JP4110929B2 - 電気掃除機 - Google Patents
電気掃除機 Download PDFInfo
- Publication number
- JP4110929B2 JP4110929B2 JP2002320900A JP2002320900A JP4110929B2 JP 4110929 B2 JP4110929 B2 JP 4110929B2 JP 2002320900 A JP2002320900 A JP 2002320900A JP 2002320900 A JP2002320900 A JP 2002320900A JP 4110929 B2 JP4110929 B2 JP 4110929B2
- Authority
- JP
- Japan
- Prior art keywords
- dust
- electric blower
- amount
- detecting
- interval
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images










Landscapes
- Electric Vacuum Cleaner (AREA)
Description
【発明の属する技術分野】
本発明は、一般家庭用、もしくは業務用の電気掃除機の制御に関するものである。
【0002】
【従来の技術】
図11に、従来の電気掃除機の概略構成図を示す。
【0003】
1は電気掃除機本体であり、2は本体1に内蔵し、吸い込み力を発生する電動送風機であり、3は、操作手段4を有したホースであり、5は延長管であり、6は床面に接して床面の塵埃等を吸引するための床用吸い込み具であり、床面の塵埃を掻き上げる回転ブラシ7と、回転ブラシ7を回転駆動する電動機8を内蔵している。
【0004】
本体1には、塵埃を蓄積しておく塵埃捕集手段である集塵室9と、吸い込み口10と連通口11を有しており、電動送風機2の吸気口へは、連通口11を介して集塵室9から吸引風が流入する。ホース3は、本体1の吸い込み口10と、着脱自在に接続される構成となっている。12は、本体1と商用電源を接続して、商用電源から電気掃除機へと電力を導くための電源コンセントである。電源コンセント12が商用電源に接続された状態で、使用者が操作手段4を操作し、制御手段(図示せず)により電動送風機2が動作を開始して、吸引風が発生すると、床用吸い込み具6、延長管5、ホース3、吸い込み口10、集塵室9、連通口11を経由して、電動送風機2に吸引風が流入する。これらで、吸気経路を構成している。また、近年では、集塵室9内に塵埃のフィルターも兼ねた塵埃捕集手段である集塵袋を装着して、吸引風が集塵袋を経由することにより、塵埃を含んだ吸引風が集塵袋で濾過され、塵埃のみが集塵袋に蓄積されるものが主流になっている。
【0005】
このように、電動送風機2に対して、吸気経路の上流側に塵埃捕集手段である集塵袋などのフィルターを装着すると、吸引風が流れる部位に塵埃等が付着し、目詰まりが発生して、吸引力が低下するため、集塵袋やフィルターを除塵して吸引力を回復するものが出願されている(例えば、特許文献1、特許文献2参照)。
【0006】
【特許文献1】
特開平5−91962号公報
【特許文献2】
実公昭60−20358号公報
【0007】
【発明が解決しようとする課題】
しかしながら上記従来技術においては、塵埃捕集手段に対する除塵の時期が使用者に依存するものであったり、また、機器の動作に対して、最適な時期での除塵動作を行っていないため、大きな除塵効果が得られないものであった。また、頻繁な除塵により、塵埃捕集手段である集塵袋やフィルターの耐久性に悪影響を与えるという課題を有していた。
【0008】
本発明は、上記課題を解決するもので、機器の動作状態に合わせて、塵埃捕集手段に対して除塵を行っても、塵埃捕集手段の耐久性を確保し、且つ、高い除塵効果を得られるよう最適な塵埃捕集手段に対する除塵が行える電気掃除機を提供することを目的とする。
【0009】
【課題を解決するための手段】
上記目的を達成するために本発明は、吸引風を発生する電動送風機と、吸引された塵埃を捕集する塵埃捕集手段と、前記塵埃捕集手段に付着した塵埃を除塵する除塵手段と、前記除塵手段の動作を制御する除塵制御手段と、機器の使用状態を検出する状態検出手段とを備え、前記除塵制御手段が、前記状態検出手段が検出した状態に基づいて、前記除塵手段の動作間隔を可変する構成とし、前記電動送風機の入力が高く、吸引する塵埃量が多い時は、前記除塵制御手段が除塵手段を動作させる間隔を短くし、吸引能力を維持できるようにするとともに、入力が低く、吸引する塵埃が少ない時は、間隔を長くしてなるものである。
