JP4222643B2 - マイクロメカニカル・デバイスの相補リセット方式 - Google Patents
マイクロメカニカル・デバイスの相補リセット方式 Download PDFInfo
- Publication number
- JP4222643B2 JP4222643B2 JP04638397A JP4638397A JP4222643B2 JP 4222643 B2 JP4222643 B2 JP 4222643B2 JP 04638397 A JP04638397 A JP 04638397A JP 4638397 A JP4638397 A JP 4638397A JP 4222643 B2 JP4222643 B2 JP 4222643B2
- Authority
- JP
- Japan
- Prior art keywords
- state
- data
- mirror
- bias
- volts
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000000034 method Methods 0.000 title claims description 22
- 230000000295 complement effect Effects 0.000 title claims description 20
- 230000004044 response Effects 0.000 claims description 5
- 230000007704 transition Effects 0.000 description 29
- 238000001994 activation Methods 0.000 description 14
- 230000004913 activation Effects 0.000 description 13
- 230000005684 electric field Effects 0.000 description 11
- 230000008859 change Effects 0.000 description 5
- 230000008901 benefit Effects 0.000 description 4
- 230000003447 ipsilateral effect Effects 0.000 description 4
- 238000002360 preparation method Methods 0.000 description 3
- 230000008569 process Effects 0.000 description 3
- 230000000694 effects Effects 0.000 description 2
- 230000005686 electrostatic field Effects 0.000 description 2
- 238000003384 imaging method Methods 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 238000000926 separation method Methods 0.000 description 2
- 230000009471 action Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 239000003292 glue Substances 0.000 description 1
Images





Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N1/00—Electrostatic generators or motors using a solid moving electrostatic charge carrier
- H02N1/002—Electrostatic motors
- H02N1/006—Electrostatic motors of the gap-closing type
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B26/00—Optical devices or arrangements for the control of light using movable or deformable optical elements
- G02B26/08—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light
- G02B26/0816—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light by means of one or more reflecting elements
- G02B26/0833—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light by means of one or more reflecting elements the reflecting element being a micromechanical device, e.g. a MEMS mirror, DMD
