第1の臨界角プリズム100に収束光又は拡散光が入射した際の受光部40での受光量がより明確に減少し、感度を向上させることができる。
図9は、本発明の第4の実施の形態に係る共焦点型検査装置としての共焦点走査顕微鏡1’’’の光学系概要例を示す図である。本図を参照して、本発明の第4の実施の形態に係る共焦点走査顕微鏡1’’’について説明する。共焦点走査顕微鏡1’’’は、基本的に第1の実施の形態で説明した共焦点走査顕微鏡1(図1参照)と共通であるが、第2の臨界角プリズム130を備える点で異なる。ここでは、第1の実施の形態に係る共焦点走査顕微鏡1と共通する構成の説明についてはなるべく省略する。
共焦点走査顕微鏡1’’’は、第1の臨界角プリズム100の入射光と射出光を含む面と、入射光と射出光を含む面が平行な第2の臨界角プリズム130を備える。ここでは、第2の臨界角プリズム130は、第1の臨界角プリズム100、第2の臨界角プリズム130の入射光と射出光を含む面が一致するように配設される。また、第2の臨界角プリズム130は、第1の臨界角プリズム100と同様に、第1の光学面130aと、第2の光学面130bと、第3の光学面130cとを有している。
第2の臨界角プリズム130は、第1の臨界角プリズム100を通過し、第3の光学面100cから出射される光が、第2の臨界角プリズム130の第1の光学面130aに入射するように配設される。第2の臨界角プリズム130は、第1の光学面130aが第1の臨界角プリズム100の第3の光学面100cと対向して密着するように配設される。第1の光学面130aから第2の臨界角プリズム130に入射する光は、第2の光学面130bで、第1の光学面130aに入射する光の光軸と交差する方向に反射される。
ここで、第2の光学面130bは、第1の臨界角プリズム100と同様に、第1の光学面130aから入射する平行光束が、第2の光学面130bに対してちょうど臨界角で入射するように形成される。但し、本実施の形態では、ごくわずか臨界角よりも大きい角度で入射するものとしている。すなわち、第2の光学面130bは、第1の光学面130aに平行光が入射した際に、入射光が全反射するように形成される。第2の光学面130bで反射した光は、第3の光学面130cを介して出射される。第2の光学面130bで反射した光が第3の光学面100cを介して出射される方向には、結像レンズ6、ピンホール41、受光部40がこの順で配設されている。言い換えれば、第3の光学面130cは、結像レンズ6と対向するように形成される。
第1の臨界角プリズム100に収束光あるいは拡散光が入射すると、第2の光学面100bに対して臨界角よりも小さい角度で入射する光は、一部が第2の光学面100bを透過する。一方、第2の光学面100bに対して臨界角よりも大きい角度で入射する光は、第2の光学面100bで全反射する。さらに、第2の光学面100bに対して臨界角よりも大きい角度で入射し、第2の光学面100bで全反射した光は、第2の臨界角プリズム130の第1の光学面130aに入射し、第2の光学面130bに対して臨界角よりも小さい角度で入射することになる。したがって、第2の光学面100bに対して臨界角よりも大きい角度で入射し、第2の光学面100bで全反射した光は、一部が第2の光学面130bを透過する。すなわち、検査対象2から戻ってくる輝点光10aは、第1の臨界角プリズム100、第2の臨界角プリズム130を通過することで、ほぼ平行光以外の光が排除されることになる。この結果、輝点光10aが合焦面2aに一致しない部分に投影された場合(第1の臨界角プリズム100に拡散光又は収束光が入射した場合)は、輝点光10aが合焦面2aと一致する部分に投影された場合(第1の臨界角プリズム100に平行光が入射した場合)と比較して、受光部40での受光量は極端に減少する。
以上で説明した本発明の第4の実施の形態に係る共焦点走査顕微鏡1’’’によれば、調整レンズ8と結像レンズ6との間に配設された第1の臨界角プリズム100、第2の臨界角プリズム130に収束光又は拡散光が入射した際に、合焦面2aに一致しない部分に投影された輝点光10aはピンホール41面上でボケるため、ピンホール41を透過する光量が大きく減少するのに加え、第1の臨界角プリズム100の第2の光学面100bに対して臨界角よりも小さい角度で入射した光の一部が第2の光学面100bを透過し、さらに、第2の光学面100bに対して臨界角よりも大きい角度で入射した光も第2の臨界角プリズム130の第2の光学面130bで一部が透過することで、受光部40での受光量が極端に減少する。すなわち、検査対象2の光軸方向(z軸方向)位置に対する受光部40の受光量の変化量が大きくなる。したがって、検査対象2に対する光軸方向(z軸方向)の分解能を向上させることができるので、検査対象の検査をより正確に行うことのできる共焦点型検査装置を提供することができる。
なお、本発明の実施の形態に係る共焦点型検査装置は、上述した実施の形態に限定されず、特許請求の範囲に記載された範囲で種々の変更が可能である。以上で説明した共焦点走査顕微鏡1、1’、1’’、1’’’では、一部構成を並び替えてもよい(例えば可変焦点レンズの配置等)。
以上の説明では、共焦点走査顕微鏡1、1’、1’’、1’’’は、典型的には結像光学系としての結像レンズ6の共焦点位置に配置されたピンホール41を備えるが、これに限らず、検査対象2の対物光学系としての対物レンズ5の焦点からの位置ズレΔzに応じて、光を排除するような構成を備えるものを広く含む。例えば、第4の実施の形態で上述したように、第1の臨界角プリズム100、第2の臨界角プリズム130を用いた場合、平行光が入射した際の第2の光学面100b、第2の光学面130bと光軸の角度を臨界角にごく近く(ごくわずかに大きく)することで、合焦面2aに一致しない部分に投影された輝点光10aからの光はほぼ完全に遮光される。したがって、第1の臨界角プリズム100、第2の臨界角プリズム130を用いることで、これを絞り部とし、ピンホール41を省略した構成としてもよい。また、以上の説明では、共焦点走査顕微鏡1、1’、1’’、1’’’は、1個又は2個の臨界角プリズムを用いるものとして説明したが、3個以上の臨界角プリズムを組み合わせて用いてもよい。これにより、臨界角プリズムに入射する光の角度変化に対する受光部40の受光量の変化量をさらに大きくすることができる。すなわち、検査対象2に対する光軸方向(z軸方向)の分解能を向上させることができるので、検査対象の検査をより正確に行うことのできる共焦点型検査装置を提供することができる。