JP4135158B2 - 車両の前後輪舵角制御装置 - Google Patents
車両の前後輪舵角制御装置 Download PDFInfo
- Publication number
- JP4135158B2 JP4135158B2 JP2005164139A JP2005164139A JP4135158B2 JP 4135158 B2 JP4135158 B2 JP 4135158B2 JP 2005164139 A JP2005164139 A JP 2005164139A JP 2005164139 A JP2005164139 A JP 2005164139A JP 4135158 B2 JP4135158 B2 JP 4135158B2
- Authority
- JP
- Japan
- Prior art keywords
- angle
- target
- vehicle
- turning
- rear wheel
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images















Landscapes
- Power Steering Mechanism (AREA)
- Steering-Linkage Mechanisms And Four-Wheel Steering (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
Description
車両上に固定された座標原点。車両上の任意の位置に基準点を取ることができるが、通常、計算の容易なように、前車軸の2等分点と後車軸の2等分点とを結ぶ線分の2等分点を基準点に選ぶ。車両の重心点を基準点と選んでもよい。
図12に示すように、車両に固定して原点、x,y軸を定めた座標。以下では、車両上の基準点(後述)を原点にとり、x軸を車両前方,y軸を車両側方に図12の通りにとる。ここでy軸については、車両の旋回方向を正にとるものとする(図12では右旋回しているので、右側を正にとる)。左旋回中には左側を正にとる。
車両上の基準点(後述)の走行する向きに対する車両の進行方向前方(図12x軸)の成す角βとし、車両旋回周りの向きを正にとったものと定義する。図12では右旋回中なので右周り(時計周り)を正にとる。左旋回中には左回り(反時計周り)を正にとる。
図12で、x軸と各車輪との成す角(前右輪の転舵角は図示δfr)。
車両の前後輪転舵角を一定としたまま旋回した場合に、旋回中心となる車両固定座標上の点。
車両上の基準点(後述)と転舵中心との距離R。
車両上の基準点(後述)と転舵中心とを結ぶ線と、車両上の基準点(後述)から車両横方向(y軸と平行)に延ばした線との成す角。車両進行方向への回転角を正にとる(右旋回時は、反時計周りが正の向き。左旋回時は時計周りが正の向き)。
1/R=1/Re+δβ/δz …(1)
かつ、転舵中心仰角を略βとする点Qを転舵中心とするように目標転舵角を演算するようにした。本発明者らの検討により、車両の基準点Pの旋回半径Reと、転舵中心半径Rと、車両基準点の移動距離δzと、その間の車両の姿勢角変化δβとの関係は、定量的に略(1)式で表わされることがわかっている。また、車両基準点の姿勢角は、転舵中心の移動に関わらず転舵中心仰角と略一致することもわかっている。
dz=z−zold …(2)
式(2)で求める。
dθ=β−θold …(3)
式(3)で求める。
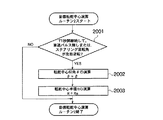
そして、ステップ1905では、その値で転舵中心仰角の変化dθを制約する。
R=1/(dθ/dz+1/Re) …(5)
で演算し、本ルーチンを終了する。
2 後輪
3 ステアリングホイール
4 操舵角センサ
5 前輪操舵アクチュエータ
6 後輪操舵アクチュエータ
7 舵角センサ
8 舵角センサ
9 車速センサ
10 ヨーレートセンサ
12 前後輪舵角制御装置
13 駆動回路
Claims (7)
- 前輪の転舵角と後輪の転舵角とをそれぞれ独立に制御する装置を備えた車両の前後輪舵角制御装置において、
ステアリング操作量に基づいて、車両上の基準点Pの目標旋回半径Reを算出する目標旋回半径演算手段と、
前記基準点Pの目標姿勢角βを算出する目標姿勢角演算手段と、
前記目標旋回半径Reと前記目標姿勢角βに基づいて前後輪の目標転舵角を演算すると共に、目標姿勢角βを大きくする間は、目標姿勢角一定の場合の前後輪目標転舵角に対して、転舵中心点Qが車両に近づく向きに前記目標転舵角を補正し、目標姿勢角βを小さくする間は、目標姿勢角一定の場合の前後輪目標転舵角に対して、転舵中心点Qが車両から遠ざかる向きに前記目標転舵角を補正し、演算する目標転舵角演算手段と、
を備えたことを特徴とする車両の前後輪舵角制御装置。 - 前輪の転舵角と後輪の転舵角とをそれぞれ独立に制御する装置を備えた車両の前後輪舵角制御装置において、
ステアリング操作量に基づいて算出された車両上の基準点Pの目標旋回半径Reと、前記基準点Pの目標姿勢角βとに基づいて、前後輪の目標転舵角を演算すると共に、
目標姿勢角を大きくする間は、目標姿勢角βが一定の場合の目標転舵角に対して、転舵中心点Qが車両に近づく向きに前記目標転舵角を補正し、
目標姿勢角を小さくする間は、目標姿勢角βが一定の場合の目標転舵角に対して、転舵中心点Qが車両から遠ざかる向きに前記目標転舵角を補正する目標転舵角演算手段と、
を備えたことを特徴とする車両の前後輪舵角制御装置。 - 前記目標転舵角演算手段は、転舵中心半径Rを、目標旋回半径Reと車両基準点Pの移動距離δzに対する目標姿勢角の変化量δβ/δzに応じて略1/R=1/Re+δβ/δzとし、かつ、転舵中心仰角θを略βとする点Qを転舵中心点とするように目標転舵角を演算することを特徴とする請求項1または請求項2記載の車両の前後輪舵角制御装置。
- 前記目標姿勢角演算手段は、前記基準点Pの移動距離δzに対する目標姿勢角変化量δβ/δzが急変しないように目標姿勢角を演算することを特徴とする請求項1記載の車両の前後輪舵角制御装置。
- 車両上のある点が一定距離移動するごとにパルスを出力する車速センサを少なくとも1つ有すると共に、前記目標転舵角演算手段は、その車速センサのパルスに同期して演算を実行することを特徴とする請求項1ないし請求項4のいずれか1項記載の車両の前後輪舵角制御装置。
- 車両の移動速度を検出する車速検出手段を備え、
前記目標転舵角演算手段は、車両がほぼ停止しているとみなせる状態にあっては、目標姿勢角の変化の向き及び割合によらず、転舵中心半径RがReと一致し、転舵中心仰角θがβとなる点Qから目標転舵角を演算することを特徴とする請求項1ないし請求項5のいずれか1項記載の車両の前後輪舵角制御装置。 - 前記目標転舵角演算手段は、前記基準点Pの移動距離δzに対する転舵中心仰角θの変化量δθ/δzの上限値を、目標姿勢角と目標旋回半径Reに応じて制限するように目標転舵角を演算することを特徴とする請求項1ないし請求項6のいずれか1項記載の車両の前後輪舵角制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005164139A JP4135158B2 (ja) | 2000-03-23 | 2005-06-03 | 車両の前後輪舵角制御装置 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2000082465 | 2000-03-23 | ||
| JP2005164139A JP4135158B2 (ja) | 2000-03-23 | 2005-06-03 | 車両の前後輪舵角制御装置 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2000295051A Division JP3707379B2 (ja) | 2000-03-23 | 2000-09-27 | 車両の前後輪舵角制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005255170A JP2005255170A (ja) | 2005-09-22 |
| JP4135158B2 true JP4135158B2 (ja) | 2008-08-20 |
Family
ID=35081299
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005164139A Expired - Fee Related JP4135158B2 (ja) | 2000-03-23 | 2005-06-03 | 車両の前後輪舵角制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4135158B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4433060B2 (ja) * | 2008-02-18 | 2010-03-17 | トヨタ自動車株式会社 | 駐車支援装置 |
| US9469339B2 (en) | 2014-12-12 | 2016-10-18 | Hyundai Motor Company | Apparatus for controlling rear wheel steering using driving behavior signal feedback and method for the same |
| JP7444091B2 (ja) * | 2021-01-29 | 2024-03-06 | 株式会社デンソー | 転舵制御装置 |
-
2005
- 2005-06-03 JP JP2005164139A patent/JP4135158B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2005255170A (ja) | 2005-09-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3740970B2 (ja) | 車両の前後輪舵角制御装置 | |
| JP3690311B2 (ja) | 車両の前後輪舵角制御装置 | |
| JP4441909B2 (ja) | 車両制御装置 | |
| JP3707379B2 (ja) | 車両の前後輪舵角制御装置 | |
| JP6332167B2 (ja) | 車線維持支援装置 | |
| CN102421615B (zh) | 后轮束角控制装置及后轮束角控制装置中的电动致动器的基准位置校正方法 | |
| EP2213547B1 (en) | Rear-wheel steering vehicle | |
| US7315772B2 (en) | Motion control apparatus and method for automotive vehicle | |
| JP6106012B2 (ja) | 操舵制御装置 | |
| EP3789271B1 (en) | Control device and steering device | |
| JP3714269B2 (ja) | 自動操舵装置 | |
| CN111216785B (zh) | 用于控制车辆的转向系统的装置和方法 | |
| JP2012020652A (ja) | サーボ制御装置 | |
| JP5170496B2 (ja) | 電動パワーステアリング装置 | |
| JP4135158B2 (ja) | 車両の前後輪舵角制御装置 | |
| JP4604399B2 (ja) | 車両の操舵制御装置 | |
| JP5313760B2 (ja) | 後輪トー角制御装置および電動アクチュエータの基準作動量設定方法 | |
| JP5617499B2 (ja) | 車両用舵角制御装置 | |
| JPH07246948A (ja) | 車両運動状態量補正装置 | |
| JP2008174168A (ja) | 車両の後輪転舵制御装置 | |
| JP2940372B2 (ja) | 車両用補助舵角制御装置 | |
| JP2770505B2 (ja) | 車両の後輪舵角制御装置 | |
| JP5088008B2 (ja) | 車体スリップ角制御装置及びプログラム | |
| JPH06273444A (ja) | 検出ヨーレイト補正装置 | |
| JP2001191939A (ja) | 車両用軌道制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080401 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080411 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20080509 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20080522 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110613 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120613 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120613 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130613 Year of fee payment: 5 |
|
| LAPS | Cancellation because of no payment of annual fees |