- G02B26/0841—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light by means of one or more reflecting elements the reflecting element being a micromechanical device, e.g. a MEMS mirror, DMD the reflecting element being moved or deformed by electrostatic means
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Mechanical Light Control Or Optical Switches (AREA)
- Tests Of Electronic Circuits (AREA)
Description
【産業上の利用分野】
本発明は、マイクロメカニカル・デバイスのオペレーションに関連し、更に詳細には、このようなデバイスの活性化(activation)及びリセットに関連する。
【0002】
【従来の技術及びその課題】
マイクロメカニカル・デバイスは典型的に、電流又は電界によって活性化される微小化された可動部品で構成される。これらの可動部品には、ギヤやモーターから可動ミラーやシャッターまで含まれる。部品周辺の電界の制御によって、さらに精巧な基礎電子回路を通常有するこれらのデバイスのオペレーションが可能になる。
【0003】
マイクロメカニカル可動部品に関する課題の1つは、その部品の活性化と動きにある。ギヤやモーターのように、継続して部品を動作させる場合、必要な電界が、動きを開始するために提供され、動きを継続するために供給され、その後、動きを止めるために取除かれるとき、活性化が起こる。反対に、上述のシャッターやミラーのような、段階的な動きを有するマイクロメカニカル・デバイスの場合、全く異なる一連の現象が起こる。
【0004】
部品が動きを開始し、その部品が動き、そして停止するために、提供された電界によって作用されるとき、これらのマイクロメカニカル・デバイスが活性化される。1つの状態から別の状態へ遷移する時間は、「フライト」時間と呼ばれる。デバイス内で多くのこれらの部品を操作するとき、各部品のフライト時間は、別の部品のフライト時間と調整する必要がある。更に、部品が次の状態への準備のため現在の状態から開放される各部品のリセットは、部品間で調整される必要がある。
【0005】
これらの工程により、デバイスの制御性要求条件は増加する。更に、各個別の部品は新しい状態で静止するため、その初期動作を開始するために要求される必要な電界力は更に高くなり得る。これにより、活性化回路の複雑性が増すことになる。これらの問題点によりデバイスは、非常に厳密に制御される必要のある更に複雑なものになる。
このため、このフライト時間を減少させ制御性を増加させる、マイクロメカニカル・デバイスのオペレーションおよび制御の方法が必要とされている。
【0006】
【課題を達成するための手段及び作用】
本発明の1つの態様では、次の状態の準備のためにその部品が現在の状態から開放される、マイクロメカニカル部品のリセット工程を助けるために、相補データ又は見かけ上の相補性データのいずれかが用いられる。電界は、次のシステムの状態の逆側に平衡をシフトするように簡単にセットされる。これにより、エネルギーがシステムへ送り込まれ、次の状態遷移の準備をする。
【0007】
活性化工程が、真のデータに対応する電界に相補的な電界によるか、又は捕捉電界の極性がリバースされて、データに相補性を現すことのいずれかによって起こる。その後、捕捉電界が除去されるか、下げられ、その部品は次の状態へ遷移する。次の状態は、第1の状態と同じ状態であっても、第1の状態と異なる状態であってもよい。
【0008】
本発明の利点の一つは、本発明により、部品が第1の状態とは異なる次の状態へ移動する離脱スピードが増す点にある。
更に、本発明の利点は、本発明により、部品が第1の状態と同じである次の状態へ移動する離脱スピードが減少する点にある。
本発明のもう1つの利点は、本発明により、これらの個々のデバイスのアレイの制御性が増す点にある。
【0009】
【実施例】
本発明の一実施例を図面を参照して説明する。
本発明に説明された技術は、すべてのマイクロメカニカル・デバイスに適用し得るが、1つの静止状態から別の静止状態へ遷移する際、段階的に移動するようなデバイスに、特に適している。典型的に、これらのデバイスは、入力データに対応して供給される電界に基づいて状態を変化させる。本発明の説明は、この種のデバイスに焦点を合わせているが、本発明の特許請求の範囲を限定することを意味するものではない。
【0010】
一例として、本発明のデバイスは、電気信号および静電界を用いて、部品を活性化し、その後それらを捕獲する。本発明のデバイスのこれらの活性化電界および捕獲電界を、データおよびバイアス電圧と呼んでいる。しかし、電気的に制御されたマイクロメカニカル・デバイスに任意の方法で本発明の実施例を適用することが、これらの用語の使用により制限されることを意味するものではない。
【0011】
様々な操作上の制約を受けているこれらの段階的デバイスの1つの例は、マイクロメカニカル空間光変調器である。この種のデバイスは典型的に、画像を形成するために用いられる、個別にアドレス指定可能なアレイで構成される。これらのデバイスが大抵の制約を受けるのは、画像形成の用途においてである。入力ビデオデータから画像を形成する際、変調器の素子は、非常に速いスピードで状態を切替えることができなければならない。更に、これらの素子がヒンジの上に支持されるミラーで構成される例において、これらは、ミラーを支持するヒンジがその静止位置に完全には戻らず、画像光学系に入る漂遊光(stray light )を生じさせるヒンジたわみと呼ばれる状態にしばしばなることがある。更に、ミラーが別の表面上へ実際に着地するように活性化される場合、膠着と摩擦の組合せ(張り付き(stiction)という)が、これらの部品の開放(リセット)を困難にすることがある。
