JP4072350B2 - モータ制御装置 - Google Patents
モータ制御装置 Download PDFInfo
- Publication number
- JP4072350B2 JP4072350B2 JP2002026677A JP2002026677A JP4072350B2 JP 4072350 B2 JP4072350 B2 JP 4072350B2 JP 2002026677 A JP2002026677 A JP 2002026677A JP 2002026677 A JP2002026677 A JP 2002026677A JP 4072350 B2 JP4072350 B2 JP 4072350B2
- Authority
- JP
- Japan
- Prior art keywords
- control
- value
- command value
- calculation unit
- target value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images





Description
【発明の属する技術分野】
本発明は、制御対象を指令値の時間的変化に追従させる制御装置(例えば、工作機械のようなNC装置)で、特に外乱応答と追従性を良くするモータ制御装置に関する。
【0002】
【従来の技術】
従来、図5に示すような一般的なPID制御で、外乱応答を重視してその応答を良くするようにPIDパラメータの設定を行った場合、追従制御の変曲点でのオーバーシュートが大きくなってしまう。逆に指令値rに対する追従を重視してその応答を良くするようにPIDパラメータの設定を行った場合、外乱応答が悪くなってしまう。
【0003】
一般的なPID制御の弱点を改善する制御方式として、外乱応答を良くするPIDパラメータとオーバーシュートを抑制するPIDパラメータの両方をもって制御する2自由度PID制御方式がある。2自由度PID制御方式の中でも、目標値フィルタ型2自由度PID制御は、既存の一般的なPID制御に比較的容易に組み込み可能であるという特徴があり、実現し易い方式である。
【0004】
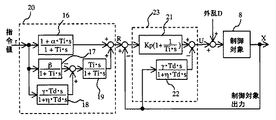
図6に従来からある目標値フィルタ型2自由度PID制御の構造例を示す(特開平6−304726号公報参照)。同図に示す制御装置において、操作量Uを制御対象8に出力するPID演算部23の前段に目標値フィルタ20が設けられている。目標値フィルタ20は、指令値rに追従させるのに最適な状態になるように制御定数が設定されている。指令値rが入力されると、この目標値フィルタ20によって補償されたリファレンスRが出力される。
【0005】
PID演算部23は、外乱応答に最適な状態になるように制御定数が設定されている。PID演算部23には、リファレンスRと制御対象8の出力の差である偏差が入力され、操作量Uが出力される。
【0006】
制御対象8には、PID演算部23からの操作量Uが入力されるとともに、外乱Dが入力される。目標値フィルタ20としては、種々の演算方式が提案されているが、目標値フィルタ20の演算式F(s)の例を以下の(1)に示す。
【0007】

【0008】
指令値rは、先ず、比例相当要素16と積分相当要素17と微分相当要素18に入力され、積分相当要素17及び微分相当要素18からの出力が微積共通項相当要素19に入力される。そして、比例相当要素16と微積共通項相当要素19との出力が加算され、リファレンスRとして出力される。
【0009】
一方、制御対象8からの出力がPID演算部の微分要素22に入力されている。又、制御対象8からの出力と目標値フィルタ20からリファレンスRとの差が比例積分要素21に入力されている。
【0010】
そして、比例積分要素21と微分要素22との差が操作量Uとして制御対象8に出力される。このように構成され動作する従来の目標値フィルタ型2自由度PID制御方式のパラメータとしては、PID演算部23に或るPIDパラメータ及び目標値フィルタ20の比例相当要素16と積分相当要素17と微分相当要素18とにそれぞれ設けられた目標値パラメータα,β,γがある。目標値フィルタ型2自由度PID制御方式では、PIDパラメータと目標値パラメータを調整して、プロセスに対して最適の応答を求めるようにしている。
【0011】
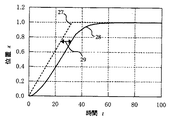
目標値フィルタ型2自由度PID制御は、制御対象を或る一定値に瞬間的に位置決めするステップ応答の場合には有効な制御手法である。図7に従来からある目標値フィルタ型2自由度PID制御のステップ応答例を示す。ステップ状の指令値を24(破線)のように入力したとき、図5に示すような一般的なPID制御のステップ応答は25(点線)のようになり、オーバーシュートが大きく、位置決め時間も長い。目標値フィルタ型2自由度PID制御のステップ応答は26(実線)のようになり、オーバーシュートが小さく、位置決め時間も短い。通常、目標値フィルタ型2自由度PID制御は、外乱をPID制御部で抑制し、目標値フィルタで追従性を上げることができるため、外乱応答及び追従性に優れたサーボ系の制御システムを構成することができる。
