JP4063149B2 - 車両角速度検出装置 - Google Patents
車両角速度検出装置 Download PDFInfo
- Publication number
- JP4063149B2 JP4063149B2 JP2003150973A JP2003150973A JP4063149B2 JP 4063149 B2 JP4063149 B2 JP 4063149B2 JP 2003150973 A JP2003150973 A JP 2003150973A JP 2003150973 A JP2003150973 A JP 2003150973A JP 4063149 B2 JP4063149 B2 JP 4063149B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- calculated
- angular velocity
- speed
- inclination angle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000001514 detection method Methods 0.000 title claims description 46
- 230000001133 acceleration Effects 0.000 claims description 65
- 238000012937 correction Methods 0.000 claims description 21
- 230000035945 sensitivity Effects 0.000 claims description 14
- NCGICGYLBXGBGN-UHFFFAOYSA-N 3-morpholin-4-yl-1-oxa-3-azonia-2-azanidacyclopent-3-en-5-imine;hydrochloride Chemical compound Cl.[N-]1OC(=N)C=[N+]1N1CCOCC1 NCGICGYLBXGBGN-UHFFFAOYSA-N 0.000 claims description 3
- 230000005484 gravity Effects 0.000 claims description 2
- 238000000034 method Methods 0.000 description 20
- 238000012545 processing Methods 0.000 description 16
- 238000009434 installation Methods 0.000 description 9
- 238000010586 diagram Methods 0.000 description 8
- 239000004973 liquid crystal related substance Substances 0.000 description 2
- 238000013459 approach Methods 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 238000012790 confirmation Methods 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 230000004069 differentiation Effects 0.000 description 1
- 238000010790 dilution Methods 0.000 description 1
- 239000012895 dilution Substances 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 238000010295 mobile communication Methods 0.000 description 1
- 230000003252 repetitive effect Effects 0.000 description 1
- 230000005236 sound signal Effects 0.000 description 1
Images













Landscapes
- Gyroscopes (AREA)
- Navigation (AREA)
Description
【発明の属する技術分野】
本発明は、加速度センサに対して所定の角度で移動体に固定され、検出軸の周りの当該移動体の旋回の角速度を検出するジャイロスコープの一時的な傾斜の角度を、当該加速度センサの出力と当該移動体の移動加速度とに基づいて検出する移動体角速度検出装置に関するものである。
【0002】
【従来の技術】
従来より、車両の走行距離および進行方向に基づいて車両の現在位置を特定する技術が、カーナビゲーション装置等において用いられている。このような技術を用いる際、車両の相対方位変化を検出する手段として、ジャイロスコープが使用されている。ジャイロスコープは検出軸周りの回転角速度に比例した出力(主として電圧値)を発生するように構成されている。このジャイロスコープを用いることにより、ジャイロスコープの出力から角速度に換算するための比例定数(すなわちゲイン)により角速度を求め、それを積算することにより車両の相対方位変化量を求めることができる。ただし、ゲインにはジャイロスコープの個体差によるばらつきがあるため、このばらつきによるゲイン誤差εを補正するためのゲイン補正係数を算出しなければならない。
【0003】
また、ジャイロスコープの設置条件によっては車両の旋回軸とジャイロスコープの検出軸の方向が一致しない場合がある。このような場合、ジャイロスコープの見かけ上のゲインは変動してしまい、車両の角速度とジャイロスコープが検出する角速度に差異が生じてしまう。具体的にはジャイロスコープの検出軸が車両の旋回軸と角度αだけ傾いている場合には、ジャイロスコープの出力から導かれる角速度は実際の値のcosα倍となり、みかけ上のゲインが変動する。
【0004】
