JP2012008096A - バイアス推定方法、姿勢推定方法、バイアス推定装置及び姿勢推定装置 - Google Patents
バイアス推定方法、姿勢推定方法、バイアス推定装置及び姿勢推定装置 Download PDFInfo
- Publication number
- JP2012008096A JP2012008096A JP2010146561A JP2010146561A JP2012008096A JP 2012008096 A JP2012008096 A JP 2012008096A JP 2010146561 A JP2010146561 A JP 2010146561A JP 2010146561 A JP2010146561 A JP 2010146561A JP 2012008096 A JP2012008096 A JP 2012008096A
- Authority
- JP
- Japan
- Prior art keywords
- bias
- value
- acceleration sensor
- axis
- posture
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images












Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/10—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration
- G01C21/12—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning
- G01C21/16—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning by integrating acceleration or speed, i.e. inertial navigation
- G01C21/183—Compensation of inertial measurements, e.g. for temperature effects
- G01C21/188—Compensation of inertial measurements, e.g. for temperature effects for accumulated errors, e.g. by coupling inertial systems with absolute positioning systems
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/10—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration
- G01C21/12—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning
- G01C21/16—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning by integrating acceleration or speed, i.e. inertial navigation
- G01C21/183—Compensation of inertial measurements, e.g. for temperature effects
- G01C21/185—Compensation of inertial measurements, e.g. for temperature effects for gravity
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P21/00—Testing or calibrating of apparatus or devices covered by the preceding groups
Abstract
【解決手段】複数軸の加速度センサーを校正用姿勢とした場合の前記複数軸の検出値を用いて、バイアスをゼロと仮定した姿勢角である仮姿勢角が算出される。そして、鉛直方向に向けた一軸の検出値と仮姿勢角とを用いて、当該一軸の検出値に含まれるバイアス値が推定される。
【選択図】図4
Description
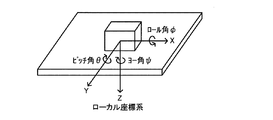
図1は、本実施形態における加速度センサーの説明図である。加速度センサーは、複数軸(多軸)の加速度センサーであり、予め設計された直交する3軸の軸方向それぞれの加速度を検出するように構成されている。以下、加速度センサー自身に設定されている3軸の座標系を「ローカル座標系」という。
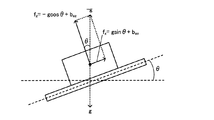
上記では、X軸及びZ軸の2次元平面で考えたが、Y軸も考慮した3次元空間でも同様に考えることができる。3次元空間で考えた場合、重力加速度の各検出軸方向の成分及び各検出軸のバイアス値を考慮して、各検出軸の検出値は次式(1)で与えられる。

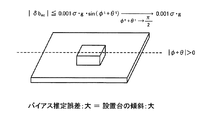
先ず、加速度センサーの校正用姿勢を初期設定する(ステップA1)。具体的には、3軸の検出軸のうちの任意の一軸を鉛直方向に向けた校正用姿勢で加速度センサーを略水平な設置台に設置する。
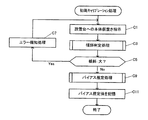