【0012】
これらの素子は、素子と活性化回路との間に静電引力をつくるようにせしめることによって特定の状態になるようにする電気信号によって活性化される。リセットとは、その次の状態へ移動するための準備をするため、素子が現在の状態から開放される工程をいう。素子は、この場合はバイアス電圧である捕獲電界によって、状態から状態への遷移の間の場所に保持される。
【0013】
このような変調器の一つの例は、図1aから図1bに示すデジタル・マイクロミラー・デバイス(DMD(商標))である。図1aにおいて、変調器素子10はアドレス指定されていない状態で示されている。この素子は、ヨーク14上に支持されたミラー12を有する。ヨーク14は、図示されていないが、この図のページには現れない平面にあるヒンジを有する。ヒンジは、ヨーク14、およびそれに従ってミラー12を、活性化信号に応じてヒンジの軸の回りに動かす。
【0014】
活性化信号は、アドレス指定電極18aおよび18b上に供給される。これらの電極がアドレス指定されるとき、ヨーク14とアドレス電極の一方との間の静電力は、その静電力が非平衡となるようにつくられる。これにより、ヨーク14が、アドレス指定されるアドレス電極の任意の一方に引き付けられる。この引力の結果が図1bに示されている。
【0015】
この例では、ヨーク14がそれに引き付けられるように、アドレス電極18bがアドレス指定される。その後、ヨーク/ミラー構造は、ヨークが着地電極16bとコンタクトするまでアドレス電極18bに向ってヒンジの回りを偏向する。更に、ミラー・ストップ又は着地電極20bが提供され得る。この時点で、ミラーは安定状態に遷移し、画像化の用途では、偏向ミラーから反射された光が画像光学系に導かれるON状態か、光が画像光学系からそれるOFF状態になる。
【0016】
静電界の強度及び平衡は、様々な電圧の操作を通して維持される。これらの遷移を生じさせるために用いられ得る電圧値の先行技術のシーケンス及び例が、図2aから図2hに示されている。図2aにおいて、ミラーは図1bに示した状態にある。これは、この例の場合、ビデオ用途における新しいフレームなどの様な、新しいデータセグメントの始まりであると仮定され得る。ミラーはその上に、20ボルトに等しいバイアス電圧VM を有する。活性化された電極18bは、0ボルトに等しい電圧Vb を有する。反対側の電極18aは、6ボルトに等しい電圧Va を有する。
【0017】
電圧Va 及び電圧Vb は、新しいデータが次のフレーム用にロードされている図2bでそのまま残っている。この場合、新しいデータは素子がその同じ状態にとどまることを必要とする。Va は、6ボルト、電圧Vb は0ボルトに等しい。図2cでは、素子がその新しい状態へ遷移できるように、バイアス電圧VM が瞬間的に6ボルトまで下がる。データは、その前のフレーム用のものと同じであるため、電圧Va 及びVb は同じままであり、素子は現在の状態から動くべきではない。しかし、それが瞬間的に非平衡となりうるため、素子の動きがあり得る。図2dにおいて、バイアス電圧VM が20ボルトに戻るとき、瞬間的不安定がなくなる。この古いデータから、古いデータと実質的に同じ新しいデータへの遷移は、『同側(same side) 』遷移と呼ぶ。
【0018】
図2eから図2hにおいて、次のフレームでロードされるデータに基づいて状態を変える素子に同じシーケンスがなされる。図2eは右(又は“a”)側に偏向する素子を示す。この場合、活性化された電極は0ボルトに等しい電圧Va を有し、反対側の電極は6ボルトに等しい電圧Vb を有する。図2fにおいて、次のフレーム用の新しいデータがロードされる。ここで、電圧Vb が0ボルトに等しく、電圧Va が6ボルトに等しくセットされるように、素子を別の状態にさせるようにすることが望ましい。図2gにおいて、VM は瞬間的に6ボルトまで下がり、ミラーが開放され、左(又は“b”)側に遷移される。図2hにおいて、VM は20ボルトに戻りミラーを安定させる。古いデータから、古いデータとは異なる新しいデータへのこの遷移は、『逆側(opposite side )』遷移と呼ぶ。
【0019】
ミラーとアドレス電極との間の電位は、次の表に示すことができる。
【表1】
これらのデバイスの高速でのオペレーションでは、アレイの各素子の非常に精密な制御が必要とされる。素子を作動へと活性化しラッチしその後それらを安定させる電圧は、信号を介して素子へ送られる必要がある。これらの信号の時間は、厳密に制御されなければならない。素子が遷移することを可能にするために、素子をラッチするバイアス電圧が非常に長い間下がっていると、素子はその状態から開放され、漂遊光はON光パスに集まる。バイアス電圧が非常に短い間しか下がっていない場合、どの素子も開放されず、画像をアップデートするための状態へは変化しない。
【0021】
本発明の第1の実施例において、バイアス電圧VM の瞬間的な下落のすぐ前に、データはリバースされるように又は相補性であるように現れる。このアプローチの一例を図3aから図3hに示す。図3aにおいて、素子は新しいフレームのスタートで“b”側に示されている。ミラーバイアスVM は20ボルト、アドレス電極はVb =0ボルト、Va =6ボルトである。見かけ上の相補性データは、デバイスの平衡を次の状態から離すようシフトするように機能する。
【0022】