さらに、走行路面の状況による車両自体の傾きによっても同様の理由によりジャイロスコープの見かけ上のゲインが変動してしまう。そのため実際にはジャイロスコープの設置角度と車両の傾斜の複合(つまりジャイロスコープ自身の絶対傾斜角度)により見かけ上のゲインは変動する。
【0005】
図12、図13、図14に、このような車両の実際の旋回による旋回軸の回りの角速度と、ジャイロから出力される値との関係を説明するための図を示す。図12〜図14においては、車両2には、ナビECUが設置されている。このナビECUには、上記した車両の相対方位変化を検出する手段としてのジャイロスコープ13が、ナビECUに対して検出軸が垂直に固定された状態で搭載されている。また、このナビECUは、車両2の水平面に対して角度αだけ車両前方に傾いている。従って、ジャイロスコープ13の検出軸は、車両の垂直上方に対して角度αだけ車両前方に傾いている。なお、車両の水平面とは、車両に固定された面であり、車両が水平な路面にあるときは、その水平な路面と平行な面である。
【0006】
図12においては、車両2は、水平な道路3を走行している。この場合、ジャイロスコープ13の検出軸方向の、鉛直方向に対する角度はα(<0)に等しい。なお以降本明細書では、図中反時計回り方向の角度を正の角度として表現する。従って、値yawを、車両の真の旋回角速度を定格のゲインで除算したものであるとすると、ジャイロスコープ13の出力値は、yaw×ε×cosαとなる。なお、本明細書では、この定格のゲインが1となる単位系を採用するものとする。
【0007】
また、図13においては、車両2は、傾斜角θの上り坂4を走行している。この場合、ジャイロスコープ13の検出軸方向の、鉛直方向に対する角度はθ+α(=θ−|α|)に等しい。従って、ジャイロスコープ13の出力値は、yaw×ε×cos(θ−α)となる。
【0008】
また、図14においては、車両2は、傾斜角θ(<0)の下り坂5を走行している。この場合、ジャイロスコープ13の検出軸方向の、鉛直方向に対する角度はα+θ(=−|α|+|θ|)に等しい。従って、ジャイロスコープ13の出力値は、yaw×ε×cos(α+θ)となる。
【0009】
このように、車両の相対方位変化量を正しく算出するためには、ジャイロスコープ自身のゲイン誤差ε、ジャイロスコープ設置角α、および車両の傾斜θによる、見かけ上のゲインの変動ε×cos(α+θ)を補正する必要がある。これらの補正方法としては、GPS(Global Positioning System)による補正(例えばカルマンフィルタ)が一般的である。これは、ジャイロスコープの出力から得られた角速度を積算して算出した相対方位変化量と、GPSから得られる絶対方位の差分より算出される相対方位変化量とを比較し、ゲイン補正係数を求める方法である(例えば、特許文献1参照)。
【0010】
ところがこの方法は、補正のための処理を長時間繰り返し実行することによって実現されるため、定常的な誤差であるゲイン誤差εおよびジャイロスコープ設置角αの組み合わせの誤差εcosαは補正できるが、一時的な誤差である車両の傾斜θの変化によって生ずる誤差の補正が困難である。したがってこのような従来の方法にて補正を実施した場合、車両の傾斜による影響は補正されず、傾斜面を走行する時に相対方位誤差が発生してしまう問題があった。この時の誤差の大きさはジャイロスコープの設置角αおよび車両の傾斜角θが大きいほど大きくなる。
【0011】
上記のような問題を解決するためには、ジャイロスコープの設置角および車両の傾斜角度を算出し、GPSによる補正にて補正しきれない車両の傾斜θの影響を除去する必要がある。
【0012】
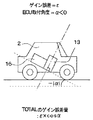
車両の傾斜θを検出する手段としては、車両の加速度および重力加速度を検出できる加速度センサ、および車速パルス信号の使用が一般的である(例えば、特許文献1参照)。加速度センサを車両進行方向と車両垂直方向(すなわち車両旋回軸方向)を含む平面内に対して感度が大きくなるように設置すると、加速度センサは車両の加速度と重力加速度の加速度センサの感度方向成分との合成を検出して出力する。図15に、車両進行方向の加速度成分を検出するように設置された加速度センサ16を搭載した車両2が、角度θの上り坂4を走行している状態を示す。この図に示すように、加速度センサの車両水平面に対する設置角が0°で、車両が傾いている場合は、重力加速度の車両進行方向成分がg・sinθとなり、加速度センサ16が検出する加速度は、車両の進行方向への速度の時間微分をaとすると、a+g・sinθとなる。ここで、gは重力加速度の大きさとする。
【0013】
この加速度センサの出力から、車速パルス信号を基に得られた車速の時間微分を除去することにより、重力加速度の進行方向成分の大きさのみを抽出でき、車両の傾斜角度の変化を算出することができる。
【0014】
【特許文献1】
特開2000−055678号公報
【0015】
【発明が解決しようとしている課題】
ところがこの方法では、加速度センサの設置角度の車両水平面から上下へのずれにより、算出される傾斜角度が変化してしまうことと、加速度センサにおいても同じ加速度に対する出力値が個体間でばらつきがあることから、車両の相対的な傾斜の値を算出することはできても、加速度センサの設置角や車両の絶対的な傾斜角度を算出することができない。
【0016】
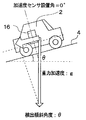
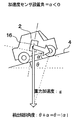
図16、図17に、車両2への加速度センサ16の取り付け角が図15に示した場合と異なるものを示す。図16においては、車両2は図15と同様に傾斜角θの上り坂4を走行しているが、図16においては加速度センサの感度方向は車両前方に対して角度α(>0)を成し、図17においては角度α(<0)を成している。この場合、加速度センサ16の感度方向は水平方向に対して角度θ+|α|、またはθ−|α|を成す。従って、重力加速度の感度方向の成分はg・sin(α+θ)となる。この場合、加速度センサの出力とパルス信号から得られるのは、α+θの値のみである。
【0017】
また、絶対的な傾斜の値θを計算することができたとしても、上記したGPSによる補正にて得られる補正値εcosαおよびθからは、ゲインの変動ε・cos(α+θ)の値を直接導くことはできない。