鉛直方向に向けた検出軸のバイアス推定誤差は、姿勢角誤差“(δφ=φt−φ,δθ=θt−θ)”の大きさから算出・推定することができる。ここでは、Z軸を鉛直方向に向けた校正用姿勢で加速度センサーを設置した場合を例に挙げて説明する。つまり、Z軸のバイアス推定値“bt az”に含まれるバイアス推定誤差“δbaz”を算出する場合である。
加速度センサーの各検出軸のバイアス値が推定できれば、加速度センサーの姿勢を推定することができる。そこで、以下に加速度センサーの姿勢推定方法について説明する。
次に、上記の原理に従って加速度センサーのバイアス値を推定するバイアス推定装置及び加速度センサーの姿勢を推定する姿勢推定装置の実施例について説明する。ここでは、バイアス推定装置及び姿勢推定装置を具備する電子機器としてカーナビゲーション装置を例に挙げて説明する。
図8は、本実施例におけるナビゲーションシステム1のシステム構成を示す図である。ナビゲーションシステム1は、移動体の一種である四輪自動車(以下、単に「自動車」と称す。)に搭載されるカーナビゲーション装置2を備えて構成される。
図9は、カーナビゲーション装置2の機能構成の一例を示すブロック図である。カーナビゲーション装置2は、処理部10と、操作部20と、表示部30と、音出力部40と、通信部50と、時計部60と、IMU70と、記憶部80とを備えて構成される。
図9に示すように、記憶部80には、プログラムとして、処理部10により読み出され、メイン処理(図12参照)として実行されるメインプログラム81が記憶されている。また、メインプログラム81には、初期キャリブレーション処理(図13参照)として実行される初期キャリブレーションプログラム811と、取付時初期設定処理(図14参照)として実行される取付時初期設定プログラム813と、ナビゲーション処理として実行されるナビゲーションプログラム815とがサブルーチンとして含まれている。
図12は、記憶部80に記憶されているメインプログラム81に従って処理部10が実行するメイン処理の流れを示すフローチャートである。
本願発明者は、上述した加速度センサーのバイアス推定及び加速度センサーの検出値補正の性能を評価するための実験を行った。具体的には、本実施例で説明した慣性航法と、衛星測位システムの一種であるGPSとを利用して自動車の周回実験を行い、速度を算出する実験を行った。
本実施形態によれば、複数軸の加速度センサーを校正用姿勢とした場合の前記複数軸の検出値を用いて、バイアスをゼロと仮定した姿勢角である仮姿勢角が算出される。そして、鉛直方向に向けた一軸の検出値と仮姿勢角とを用いて、当該一軸の検出値に含まれるバイアス値が推定される。
以下、変形例について説明するが、上述した実施例と共通する構成については上述した実施例と同じ符号を付して、その説明を省略する。
上述した実施例では、四輪自動車に搭載するナビゲーション装置に本発明を適用した場合を例に挙げて説明したが、本発明を適用可能な電子機器はこれに限られるわけではない。例えば、二輪自動車に搭載するナビゲーション装置に適用してもよいし、携帯型ナビゲーション装置に適用することとしてもよい。
上述した実施例では、ナビゲーション装置の処理部が加速度センサーのバイアス推定及びバイアス補正を行うものとして説明した。つまり、加速度センサーを搭載した電子機器において、電子機器のプロセッサーがバイアス推定及びバイアス補正を行うこととした。しかし、これらの処理の主体は適宜設定変更可能である。
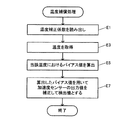
上述した実施形態において、加速度センサーは少なくとも温度補償されたセンサーであるものとして説明した。すなわち、製品の出荷段階において加速度センサーは温度補償済みであるものとして説明した。しかし、製品の出荷後に温度補償を行って加速度センサーの出力を補償することも可能である。
先ず、処理部は、記憶部から温度補正係数を読み出す(ステップE1)。そして、処理部は、現在の温度を取得する(ステップE3)。温度は、センサーモジュール或いは電子機器に温度センサーを具備させておくことで取得することができる。
加速度センサーの出力には、センサーモジュールに対する加速度センサーの取り付けが正確でないことに起因するミスアライメント誤差や、ミスアライメントに起因する他軸感度誤差といった誤差成分も含まれる。そのため、温度補償ばかりでなく、これらの誤差成分の補償も併せて行い、その結果として得られる加速度センサーの検出値を用いて本実施形態のバイアス推定を行うこととすればより好適である。
加速度センサーの軸数を3軸として説明したが、3軸以上としてもよい。例えば、直交3軸の正負それぞれの軸方向を別々の軸とみなした6軸としてもよいし、原点のみが同一である2種類の直交3軸座標系をねじって設定して6軸とすることとしてもよい。また、直交以外の軸座標系としてもよい。何れにせよ、加速度を3次元で検出できればよく、そのためには複数軸(より正確には3軸以上)である必要がある。
Claims (8)
- 複数軸の加速度センサーの一軸を鉛直方向に向けた校正用姿勢とした場合の前記複数軸の検出値を用いて、バイアスをゼロと仮定した姿勢角である仮姿勢角を算出することと、
前記一軸の検出値と前記仮姿勢角とを用いて、前記一軸の検出値に含まれるバイアス値を推定することと、
を含むバイアス推定方法。 - 前記仮姿勢角と前記バイアス値の誤差分散とを用いて、前記バイアス値の推定誤差を算出することを更に含む、
請求項1に記載のバイアス推定方法。 - 前記一軸の検出値に含まれるバイアス値の推定誤差は、前記仮姿勢角と、前記仮姿勢角の誤差とを用いて近似可能であり、
前記バイアス値の推定誤差を算出することは、前記仮姿勢角の誤差が前記バイアス値の誤差分散を用いて推定可能であることに基づいて、前記一軸の検出値に含まれるバイアス値の推定誤差を算出することである、
請求項2に記載のバイアス推定方法。 - 前記加速度センサーは少なくとも温度補償されたセンサーである、
請求項1〜3の何れか一項に記載のバイアス推定方法。 - 少なくとも温度補償を行って前記加速度センサーの出力を補償して前記検出値とすることを更に含む、
請求項1〜3の何れか一項に記載のバイアス推定方法。 - 請求項1〜5の何れか一項に記載のバイアス推定方法により推定されたバイアス値と、前記加速度センサーの各軸の検出値とを用いて、前記加速度センサーの姿勢を推定する姿勢推定方法。
- 複数軸の加速度センサーの一軸を鉛直方向に向けた校正用姿勢とした場合の前記複数軸の検出値を用いて、バイアスをゼロと仮定した姿勢角である仮姿勢角を算出する仮姿勢角算出部と、
前記一軸の検出値と前記仮姿勢角とを用いて、前記一軸の検出値に含まれるバイアス値を推定するバイアス推定部と、
を備えたバイアス推定装置。 - 複数軸の加速度センサーと、
前記加速度センサーの前記複数軸の検出値に含まれるバイアス値を推定する請求項7に記載のバイアス推定装置と、
前記バイアス推定装置で推定されたバイアス値と、前記加速度センサーの前記複数軸の検出値とを用いて、前記加速度センサーの姿勢を推定する姿勢推定部と、
を備えた姿勢推定装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010146561A JP2012008096A (ja) | 2010-06-28 | 2010-06-28 | バイアス推定方法、姿勢推定方法、バイアス推定装置及び姿勢推定装置 |
| US13/170,139 US9273967B2 (en) | 2010-06-28 | 2011-06-27 | Bias estimating method, posture estimating method, bias estimating device, and posture estimating device |
| CN201110177231.6A CN102313822B (zh) | 2010-06-28 | 2011-06-28 | 偏置估算方法、姿势估算方法、偏置估算装置及姿势估算装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010146561A JP2012008096A (ja) | 2010-06-28 | 2010-06-28 | バイアス推定方法、姿勢推定方法、バイアス推定装置及び姿勢推定装置 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015081552A Division JP2015135349A (ja) | 2015-04-13 | 2015-04-13 | バイアス推定方法、姿勢推定方法、バイアス推定装置及び姿勢推定装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012008096A true JP2012008096A (ja) | 2012-01-12 |
| JP2012008096A5 JP2012008096A5 (ja) | 2013-08-08 |
Family
ID=45353345
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010146561A Pending JP2012008096A (ja) | 2010-06-28 | 2010-06-28 | バイアス推定方法、姿勢推定方法、バイアス推定装置及び姿勢推定装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US9273967B2 (ja) |
| JP (1) | JP2012008096A (ja) |
| CN (1) | CN102313822B (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2014171227A1 (ja) * | 2013-04-17 | 2014-10-23 | 古野電気株式会社 | 姿勢角推定装置およびそれを備える移動状態検出装置 |
| WO2018100964A1 (ja) * | 2016-11-30 | 2018-06-07 | パイオニア株式会社 | 初期化装置、初期化方法及び初期化装置用プログラム |
Families Citing this family (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6094026B2 (ja) * | 2011-03-02 | 2017-03-15 | セイコーエプソン株式会社 | 姿勢判定方法、位置算出方法及び姿勢判定装置 |
| CN102353351B (zh) * | 2011-06-28 | 2014-01-15 | 惠州Tcl移动通信有限公司 | 偏侧拍摄角度检测方法、倾斜拍摄角度检测方法及手机 |
| JP2014106206A (ja) * | 2012-11-29 | 2014-06-09 | Tamagawa Seiki Co Ltd | 慣性センサおよびその演算誤差軽減方法 |