図3bにおいて、新しいフレーム用のデータがロードされる。データは、図2fで説明したように逆側遷移用のものであるように思われるが、実際は同側遷移用であることに注意されたい。Vb は0ボルトから6ボルトへ変わり、Va は6ボルトから0ボルトに変わる。図3cにおいて、ミラーバイアスVM は0まで下がるが、相補データはアドレス電極上にある。最後に、図3dにおいて、VM が再度供給され、Va 及びVb は0ボルト及び6ボルトのそれぞれ同じ側の電圧に戻る。
【0023】
図3eから図3hは、逆側遷移用の電圧シーケンスを示す。図3aは、予測電圧値を示し、ミラーが偏向する側で0ボルト、反対側で6ボルトである。次のフレーム用のデータロードの間、逆側遷移が望ましいオペレーションであるとしても、これらの電圧は同じままである。図3gにおいて、6ボルトを有する側へミラーを動かすVM (この場合は18bである)はゼロまで下がる。図3hにおいて、VM は再供給され、電極上の電圧は予め予測されていたレベルまで戻る。
【0024】
その後、本質的に、アドレス電極上のデータは、バイアスが取除かれるとき相補性を現す。このデータは、バイアスが再供給されるとき、真の値(ここで、真の値は、図2aから図2hの先行技術の実施例で用いられた値)にもどる。このアプローチの利点は、同側遷移を構成する素子の離脱速度が減少する一方、逆側遷移を構成する素子の離脱速度が増加することである。同側遷移は理想的には全く遷移がなく、そのため、素子の不安定さを制限する同側の離脱速度を減少させることを想起されたい。
【0025】
この相補データ方法の効果を次の表に要約する。
【表2】
先行技術の実施例において、次のフレーム用のデータをロードする工程とバイアスを下げる工程の作用の差は、同側で364ユニット、逆側で196ユニットである。上述の実施例において、同じ工程間の差は、同側で160ユニット、逆側で400ユニットである。これは、上述の離脱速度の差となる。これらの変化の最終的な結果は、アレイの素子の制御性の増大である。更に、素子がパルスされてそれらを新しい状態へ移動させる、リセットのオペレーションは、その静電力のブーストのため、より効率的である。
【0027】
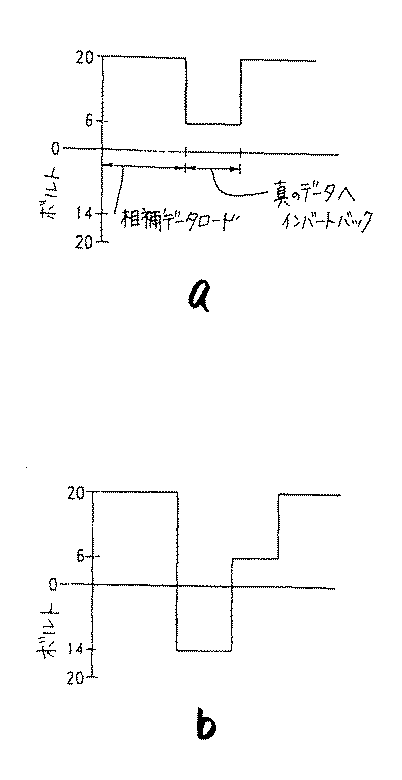
この相補アプローチの実施例は、2通りの方法で成され得る。1つは、相補方式と呼ばれ、図3aから図3hに示されている。この方法を用いる場合、素子の全アレイは、相補データと共にロードされ、バイアスは下げられ、真のデータがアレイ上にロードされ、バイアスが再供給される。この実施例のリセット波形の一例のグラフを図5aに示す。
【0028】
この種の相補アドレス指定の第2の実施例は、バイポーラ方式と呼ばれる。この方法では、真のデータがアレイ上にロードされ、バイアスの極性がリバースされ、その後下げられ、その基のレベルで再供給される。この第2の実施例を図4aから図4jに関連して説明する。
【0029】
この実施例を用いた同側遷移が、図4aから図4eに示される。図4aにおいて、その画素はフレームのスタートであり、その予測レベルの電圧を有する。図4bにおいて、次のフレームのためにデータがロードされる。図4cにおいて、ミラー上のバイアスVM が20ボルトから−14ボルトにリバースされるという、今までに使われなかった工程が起こる。図4dにおいて、バイアスは6ボルトに下げられる。バイアスが下げられる直前に、前の実施例で実際に相補データを用いて成されたように、リバース・バイアスはデータが相補性を現すようにする。バイアスが下げられると、同じ効果が起こる。図4eにおいて、バイアスは20ボルトで再供給される。
【0030】
逆側遷移が図4fから図4jに示されている。図4fは“a”側に偏向したミラーのためにその予測レベルの電圧を有する。図4gにおいて、新しいフレームのためのデータがロードされ、電圧Vb 及びVa が切替えられる。VM がリバースされるとき、ミラーはそのデータを逆であるとみて、図4iにおいてバイアスが下げられるときミラーは新たな側に遷移する。最後に、バイアスが図4jで再供給される。この実施例のリセット波形の一例を図5bに示す。この実施例において、バイアスのリバースは、デバイスの平衡が次の状態から離れるようシフトするように機能する。
【0031】
上述の説明は特定の電圧値と2つの状態の間の遷移に関して成されたが、その状況に限定されるものではないことに注意されたい。電圧の相対値が重要であり、相補データをロードする又はデータに相補性を現すようにさせるためバイアスをリバースするという考えは、他の状況にも適用できる。例えば、任意の数のマイクロメカニカル・デバイスの活性化回路に、アドレス電極の代りに電圧を供給することが可能である。唯一の制約は、マイクロメカニカル・デバイスは1つ以上の新しい状態を有し得る、新しい状態を指令するデータか、あるいは動きが必要とされないことを指令するデータのいずれかと共にアドレス指定される必要があることである。この種のデバイスのアレイが用いられるとき、すべてのデバイスがアドレス指定される場合アドレス指定を容易にすることを除くと、状態を変える必要がある場合又は無い場合に、デバイスを同じ状態に維持するデータをロードすることができることは、欠点になり得る。
【0032】
同様に、上述の説明は電気信号および静電力の使用に焦点をあてている。磁界を含む任意の種類のフィールドによって活性化及び捕獲されるマイクロメカニカル・デバイスによって、同じ工程を用いることが可能である。
【0033】
本発明はここまで、マイクロメカニカル・デバイスの相補アドレス指定のための方法及び装置に関し、特定の実施例を説明してきたが、添付の特許請求の範囲において明らかにした以外は、その特定の参照例が本発明の特許請求の範囲を制限すると考えられることを意図するものではない。