【0018】
上記した特許文献1においては、これらの問題に対して、加速度センサ16の車両への取り付け角度を予め測定し、またジャイロスコープの検出軸と加速度センサの感度方向が垂直になるように(すなわちジャイロスコープと加速度センサが所定の角度を成すように)一体に形成するようにして対処している。
【0019】
本発明は上記点に鑑み、加速度センサに対して所定の角度で移動体に固定され、検出軸の周りの当該移動体の旋回の角速度を検出するジャイロスコープの一時的な傾斜の角度を、前記加速度センサの出力と前記移動体の移動加速度とに基づいて検出する移動体角速度検出装置において、前記加速度センサの前記移動体に対する絶対傾斜角を走行しながら算出することができるようにすることを目的とする。
【0020】
【課題を解決するための手段】
上記目的を達成するための請求項1に記載の発明は、車両に取り付けられた加速度センサの出力Gと、前記車両の車速パルス信号に基づく車速vの時間微分である移動加速度aと、に基づいて、水平面に対する前記車両の車両前方の傾斜角θを算出する第1算出手段(220)と、他律航法によって前記車両の鉛直方向への移動速度Vを特定する鉛直速度特定手段(15)と、前記出力Gと、前記移動加速度aと、前記鉛直速度特定手段が特定した前記鉛直方向への移動速度Vと、前記車速パルス信号に基づく前記車速vと、に基づいて、前記加速度センサの前記車両に対する車両前方の傾斜角αを、式
α=sin−1{(G−a−g・V/v)/g}
によって算出する第2算出手段(230、240)と、前記加速度センサの感度方向に対して検出軸が直交するように前記車両に固定され、当該検出軸の周りの前記車両の旋回の角速度を出力するジャイロスコープの出力gyro_outの補正係数gainを算出し、当該補正係数gainの算出において、当該ジャイロスコープの出力から得られた角速度を積算して算出した相対方位変化量と、GPS( Global Positioning System )から得られる方位の差分より算出される相対方位変化量と、の比較により、当該補正係数gainが1/(εcosα)(ただし、値εは前記加速度センサの定常的なゲイン誤差)となるような算出を行い、さらに、算出された当該補正係数gain、前記第1算出手段が算出した前記傾斜角θ、および、前記第2算出手段が算出した前記傾斜角αに基づいて、式
gyro_out×gain×cosα/cos(α+θ)
の値を、車両の角速度yawとする補正手段(210、250)と、を備え、前記第1算出手段は、前記傾斜角θを、さらに重力加速度g、および、前記第2算出手段によって算出された傾斜角αとg_offset=g・sinαの関係にある値g_offsetに基づいて、
θ=sin−1{(G−a−g_offset)/g}
によって算出することを特徴とする車両角速度検出装置である。
【0021】
これによって、車両検出装置は、他律航法によって特定した鉛直方向への移動速度Vを用いることによって、水平面に対する車両の傾斜角θおよび加速度センサの車両に対する傾斜角αを算出することができる。
【0023】
また、請求項2に記載の発明は、請求項1に記載の車両角速度検出装置において、前記第2算出手段は、前記鉛直速度特定手段が特定した前記車両の鉛直方向への前記移動速度Vに基づいて、前記車両が水平走行していることを判定する水平判定手段(130、140)と、前記水平判定手段の判定に基づいて、車両の傾斜角がゼロであると仮定して前記加速度センサの前記車両に対する前記傾斜角αを算出するゼロ仮定手段(150)と、を備えたことを特徴とする。
【0024】
また、請求項3に記載の発明は、請求項1または2に記載の車両角速度検出装置において、前記鉛直速度特定手段は、前記車両の緯度、経度、高度の情報およびこれら情報の検出の誤差に関する情報を出力するGPS受信機であり、前記第2算出手段は、前記鉛直速度特定手段による位置特定の精度が良好であるか否かを、前記鉛直速度特定手段が出力した前記誤差に関する情報に基づいて判定し、良好である場合に、前記傾斜角αを算出することを特徴とする。
【0025】
なお、上記各手段の括弧内の符号は、後述する実施形態に記載の具体的手段との対応関係を示すものである。
【0026】
【発明の実施の形態】
(第1実施形態)
図1に、本発明の第1実施形態に係る移動体角速度検出装置としてのカーナビゲーション装置1の構成を示す。カーナビゲーション装置1は、位置検出器11、操作スイッチ群17、外部メモリ制御装置19、表示装置20、リモコンセンサ21およびこれらに接続された制御回路18を備えている。
【0027】
表示装置20は、液晶ディスプレイ等の表示面およびマイクを有し、制御回路18から映像信号の入力があると液晶ディスプレイ等の表示面に当該映像を表示し、また制御回路18から音声信号の入力があるとスピーカに当該音声を出力させる。
【0028】
操作スイッチ群17は、表示装置20の表示面の周囲に設けられた複数の押しボタン、当該表示面に重ねて設けられたタッチパネル等の入力装置から成り、ユーザによる押しボタンの押下、タッチパネルのタッチおよびトレースに基づいた信号を制御回路18に出力する。
【0029】
リモコンセンサ21は、ユーザの操作に基づいて赤外線等による無線信号を送信するリモコン22から受信した信号を制御回路18に出力する。
【0030】
位置検出器11は、いずれも周知の地磁気センサ12、ジャイロスコープ13、車速センサ14、GPS(Global Positioning System)受信機15、および加速度センサ(以下Gセンサと記す)16を有する、車両に固定されるナビECUであり、これらのセンサ等12〜16の検出に基づいた現在位置情報を制御回路18に出力する。これらのセンサ等12〜16は各々が性質の異なる誤差を持っているため、複数のセンサを相補的に使用するように構成されている。なお精度によっては上述した内の一部で構成されていてもよく、更に図示しないステアリングの回転センサ、各駆動輪の車輪センサ等を有していてもよい。
【0031】