【0012】
しかし、上記に述べた目標値フィルタ型2自由度PID制御は指令値rが或る勾配をもって時間と共に変化するランプ応答の場合には必ずしも有効とは言えない。
【0013】
図8に従来からある目標値フィルタ型2自由度PID制御のランプ応答例を示す。ランプ状の指令値rを27(破線)のように入力したとき、目標値フィルタ型2自由度PID制御のランプ応答は28(実線)のようになり、或る一定の勾配をもって立ち上がるランプ区間では指令値より29のような時間遅れが発生する。
【0014】
目標値フィルタ型2自由度PID制御のこのような定常オフセットを持つ弱点を改善する制御装置として、PV切換式2自由度PID制御装置がある(特開平7−104807号公報参照)。図9にPV切換式2自由度PID制御装置の構造例を示す。目標値フィルタ型2自由度PID制御に対しソフトウエア手段としての切換部33と、この切換部33によって駆動される切換スイッチ30が新設されている。そして、切換部33は切換点算出部32並びにこの切換点算出部32の出力と制御対象出力を比較して切換スイッチ30を切換える比較器31を備えている。
【0015】
PV切換式2自由度PID制御装置は、一定の勾配を持つランプ区間は一般的なPID制御を行い、ランプ区間から勾配が零となるソーク区間に切換え時点より定常オフセット時間分だけ手前の時点を越えると目標値フィルタ型2自由度PID制御を行うように切換スイッチ30を切換える。
【0016】
PV切換式2自由度PID制御装置を利用することで、ランプ区間での制御遅れを取り除き、且つ、オーバーシュートが少なく、外乱に強い制御が可能となる。
【0017】
【発明が解決しようとする課題】
しかしながら、上記に述べたPV切換式2自由度PID制御装置であっても、指令値rが任意の勾配で時間と共に変化する曲線応答の場合には有効とは言えない。図8に示すランプ区間とソーク区間の切換え時点のようにスイッチの切換点がはっきりとしない曲線状の指令値rを入力したとき、スイッチの切換えが不可能である。
【0018】
更に、曲線応答の場合、常に追従エラー(オーバーシュート)が起き易い状態になるため、常に目標値フィルタをONにしなければならず、制御遅れを取り除くことができない。時間と共に変化する曲線を指令値として入力する加工機には、従来の目標値フィルタ型2自由度PID制御、PV切換式自由度PID制御は適用できず、制御遅れが原因で形状精度が悪化する。
【0019】
本発明は上記問題に鑑みてなされたもので、その目的とする処は、目標値フィルタによる定常オフセット時間の制御遅れを防いで良好な制御特性を得ることができるモータ制御装置を提供することにある。
【0020】
【課題を解決するための手段】
上記目的を達成するため、本発明は、PIとD(P:比例、I:積分、D:微分)調整演算子動作を分離し、制御対象からの制御量とこの制御量の指令値から補償演算を行って得られる実効指令値との偏差が零となるようにPI・D調整演算を行い、得られる調整信号を操作信号として前記制御対象に印加するモータ制御装置において、
制御量の指令値を補償する目標値フィルタと、PI調整演算部とD調整演算部に対する実効指令値をそれぞれ得る補償演算部とを有し、前記目標値フィルタから出力された値を前記PI調整演算部に対する補償演算部に入力し、前記制御量の指令値を前記D調整演算部に対する補償演算部に入力することを特徴とする。
【0021】
【発明の実施の形態】
以下に本発明の実施の形態を添付図面に基づいて説明する。
【0022】
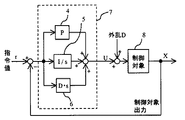
図1に本発明に基づくモータ制御のブロック図を示す。
【0023】
指令値rに追従させたい制御対象8と、制御対象8の出力をフィードバック制御するPID演算部7(比例成分4、積分成分5、微分成分6から成る)と、指令値を補償して追従性を向上させるための目標値フィルタ3によって構成されている。
【0024】
一般的に制御対象は指令値rの速度変化が激しい部分において、追従エラー(オーバーシュート)が起き易くなる。そこで、追従エラーが起きないように目標値フィルタ3で指令値rを補償する。指令値rの速度変化が激しい部分とは加速度が大きな部分であるので、二階微分器1で指令値の加速度を求める。1次フィルタ2のKによって補償する大きさを決定し、Tによって補償量の減衰時間を決定する。
【0025】
二階微分器1と1次フィルタ2による補償量を指令値rに加算して制御対象の出力との偏差を計算しPID制御の比例(P)成分4及び積分(I)成分5に入力する。二階微分器1と1次フィルタ2による補償量は指令値rに対して並列に設けられているので、1次フィルタ2のKを零とすることで、図5に示すような一般的なPID制御と同じ構成にすることもできる。
【0026】
ステップ状や時間と共に鋭角に変化する指令値rを二階微分器1に通すと補償量には鋭いパルス状の信号が含まれる。補償量に含まれるパルス状の信号に合わせて制御対象を動かすことは制御対象8を振動させることになるので望ましくない。そこで、PID制御の微分(D)成分6には補償していない指令値rと制御対象8の出力の偏差を、微分(D)成分6にそのまま直接入力している。こうすることによって、目標値フィルタ3によってパルス状に補償されたとしても制御対象8は過度に反応することなく指令値rに追従することができる。
【0027】
本発明の目標値フィルタは指令値rの速度変化が激しい部分にのみ作用するので、指令値rがある勾配のランプ区間や曲線区間を含んでいても、追従特性に制御遅れは発生しない。
【0028】
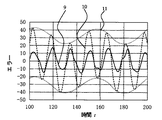
例えば、NC装置において、スピンドル軸を3800rpmで回転させ、周波数20Hzの正弦波状の曲線加工する場合を考える。NC装置は1軸のスピンドル軸と多くの位置決め制御軸から構成される。スピンドル軸が3800rpm回転すると、その影響により位置決め軸には63.3Hz(3800rpm)の周期外乱が発生する。
【0029】
図2に追従性と外乱応答における本発明の効果の例を示す。このような加工を一般的なPID制御を用いて行うと、位置決め追従偏差は10(破線)のようになり、外乱の影響により63.3Hz(3800rpm)の周期で大きな加工エラーが発生する。又、20Hzの指令値の影響による加工エラーも11(点線)のように発生する。
【0030】
本発明の制御手法を用いてこのような加工を行うと、位置決め追従偏差は9(実線)のようになり、外乱の影響による63.3Hz(3800rpm)の加工エラーと、20Hzの指令値の影響による加工エラーは共に従来の一般的なPID制御の約半分にすることができる。
【0031】
図5に示すような一般的なPID制御はそれだけで追従性と外乱応答性を上げなければならないが、本発明の制御手法は図6に示すような従来の目標値フィルタ型2自由度PID制御のように、外乱応答性はPID制御によって上げ、追従性は目標値フィルタによって上げることができる。
【0032】
図3にPID設定値による外乱抑制の効果の例を示す。例えば一般的なPID制御における外乱抑制特性は12(破線)のようになり、特に35Hz付近の周期外乱に弱い場合を考える。本発明の制御手法適用時では従来の目標値フィルタ型2自由度PID制御のように外乱応答重視のPIDパラメータを設定することができる。そのときの外乱抑制特性は13(実線)のようになり、従来のPIDでは弱い35Hz付近の周期外乱を抑制することができる。この場合、10Hz〜113Hzの周期外乱においては抑制することができるが、その他の周波数に関しては従来のPID設定値用いた外乱抑制特性12(破線)の方が良い。
【0033】
本発明の目標値フィルタは後段のPID制御系と完全に独立であるため、周期外乱の周波数によってPID設定値を切り替えて使用することが可能である。例えば、周期外乱の周波数によって外乱応答重視のPIDパラメータ設定に切り替えた後、目標値フィルタのパラメータK,Tで追従誤差が小さくなるように設定することができる。図4に追従性における本発明の効果の例を示す。例えば、正弦波状の指令値を入力し、制御対象を追従させたとき、一般的なPID制御を用いた時の追従エラーは高周波になるに従って14(破線)のように非常に大きく増加する。
【0034】
しかし、本発明の制御手法を適用すると、追従エラーは15(実線)のようになり、特に高周波追従において一般的なPID制御の時と比べて非常に小さくすることができる。本発明の制御手法を用いることで、大幅に追従エラーを小さくすることができ、高周波の正弦波追従における耐久性も大幅に向上させることができる。
【0035】
本発明の目標値フィルタおよびPI・D調整演算器はソフトウエアで構成し,CPUでも演算処理可能である。本発明の目標値フィルタ3及びPI・D調整演算器7による操作量Uの演算式の例を以下の式(2)に示す。
【0036】
U=[{1+s2 ・K/(1/T+s)}−X]・(P+I/s)
+(r−X)・D・s …(2)
式(2)をCPUで演算した操作量Uを制御対象に入力することで、上記実施の形態と同様の効果が得られる。
【0037】
【発明の効果】
以上の説明で明らかなように、本発明によれば、PIとD(P:比例、I:積分、D:微分)調整演算子動作を分離し、制御対象からの制御量とこの制御量の指令値から補償演算を行って得られる実効指令値との偏差が零となるようにPI・D調整演算を行い、得られる調整信号を操作信号として前記制御対象に印加するモータ制御装置において、前記制御量の指令値からPI調整演算部とD調整演算部に対する実効指令値をそれぞれ得る補償演算部を設け、前記PI調整演算部に対する補償演算部は制御量の指令値に、並列に指令値の2階微分器+1次ローパスフィルタを設け、制御量の指令値に2階微分器+1次ローパスフィルタの出力を加算する構成とし、前記D調整演算部に対する補償演算部は制御量の指令値を使用するように構成したため、目標値フィルタによる定常オフセット時間の制御遅れを防いで良好な制御特性を得ることができる。
【図面の簡単な説明】
【図1】本発明に基づくモータ制御のブロック図である。
【図2】追従性と外乱応答における本発明の効果の例を示す図である。
【図3】PID設定値による外乱抑制の効果の例を示す図である。
【図4】追従性における本発明の効果の例を示す図である。
【図5】一般的なPID制御の構造を示す図である。
【図6】従来からある目標値フィルタ型2自由度PID制御の構造例を示す図である。
【図7】従来からある目標値フィルタ型2自由度PID制御のステップ応答例を示す図である。
【図8】従来からある目標値フィルタ型2自由度PID制御のランプ応答例を示す図である。
【図9】PV切換式2自由度PID制御装置の構造例を示す図である。
【符号の説明】
1 二階微分器
2 1次フィルタ
3 目標値フィルタ
4 PID制御の比例成分
5 PID制御の積分成分
6 PID制御の微分成分
7 PID演算部
8 制御対象
9 位置決め追従偏差
10 一般的なPID制御を適用したときの位置決め追従偏差
11 指令値の影響による加工エラー
12 一般的なPID制御における外乱抑制特性
13 PIDパラメータを設定したときの外乱抑制特性
14 一般的なPID制御を用いた時の追従エラー
15 本発明の制御手法を適用したときの追従エラー
16 比例相当要素
17 積分相当要素
18 微分相当要素
19 微積共通項相当要素
Claims (3)
- PIとD(P:比例、I:積分、D:微分)調整演算子動作を分離し、制御対象からの制御量とこの制御量の指令値から補償演算を行って得られる実効指令値との偏差が零となるようにPI・D調整演算を行い、得られる調整信号を操作信号として前記制御対象に印加するモータ制御装置において、
制御量の指令値を補償する目標値フィルタと、PI調整演算部とD調整演算部に対する実効指令値をそれぞれ得る補償演算部とを有し、前記目標値フィルタから出力された値を前記PI調整演算部に対する補償演算部に入力し、前記制御量の指令値を前記D調整演算部に対する補償演算部に入力することを特徴とするモータ制御装置。 - 前記目標値フィルタは、二階微分器および一次ローパスフィルタを前記制御量の指令値と並列に設け、二階微分器および一次ローパスフィルタによる補償量を前記制御量の指令値に加算した値を出力することを特徴とする請求項1に記載のモータ制御装置。
- 前記2階微分器および1次ローパスフィルタによる補償量を零とすることで、目標値フィルタの出力を制御量の指令値とすることを特徴とする請求項2に記載のモータ制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002026677A JP4072350B2 (ja) | 2002-02-04 | 2002-02-04 | モータ制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002026677A JP4072350B2 (ja) | 2002-02-04 | 2002-02-04 | モータ制御装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2003235280A JP2003235280A (ja) | 2003-08-22 |
| JP2003235280A5 JP2003235280A5 (ja) | 2005-08-18 |
| JP4072350B2 true JP4072350B2 (ja) | 2008-04-09 |
Family
ID=27773353
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002026677A Expired - Fee Related JP4072350B2 (ja) | 2002-02-04 | 2002-02-04 | モータ制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4072350B2 (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008167630A (ja) * | 2007-01-05 | 2008-07-17 | Fuji Electric Fa Components & Systems Co Ltd | 電力変換器の制御装置 |
| JP4672001B2 (ja) * | 2007-12-26 | 2011-04-20 | 株式会社鷺宮製作所 | 過熱度の制御装置 |
| JP5915349B2 (ja) * | 2012-04-18 | 2016-05-11 | 日産自動車株式会社 | 電動車両の制振制御装置 |
| JP2017530660A (ja) * | 2014-08-20 | 2017-10-12 | ライト ステイト ユニバーシティWright State University | 分数スケーリングデジタル信号処理 |
| JP6296170B2 (ja) * | 2014-11-27 | 2018-03-20 | 理化工業株式会社 | 温度制御装置及び温度制御方法 |
| JP7338960B2 (ja) * | 2018-09-27 | 2023-09-05 | ニデックインスツルメンツ株式会社 | サーボ制御装置及びサーボ制御方法 |
-
2002
- 2002-02-04 JP JP2002026677A patent/JP4072350B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2003235280A (ja) | 2003-08-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US6859007B2 (en) | Servo motor drive control device | |
| JP3805309B2 (ja) | サーボモータ駆動制御装置 | |
| JP4283214B2 (ja) | 機械先端点の制御装置 | |
| JP4813616B1 (ja) | 円弧動作時の速度制御機能を有する工作機械の数値制御装置 | |
| JP3545006B2 (ja) | 2自由度制御装置及び電動機のサーボ制御装置 | |
| JP3169838B2 (ja) | サーボモータの制御方法 | |
| US10310489B2 (en) | Servo controller | |
| US20090251093A1 (en) | Motor control apparatus | |
| US20170277150A1 (en) | Motor controller having function of reducing vibration | |
| JPH1124754A (ja) | サーボ調整方法およびその装置 | |
| US8903518B2 (en) | Motor control apparatus equipped with dead-zone processing unit | |
| US5936366A (en) | Servo adjustment method and apparatus thereof | |
| US20070007927A1 (en) | Position controller and controlling method therefor | |
| JP4072350B2 (ja) | モータ制御装置 | |
| JP2008310651A (ja) | 二自由度制御装置とその制御方法 | |
| JP7132024B2 (ja) | モータ制御装置 | |
| JP2005071034A (ja) | サーボ制御装置 | |
| JP2658976B2 (ja) | モータの速度制御方式 | |
| JP3871030B2 (ja) | サーボ制御方法 | |
| CN111546329A (zh) | 一种多关节机器人伺服增益一致性控制方法 | |
| JPWO2002082194A1 (ja) | サーボ制御装置 | |
| JP3091625B2 (ja) | 学習型数値制御装置 | |
| JP4687418B2 (ja) | モータ制御装置 | |
| JP7156184B2 (ja) | パラメータ調整方法 | |
| JP4362762B2 (ja) | サーボ制御装置およびその調整方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20041222 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050204 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050204 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20070605 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20080115 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20080121 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110125 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120125 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130125 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140125 Year of fee payment: 6 |
|
| LAPS | Cancellation because of no payment of annual fees |