| JP6167747B2 (ja) * | 2013-08-14 | 2017-07-26 | セイコーエプソン株式会社 | バイアス算出方法及びバイアス算出装置 |
| JP2015094631A (ja) * | 2013-11-11 | 2015-05-18 | セイコーエプソン株式会社 | 位置算出装置及び位置算出方法 |
| CN104502632B (zh) * | 2014-11-28 | 2017-06-16 | 郑州合智汇金电子科技有限公司 | 一种石英加速度传感器的温度补偿方法 |
| JP6394399B2 (ja) * | 2015-01-09 | 2018-09-26 | 株式会社デンソー | 回転角検出装置 |
| CN106428034B (zh) * | 2016-09-28 | 2019-01-08 | 中车大连电力牵引研发中心有限公司 | 列车牵引逆变器的转矩控制装置 |
| CN108051839B (zh) * | 2017-10-27 | 2021-11-05 | 成都天合世纪科技有限责任公司 | 一种车载三维定位装置及三维定位的方法 |
| CN111655074B (zh) * | 2018-01-31 | 2022-09-09 | 奥诗莱格金属技术有限责任公司 | 可电动地调节高度的台及其控制方法 |
| CN110637266A (zh) * | 2018-04-28 | 2019-12-31 | 深圳市大疆创新科技有限公司 | 云台的控制方法和云台 |
| CN109084755B (zh) * | 2018-06-14 | 2021-06-25 | 东南大学 | 一种基于重力视速度与参数辨识的加速度计零偏估计方法 |
| CN113375699A (zh) * | 2021-08-12 | 2021-09-10 | 智道网联科技(北京)有限公司 | 惯性测量单元安装误差角标定方法及相关设备 |
| CN113758515B (zh) * | 2021-08-16 | 2023-04-07 | 深圳市睿联技术股份有限公司 | 零点校准方法、装置、电子设备及计算机可读存储介质 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5610815A (en) * | 1989-12-11 | 1997-03-11 | Caterpillar Inc. | Integrated vehicle positioning and navigation system, apparatus and method |
| AU642638B2 (en) * | 1989-12-11 | 1993-10-28 | Caterpillar Inc. | Integrated vehicle positioning and navigation system, apparatus and method |
| JPH10267651A (ja) | 1997-03-28 | 1998-10-09 | Data Tec:Kk | 傾斜測定方法及び傾斜測定装置 |
| USH1840H (en) * | 1998-09-23 | 2000-02-01 | Caterpillar Inc. | Apparatus and method of providing calibration information to an operator of a work machine |
| FR2832804B1 (fr) * | 2001-11-23 | 2004-01-30 | Sagem | Procede de mesure accelerometrique, compensee thermiquement, avec au moins un dispositif a deux resonateurs vibrants |
| JP4063149B2 (ja) * | 2003-05-28 | 2008-03-19 | 株式会社デンソー | 車両角速度検出装置 |
| GB0511942D0 (en) | 2005-06-13 | 2005-07-20 | Nokia Corp | Atmosphere model |
| JP2007040763A (ja) * | 2005-08-01 | 2007-02-15 | Toyota Motor Corp | 加速度センサの補正装置 |
| US9062971B2 (en) * | 2008-03-06 | 2015-06-23 | Texas Instruments Incorporated | E-compass, tilt sensor, memory and processor with coarse detilting procedure |
| US8150651B2 (en) | 2008-06-11 | 2012-04-03 | Trimble Navigation Limited | Acceleration compensated inclinometer |
| CN101290326B (zh) * | 2008-06-13 | 2010-07-07 | 哈尔滨工程大学 | 石英挠性加速度计测量组件的参数辨识标定方法 |
-
2010
- 2010-06-28 JP JP2010146561A patent/JP2012008096A/ja active Pending
-
2011
- 2011-06-27 US US13/170,139 patent/US9273967B2/en active Active
- 2011-06-28 CN CN201110177231.6A patent/CN102313822B/zh active Active
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2014171227A1 (ja) * | 2013-04-17 | 2014-10-23 | 古野電気株式会社 | 姿勢角推定装置およびそれを備える移動状態検出装置 |
| WO2018100964A1 (ja) * | 2016-11-30 | 2018-06-07 | パイオニア株式会社 | 初期化装置、初期化方法及び初期化装置用プログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| CN102313822A (zh) | 2012-01-11 |
| US9273967B2 (en) | 2016-03-01 |
| US20110320164A1 (en) | 2011-12-29 |
| CN102313822B (zh) | 2016-05-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2012008096A (ja) | バイアス推定方法、姿勢推定方法、バイアス推定装置及び姿勢推定装置 | |
| JP6094026B2 (ja) | 姿勢判定方法、位置算出方法及び姿勢判定装置 | |
| US10641625B2 (en) | Method and apparatus for calibrating a magnetic sensor | |
| JP6257865B2 (ja) | 測位装置および測位方法 | |
| US9759567B2 (en) | Position calculation method and position calculation device | |
| JP5602070B2 (ja) | 位置標定装置、位置標定装置の位置標定方法および位置標定プログラム | |
| EP2601479B1 (en) | Pnd repositioning detector for better navigation accuracy in a car | |
| JP2012173190A (ja) | 測位システム、測位方法 | |
| JP4941199B2 (ja) | ナビゲーション装置 | |
| US20190212146A1 (en) | Positioning system and positioning method | |
| JP2009236532A (ja) | 測位方法、プログラム及び測位装置 | |
| JP2012154769A (ja) | 加速度検出方法、位置算出方法及び加速度検出装置 | |
| EP2930467A1 (en) | A system and method for sensing the inclination of a moving platform with respect to gravity | |
| JP2017166895A (ja) | 電子機器及びセンサ較正方法、センサ較正プログラム | |
| JP5119967B2 (ja) | 測位方法、プログラム及び測位装置 | |
| JP5678748B2 (ja) | 端末装置及び地磁気環境判定プログラム | |
| JP2015135349A (ja) | バイアス推定方法、姿勢推定方法、バイアス推定装置及び姿勢推定装置 | |
| JP5511088B2 (ja) | 自律測位に用いる重力ベクトルを補正する携帯装置、プログラム及び方法 | |
| JP2014219340A (ja) | オフセット補正方法及びオフセット補正装置 | |
| JP2011209162A (ja) | ナビゲーション装置 | |
| JP2013122384A (ja) | カルマンフィルタ、及び、状態推定装置 | |
| US20210116247A1 (en) | Method for harmonising two inertial measurement units with one another and navigation system implementing this method | |
| JP6384194B2 (ja) | 情報処理装置、情報処理方法及び情報処理プログラム | |
| JP2015004593A (ja) | ナビゲーション装置 | |
| JP5893254B2 (ja) | 自律測位に用いる重力ベクトルを補正する携帯装置、プログラム及び方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130621 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130621 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140320 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140507 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140707 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20150113 |