ジャイロスコープ13は、所定の検出軸の周りの車両の回転角速度を検出し、その値を電気信号として制御回路18に出力する。この検出軸は、車両の進行方向および車両の垂直方向を含む平面内にあり、かつ車両の垂直方向に概ね一致している。なお、車両の垂直方向とは、正常な状態の車両が水平面上にあるときに鉛直方向と一致するような、当該車両に固定された方向である。
【0032】
車速センサ14は、車両のエンジンECUから車速パルス信号を取得して制御回路18に出力する。この車速センサ14は、車両の移動速度を検出するセンサである。
【0033】
Gセンサ16は、車両の進行方向および車両の垂直方向を含む平面内の、概ね車両の進行方向に一致する方向の加速度を検出し、その値を電気信号として制御回路18に出力する他律航法による位置特定のための装置である。以下、Gセンサ16が加速度を検出する方向をGセンサ16の感度方向と記す。
【0034】
GPS受信機15は、GPS衛星から送信される位置情報に基づいて車両の緯度、経度、高度を検出し、これら緯度、経度、高度の情報および検出の誤差に関する情報を制御回路18に出力する。検出の誤差に関する情報としては、衛星配置、DOP(Dilution Of Precision)値等がある。
【0035】
なお、ジャイロスコープ13の検出軸とGセンサ16の感度方向とは、互いに所定の角度を成してナビECUに固定されている。具体的には、ジャイロスコープ13の検出軸とGセンサ16の感度方向は直交関係にある。図2に、車両2内におけるジャイロスコープ13とGセンサ16との配置関係を示す。ジャイロスコープ13の検出軸が車両の垂直方向に対して傾いている角度をαとすると、Gセンサ16の感度方向が車両の進行方向に対して傾いている角度もαとなる。
【0036】
外部メモリ制御装置19は、DVD−ROM、HDD(ハードディスクドライブ)、あるいはメモリカード等の外部記憶媒体に対して、データの読み出しおよび可能であればデータの書き込みの制御を行う。上記外部記憶媒体が記憶している情報としては、上記した位置検出の精度向上のためのいわゆるマップマッチング用データ、地図データおよび目印データを含む各種データ、カーナビゲーション装置1の動作のためのプログラム等がある。
【0037】
また、カーナビゲーション装置は、携帯電話13など移動体通信機器により、外部ネットワーク14との接続を介して、インターネット、専用の情報センター等に接続することができる。
【0038】
制御回路18は、通常のコンピュータとして構成されており、内部にはCPU、ROM、RAM、フラッシュメモリ、I/Oおよびこれらの構成を接続するバスラインが備えられている。制御回路18は、ROM、外部メモリ制御装置19から読み出したカーナビゲーション装置1の動作のためのプログラムを実行し、その実行の際にはROM、RAM、フラッシュメモリから情報を読み出し、RAM、フラッシュメモリに対して情報の書き込みを行い、I/Oを介して位置検出器11、操作スイッチ群17、外部メモリ制御装置19、表示装置20、リモコンセンサ21等と信号の授受を行う。
【0039】
具体的には、この制御回路18は、カーナビゲーション装置1が起動するとき、ROMからブートプログラム、オペレーティングシステム(以下OSと記す)等を読み出して実行し、このOSに基づいたハードウェア制御およびプロセス管理を行う。OS上で動作するプロセスとしては、メニュープログラム、経路探索プログラム、地図表示プログラム、およびその他のプログラムがある。
【0040】
メニュープログラムは、OS上で動作する各種プログラムを、そのプログラムの機能や目的別に階層的にメニュー表示し、そのメニュー表示されたものの中からユーザが選択したプログラムの実行を開始させる。なお、メニュー表示は表示装置20の表示面に当該メニューの画像データを出力することで行い、また、ユーザの選択は、リモコンセンサ21を介したリモートコントロール端末(以下リモコンと称する)22または操作スイッチ群17に対する選択操作(カーソル移動、確定ボタン押下等)によって制御回路18に入力された信号に基づいて検出する。
【0041】
経路探索プログラムは、リモコン22により、あるいは操作スイッチ群17により目的地の位置が入力されると、現在位置からその目的地までの最適な経路を自動的に選択して誘導経路を形成し表示装置20に表示させる。自動的に最適な経路を設定する手法としては、ダイクストラ法等が知られている。
【0042】
地図表示プログラムは、位置検出器11から入力された現在位置情報に基づく車両現在位置マークと、外部メモリ制御装置19より読み出した地図データと、経路探索プログラムによって形成した誘導経路等の付加データとを重ねてその表示装置20の表示面に表示させる。
【0043】
なお、この地図表示プログラムにおいて車両の現在位置を特定する場合には、GPS受信機15による現在位置検出と併せて、推測航法による現在位置検出も行う。
【0044】
この推測航法による現在位置検出に必要な情報として、車両の旋回による相対的な方位変化の量がある。この車両の相対方位変化を算出するためのプログラムとして、相対方位変化量補正プログラムがOS上で定期的に実行されている。以下、この相対方位変化量補正プログラムについて説明する。
【0045】
この相対方位変化量補正プログラムは、基本的にジャイロスコープ13の検出する角速度から車両の空間中の旋回による方位変化を算出するものである。しかし、ジャイロスコープ13の検出軸は、検出軸の車両の垂直方向からのずれ、路面の変化による車両の角度のずれ等によって空間中の鉛直方向からずれる(図12〜図14参照)。またジャイロスコープ13の個体間のばらつきにより、検出した角速度に対する制御回路18への出力値の比(ゲイン)が個々のジャイロスコープ13で異なり、ゲイン誤差εが生ずる。そこで、相対方位変化量補正プログラムは、方位変化の算出の際に、これらのずれの成分を補正する。
【0046】
図3に、この相対方位変化量補正プログラムのフローチャートを示す。なお、このステップ210〜250の処理は、繰り返し実行され、その繰り返しの過程において計算結果が漸次精度のよいものに近づいていくようになっている。なお、この繰り返しの処理において繰り返し用いられる変数については、制御回路18のフラッシュメモリに記録されるようになっている。
【0047】
まずステップ210では、周知のカルマンフィルタの方法を用いて、図2における検出軸の車両の垂直方向からのずれ角度αとゲイン誤差εから成る値εcosαを求める。
【0048】
このステップ210の処理の詳細を図4に示す。まずステップ310で、GPS受信機15から受信している現在位置情報に基づいて、車両の相対方位変化量、すなわち車両の旋回角を算出する。次にステップ320では、カルマンフィルタを用いてゲイン補正係数gain=1/(εcosα)を求める。なお、カルマンフィルタによってジャイロスコープ13のゲイン補正係数を求める方法の詳細は、上記した特許文献1に詳述されている。
【0049】
次にステップ220では、Gセンサ16の出力G、車速センサ14からの入力に基づく車速の時間微分、および前回のステップ240の処理において求めた角度αから、車両の傾斜角、すなわち車両の垂直方向が鉛直方向に対して成す角θを算出する。
【0050】
このステップ220の処理の詳細を図5に示す。ステップ510では、車速センサ14から入力された車速パルス信号から車速を算出し、その車速の時間微分をとることで車両2の加速度aを算出する。次にステップ520では、前回のサイクルにおけるステップ230の処理にて算出したg_offset値、Gセンサ16の出力G、およびステップ510で算出した車両加速度aから、車両の水平面に対する絶対傾斜角θを算出する。
【0051】
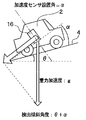
ここで、g_offset値について説明する。いまGセンサ16の感度方向が車両の水平方向に対して角度αだけ傾いており、また車両が水平からθ傾いている場合、Gセンサ16の出力Gは、G=g・sin(θ+α)+acosα+δで表される。ここで、aは上記した車両加速度aであり、δはGセンサ16の固体差に起因する出力値の設計値からのずれ、すなわち単体オフセット誤差である。図6に、車両2の傾き角がθ(<0)、Gセンサ16の感度方向の車両に対する傾きがα(<0)の場合のGセンサ16の傾きの状態を示す。
【0052】
本実施形態においては、sin(θ+α)をsinθ+sinαに近似し、acosαをaに近似する。本実施形態においては、αは−30°〜+5°、θは−5°〜+5°の範囲内にある場合を想定しており、この範囲内においては上記近似は十分精度のよいものである。図7に、上記θ、αの範囲内におけるsin(θ+α)とsinθ+sinαの差をグラフで示す。横軸はθ、縦軸はsinθ+sinα−sin(θ+α)を表し、曲線51〜58のそれぞれが特定の角度αの値における縦軸と横軸の値の関係を示している。
【0053】
上記のように近似することでGセンサ16の式はG=g・sinθ+a+(g・sinα+δ)となる。g_offset値は、この括弧内の値g・sinα+δである。これが、図3のステップ230で算出される値である。
【0054】
この近似された式をθについて解くと、θ=sin-1{(G−a−g_offset)/g}となる。ステップ520では、この式を用いて出力G、a、g_offsetからθを算出する。
【0055】
次にステップ230では、GPS受信機15から受信した位置情報に基づく車両の鉛直方向の速度に基づいて、g_offset値を算出する。
【0056】
図8に、ステップ230の処理の詳細を示す。ステップ810では、GPS受信機15の測位条件の判定、すなわち、GPS受信機15の位置特定の精度が良好であるか否かの判定を行う。位置特定の精度が良好であるか否かは、GPS受信機15から出力される検出の誤差が所定の値より小さいか大きいかによって判定してもよいし、また、DOP値が所定の値より小さいか大きいかによって判定してもよい。
【0057】
そして、ステップ820では、GPS受信機15が使用可能であるか否かを判定し、使用可能であればステップ840に進み、使用可能でなければステップ230の処理を終了する。GPS受信機15が使用可能であるか否かは、GPS受信機15の位置特定の精度が良好であるか否かによって判定する。
【0058】
ステップ840では、車速センサ14から受信した車速パルス信号から得られた車速vの鉛直方向の成分vsinθが、GPS受信機15から出力された車両2の鉛直方向の位置の変化から算出される車両2の鉛直方向の速度Vと同じ値になるようなg_offset値を設定する。具体的には、G−a−g・V/vの値をg_offset値とする。これは、算出された2つの鉛直方向の速度が等しいという条件vsinθ=Vと、ステップ520において近似的に得られた条件G=g・sinθ+a+g_offsetからθを除去することによって得られる式である。
【0059】
次にステップ240では、g_offsetから、加速度センサの車両に対する絶対傾斜角αを算出する。図9に、ステップ230の処理の詳細を示す。ステップ910では、Gセンサ16の単体オフセット誤差がないものと仮定することによって成り立つ式g_offset=g・sinαを用いて、ステップ230で算出されたg_offssetの値からα=sin-1(g_offset/g)を算出する。
【0060】
次にステップ250では、ステップ210で算出したgain、ステップ220で算出したθ、ステップ240で算出したαから、車両の旋回の角速度を算出する。
【0061】
図10に、ステップ250の処理の詳細を示す。ステップ410では、gyro_out・gain・cosα/cos(α+θ)の値を、車両の旋回の角速度yawとする。これは、ステップ210でカルマンフィルタを用いて算出したgainの値は、ステップ210が何度も繰り返されることによって、1/(ε・cosα)の値に収束するから、最終的にはgyro_out・gain・cosα/cos(α+θ)=gyro_out/{ε・cos(α+θ)}となるからである。
【0062】
このようなカーナビゲーション装置1の作動により、図3のステップ210〜250の処理が繰り返され、結果としてカーナビゲーション装置1は、カーナビゲーション装置1によって特定した鉛直方向への走行速度を用いることによって、加速度センサの車両に対する絶対傾斜角を算出することができる。従って、Gセンサ16に対して所定の角度で車両2に固定され、検出軸の周りの車両2の旋回の角速度を検出するジャイロスコープ13の一時的な傾斜の角度を、Gセンサ16の出力と車速センサ14によって得られた車両2の移動加速度とに基づいて検出するカーナビゲーション装置1において、Gセンサ16の車両2に対する絶対傾斜角θを走行しながら算出することができるようにすることができ、ひいては車両2の鉛直軸の周りの旋回角を検出することができる。