【0010】
これにより、使用者の操作に依存せず、機器の動作状況に基づいて、前記塵埃捕集手段への塵埃の付着度合いや、塵埃の状況等により、必要とされる量の除塵を行うので、前記塵埃捕集手段の耐久性に悪影響を与えることなく、高い除塵効果を得ることができる。
【0011】
【発明の実施の形態】
本発明の請求項1記載の発明は、吸引風を発生する電動送風機と、吸引された塵埃を捕集する塵埃捕集手段と、前記塵埃捕集手段に付着した塵埃を除塵する除塵手段と、前記除塵手段の動作を制御する除塵制御手段と、機器の使用状態を検出する状態検出手段とを備え、前記状態検出手段を、前記電動送風機の入力を検出する電動送風機入力検出手段で構成し、前記除塵制御手段が、前記電動送風機入力検出手段が検出した入力値に基づいて、前記除塵手段の動作間隔を可変する構成とし、前記電動送風機の入力が高く、吸引する塵埃量が多い時は、前記除塵制御手段が除塵手段を動作させる間隔を短くし、吸引能力を維持できるようにするとともに、入力が低く、吸引する塵埃が少ない時は、間隔を長くするもので、前記電動送風機の入力が高く、吸引する塵埃量が多い時は、除塵制御手段が除塵手段を動作させる間隔を短くし、吸引能力を維持できるようにするとともに、入力が低く、吸引する塵埃が少ない時は、間隔を長くすることで、前記塵埃捕集手段の耐久性に悪影響を与えることなく、高い除塵効果を得ることができる。
【0012】
本発明の請求項2記載の発明は、吸引風を発生する電動送風機と、吸引された塵埃を捕集する塵埃捕集手段と、前記塵埃捕集手段に付着した塵埃を除塵する除塵手段と、前記除塵手段の動作を制御する除塵制御手段と、機器の使用状態を検出する状態検出手段を備え、前記状態検出手段を、吸引された塵埃の量を検出する塵埃量検出手段としての風量検出手段または圧力検出手段または温度検出手段で構成し、前記除塵制御手段が、前記塵埃量検出手段が検出した塵埃の量に基づいて、除塵手段の動作間隔を可変する構成とし、吸引風量が低くなるほどまたは真空圧が高くなるほどまたは電動送風機とその近傍の温度が高くなるほど、除塵手段を動作させる間隔を短くし、除塵の頻度を上げるようにしたもので、前記塵埃捕集手段の耐久性に悪影響を与えることなく、高い除塵効果を得ることができる。また、吸引される塵埃量に対して、高精度で除塵の頻度を設定することができる。
【0013】
【実施例】
(実施例1)
以下本発明の第1の実施例を、図1〜図3を参照しながら説明する。なお、従来と同一構成部品については、同一符号を付し、説明を省略する。図1は、本実施例における電気掃除機の動作のブロック図であり、図2は構成図である。
【0014】
図1、図2において、20は電動送風機2への供給電力、すなわち入力を制御する制御手段であり、21は、除塵制御手段である振動制御手段であり、後述する電磁石24のオンとオフを制御する。
【0015】
25は除塵手段である振動装置であり、集塵室9内に装着される塵埃捕集手段としての集塵袋13を振動させる振動板23と、振動板23を動作させる電磁石24とで構成され、振動板23は、電磁石24のアクチュエータ27に取り付けられ、アクチュエータ27が動くことで、振動板23が動作する構成となっている。
【0016】
アクチュエータ27は磁石でできており、電磁石24がオンされて交流電源に接続されることにより発生する交流磁界により、交流周波数に同期して往復運動を行う。それによりアクチュエータ27に取り付けられた振動板も往復運動を行って、集塵袋13を周期的にたたく動作となり、集塵袋13の連通口11付近に付着した塵埃を除くことができる。
【0017】
制御手段20と振動制御手段21は、マイクロコンピュータ22で構成され、操作手段4から入力される、使用者が操作した信号に基づいて、電動送風機2の入力と振動装置25を制御する。26は状態検出手段であり、本実施例においては電動送風機2への供給電力、すなわち、入力を検出する入力検出手段である。28は、振動制御手段21が、振動装置25を動作を終了してからの再度開始するまでの時間を計時する間隔計時手段であり、29は状態検出手段としての動作計時手段であり、状態検出手段26、間隔計時手段28、動作計時手段29は、マイクロコンピュータ22内で構成される。
【0018】
上記構成において、その動作を説明する。
【0019】