【0034】
以上の説明の関して更に次の項を開示する。
(1) 第1の状態のマイクロメカニカル・デバイスを操作する方法であって、
前記デバイスの活性化回路上に前記デバイスの次の状態用のデータをロードし、
次の状態からはなれるよう平衡をシフトするように電界を操作し、
前記デバイス上の捕捉電界の力を減少させ、
前記デバイスを前記次の状態へ遷移させる信号を供給し、
前記次の状態に前記デバイスを保持するように前記捕捉電界を再び提供する工程を含む方法。
(2) 第1項に記載の方法であって、前記の操作の工程は、前記活性化回路上に相補データをロードすることを更に含む方法。
(3) 第1項に記載の方法であって、前記の操作の工程は、前記捕捉電界の極性をリバースすることによって、前記データが相補性を現すようにすることを更に含む方法。
(4) 第1項に記載の方法であって、前記次の状態が、前記第1の状態と実質的に同じ状態である方法。
(5) 第1項に記載の方法であって、前記次の状態が、前記第1の状態と異なる状態である方法。
(6) マイクロメカニカル・デバイス12を操作する方法。デバイスは第1の状態にある。デバイスの次の状態がそのデバイスが現在あるのと同じ状態であるか、又は第1の状態とは異なる状態であるデバイスの活性化回路18a,18b上に、デバイスの次の状態のためのデータがロードされる。そのデータが次の状態の真のデータと相補性を現すようにすることによって、デバイスの平衡が次の状態から開放されてシフトされる。捕捉電界が取除かれ又は下げられ、遷移を始める信号が供給されるとき、デバイスは新しい状態へ移動し、捕捉電界が再び提供される。真のデータに対する補数をロードすることによって、又は捕捉電界の極性をリバースすることによって、相補的であるようにデータを作ることが可能である。
【図面の簡単な説明】
【図1】活性化データに従って、1つの安定状態から別の状態へ移動する先行技術のマイクロメカニカル・デバイスの断面図を示す図。
【図2】新しいデータによって指令された状態へ遷移するマイクロメカニカル・デバイスの先行技術のシーケンスを示す図。
【図3】マイクロメカニカル・デバイス遷移のための改良されたシーケンスの一実施例を示す図。
【図4】マイクロメカニカル・デバイス遷移のための改良されたシーケンスの第2の実施例を示す図。
【図5】本発明の上述の実施例の波形の例を示す図。
【符号の説明】
12 マイクロメカニカル・デバイス
18a,18b アドレス指定電極
Claims (3)
- 第1の状態から次の状態へマイクロメカニカル・デバイスを遷移させる方法であって、当該次の状態は前記マクロメカニカル・デバイスが前記第1の状態と同じ物理的位置に位置するか又は前記第1の状態から逆側の物理的位置に位置することに対応し、前記マイクロメカニカル・デバイスはミラーとアドレス電極を有し、当該ミラーは前記アドレス電極との間の静電力に応答して移動可能であって、前記方法は、
前記デバイスの前記次の状態のデータを受信するのに関連して、ミラーとアドレス電極とを互いにバイアスして平衡を次の状態のために受信したデータに対応するものから反対の方向にシフトし、
次に、前記アドレス電極に関して、ミラーのバイアスを減少させ、および
次の状態にしたがって、前記ミラーとアドレス電極を相互にバイアスする、
ステップからなる方法。 - 請求項1に記載の方法において、前記ミラーをバイアスして平衡をシフトするステップは;
前記デバイスの次の状態のための受信されたデータで示された前記状態に関連する相補的データ状態に対応してアドレス電極をバイアスする、ことを特徴とする方法。 - 請求項1に記載の方法において、前記ミラーをバイアスして平衡をシフトするステップは;
前記デバイスの次の状態のための受信したデータに対応して前記アドレス電極をバイアスし、および
次に前記ミラー上の前記バイアスを反転させる、ことを特徴とする方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US1252996P | 1996-02-29 | 1996-02-29 | |
| US012529 | 1996-02-29 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPH1048543A JPH1048543A (ja) | 1998-02-20 |
| JP4222643B2 true JP4222643B2 (ja) | 2009-02-12 |
Family
ID=21755392
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP04638397A Expired - Fee Related JP4222643B2 (ja) | 1996-02-29 | 1997-02-28 | マイクロメカニカル・デバイスの相補リセット方式 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US5835336A (ja) |
| EP (1) | EP0793129B1 (ja) |
| JP (1) | JP4222643B2 (ja) |
| DE (1) | DE69733326T2 (ja) |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6795605B1 (en) * | 2000-08-01 | 2004-09-21 | Cheetah Omni, Llc | Micromechanical optical switch |
| US7116862B1 (en) | 2000-12-22 | 2006-10-03 | Cheetah Omni, Llc | Apparatus and method for providing gain equalization |
| US7145704B1 (en) | 2003-11-25 | 2006-12-05 | Cheetah Omni, Llc | Optical logic gate based optical router |
| US7339714B1 (en) | 2001-02-02 | 2008-03-04 | Cheetah Omni, Llc | Variable blazed grating based signal processing |
| US6445502B1 (en) | 2001-02-02 | 2002-09-03 | Celeste Optics, Inc. | Variable blazed grating |
| WO2004005998A1 (en) * | 2002-07-04 | 2004-01-15 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Method and apparatus for controlling deformable actuators |
| US7884988B2 (en) * | 2003-07-08 | 2011-02-08 | Texas Instruments Incorporated | Supplemental reset pulse |
| JP2006343590A (ja) | 2005-06-09 | 2006-12-21 | Fujifilm Holdings Corp | 微小電気機械素子アレイ装置及びその駆動方法 |
| JP2006346817A (ja) | 2005-06-16 | 2006-12-28 | Fujifilm Holdings Corp | 微小電気機械素子アレイ装置及びその駆動方法 |
| JP4810154B2 (ja) * | 2005-07-28 | 2011-11-09 | 富士フイルム株式会社 | 微小電気機械素子の駆動方法、微小電気機械素子アレイ及び画像形成装置 |
| US7429983B2 (en) | 2005-11-01 | 2008-09-30 | Cheetah Omni, Llc | Packet-based digital display system |
| JP2007199101A (ja) | 2006-01-23 | 2007-08-09 | Fujifilm Corp | 微小電気機械素子アレイ装置及び画像形成装置 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5096279A (en) * | 1984-08-31 | 1992-03-17 | Texas Instruments Incorporated | Spatial light modulator and method |
| US5142405A (en) * | 1990-06-29 | 1992-08-25 | Texas Instruments Incorporated | Bistable dmd addressing circuit and method |
| JP3402642B2 (ja) * | 1993-01-26 | 2003-05-06 | 松下電工株式会社 | 静電駆動型リレー |
| GB9309327D0 (en) * | 1993-05-06 | 1993-06-23 | Smith Charles G | Bi-stable memory element |
-
1997
- 1997-02-24 US US08/818,466 patent/US5835336A/en not_active Expired - Lifetime
- 1997-02-27 EP EP97103245A patent/EP0793129B1/en not_active Expired - Lifetime
- 1997-02-27 DE DE69733326T patent/DE69733326T2/de not_active Expired - Lifetime
- 1997-02-28 JP JP04638397A patent/JP4222643B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| DE69733326T2 (de) | 2006-01-26 |
| US5835336A (en) | 1998-11-10 |
| EP0793129B1 (en) | 2005-05-25 |
| DE69733326D1 (de) | 2005-06-30 |
| EP0793129A2 (en) | 1997-09-03 |
| EP0793129A3 (en) | 1998-08-12 |
| JPH1048543A (ja) | 1998-02-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4222643B2 (ja) | マイクロメカニカル・デバイスの相補リセット方式 | |
| US6590549B1 (en) | Analog pulse width modulation of video data | |
| US7760197B2 (en) | Fabry-perot interferometric MEMS electromagnetic wave modulator with zero-electric field | |
| US7249856B2 (en) | Electrostatic bimorph actuator | |
| US5490009A (en) | Enhanced resolution for digital micro-mirror displays | |
| KR20010070383A (ko) | 디지털 마이크로 기계 장치의 아날로그 펄스 폭 변조 셀 | |
| US6891657B2 (en) | Damped control of a micromechanical device | |
| US6985278B2 (en) | Damped control of a micromechanical device | |
| JPH09189871A (ja) | デジタルマイクロミラーリセット方法 | |
| JP4721255B2 (ja) | 光偏向装置アレイおよび画像投影表示装置 | |
| JP2008178206A (ja) | アクチュエータ駆動装置およびカメラ装置 | |
| KR100412005B1 (ko) | 개선된dmd제어용다중바이어스레벨리셋파형을제공하는공간광변조기및그동작방법 | |
| US7023124B2 (en) | Micro-actuator array, micro-actuator device, optical switch, array, and optical switch system | |
| US20060267450A1 (en) | Impact drive actuator | |
| US7427877B2 (en) | Level shift circuit, and actuator apparatus and optical switch system using same | |
| US7446928B2 (en) | Micro-electro-mechanical systems element array device and image forming apparatus | |
| US7319552B2 (en) | Micro-electro mechanical light modulator device | |
| US7480089B2 (en) | Micromirror system with electrothermal actuator mechanism | |
| US7973999B2 (en) | System for on-chip actuation | |
| CN111474805A (zh) | 一种mems镜头驱动器 | |
| Perregaux et al. | High-speed micro-electromechanical light modulation arrays | |
| WO2003079091A1 (en) | An adressing method of moveable microelements in a spatial light modulator (slm) for pattering of a workpiece | |
| JP2007074826A (ja) | 微小電気機械素子及び微小電気機械素子アレイ | |
| JP2001281567A (ja) | 光スイッチングデバイス及び画像表示装置 | |
| JP2006078969A (ja) | エレクトレットアクチュエータ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20040227 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20060731 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20060808 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20061108 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20061113 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070130 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20070306 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20081118 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111128 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111128 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121128 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121128 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131128 Year of fee payment: 5 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |