JP4154635B2 - センサレス・ブラシレスdcモータ制御装置 - Google Patents
センサレス・ブラシレスdcモータ制御装置 Download PDFInfo
- Publication number
- JP4154635B2 JP4154635B2 JP15105899A JP15105899A JP4154635B2 JP 4154635 B2 JP4154635 B2 JP 4154635B2 JP 15105899 A JP15105899 A JP 15105899A JP 15105899 A JP15105899 A JP 15105899A JP 4154635 B2 JP4154635 B2 JP 4154635B2
- Authority
- JP
- Japan
- Prior art keywords
- motor
- duty ratio
- voltage
- pwm
- brushless
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images





Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/14—Electronic commutators
- H02P6/16—Circuit arrangements for detecting position
- H02P6/18—Circuit arrangements for detecting position without separate position detecting elements
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/50—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells
- B60L50/60—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells using power supplied by batteries
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/14—Electronic commutators
- H02P6/16—Circuit arrangements for detecting position
- H02P6/17—Circuit arrangements for detecting position and for generating speed information
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/64—Electric machine technologies in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Life Sciences & Earth Sciences (AREA)
- Sustainable Development (AREA)
- Sustainable Energy (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Control Of Motors That Do Not Use Commutators (AREA)
Description
【発明の属する技術分野】
本発明は、センサレス・ブラシレスDCモータ制御装置に関し、たとえば電気自動車やハイブリッド自動車に搭載されるセンサレス・ブラシレスDCモータを駆動制御する装置に関する。
【0002】
【従来の技術】
ブラシレスDCモータには、回転位置センサを有するセンサ付きブラシレスDCモータ及びこのセンサを省略したセンサレス・ブラシレスDCモータがある。センサ付きブラシレスDCモータでは回転位置センサのロータ位置信号に基づいて、センサレス・ブラシレスDCモータではモータ電圧(たとえばモータの端子電圧)から推定したロータ位置に基づいて、モータ電圧の位相及び周波数及びモータ回転数を決定するのが一般的である。
【0003】
このセンサレス・ブラシレスDCモータの回転数を目標値にフィードバック制御するには、検出したモータ電圧に基づいて決定したロータ位置から推定したモータ回転数と目標値との比較結果に基づいてPWM制御によりモータ電圧の平均値を増減してなされる。
具体的には、モータ回転数と目標値との比較結果に応じて、デューティ比の今回値を、モータ回転数と目標値との差に応じた大きさの増減デューティ比又は一定の単位デューティ比だけデューティ比の前回値から増減して行う。
【0004】
なお、センサレス・ブラシレスDCモータのモータ回転数はロータ位置検出の信号周期から演算するのが一般的である。
【0005】
【発明が解決しようとする課題】
本発明者らは、上述した従来のセンサレス・ブラシレスDCモータ制御により、たとえば電気自動車やハイブリッド自動車に用いる場合、車両の回生制動時にバッテリ電圧すなわち直流電源電圧は急上昇するため次の問題が生じることを見出した。
【0006】
すなわち、前述したようにセンサレス・ブラシレスDCモータでは、ロータ位置はモータ端子電圧を監視することで検出しているので、直流電源電圧の急変によりモータ端子電圧が急変すると、ロータ位置の誤検出が生じ、脱調によりモータ停止といった不具合が生じる可能性が生まれる。
特に、バッテリ容量不足により電圧が大幅に低下してモータ回転数が目標値よりも低い状態のままとなっており、その結果としてPWM制御のデューティ比が結果的に100%に張付いている場合を考える。この場合、計算上、デューティ比の今回値はデューティ比の前回値よりも高い値に算出されてしまうため、車両の回生制動などにより直流電源電圧が上昇すると、結果的にデューティ比の今回値は前回値と同じ100%のままとなってしまい、その結果、車両の回生制動による直流電源電圧すなわちバッテリ電圧上昇の影響により、出力トルクが急増したり、上記ロータ位置の誤検出を生じたりすることになってしまう。
【0007】
本発明は、上記問題点に鑑みなされたものであり、直流電源電圧の変動にもかかわらずモータの脱調などを防止して安定制御が可能なセンサレス・ブラシレスDCモータ制御装置を提供することをその目的としている。
【0008】
【課題を解決するための手段】
請求項1に記載した本発明のセンサレス・ブラシレスDCモータ制御装置によれば、インバータ回路をPWM制御する制御部は、直流電源電圧変動の影響を低減したモータ電圧を用いてロータ位置の検出を行うので、従来のセンサレス・ブラシレスDCモータ制御装置に比べて直流電源電圧の変動にもかかわらず格段に高精度にロータ位置を検出することができ、ロータ位置の誤検出による誤ったモータ電圧(指令値)の位相、周波数制御を防止してモータの脱調などを良好に防止可能なセンサレス・ブラシレスDCモータ制御装置を実現することができる。
【0009】
また、ロータ位置に基づいてモータ回転数を検出する場合でも、検出するモータ回転数の精度が向上するので、検出モータ回転数と目標値との差によりデューティ比を制御するフィードバック回転数制御の安定性を向上することができる。
【0011】
請求項1記載の構成によれば更に、インバータ回路のデューティ比(出力デューティ比ともいう)が100(%)となってから100(%)を下回るまでの間だけ前記目標値をモータ回転数の今回値に一時的に設定する(すなわち、制御部がデューティ比100%を算出するようにする)。そして、出力デューティ比が100(%)を下回った後、目標値を本来の値に徐々に復帰させる。なお、インバータ回路のデューティ比(出力デューティ比)100%以上の値をもち得ないので、出力デューティ比100%において制御部が算出するデューティ比(算出デューティ比)が100%以上となる場合も、インバータ回路の出力デューティ比は100%となる。
【0012】
このようにすれば、たとえばバッテリ(直流電源)の容量不足により直流電源電圧が低下して、モータ回転数が目標値よりも低い状態のままとなっており、その結果としてPWM制御の出力デューティ比が結果的に100%に張付いている状態が生じると、一時的な目標値の低下により制御部が算出する算出デューティ比は100%となり、その結果、直流電源電圧が上昇すると、この直流電源電圧上昇に応じて請求項1又は2の制御によりモータ電圧又はそれに対応するデューティ比をただちに低下させることができるので、従来のようにこの直流電源電圧上昇時に出力デューティ比が100%に張付いたままとなり、それにより直流電源電圧上昇に応じてモータ電圧が上昇して、ロータ位置の誤検出やトルクの好ましくない増大が生じるということを良好に抑止することができる。
【0013】
【発明を実施するための態様】
本発明の好適な態様を以下の実施例により具体的に説明する。
【0014】
【実施例1】
実施例1のセンサレス・ブラシレスDCモータ制御装置を、その回路図を示す図1を参照して以下具体的に説明する。
(全体構成)
1はインバータ装置、2はセンサレス・ブラシレスDCモータ、3は電気自動車の高圧電源、11はインバータ回路であり、インバータ回路11は三相全波ブリッジ構成となっている。
【0015】
インバータ回路11において、11a〜11cは上アームの半導体スイッチング素子(ここではIGBT)、11d〜11fは下アームの半導体スイッチング素子(ここではIGBT)、11g〜11mは還流ダイオ−ドであるが、インバータ回路11の上記構成は周知であるので、これ以上の説明は省略する。
12は高圧電源の直流電源電圧を検出する機能を有する入力電圧検出器、13はモータ電圧に基づいてセンサレス・ブラシレスDCモータ2のロータ位置を示すパルス信号(ロータ位置信号)を検出する機能を有するロータ位置検出回路、14はロータ位置検出信号周期からその逆数としてのモータ回転数を検出する機能を有する回転数検出器、15はたとえば外部から指示されたモータ回転数の目標値を保持してこのモータ回転数の目標値を出力するとともに、デューティ比判定装置19から出力される判定結果に基づいて目標値を一時的に変更する機能を有する回転数指令器、16は検出したモータ回転数と上記目標値との間の偏差を演算し、それに基づいてこの偏差を減らす方向にモータ電圧の増大又は減少を指令するためのモータ電圧指令値を形成する機能を有する回転数制御装置、17は回転数制御装置16から出力されるモータ電圧指令値を保持する記憶装置であり、回転数制御装置16は上記偏差に基づいてそれを解消する方向に記憶装置17が保持するモータ電圧指令値を次のように制御する。すなわち、モータ回転数が目標値より低い場合には一定の単位デューティ比に相当する一定の単位モータ電圧指令値を現在のモータ電圧指令値に加算してモータ電圧指令値の今回値とし、モータ回転数が目標値より高い場合には一定の単位デューティ比に相当する一定の単位モータ電圧指令値を現在のモータ電圧指令値から減算してモータ電圧指令値の今回値とする。
【0016】
18は、入力電圧検出器12が出力するバッテリ電圧(直流電源電圧)と、記憶装置17が保持するモータ電圧指令値とに基づいてインバータ回路11のデューティ比(出力デューティ比)を演算し、このデューティ比と所定の搬送周波数をもつPWM信号PWMを出力する機能を有するPWM演算装置、19は、PWM演算装置18が出力するPWM信号PWMのデューティ比が100%か否かを判定するデューティ比判定装置、20は、ロータ位置検出回路13が検出したロータ位置信号と、PWM演算装置18から出力されるPWM信号PWMとに基づいて半導体スイッチング素子11a〜11fを断続制御するためのゲート制御電圧(ゲート電圧)を形成する駆動信号生成装置である。
【0017】
インバータ装置1は、インバータ回路11と、それ以外の回路から構成される本発明でいう制御部とからなる。ロータ位置検出回路13、回転数指令器15、PWM演算装置18、デューティ比判定装置19、駆動信号生成装置20以外の上記各装置はブラシレスDCモータのインバータ制御装置として周知であるので、説明は省略する。
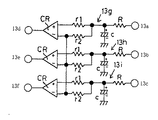
(ロータ位置検出回路13の構成)
ロータ位置検出回路13の一例を図2に示す。
【0018】
13a,13b,13cは各相のモータ電圧の入力端、13d,13e,13fは各相のロータ位置検出信号の出力端、13g,13h,13iは各相のロータ位置検出回路である。
各ロータ位置検出回路13g,13h,13iは同一回路構成を有し、それぞれ抵抗RとコンデンサCとからなりPWM制御によるキャリヤ周波数を除去する積分回路と、抵抗r1、r2と、コンパレータCRとからなる。各コンパレータCRの−入力端はそれぞれ抵抗r2を通じて積分回路の出力端に接続されるとともに相互に渡りをとることにより各相のモータ電圧の平均電圧の和が入力され、各コンパレータCRの+入力端にはそれぞれ抵抗r1を通じて各積分回路の出力端に個別に接続されている。これにより、各コンパレータCRは、各相のモータ電圧が上記各相のモータ電圧の平均電圧の和より大きい場合にハイレベルとなる3つのロータ位置信号P1、P2、P3を出力する。
(駆動信号生成装置20の構成)
駆動信号生成装置20の一例を図3に示す。
【0019】
駆動信号生成装置20は、ロータ位置検出回路13の出力端13d,13e,13fから出力される各相のロータ位置検出信号P1、P2、P3と、PWM演算装置18から出力されるPWM信号PWMに基づいてIGBT11a〜11fを開閉するためのゲート制御電圧20a〜20fを形成する論理回路であり、これら信号の関係は、図4に示すタイミングチャートにより示される。
【0020】
簡単に説明すると、駆動信号生成装置20は、PWM信号PWM(図4では、三つのゲート制御電圧20a、20b、20cを合計した信号となる)をロータ位置検出信号P1、P2、P3の所定の論理関係が満足される期間だけ周期的にゲート制御電圧20a、20b、20cとして出力する。
(回転数指令器15、PWM演算装置18およびデューティ比判定装置19の構成)
回転数指令器15、PWM演算装置18およびデューティ比判定装置19は、レスポンスの点で実際にはハードウエア回路で構成されることが好適であるが、この実施例はマイコンのソフトウエアで構成したとしてその機能を図4、図5に示すフローチャートを参照して説明する。
(PWM演算装置18の構成)
PWM演算装置18は、まずバッテリ電圧(直流電源電圧)とモータ電圧指令値とを読み込んで(S100)、それらからインバータ回路11のデューティ比(出力デューティ比)を演算する(S102)。この演算は、具体的には、次の式を計算するものである。
【0021】
デューティ比信号DUTY=(モータ電圧指令値/バッテリ電圧)・100(%)
ただし、モータ電圧指令値がバッテリ電圧に達している状態でもなおモータ回転数が目標値より低い状態では、回転数制御装置16が単位モータ電圧指令値をこのモータ電圧指令値に更に追加するためにデューティ比(算出デューティ比)が100%を超えるので、算出デューティ比が100%以上かどうかを調べて(S104)、その場合にはデューティ比(出力デューティ比)を100%とし(S106)、得られたデューティ比をもつPWM信号PWMを出力する(S108)。S108は、PWM信号PWMは、一定パルス周期で上記デューティ比をもつパルス信号を形成する処理であるステップである。
【0022】
なお、PWM演算装置18はハードウエア回路でも構成でき、たとえば、割り算回路によりモータ電圧指令値/バッテリ電圧に相当する電圧を求め、この電圧と鋸歯状波発生回路から出力される鋸歯状電圧とをコンパレータに入力してPWM電圧PWMを形成すればよい。
(デューティ比判定装置19の構成)
デューティ比判定装置19は、PWM演算装置18から入力されるPWM電圧PWMのデューティ比が100%か否かを判定し(S104)、判定結果を回転数指令器15に出力する(S110)。
(回転数指令器15の構成)
回転数指令器15は、外部から指示されたモータ回転数の目標値を保持してこのモータ回転数の目標値を出力するとともに、デューティ比判定装置19から出力される判定結果に基づいて目標値を一時的に変更する。
【0023】
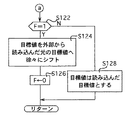
更に具体的に説明すると、まず外部から指示される目標値(目標回転数)を読み込み(S112)、デューティ比が100%かどうかを調べ(S114)、そうであれば、回転数指令器15から現在のモータ回転数を読み込んで(S116)、それを目標値とし(S118)、デューティ比が100%であることを意味するフラグFを1にセットして(S120)、定期的に実行されるメインルーチン(図示せず)にリターンする。
【0024】
S114にて、デューティ比が100%でなければ、フラグFが1かどうかを調べ(S122)、そうであれば、目標値をS112にて読み込んだ目標値へ徐々に復帰させ(S124)、フラグFを0にリセとして(S126)、メインルーチンにリターンし、S122にてフラグFが1でなければ、今回の目標値をS112にて外部から読み込んだ目標値として(S128)、メインルーチンにリターンする。
(上述の制御におけるバッテリ電圧変動がモータ電圧に与える悪影響をキャンセルするのを回避する制御動作の説明)
図6に示すタイミングチャートは、入力電圧検出器12の出力信号12a、モータ電圧(正確に言えばモータ2の相電圧)13a〜13c、ロータ位置検出器13の出力信号13d〜13f、駆動信号生成装置20の出力信号20a〜20f、PWM演算装置18の出力端18aに現れるPWM信号PWM(のデューティ比)のデューティ比DUTYの大きさを示す。
【0025】
時点Aまでは、バッテリ電圧が200Vに維持されており、この時のデューティ比DUTYは60%なので、モータ印加電圧は120Vとなる。
次に、たとえばモータ2の回生制動動作によりり時点Aから時点Bに至るまでの期間にバッテリ電圧が300Vに急上昇すると、モータ電圧13a〜13cの波高値が上昇する。
【0026】
この期間A〜Bに、デューティ比DUTYが一定であると、従来のセンサレス・ブラシレスDCモータでは、モータ電圧は300V×0.6=180Vまで急上昇して、ロータ位置検出器13が誤作動し、その出力信号すなわちロータ位置信号13d〜13fが異常となってしまい、それによりモータ電圧(三相交流電圧)の位相や周波数がモータ2の実態から離れて脱調を生じさせ、モータ制御がうまく働かない可能性が生じる。
【0027】
これに対し、この実施例では、図6に示すように、デューティ比DUTYが変化し、バッテリ電圧変化にかかわらずそれを補償してモータ電圧を120Vに保持するので、このような不具合は防止される。
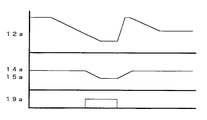
(上述の制御におけるバッテリ電圧が低下してデューティ比が100%になった時点で目標値をモータ回転数に一時的にセットし、バッテリ電圧が上昇した後、徐々に目標値を元の値に復帰させる制御動作の説明)
次に、バッテリ電圧12a、モータ回転数14a,目標値15a、デューティ比判定信号19aの関係を図7に示すタイミングチャートを参照して説明する。
【0028】
この場合では、初期状態ではバッテリ電圧12aが高いが、時間がたつにつれて徐々にバッテリ電圧12aが下降している。バッテリ電圧12aが所定値を下回ると、もはやモータ回転数は初期の目標回転数を維持できなくなり、PWM信号PWMのデューティ比DUTYは100%になり、この時点で、デューティ比判定信号19aがセットされる。すると、回転数指令器15はデューティ比判定信号19aのこの変化を検出して、目標値(目標回転数)15aを一時的に現在のモータ回転数14aにセットする。
【0029】
このようにすれば、その後、もしバッテリ電圧12aが車両の回生制動などにより上昇すれば、PWM信号PWMのデューティ比DUTYは100%未満になるので、前述したロータ位置信号13d〜13fを正常に出力することができるとともに、デューティ比判定信号19aがこのバッテリ電圧12aの上昇を受けてリセットされ、これを受けて回転数指令器15は目標回転数を徐々に増加させて、初期の目標回転数と等しくする。
【0030】
すなわち、この実施例では、バッテリ電圧12aが低下してデューティ比DUTYが100%になった時点で目標値15aをモータ回転数14aに一時的にセットしているので、その後、バッテリ電圧12aが急上昇した場合でも、モータ電圧13a、13b、13cをこのバッテリ電圧12aの急上昇を受けて低下向きに補正してこのバッテリ電圧12aの急上昇がモータ電圧13a、13b、13cを上昇させることを防止することができ、これによりこのモータ電圧13a、13b、13cをモニタしてロータ位置検出を検出してもロータ位置を誤検出することがない。更に、上記モータ電圧の補償により、モータの出力トルクがバッテリ電圧12aのこの急上昇を受けて急に増大するといった不具合も生じない。
(バッテリ電圧が低下してデューティ比が100%になっても目標値を変更しない従来の制御動作の説明)
図8は図7の制御を実施しない場合の動作を示しており、バッテリ電圧12aが低下してPWM電圧PWMのデューティ比が100%になっても目標回転数は一定値となっている。
【0031】
そのため、モータ回転数が下降すると目標値との間に大きな偏差が生じる。その後、バッテリ電圧12aが回生によって急上昇すると、モータ回転数と目標値の間に偏差があるため、デューティ比が100%のままとなってしまい、モータ電圧の急上昇が生じ、ロータ位置検出器が誤作動してモータ停止に至ってしまう。
【0032】
すなわち、従来では、バッテリ電圧が低下してデューティ比が100%になった時点でも目標値がモータ回転数よりも低ければ、その後、バッテリ電圧が急上昇した場合でも、デューティ比が100%より急には低下することができず、上述した作用効果を奏することができない。
【図面の簡単な説明】
【図1】実施例1のモータ制御装置を示すブロック回路図である。
【図2】図1に示すロータ位置検出回路の回路図である。
【図3】図1に示す駆動信号生成装置の回路図である。
【図4】図1に示す回転数指令器、PWM演算装置およびデューティ比判定装置を示すフローチャートの一部である。
【図5】図1に示す回転数指令器、PWM演算装置およびデューティ比判定装置を示すフローチャートの残部である。
【図6】実施例1のモータ制御装置の各部の動作を示すタイミングチャートである。
【図7】実施例1のモータ制御装置の各部の動作を示すタイミングチャートである。
【図8】従来のモータ制御装置の各部の動作を示すタイミングチャートである。
【符号の説明】
11はインバ−タ回路、12は入力電圧検出器(制御部)、13はロータ位置検出回路(制御部)、14は回転数検出器(制御部)、15は回転数指令器(制御部)、16は回転数制御装置(制御部)、17は記憶装置(制御部)、18はPWM演算装置(制御部)、19はデューティ比判定装置(制御部)、20は駆動信号生成装置(制御部)
Claims (1)
- 直流電源電圧をPWM制御してセンサレス・ブラシレスDCモータに印加するモータ電圧を形成するインバ−タ回路と、
前記モータ電圧から推定したロータ位置に基づいて前記モータ電圧の位相及び周波数を決定するとともにモータ回転数を検出する制御部とを備え、
前記制御部は、前記モータ回転数と所定の目標値との回転数差に基づいて前記回転数差を減らす方向に前記PWM制御のデューティ比を制御するセンサレス・ブラシレスDCモータ制御装置において、
前記制御部は、前記モータ電圧への直流電源電圧変動の影響を相殺するように補正した前記モータ電圧を用いて前記ロータ位置を推定し、かつ、
前記デューティ比が100(%)となってから100(%)を下回るまでの間だけ前記目標値をモータ回転数の今回値に一時的に設定し、前記デューティ比が100(%)を下回った後、前記目標値を本来の値に徐々に復帰させることを特徴とするセンサレス・ブラシレスDCモータ制御装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP15105899A JP4154635B2 (ja) | 1999-05-31 | 1999-05-31 | センサレス・ブラシレスdcモータ制御装置 |
| US09/576,631 US6424798B1 (en) | 1999-05-31 | 2000-05-24 | Device for controlling sensorless brushless-DC-motor |
| DE10026707A DE10026707A1 (de) | 1999-05-31 | 2000-05-30 | Vorrichtung zum Steuern eines bürstenlosen Gleichstrommotors ohne Sensor |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP15105899A JP4154635B2 (ja) | 1999-05-31 | 1999-05-31 | センサレス・ブラシレスdcモータ制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2000341982A JP2000341982A (ja) | 2000-12-08 |
| JP4154635B2 true JP4154635B2 (ja) | 2008-09-24 |
Family
ID=15510387
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP15105899A Expired - Fee Related JP4154635B2 (ja) | 1999-05-31 | 1999-05-31 | センサレス・ブラシレスdcモータ制御装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US6424798B1 (ja) |
| JP (1) | JP4154635B2 (ja) |
| DE (1) | DE10026707A1 (ja) |
Families Citing this family (34)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4211242B2 (ja) * | 2001-06-06 | 2009-01-21 | アイシン・エィ・ダブリュ株式会社 | ハイブリッド車両の制御装置 |
| JP2003200363A (ja) * | 2001-12-26 | 2003-07-15 | Makita Corp | バッテリ式電動工具 |
| US6661190B1 (en) | 2002-05-23 | 2003-12-09 | The Boeing Company | Controller and associated drive assembly controlling a brushless direct current motor |
| JP3912190B2 (ja) * | 2002-05-31 | 2007-05-09 | 松下電器産業株式会社 | ブラシレスモータの駆動装置およびそれを用いたモータ |
| US6642683B1 (en) * | 2002-08-26 | 2003-11-04 | The Boeing Company | Controller and associated drive assembly for power sharing, time sliced control of a brushless direct current motor |
| US7145300B2 (en) * | 2003-05-05 | 2006-12-05 | International Rectifier Corporation | Multi-axis AC servo control system and method |
| RU2279757C2 (ru) * | 2004-09-13 | 2006-07-10 | "Центр Разработки Нефтедобывающего Оборудования" ("Црно") | Способ управления вентильным электродвигателем и устройство для его осуществления |
| US7471055B2 (en) * | 2005-03-15 | 2008-12-30 | The Boeing Company | Controller, drive assembly and half-bridge assembly for providing a voltage |
| JP4706344B2 (ja) * | 2005-06-13 | 2011-06-22 | 株式会社デンソー | 同期モータの制御装置 |
| DE102005045284A1 (de) * | 2005-09-22 | 2007-03-29 | Pfeiffer Vacuum Gmbh | Drehzahlüberwachungsvorrichtung |
| US7402969B2 (en) * | 2006-03-23 | 2008-07-22 | Delphi Technologies, Inc | Method for producing voltage waveforms in a PWM motor controller of a PM DC brushless motor |
| JP5055934B2 (ja) * | 2006-10-06 | 2012-10-24 | パナソニック株式会社 | ブラシレスdcモータの制御装置及び換気送風機 |
| JP2008263665A (ja) * | 2007-04-10 | 2008-10-30 | Aisan Ind Co Ltd | ブラシレスモータの駆動装置及び流体ポンプ |
| RU2360354C1 (ru) * | 2007-12-04 | 2009-06-27 | Олег Анатольевич Буглаев | Вентильный электродвигатель |
| JP2010112319A (ja) | 2008-11-07 | 2010-05-20 | Denso Corp | 燃料ポンプの制御装置 |
| JP2010112320A (ja) | 2008-11-07 | 2010-05-20 | Denso Corp | 燃料供給システムの燃料ポンプ制御装置 |
| US8781786B2 (en) * | 2011-08-12 | 2014-07-15 | Stmicroelectronics Asia Pacific Pte Ltd | Spindle speed detection through current sensing during boost braking |
| DE102011080941A1 (de) * | 2011-08-15 | 2013-02-21 | Continental Teves Ag & Co. Ohg | Verfahren zur Steuerung eines elektronisch kommutierten mehrphasigen Gleichstrommotors |
| US9231504B2 (en) | 2012-05-15 | 2016-01-05 | Robert Lyle Fuller | Electrical control system |
| KR101319812B1 (ko) * | 2012-05-24 | 2013-10-17 | 삼성전기주식회사 | 모터속도 제어 장치 및 방법 |
| FR2999825B1 (fr) | 2012-12-13 | 2015-01-02 | Moving Magnet Tech | Ensemble mecatronique pour l'entrainement d'un organe exterieur utilisant un moteur sans balai et un ensemble simple de composants electroniques |
| JP6027889B2 (ja) * | 2012-12-28 | 2016-11-16 | 株式会社ミクニ | ブラシレスdcモータのセンサレス駆動装置および制御方法、並びにプログラム |
| US9225272B2 (en) * | 2013-03-04 | 2015-12-29 | Asia Vital Components Co., Ltd. | Control circuit for speed and rotational direction of fan |
| US9484828B2 (en) * | 2014-03-03 | 2016-11-01 | The Boeing Company | Power frequency converter and associated method |
| JP6256277B2 (ja) | 2014-09-24 | 2018-01-10 | 株式会社デンソー | モータ制御装置及びモータ制御方法 |
| WO2016059723A1 (ja) * | 2014-10-17 | 2016-04-21 | 三菱電機株式会社 | 送風装置および送風装置の制御方法 |
| FR3029037B1 (fr) * | 2014-11-20 | 2019-01-25 | Mmt Sa | Ensemble mecatronique pilote par un signal de couple et direction distinct du signal de puissance. |
| WO2016100884A1 (en) | 2014-12-18 | 2016-06-23 | Black & Decker Inc. | Control scheme to increase tool usage as battery drains |
| WO2017079295A1 (en) | 2015-11-02 | 2017-05-11 | Black & Decker Inc. | Reducing noise and lowering harmonics in power tools using conduction band control schemes |
| US10050574B2 (en) * | 2016-05-06 | 2018-08-14 | The Boeing Company | Management of motor regeneration |
| US10014805B2 (en) | 2016-05-06 | 2018-07-03 | The Boeing Company | Method and apparatus for adjusting motor commutation phase and period |
| US11303235B2 (en) | 2019-04-25 | 2022-04-12 | Black & Decker Inc. | Dual-controller system for a sensorless brushless motor control |
| EP4489291A3 (en) | 2019-06-10 | 2025-03-12 | Black & Decker, Inc. | Field-oriented sensorless brushless motor control in a power tool |
| EP3806273A1 (en) | 2019-10-11 | 2021-04-14 | Black & Decker Inc. | Power tool receiving different capacity batttery packs |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4546293A (en) * | 1982-08-24 | 1985-10-08 | Sundstrand Corporation | Motor control for a brushless DC motor |
| US4967188A (en) * | 1989-07-26 | 1990-10-30 | Ncr Corporation | Method for detecting low battery voltage in portable scanning systems |
| EP0508367B1 (en) * | 1991-04-09 | 1997-08-27 | Honda Giken Kogyo Kabushiki Kaisha | A braking control system for an electric vehicle |
| CN1049868C (zh) * | 1992-05-12 | 2000-03-01 | 精工埃普生株式会社 | 电动车 |
| US5291106A (en) * | 1992-11-23 | 1994-03-01 | General Motors Corporation | Single current regulator for controlled motoring and braking of a DC-fed electric motor |
| TW328190B (en) * | 1994-06-14 | 1998-03-11 | Toshiba Co Ltd | Control device of brushless motor and method of fault detection and air conditioner |
| JP3580008B2 (ja) * | 1996-02-21 | 2004-10-20 | 日産自動車株式会社 | 電気自動車用電動流体圧式動力舵取装置 |
| US5744921A (en) * | 1996-05-02 | 1998-04-28 | Siemens Electric Limited | Control circuit for five-phase brushless DC motor |
| JPH10225167A (ja) | 1997-02-06 | 1998-08-21 | Zexel Corp | ブラシレスモータの駆動制御装置 |
| US6034494A (en) * | 1998-01-20 | 2000-03-07 | Denso Corporation | Control device for brushless DC motor |
| JPH11356081A (ja) | 1998-06-09 | 1999-12-24 | Matsushita Electric Ind Co Ltd | インバータ装置 |
| IT1304682B1 (it) * | 1998-10-08 | 2001-03-28 | Gate Spa | Procedimento e dispositivo per rilevare la velocita' di rotazione diun motore elettrico a corrente continua pilotato con un segnale di |
-
1999
- 1999-05-31 JP JP15105899A patent/JP4154635B2/ja not_active Expired - Fee Related
-
2000
- 2000-05-24 US US09/576,631 patent/US6424798B1/en not_active Expired - Fee Related
- 2000-05-30 DE DE10026707A patent/DE10026707A1/de not_active Ceased
Also Published As
| Publication number | Publication date |
|---|---|
| DE10026707A1 (de) | 2001-02-08 |
| JP2000341982A (ja) | 2000-12-08 |
| US6424798B1 (en) | 2002-07-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4154635B2 (ja) | センサレス・ブラシレスdcモータ制御装置 | |
| US11387766B2 (en) | Control circuit for electric power converter | |
| JP6169203B1 (ja) | 電動機制御装置および電動機制御方法 | |
| US8947838B2 (en) | Overcurrent fault detection device for electrical drive control system | |
| KR101605990B1 (ko) | 인버터 벡터 구동 시스템 및 그것을 이용한 커패시터 용량 추정 방법 | |
| JP7140045B2 (ja) | 駆動回路 | |
| US20170163201A1 (en) | Control device for in-vehicle electric motor | |
| US20200307383A1 (en) | In-vehicle control apparatus and program | |
| WO2021240190A1 (ja) | 電源システム及び電源システムの制御方法 | |
| JP5263067B2 (ja) | インバータの故障検出装置 | |
| JP2003009573A (ja) | 車両用同期機の制御装置 | |
| JP6983305B2 (ja) | 車両制御装置 | |
| JP6289597B1 (ja) | 車両用電源装置および車両用電源装置の制御方法 | |
| JP7285901B2 (ja) | 電動機制御装置および電動機駆動システム | |
| JP2014121172A (ja) | 電力変換システムの故障検知装置 | |
| US20230009497A1 (en) | Method for operating an electric machine | |
| JP2021191074A (ja) | インバータ制御装置 | |
| US20250167668A1 (en) | Overheat protection control device for power converter | |
| CN113875143B (zh) | 功率转换装置和功率转换装置的控制方法 | |
| JP4147449B2 (ja) | 電源回生コンバータ | |
| CN116783809A (zh) | 逆变器装置 | |
| WO2021049230A1 (ja) | 電力変換装置、および電力変換装置の制御方法 | |
| JP7718343B2 (ja) | モータ制御装置 | |
| US20250105724A1 (en) | Power conversion device and drive device | |
| JP2010239812A (ja) | 電源装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050608 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20071017 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20071023 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20071220 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20080612 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20080625 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110718 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120718 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120718 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130718 Year of fee payment: 5 |
|
| LAPS | Cancellation because of no payment of annual fees |