制御手段20は、電動送風機2へ供給する電力、即ち入力のポジションとして図3に示すように「強」、「中」、「弱」と、3つの動作ポジションと、電動送風機2への供給電力を停止する「切り」の停止ポジションを有して制御している。これら4つのポジションは、使用者が操作手段4を操作することにより切り替えられる構成となっている。
【0020】
電動送風機2が動作して、吸引力が発生すると、塵埃が吸引風とともに吸い込み口10から集塵袋13に吸引される。集塵袋13は、フィルターとしての役目も果たしており、塵埃は、集塵袋13によって捕集され、塵埃を取り除いた吸引風のみが、連通口11を経由して電動送風機2に吸引され、集塵袋13に塵埃が蓄積される。この時、吸引風は必ず集塵袋13内の連通口11付近を通過するため、この近辺に最も塵埃が付着しやすくなり、目の細かい細塵は、特に付着しやすくなる。この近辺に塵埃が付着すると、集塵袋13にあまり塵埃が蓄積していなくても、吸引力が低下し、掃除の効率が悪化する。そこで、図2に示すように、振動板23で集塵袋13の連通口11付近に振動を与え、集塵袋13の連通口11付近に付着した塵埃をはたき落とすことにより、吸引風量を復帰させ、掃除の効率を維持することができる。
【0021】
集塵袋13への塵埃の付着は、電動送風機2の入力が高く、吸引風量が高いほど、付着しやすく、吸引風量を高く維持して吸引能力を維持するためには、電動送風機2の入力が低いときより頻繁な除塵が必要になる。また、電動送風機2への入力が低い状態で、高い状態と同じ頻度で除塵を行っても、頻度の割に除塵効果を得にくく、振動により集塵袋13の耐久性に悪影響を与えてしまう恐れがある。
【0022】
間隔計時手段28は、振動装置25がオフした後、時間計時を開始し、所定時間経過すると、振動制御手段21に送信することで、前記振動制御手段21は、振動装置25を再度オンさせ、その後、振動装置25の動作を終了するが、この時、間隔計時手段28の計時する時間をリセットし、間隔計時手段28は、振動装置25の動作終了時からの時間の計時を再度開始する。
【0023】
なお、前記間隔計時手段28が計時する時間は、電磁石24がオンされて交流電源に接続されることにより発生する交流磁界により、交流周波数に同期して往復運動を行う。それによりアクチュエータ27に取り付けられた振動板も往復運動を行うが、その1回の往復運動間の動作間隔でも良いし、また、複数の往復運動を1単位として、その1単位の往復運動間の動作間隔でも良い。
【0024】
状態検出手段26は、制御手段20が制御する電動送風機2への供給電力設定値を振動制御手段21に出力している。振動制御手段21は、図3中に示すように、電動送風機2の供給電力に対して、区分A、区分B、区分Cと入力レベルを区分している。ここでは、区分Aは「強」ポジション、区分Bは「中」ポジション、区分Cは「弱」ポジションとなる。それぞれの区分において、間隔計時手段28が計時し、振動装置25の動作が停止してから再度動作するまでの時間である動作間隔を決定する所定値を、区分AではTA、区分BではTB、区分CではTCを、TA<TB<TCとなるように有している。これにより、電動送風機2への供給電力が高くなるほど、振動制御手段21が振動装置25を動作させる間隔が短くなり、吸引能力を維持できるようになるとともに、供給電力が低いときは、間隔が長くなり、集塵袋13の耐久性を向上することができる。
【0025】
同様に、電動送風機2への供給電力が高くなるほど、振動制御手段21が振動装置25を動作させる強度を強くすることにより、吸引能力を維持できるようになるとともに、供給電力が低い時は、強度を弱くすることにより、集塵袋13の耐久性を向上することができる。
【0026】
また、電動送風機2の動作時間が長いと、それだけ吸引された塵埃も多く、また、集塵袋13に付着する塵埃も多くなり、動作時間が短いと逆に少なくなり、頻繁に除塵を行う必要も無く、強度を強くする必要も無くなってくる。
【0027】
動作計時手段29は、振動制御手段21が、振動装置25を動作させてからの電動送風機2の動作時間を計時しており、振動制御手段21は、動作計時手段29の計時する動作時間が長ければ、間隔計時手段28の計時する間隔時間に対して短い判定値を設定し、動作時間が短ければ、間隔時間の判定値を長く設定して判断することにより、電動送風機2の動作時間に対して、吸引能力を維持できるとともに、集塵袋13の耐久性を向上することができる。
【0028】
同様に、動作時間が短ければ、振動制御手段21が振動装置25を動作させる強度を弱く、動作時間が長ければ強く設定することにより、電動送風機2の動作時間に対して、吸引能力を維持できるとともに、集塵袋13の耐久性を向上することができる。
【0029】
(実施例2)
以下本発明の第2の実施例を、図3、図4を参照しながら説明する。なお、従来と同一構成部品については、同一符号を付し、説明を省略する。
【0030】
図4において、40は、集塵袋13に吸引される塵埃の量を検出する状態検出手段としての塵埃量検出手段であり、41は塵埃量検出手段40としての風量検出手段であり、塵埃の量が多くなると吸引風量が低下するので吸引風量に基づいて塵埃の量を検出できる。42は、塵埃量検出手段40としての圧力検出手段であり、集塵袋13の吸引風量の下流側の圧力を検出するよう設けられ、塵埃の量が多くなると真空圧が上昇するので真空圧に基づいて塵埃の量を検出できる。43は、塵埃量検出手段40としての温度検出手段であり、電動送風機2、もしくは、電動送風機2の近傍の温度を検出するよう設けられ、塵埃の量が多くなると電動送風機2の温度が上昇するので温度に基づいて塵埃の量を検出できる。
【0031】
上記構成において、その動作を説明する。
【0032】
実施例1と同様に、図3に示すように、振動制御手段21において、風量検出手段41が検出した風量に対し、区分Q1、区分Q2、区分Q3と分割し、区分Q1ではTQ1、区分Q2ではTQ2、区分Q3ではTQ3をTQ1>TQ2>TQ3となるように有して、風量が低くなるほど、つまり、塵埃量が多くなるほど、除塵の頻度を上げることにより、塵埃量に対し、最適な除塵を行うことができる。
【0033】
また、吸引した塵埃の量が多くなり、集塵室9内の真空圧が高くなると、集塵袋13にも圧力がかかるので、集塵袋13の耐久性に悪影響を及ぼしてしまう。
【0034】
そこで、同様に、塵埃量検出手段40を集塵袋13の下流側の圧力検出手段42で構成することにより、圧力に対して、真空圧が高くなるほど、つまり、塵埃量が多くなるほど、除塵の頻度を上げることにより、塵埃量に対し、最適な除塵を行うことができ、また、真空圧による集塵袋13の耐久性への影響も低減することができる。
【0035】
また、塵埃量が多くなり、吸引風量が低下してくると、電動送風機2を通過する風量も低下してくる。電動送風機2を通過する風量は、電動送風機2の冷却効果も有している。集塵袋13に付着する塵埃量が増加し、吸引風量が低下すると電動送風機2とその近傍温度は、集塵袋13に塵埃が付着していない時と比較して高くなる。温度検出手段43は、この温度を検出し、振動制御手段21は、温度検出手段43が検出した温度に対し、温度が高ければ、間隔計時手段28の計時する時間に対して判定時間を短く設定し、温度が低ければ長く設定することにより、温度に対して、温度が高くなるほど、つまり、塵埃量が多くなるほど、除塵の頻度を上げることにより、塵埃量に対し、最適な除塵を行うことができ、また、除塵を行うことにより、電動送風機2の温度を低下することができる。
【0036】
尚、除塵の頻度と同様に、振動制御手段21が振動装置25を動作させる強度を制御することにより、塵埃量に対し、最適な除塵を行うことができる。
【0037】
(実施例3)
以下本発明の第3の実施例を、図5〜図9を参照しながら説明する。なお、従来と同一構成部品については、同一符号を付し、説明を省略する。
【0038】
図5において、50は、振動制御手段21が振動装置25を動作させる時期の回数を計数する計数手段であり、51は状態検出手段としての塵埃質検出手段であり、使用者が掃除している時にどのような質の塵埃が吸引されているかを検出する。51は、更に、塵埃質検出手段としての床面検出手段であり、どのような床面で機器が使用されているかを検出する。
【0039】
塵埃質検出手段51は、図6に示すように、発光素子53と受光素子54と、受光素子54から出力される信号を判断する判断部55から構成される。発光素子53と受光素子54は、ホース3が本体1に接続される接続部56に設けられている。
【0040】
上記構成において、その動作を説明する。
【0041】
振動制御手段21は、電動送風機2が動作状態から停止状態、つまり、「強」「中」「弱」ポジションの何れかから、「停止」になって、所定の遅延時間経過した時点を、振動装置25が動作可能な時期として有しており、計数手段50の計数する回数が所定回数に到達していれば振動装置25をオンし、動作させる。この時、振動制御手段21は、計数手段の計数する回数をリセットし、計数手段50は、所定の回数の計数を再度開始する。計数手段50は、使用者が操作手段4を操作して、電動送風機2が動作状態から「停止」に移行する毎にカウントアップを行う。
【0042】
この、振動装置25をオンするタイミングは、電動送風機2による吸引風がない状態に設定されており、除塵を行う時には、1回の除塵動作で大きな除塵効果を得ることができる。
【0043】
塵埃が吸引されて、発光素子33と受光素子34の間を通過すると、受光素子34の出力Voutは、塵埃が通過していない時、即ち、受光しているときはHレベル、通過している時、即ち、受光していないと時はLレベルの信号を出力するので、Voutにおいて、図8に示すようなパルス状の電圧波形が出力される。通過する塵埃が、目が細かい細塵であれば、細塵を構成する粒子の数量は非常に多く、また、単位時間あたりに通過する量も多いので、図8(a)に示すように、パルス幅の狭い波形が出力され、比較的大きなゴミであれば、単位時間あたりに通過する量も少なく、受光素子34の受光する光を遮っている時間も長いので、図8(b)に示すように、パルス幅の広い波形が出力される。
【0044】
判断手段35は、このパルス幅を計測しており、パルス幅に対して、ゴミ質判定値Tgを有して、パルス幅がTgより短ければ、細塵のように吸引風がなくなっても集塵袋13に付着する質のごみであり、Tgより長ければ、紙屑のような大きく吸引風がなくなると集塵袋13に付着せず、除塵しやすいごみであると判断する。
【0045】
集塵袋13に吸引された塵埃は、細塵であれば、集塵袋13に付着しやすく、また、吸引風の有無に関わらず、付着した状態から除去し難い傾向があり、大きなごみは吸引風があれば集塵袋に付着し易いが、吸引風がなければ集塵袋13に付着し難い傾向がある。
【0046】
振動制御手段21は、細塵の様なごみが吸引されているときは、計数手段50の計数する回数に対しての判定値をK1、紙屑のようなごみに対してK2の判定値を、K1<K2となるように設定して有することにより、細塵のような集塵袋13に付着して取れにくい質のごみが吸引されている時は、振動装置25を動作させる頻度上げて吸引性能を継続的に維持し、紙屑のような比較的付着しにくいごみの場合は、振動装置25を動作させる頻度を下げて、集塵袋13の耐久性を確保することができる。
【0047】
また、床面検出手段52の構成についても、塵埃質検出手段51と同様に図6、図7に示す構成と同様になり、判断手段55の判断が異なるのみとなる。
【0048】
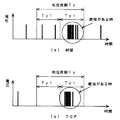
受光素子34の出力Voutは、図9に示すように、床面の種類が絨毯とフロアでは異なり、フロアでは、図9(b)に示すように、塵埃が床面に多く存在する時のみ、Voutにパルス波形が出力され、塵埃が存在しないときは、Lレベルの状態となるのに対して、絨毯では、植毛された毛や、奥深く入り込んだ塵埃等が単発的に発光素子33と受光素子34の間を通過するため、フロアと比較して、絨毯上に塵埃が存在しなくても、使用者の掃除動作に同期して図9(a)に示すような単発のパルスが現れる。
【0049】
判断手段35は、予め設定した周期Ty1の間のパルス数をカウントしており、このカウント数が所定カウント数以上の状態が、判定周期Tyの間継続したら、床面が絨毯であると判断し、そうでなければフロアであると判断する。フロア上に存在するごみは、埃や塵が主であるのに対して、絨毯上のごみは、繊維質のものが多く含まれる傾向にある。
【0050】
埃や塵は、集塵袋13に付着すると、集塵袋13の目詰まりを引き起こし、吸引風量が低下し、吸引能力の低下につながるが、繊維質のごみは、集塵袋13に付着しても、ゴミ同士の間に隙間があり、塵や埃ほど吸引風量の低下を引き起こさないため、除塵による、吸引能力の復帰が、塵や埃ほど期待できない。
【0051】
振動制御手段21は、掃除されている床面が絨毯である時には、計数手段50の計数する回数に対しての判定値をK3、フロアである時にはK4の判定値を、K3>K4となるように設定して有することにより、フロアでの細塵等が多い床面で掃除されている時は、振動装置25の動作する頻度を上げて吸引性能を継続的に維持し、絨毯での繊維質のごみの多い絨毯で掃除されている時は、振動装置25を動作させる頻度を下げて、集塵袋13の耐久性を確保することができる。
【0052】
更に、電源コンセント12が商用電源に接続され、機器に電力が供給された直後、つまり、マイクロコンピュータ22が動作開始した直後を、振動装置25が動作可能な時期として有する構成とし、計数手段50で計数される回数が1回になると、以降、振動装置25をオンさせないよう、振動制御手段21が振動装置25を制御することにより、使用者が掃除を開始するときは、吸引性能を復帰させた状態で使用できるとともに、特に、集塵袋13の耐久性を向上することができる。
【0053】
尚、本実施例において、状態検出手段として、吸引される塵埃の質を検出する塵埃質検出手段51としたが、状態検出手段を操作手段4とし、マイクロコンピュータ22が、使用者が操作して移行する特定のポジションへの移行回数を判定回数として有して除塵を行っても良い。
【0054】
(実施例4)
以下本発明の第4の実施例を、図10を参照しながら説明する。なお、従来と同一構成部品については、同一符号を付し、説明を省略する。
【0055】
図10において、62は、機器に電力を供給する電源であり、60は、電源62の電圧を検出する電圧検出手段であり、61は空気中の湿度を検出する湿度検出手段である。
【0056】
以下、上記構成による動作を説明する。
【0057】
集塵袋13に付着した塵埃の除塵においては、環境条件や使用条件により、除塵装置25を全く同じ動作をさせても除塵の効果が得られない場合もある。
【0058】
例えば、塵埃の集塵袋13への付着の強さ、すなわち、除塵を行った時の、除去し易さは、空気中の湿度が低く、塵埃が乾燥している方が除去しやすく、湿っているときは除去しにくい。
【0059】
湿度検出手段61は、吸引される空気の湿度を検出しており、振動制御手段21は湿度検出手段61が検出した湿度情報により、湿度が所定の湿度より高ければ、除塵の頻度を上げることにより、湿度が所定の湿度より高い時の除塵効果を向上することができ、湿度が所定の湿度より低ければ、除塵の頻度を下げることにより、除塵効果を得ながら、集塵袋13の耐久性を向上し、効率的に除塵動作を行うことができる。所定の湿度より高い時は、除塵の強度を上げ、低い時は強度を下げることにより、同様の効果を得ることができる。
【0060】
また、除塵装置25の電磁石24は、電源62の供給電圧が高くなれば振動板23を振動させる力が強くなり、供給電圧が低くなれば振動板23を振動させる力が弱くなる。振動板23を振動させる力が強い状態で振動装置25の動作を継続すると、振動により集塵袋13の耐久性に影響を与える可能性があり、また、振動させる力が弱いと除塵の効果を得難くなる。
【0061】
電圧検出手段60は、電源62の電圧を検出しており、振動制御手段21は、電圧検出手段60が検出した電圧が低ければ、振動装置25の動作する頻度を多くして、振動の強度が不足する部分を回数で補い、除塵効果を得られるように動作させ、電圧が高ければ頻度を低下して、過振動による集塵袋13への影響を少なくすることができる。
【0062】
また、振動制御手段21は、電圧検出手段60が検出した電圧が低ければ、振動装置25を動作させる強度を強くすることにより、電源電圧の低下による影響を無くすことができるとともに、電圧が高ければ、強度を弱くすることにより、過振動による集塵袋13への影響を無くすことができる。
【0063】
【発明の効果】
以上のように本発明によれば、機器の動作状態に合わせて、塵埃捕集手段に対して除塵を行っても、塵埃捕集手段の耐久性を確保し、且つ、高い除塵効果を得られるよう最適な塵埃捕集手段に対する除塵が行える電気掃除機を提供できる。
【図面の簡単な説明】
【図1】 本発明の第1の実施例を示す電気掃除機の制御のブロック図
【図2】 同電気掃除機の本体の概略構成図
【図3】 同電気掃除機の吸引風量動作説明図
【図4】 本発明の第2の実施例を示す電気掃除機の制御のブロック図
【図5】 本発明の第3の実施例を示す電気掃除機の制御のブロック図
【図6】 同電気掃除機の本体の概略構成図
【図7】 同電気掃除機の塵埃質検出手段の構成図
【図8】 同電気掃除機のゴミ質判定説明図
【図9】 同電気掃除機の床面判断説明図
【図10】 本発明の第4の実施例を示す電気掃除機の制御のブロック図
【図11】 従来の電気掃除機の概略構成図
【符号の説明】
2 電動送風機
4 操作手段
20 制御手段
21 振動制御手段
22 マイクロコンピュータ
23 振動板
24 電磁石
25 振動装置(除塵手段)
26 状態検出手段
27 アクチュエータ
28 間隔計時手段
29 動作計時手段
Claims (2)
- 吸引風を発生する電動送風機と、吸引された塵埃を捕集する塵埃捕集手段と、前記塵埃捕集手段に付着した塵埃を除塵する除塵手段と、前記除塵手段の動作を制御する除塵制御手段と、機器の使用状態を検出する状態検出手段とを備え、前記状態検出手段を、前記電動送風機の入力を検出する電動送風機入力検出手段で構成し、前記除塵制御手段が、前記電動送風機入力検出手段が検出した入力値に基づいて、前記除塵手段の動作間隔を可変する構成とし、前記電動送風機の入力が高く、吸引する塵埃量が多い時は、前記除塵制御手段が除塵手段を動作させる間隔を短くし、吸引能力を維持できるようにするとともに、入力が低く、吸引する塵埃が少ない時は、間隔を長くする電気掃除機。
- 吸引風を発生する電動送風機と、吸引された塵埃を捕集する塵埃捕集手段と、前記塵埃捕集手段に付着した塵埃を除塵する除塵手段と、前記除塵手段の動作を制御する除塵制御手段と、機器の使用状態を検出する状態検出手段を備え、前記状態検出手段を、吸引された塵埃の量を検出する塵埃量検出手段としての風量検出手段または圧力検出手段または温度検出手段で構成し、前記除塵制御手段が、前記塵埃量検出手段が検出した塵埃の量に基づいて、除塵手段の動作間隔を可変する構成とし、吸引風量が低くなるほどまたは真空圧が高くなるほどまたは電動送風機とその近傍の温度が高くなるほど、除塵手段を動作させる間隔を短くし、除塵の頻度を上げるようにした電気掃除機。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002320900A JP4110929B2 (ja) | 2002-11-05 | 2002-11-05 | 電気掃除機 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002320900A JP4110929B2 (ja) | 2002-11-05 | 2002-11-05 | 電気掃除機 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004154212A JP2004154212A (ja) | 2004-06-03 |
| JP4110929B2 true JP4110929B2 (ja) | 2008-07-02 |
Family
ID=32801610
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002320900A Expired - Fee Related JP4110929B2 (ja) | 2002-11-05 | 2002-11-05 | 電気掃除機 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4110929B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN100435559C (zh) * | 2005-02-01 | 2008-11-19 | 株式会社日立制作所 | 摄像装置 |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4736644B2 (ja) * | 2005-09-06 | 2011-07-27 | パナソニック株式会社 | 電気掃除機 |
| JP4876986B2 (ja) * | 2007-03-12 | 2012-02-15 | パナソニック株式会社 | 電気掃除機 |
| JP5185551B2 (ja) * | 2007-03-19 | 2013-04-17 | 日立工機株式会社 | 集塵機 |
| JP5040454B2 (ja) * | 2007-06-07 | 2012-10-03 | パナソニック株式会社 | 電気掃除機 |
| JP4930604B2 (ja) * | 2010-01-06 | 2012-05-16 | パナソニック株式会社 | 充電式電気掃除機 |
| JP6196574B2 (ja) * | 2014-03-28 | 2017-09-13 | 三菱日立パワーシステムズ株式会社 | フィルタ監視装置、吸気ダクト及び圧縮空気供給装置 |
| AU2019257931A1 (en) * | 2018-04-27 | 2020-12-17 | Synergetics Pty Ltd | Ventilation and particulate matter removal system |
| CN113729556A (zh) * | 2020-05-29 | 2021-12-03 | 天佑电器(苏州)有限公司 | 清洁吸尘设备的过滤器的方法及吸尘设备 |
-
2002
- 2002-11-05 JP JP2002320900A patent/JP4110929B2/ja not_active Expired - Fee Related
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN100435559C (zh) * | 2005-02-01 | 2008-11-19 | 株式会社日立制作所 | 摄像装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2004154212A (ja) | 2004-06-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10874969B2 (en) | Method for cleaning a filter of a vacuum cleaning apparatus and vacuum cleaning apparatus therefor | |
| JP4110929B2 (ja) | 電気掃除機 | |
| CN101945607A (zh) | 用于吸尘器的抽吸功率自动调节的装置 | |
| JP2008301878A (ja) | 電気掃除機 | |
| CN108968804A (zh) | 自清洁真空吸尘器 | |
| JP2019098006A (ja) | 電気掃除機 | |
| JP5777545B2 (ja) | 電気掃除機 | |
| JP2007054548A (ja) | 電気掃除機 | |
| JP2006325820A (ja) | 電気掃除機 | |
| JP5799195B2 (ja) | 電気掃除機 | |
| JP5040454B2 (ja) | 電気掃除機 | |
| JP2010284353A (ja) | 電気掃除機 | |
| JP2004129778A (ja) | 電気掃除機 | |
| KR100748170B1 (ko) | 공기청정기 및 그 제어방법 | |
| JP4281322B2 (ja) | 電気掃除機 | |
| JP2009056029A (ja) | サイクロン集塵装置,電気掃除機 | |
| JP2004215898A (ja) | 電気掃除機 | |
| JP5333000B2 (ja) | 電気掃除機 | |
| JP2021003348A (ja) | 電気掃除機 | |
| CN220141549U (zh) | 用于吸尘装置的过滤器清洁系统以及吸尘装置 | |
| JP2007319580A (ja) | 電気掃除機 | |
| JP2005058641A (ja) | 電気掃除機 | |
| JP2004201919A (ja) | 電気掃除機 | |
| JP2008104686A (ja) | 電気掃除機 | |
| JP2005279504A (ja) | フィルターユニット |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050606 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20050713 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20070824 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070918 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20071105 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20080318 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20080331 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110418 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120418 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130418 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130418 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140418 Year of fee payment: 6 |
|
| LAPS | Cancellation because of no payment of annual fees |