(第2実施形態)
次に、本発明の第2実施形態について説明する。本実施形態は、図3に示した処理のステップ230の詳細な処理のみが第1実施形態とことなる。図11に、本実施形態におけるステップ230の詳細処理の内容を示す。
【0063】
ステップ110、ステップ120の処理は、それぞれ図8のステップ810、820の処理と同等である。
【0064】
ステップ130では、車両2が水平走行をしているか否かを検出する。具体的には、GPS受信機15から受信した車両の鉛直方向の位置情報の変化から、車両2の鉛直方向の速度を算出し、この速度が所定の値以下であるか否かによって、水平走行をしているか否かを判定する。この場合、例えば小さな丘の上り下りの場合には水平走行を行っていると判定せず、高速道路の平坦な道を走行している場合には水平走行を行っていると判定するように、上記所定の値を設定する。
【0065】
ステップ140では、ステップ130の検出結果が水平走行しているものである旨のものか否かを判定し、水平走行している旨のものなら処理はステップ150に進み、そうでないならステップ230の処理は終了する。
【0066】
ステップ150では、車速センサ14から受信した車速パルス信号から得られた車速vの鉛直方向の成分vsinθが、ゼロになるようなg_offset値を設定する。具体的には、G−aの値をg_offset値とする。これは、現在車両は平坦な道を走行しているという条件sinθ=0と、ステップ520において近似的に得られた条件G=g・sinθ+a+g_offsetによって得られる式である。
【0067】
以上の様なカーナビゲーション装置1の作動により、第1実施形態と同様の効果を得ることができる。
【図面の簡単な説明】
【図1】本発明の第1実施形態に係るカーナビゲーション装置1の構成を示す図である。
【図2】車両2内におけるジャイロスコープ13とGセンサ16との配置関係を示す図である。
【図3】相対方位変化量補正プログラムのフローチャートである。
【図4】図3のステップ210の処理の詳細のフローチャートである。
【図5】図3のステップ220の処理の詳細のフローチャートである。
【図6】車両2の傾き角がθ、Gセンサ16の感度方向の車両に対する傾きがαの場合のGセンサ16の傾きの状態を示す図である。
【図7】本実施形態で想定するθ、αの範囲内におけるsin(θ+α)とsinθ+sinαの差を示すグラフである。
【図8】図3のステップ230の処理の詳細のフローチャートである。
【図9】図3のステップ240の処理の詳細のフローチャートである。
【図10】図3のステップ250の処理の詳細のフローチャートである。
【図11】第2実施形態における、図3のステップ230の処理の詳細のフローチャートである。
【図12】車両の実際の旋回による旋回軸の回りの角速度と、ジャイロから出力される値との関係を説明するための図である。
【図13】車両の実際の旋回による旋回軸の回りの角速度と、ジャイロから出力される値との関係を説明するための図である。
【図14】車両の実際の旋回による旋回軸の回りの角速度と、ジャイロから出力される値との関係を説明するための図である。
【図15】車両進行方向の加速度成分を検出するように設置された加速度センサ16を搭載した車両2が、角度θの上り坂4を走行している状態を示す図である。
【図16】車両2への加速度センサ16の取り付け角が図15に示した場合と異なるものを示す図である。
【図17】車両2への加速度センサ16の取り付け角が図15に示した場合と異なるものを示す図である。
【符号の説明】
1…カーナビゲーション装置、2…車両、3…水平な道路、4…上り坂、
5…下り坂、11…位置検出器、12…地磁気センサ、
13…ジャイロスコープ、14…車速センサ、15…GPS受信機、
16…Gセンサ、17…操作スイッチ群、18…制御回路、
19…外部メモリ制御装置、20…表示装置、21…リモコンセンサ、
22…リモコン、23…携帯電話、24…外部ネットワーク。
Claims (3)
- 車両に取り付けられた加速度センサの出力Gと、前記車両の車速パルス信号に基づく車速vの時間微分である移動加速度aと、に基づいて、水平面に対する前記車両の車両前方の傾斜角θを算出する第1算出手段(220)と、
他律航法によって前記車両の鉛直方向への移動速度Vを特定する鉛直速度特定手段(15)と、
前記出力Gと、前記移動加速度aと、前記鉛直速度特定手段が特定した前記鉛直方向への移動速度Vと、前記車速パルス信号に基づく前記車速vと、に基づいて、前記加速度センサの前記車両に対する車両前方の傾斜角αを、式
α=sin−1{(G−a−g・V/v)/g}
によって算出する第2算出手段(230、240)と、
前記加速度センサの感度方向に対して検出軸が直交するように前記車両に固定され、当該検出軸の周りの前記車両の旋回の角速度を出力するジャイロスコープの出力gyro_outの補正係数gainを算出し、当該補正係数gainの算出において、当該ジャイロスコープの出力から得られた角速度を積算して算出した相対方位変化量と、GPS( Global Positioning System )から得られる方位の差分より算出される相対方位変化量と、の比較により、当該補正係数gainが1/(εcosα)(ただし、値εは前記加速度センサの定常的なゲイン誤差)となるような算出を行い、さらに、算出された当該補正係数gain、前記第1算出手段が算出した前記傾斜角θ、および、前記第2算出手段が算出した前記傾斜角αに基づいて、式
gyro_out×gain×cosα/cos(α+θ)
の値を、車両の角速度yawとする補正手段(210、250)と、を備え、
前記第1算出手段は、前記傾斜角θを、さらに重力加速度g、および、前記第2算出手段によって算出された傾斜角αとg_offset=g・sinαの関係にある値g_offsetに基づいて、
θ=sin―1{(G−a−g_offset)/g}
によって算出することを特徴とする車両角速度検出装置。 - 前記第2算出手段は、前記鉛直速度特定手段が特定した前記車両の鉛直方向への前記移動速度Vに基づいて、前記車両が水平走行していることを判定する水平判定手段(130、140)と、
前記水平判定手段の判定に基づいて、車両の傾斜角がゼロであると仮定して前記加速度センサの前記車両に対する前記傾斜角αを算出するゼロ仮定手段(150)と、を備えたことを特徴とする請求項1に記載の車両角速度検出装置。 - 前記鉛直速度特定手段は、前記車両の緯度、経度、高度の情報およびこれら情報の検出の誤差に関する情報を出力するGPS受信機であり、
前記第2算出手段は、前記鉛直速度特定手段による位置特定の精度が良好であるか否かを、前記鉛直速度特定手段が出力した前記誤差に関する情報に基づいて判定し、良好である場合に、前記傾斜角αを算出することを特徴とする請求項1または2に記載の車両角速度検出装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003150973A JP4063149B2 (ja) | 2003-05-28 | 2003-05-28 | 車両角速度検出装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003150973A JP4063149B2 (ja) | 2003-05-28 | 2003-05-28 | 車両角速度検出装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004354160A JP2004354160A (ja) | 2004-12-16 |
| JP4063149B2 true JP4063149B2 (ja) | 2008-03-19 |
Family
ID=34046622
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003150973A Expired - Fee Related JP4063149B2 (ja) | 2003-05-28 | 2003-05-28 | 車両角速度検出装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4063149B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019054628A1 (ko) * | 2017-09-15 | 2019-03-21 | 레이시오 유한책임회사 | 노면 경사각 측정 장치 및 노면 경사각 측정 방법 |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102004060977B3 (de) * | 2004-12-17 | 2006-07-13 | Siemens Ag | Navigationscomputer mit einem Gyro-Sensor |
| JP4655901B2 (ja) * | 2005-11-21 | 2011-03-23 | パナソニック株式会社 | 移動体の水平走行判定装置及び方法 |
| JP5057952B2 (ja) * | 2007-12-06 | 2012-10-24 | アルパイン株式会社 | 角速度補正装置及びその補正方法並びにナビゲーション装置 |
| JP2009204459A (ja) * | 2008-02-28 | 2009-09-10 | Denso Corp | 車両用慣性力センサおよび車両の傾斜検出方法 |
| JP2009241742A (ja) * | 2008-03-31 | 2009-10-22 | Nissin Kogyo Co Ltd | 横加速度の導出方法、横加速度の導出装置およびバーハンドル車両用ブレーキ制御装置 |
| JP2012008096A (ja) * | 2010-06-28 | 2012-01-12 | Seiko Epson Corp | バイアス推定方法、姿勢推定方法、バイアス推定装置及び姿勢推定装置 |
| JP5569472B2 (ja) * | 2011-05-31 | 2014-08-13 | 株式会社Jvcケンウッド | 傾斜角検出装置、傾斜角検出方法、およびプログラム |
| JP6354122B2 (ja) * | 2013-06-05 | 2018-07-11 | セイコーエプソン株式会社 | ロボット |
| US9791279B1 (en) * | 2016-06-30 | 2017-10-17 | U-Blox Ag | System for and method of determining angular position of a vehicle |
| CN112945230B (zh) * | 2021-01-26 | 2022-03-25 | 腾讯科技(深圳)有限公司 | 车辆行车状态的识别方法、装置、计算机设备和存储介质 |
| JPWO2024189953A1 (ja) * | 2023-03-14 | 2024-09-19 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10221098A (ja) * | 1997-02-03 | 1998-08-21 | Tokimec Inc | 位置測定装置 |
| JP3375268B2 (ja) * | 1997-05-27 | 2003-02-10 | 株式会社日立製作所 | ナビゲーション装置 |
| JP2000055678A (ja) * | 1998-08-04 | 2000-02-25 | Denso Corp | 車両用現在位置検出装置 |
| JP2002206934A (ja) * | 2001-01-11 | 2002-07-26 | Matsushita Electric Ind Co Ltd | ナビゲーション装置 |
| JP2002243494A (ja) * | 2001-02-13 | 2002-08-28 | Denso Corp | 車載用角速度検出装置、及び車載角速度センサの傾斜角度検出方法,装置 |
-
2003
- 2003-05-28 JP JP2003150973A patent/JP4063149B2/ja not_active Expired - Fee Related
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019054628A1 (ko) * | 2017-09-15 | 2019-03-21 | 레이시오 유한책임회사 | 노면 경사각 측정 장치 및 노면 경사각 측정 방법 |
| KR20190030852A (ko) * | 2017-09-15 | 2019-03-25 | 레이시오 유한책임회사 | 노면 경사각 측정 장치 및 노면 경사각 측정 방법 |
| KR101998476B1 (ko) * | 2017-09-15 | 2019-07-15 | 레이시오 유한책임회사 | 노면 경사각 측정 장치 및 노면 경사각 측정 방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2004354160A (ja) | 2004-12-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4466705B2 (ja) | ナビゲーション装置 | |
| JP5057952B2 (ja) | 角速度補正装置及びその補正方法並びにナビゲーション装置 | |
| JP3380727B2 (ja) | 方位検出センサを使用して角速度補正を行うナビゲーション方法 | |
| US5283743A (en) | Vehicle-direction measuring apparatus | |
| JP4776570B2 (ja) | ナビゲーション装置、傾斜角を用いた角速度補正装置および方法 | |
| JP2003307524A (ja) | 加速度データの補正装置、その補正方法、その補正プログラム、その補正プログラムを記録した記録媒体、および、ナビゲーション装置 | |
| JPH08285621A (ja) | ナビゲーション装置 | |
| JPH10332415A (ja) | ナビゲーション装置 | |
| JP4063149B2 (ja) | 車両角速度検出装置 | |
| JP2009025012A (ja) | 加速度センサオフセット補正装置および方法 | |
| JP2004138553A (ja) | 移動体位置検出装置、移動体位置検出方法、プログラムおよび記録媒体 | |
| JP3868416B2 (ja) | 角速度補正装置 | |
| KR100870091B1 (ko) | 센서를 이용한 회전상태 판단 방법 및 장치 | |
| JP2008032632A (ja) | 角速度センサのキャリブレーション装置および角速度値特定装置 | |
| JP2010271327A (ja) | 角速度検出装置及び角速度検出方法 | |
| JP4376738B2 (ja) | 角速度センサのゼロ点誤差検出装置および方法 | |
| JPH10221097A (ja) | 感度補正方法、ナビゲーション装置及び自動車 | |
| JP5891120B2 (ja) | 速度算出装置、速度算出方法、速度算出プログラム、および記録媒体 | |
| KR20050049071A (ko) | 차량의 정지상태 판단방법과 이를 이용한 차량 항법정보생성방법 및 차량항법장치 | |
| JPH102747A (ja) | ナビゲーション装置 | |
| JP2958020B2 (ja) | 移動車の走行制御装置 | |
| JP4454442B2 (ja) | 角速度センサの感度誤差検出装置 | |
| JP3416694B2 (ja) | 回転角速度算出装置および車両位置算出装置 | |
| JPH0543257B2 (ja) | ||
| JP2006126178A (ja) | ナビゲーション装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050921 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20060728 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20060822 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20061023 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20061219 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070215 |
|
| A911 | Transfer of reconsideration by examiner before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20070226 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20071211 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20071224 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 4063149 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110111 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120111 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130111 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140111 Year of fee payment: 6 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |