JP4029171B2 - 像振れ補正装置及びカメラ、像振れ補正方法 - Google Patents
像振れ補正装置及びカメラ、像振れ補正方法 Download PDFInfo
- Publication number
- JP4029171B2 JP4029171B2 JP2005296731A JP2005296731A JP4029171B2 JP 4029171 B2 JP4029171 B2 JP 4029171B2 JP 2005296731 A JP2005296731 A JP 2005296731A JP 2005296731 A JP2005296731 A JP 2005296731A JP 4029171 B2 JP4029171 B2 JP 4029171B2
- Authority
- JP
- Japan
- Prior art keywords
- shake
- image blur
- image
- blur correction
- optical system
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images































Landscapes
- Shutters For Cameras (AREA)
- Adjustment Of Camera Lenses (AREA)
- Studio Devices (AREA)
Description
図31は、像振れ補正機構を示す側面断面図である。図31において、像振れ補正光学系1は、レンズ鏡筒2内に配置される。即ち、両者は、一体のものである。
マグネット7とコイル6とヨーク9とヨーク10とで構成される駆動用アクチュエータは、互いに直行する方向に2組配置され、X軸方向とY軸方向にそれぞれ力を発生する構造となっている。
このレンズ鏡筒2の側壁には、基端側(ヨーク9)にスリット板4が配置され、先端側にIRED(赤外発光素子)8が配置される。スリット板4には、IRED8の光線が通過する長穴(スリット)が設けられる。
図32は、像振れ補正光学系(レンズ鏡筒)の支持構造を断面図である。図32(a)は光軸位置にある状態を示し、図32(b)は光軸位置から移動した状態を示す。
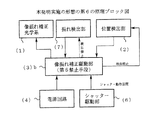
図33は、従来の像振れ補正装置の構成ブロック図である。図33において、この像振れ補正装置は、角速度検出回路(X軸)13、角速度検出回路(Y軸)14、測距回路18、測光回路19、マイクロコンピュータユニット(以下「CPU」という)20、メインスイッチ26、半押しスイッチ27、レリーズスイッチ28、電源電池29、光学系51、位置検出素子56X、56Y、レンズ位置検出回路(X軸)57X、レンズ位置検出回路(Y軸)57Y、レンズ位置検出回路(AF)58、アクチュエータ駆動回路(X軸)59X、アクチュエータ駆動回路(Y軸)59Y、シャッター駆動回路(AF)60、アクチュエータ61X、61Y、ステッピングモータ62、DC/DCコンバータ64等を備える。
測距回路18と測光回路19がカメラの撮影準備動作を開始すると、同時に角速度検出回路(X軸)13と角速度検出回路(Y軸)14がカメラの振れ運動を検出することを開始する。角速度検出センサは、通常コリオリ力を検出する圧電振動式角速度センサを用いる。
次に、レリーズ釦の全押しを行うと、レリーズスイッチ28がオンし、フォーカシングレンズ55が、シャッター駆動回路60からステッピングモータ62を制御して駆動される。この動作と同時に像振れ補正光学系54による像振れ補正機構の制御も開始される。
現在の像振れ補正光学系の位置検出は、レンズ位置検出回路(X軸)57X、レンズ位置検出回路(Y軸)57YとCPU20との全体で行う。位置検出素子56X、56Yには、通常PSDが用いられる。CPU20は、PSDの出力電流よって像振れ補正光学系の位置を演算により求める。
アクチュエータ61X、61Yは、この駆動電流をもとにして、像振れ補正光学系を光軸に直交する面内で動かし、カメラの手振れによる像振れを補正制御する。
このカメラ内のノイズ源としては、電源回路にあるDC/DCコンバータのスイッチングノイズ、シャッター駆動時のステッピングモータ駆動ノイズ、フォーカシングレンズ駆動時のモータノイズ等があるが、これらのノイズは、それら装置の特性・性格によるものであり低減させることは困難である。
本発明は、このような従来の課題を解決すべく創作されたもので、上述したノイズの影響を有効に低減できる手段を備えた像振れ補正装置及びカメラ、像振れ補正方法を提供することを目的とする。
本発明のカメラは、上述した像振れ補正装置の何れかを備える。
次に、前記の如く構成される本発明の像振れ補正装置の作用を説明する。
本発明の像振れ補正装置では、シャッター駆動部の動作期間内、振れ検出部は振れの検出を行わない。
また、ステッピングモータの駆動信号が切り替わった後の所定時間は、振れ検出部と位置検出部とは、振れの検出と位置の検出とを行わない。
また、電源回路のスイッチング位相が変化した後の所定時間は、振れ検出部と位置検出部とは、振れの検出と位置の検出とを行わない。
また、位置検出部は、像振れ補正光学系の光軸に直交する方向の位置を検出する。
本発明のカメラについても同様である。
以上のように、本発明では、カメラの振れ量検出や像振れ補正光学系の位置検出を実行する際に、ノイズが発生するタイミングでは動作を禁止し、ノイズの影響がないと考えられる場合に禁止を解除するので、不可避的に発生するノイズを避けることができ、ノイズの影響を効果的に低減できる。
従って、PSDを用いて像振れ補正光学系の位置検出を行う像振れ補正装置の補正精度の向上が図れる。
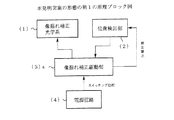
図10は、本発明の第1実施の形態の像振れ補正装置の構成ブロック図である。なお、以下の各実施の形態でも同様であるが、従来例(図33)と同一構成部分には同一符号名称を付してある。
従来例(図33)との相違点は、CPU20内にタイマー制御回路20aを儲け、このタイマー制御回路20aにDC/DCコンバータ64のスイッチング変化から所定時間をカウントさせ、カウントアップ後に像振れ補正機構の振れ検出回路と像振れ補正光学系の位置検出回路のサンプリングを行っている点である。
まず、振れ検出部及び振れ量算出部について説明する。
レンズ鏡筒2内に、像振れ補正機構16を配置し、振れ補正光学系1を像ぶれ補正方向である直交する2方向に独立して移動可能とする。なお、15は、カメラ撮影を行うためのレリーズ釦である。
振れ検出素子13、14は、振動ジャイロの回転によって発生するコリオリ力を、例えば圧電素子で電気信号として発生させる原理によって、カメラに生じた角速度を検出する角速度センサである。
HPフィルタ23は、振れ検出素子13、14に乗った低周波ドリフト成分を除去するのが主な目的である。HPフィルタ23には、外部から振れ検出回路初期化信号が入力する。
このアナログスイッチの制御タイミングは、CPU20が振れ検出素子13、14の立ち上がり特性に基づいた時間を記憶したデータを用いて制御する。
基準電圧発生回路25は、振れ検出素子13、14及び各回路を動作させるための基準電圧を生成する回路であり、独立のDC/DCコンバータ等により電圧変動をなるべく抑
えた構成となっている。
光学的位置検出素子には、前述したようにPSDが用いられる。PSDの検出部の全長は、後述するIRED(赤外線発光LED)とスリットの位置関係及びスリット幅と防止レンズの可動範囲から決定する。
円環型のプリント基板17には、赤外線発光素子であるIRED8a、8bが取り付けられている。
弾性体支持部材とは、ベリリウム銅、りん青銅のような銅合金以外の弾性体支持部材に金メッキ等の導電率の高い表面処理を施した物を指している。弾性体支持部材の片側は、レンズ鏡筒2に挿入され、もう一方は円環状プリント基板17に半田付けして固定してある。
レンズ鏡筒2に取り付けられたスリット板4aの動き、つまり、像振れ補正光学系1のY方向への動きにより、スリットを通過したスポット光の入射位置が、1次元PSD5aの受光素子面上を移動し、PSDの公知である原理により、両極端子から流れる電流値がスポット光の入射する位置によって変化する。
PSDには、逆バイアス電圧回路65から逆バイアス電圧が供給され、スリット位置によって決まる光電流がI1、I2に分流して流れ出る。この場合、電流の取り出し電極に対しスリットが近づくと電流は増加する。この様子を図16(1次元PSD上のスリット位置と出力電流との関係図)に示してある。
電圧増幅回路67a、67bの出力は、演算部、つまり、CPU20のA/D変換入力端子に入力し、CPU20は、図14に示す式(1)に基づいて入射位置Xを演算によっ
て求める。
これらの出力をマイコンのA/D変換ポートへただ入力しするだけで、Xの位置相当の出力が得られる方式もあり、複雑な演算をCPU20を用いずに処理している。
例えば、α・V1+α・V2の電圧が、基準電圧VREFの電位に対し1(V)になるように、電圧増幅回路のゲインを可変するか、またIREDの光電流を変化させるかの、いずれかの制御を用いて、α・V2−α・V1を出力する。
よって、下記条件が成立し位置Xを示す電圧V0は、基準電圧VREFの電位に対し−1(V)を出力する。
α・V1+α・V2=1(V)・・・・(2)
V2=0・・・・(3)
V0={(α・V2−α・V1)/(α・V1+α・V2)}=−1(V)・・・・(4)
一方、スリットがI2側電極の端にあると、V1=0(V)となり、下記に示すように位置Xを示す電圧V0は+1(V)となる。
V1=0・・・・(6)
V0={(α・V2−α・V1)/(α・V1+α・V2)}=+1(V)・・・・(7)
図17は、位置検出部(2)の入射位置と出力電圧との関係図である。図17において、横軸はPSD上に当たる光の入射位置を表し、Y軸はPSD上の入射位置Xに相当する出力電圧V0を表す。
次に、角速度の積分演算結果によって振れ補正レンズの適正補正量を算出する算出部について説明する。
図18では、カメラに対し垂直方向であるY方向の波形を示し、X方向の説明は省略するが、制御は全く同一である。t0でカメラのレリーズ釦の半押し操作が行われ、半押しスイッチ27がオンすると同時にDC/DCコンバータ64の昇圧スイッチング動作が開始し、振れ検出回路の電源が立ち上がる。立ち上がり直後の振れ検出素子の出力にはノイズ成分が多く含まれ、安定するまでに時間がかかる。
振れ検出素子の電源オン後のアナログスイッチオン時間は50ms以下とし、レリーズタイムラグが長くならないようにしている。t2以降は振れの検出回路を動作させて出力
を得る。
ここでは、詳細の説明は省略するが、角速度出力波形の解析をCPU20で行い、角速度がゼロと予測したタイミングt3で、振れ検出回路のアナログスイッチを再度オンして、角速度出力がゼロとなるように補正する。
これにより、振れ検出部の出力は、概略角速度がゼロのタイミングで所定電圧になるようU振幅に矯正され、像振れ補正制御の開始時点から正確な補正が可能となる。
ここで、積分演算とは、本実施の形態では、CPU20によるデジタル演算であり、算出した角速度ωを積算して、振れ角度θcを算出する。振れ角速度ωは理論上、次式(8)により振れ角度θc〔単位:°〕に変換される。
CPU20は、求めた振れ角度θcよって像振れ量演算を周期的に繰り返し実行し、レリーズ釦の全押し動作を待つのである。
次に、図10の構成ブロック図に示すアクチュエータ駆動回路59X、59Yの入力電圧とVCM(ボイスコイル)印加電圧について説明する。CPU20からの出力Voutと内部基準電圧Vref(=2.0V)の差に比例した電圧がVCM(ボイスコイル)に印加される。
駆動電圧の値とボイスコイルに流れる電流はほぼ比例関係であり、よって、像振れ補正光学系もこれに比例した駆動量を移動する。この様子を図19(像振れ補正光学系の駆動特性図)に示す。
次に、図18に示すt4のタイミングでレリーズ釦を深く押し込むと、レリーズスイッチ28がオンし、撮影動作に移行する。像振れ補正機構は、この時点から露光が終了するt11までの間、像振れ補正光学系の制御を行う。
この制御は、CPU20がカメラの振れ量から、フィルム面上の像振れを抑えるように像振れ補正機構の像振れ補正光学系の駆動量を求め、このCPU20の出力Voutに応じて、アクチュエータ駆動回路59X、59YがVCM(ボイスコイル)を、像振れ補正光学系が光軸と直行する平面方向にシフトするように像振れ補正駆動することにより実現される。
ている。
図20は、シャッター駆動部の構成ブロック図である。ステッピングモータ駆動信号1及び2は公知の2相励磁式のモータであり、デジタル信号により制御する。この信号はCPU20から制御信号を生成し、図20に示すシャッター駆動部(モータ駆動回路)へ伝達する。
ステッピングモータ駆動トランジスタは2組のブリッジ回路で構成し、2相のステッピングモータに流す電流を交互に反転している。また、ステッピングモータの駆動電源に電圧レギュレータを設けている理由は、電圧を安定化することにより駆動制御を確実に制御して、フォーカシングレンズの駆動及び露出正精度を安定させることを目的としている。
図18において、t4直前のタイミングではステッピングモータ駆動信号1とステッピングモータ駆動信号2は共に位相は、高レベル(以下単に「H」)であり、ステッピングモータは安定状態にある。
そして、t4のタイミングから順番にステッピングモータの位相が交互に変化していく。最初にステッピングモータ駆動信号1の位相が低レベル(以下単に「L」)に変化する。このときトランジスタ33と37はカットオフし、トランジスタ34と38がオンする。このときステッピングモータコイル49の電流は反転し、Yの方向に流れる。このステッピングモータの回転動作によりフォーカシング用レンズは1ステップ分の繰り出しが行われる。
次に、このようにして、片側のステッピングモータの駆動電流の流れる方向が交互に変化するたびにフォーカシングレンズは1ステップずつ繰り出す。さらに、ステッピングモータ駆動信号1の位相がLからHに変化する。このときトランジスタ34と38はカットオフし、トランジスタ33と37がオンする。このときステッピングモータコイル49の電流は反転し、Xの方向に流れる。このときフォーカシング用レンズはさらに1ステップ分の繰り出を行う。
次に、t6ではシャッターの露出動作が開始する。t6からt9まではシャッター開き駆動動作であり、t10からt11までが閉じ動作である。
峻な変化時に発生する逆起電力を吸収し、電圧の振れを抑えてトランジスタやモータドライバICの破壊を防いでいる。
また、ステッピングモータの位相を変化させる場合は、貫通電流によるトランジスタの破壊を防ぐため、信号の切り替え時に100マイクロ秒程度の遅延を設け、トランジスタが全てカットオフする時間を設けている。
図21は、像振れ補正制御部の動作タイムチャートである。図21において、図中の禁止タイミングはt21〜t22、t24〜t25、t27〜t28である。
そして、各回路出力の安定する時間が経過した時点で、CPU20は、角速度の検出及び角速度の積分演算を行い、像振れ補正光学系の駆動目的先を演算し、次に像振れ補正光学系の位置検出を行うため、PSDからの電流を電流−電圧変換し、電圧増幅された出力をA/D変換し、像振れ補正光学系の位置を求める演算を行い、この処理を所定時間間隔で繰り返す。
図22は、像振れ補正光学系の位置出力波形図である。図23は、振れ検出回路の出力波形図である。この図22と図23は、このようなノイズ除去のサンプリングタイミングの制御を行わなかった場合の悪い例であり、図10のt4からt11のタイミングを抜粋した波形である。
この結果、振れ補正機構による像振れの補正制御を行っても、角速度の積分及び像振れ補正光学系の位置検出は正確に行われないため、像振れ補正光学系は像振れを抑えるどころか、場合によっては像振れ補正を行わない時よりも、かえって像振れを増やすこともある得る。
次に、図24は、本発明の第2の実施の形態の像振れ補正装置の構成ブロック図である。
カメラの半押しからレリーズまでの制御は第1の実施の形態と同じである。レリーズ釦の全押しがなされると、フォーカシングレンズの駆動からシャッター幕の開き動作までは、ステッピングモータの通電が数ミリ秒間隔で位相が変化しているため、スイッチングノイズの発生が頻繁である。
つまり、図25のt4からt9までは像振れ補正制御を中断し、t9から所定時間経過後、再び角速度検出及び像振れ補正制御を再開する。同様にt10からt13までの間もステッピングモータは動作するので、像振れ補正処理はt10で終了し、像振れ補正光学系は制御終了直前の位置へオープン制御駆動する。
次に、図26〜図28は、本発明の第3の実施の形態の像振れ補正装置の像振れ補正動作のタイムチャートである。
図26は、前述したDC/DCコンバータ64及びモータ類のスイッチングノイズと、角速度検出と、像振れ補正光学系の位置検出との周期を同一にした場合である。
ステッピングモータの通電周期に関しては、基本的にDC/DCコンバータ64の周波数に合わせるようにシャッターの開閉時の特性を設計すれば良い。但し、全く同じ周波数が困難であれば、DC/DCコンバータ64の周波数の分周した周波数に設定する。図27は、この場合の動作タイムチャートである。
また、図28に示すように、角速度検出処理を、像振れ補正光学系の位置検出処理の周波数に対し、DC/DCコンバータ64の発振周波数とステッピングモータの通電切り替え周期よりも早く実行する構成としている。この特徴は第1の実施の形態のようにノイズ発生によるデータを無効にする頻度を下げているので、データ抜けによる不均一性が改善される。
本第4実施の形態では、DC/DCコンバータ64の出力に大容量の電源バックアップ用のコンデンサ71、72を設けている。このコンデンサとしては、電気2重層コンデン
サなどが用いられる。図30は、このコンデンサの特性を利用した例を示す。
以上の説明から、請求項1乃至請求項5に記載の発明との対応関係は、次のようになっている。
像振れ補正駆動部(3)a、bには、アクチュエータ(61X、61Y)、アクチュエータ駆動回路(59X、59Y)及びタイマー回路20a、禁止回路20bを備えるCPU20の全体が対応する。
シャッター駆動部(6)には、アクチュエータ62とシャッター駆動回路60とCPU20との全体が対応する。振れ検出部(7)には、角速度検出回路(13、14)とCPU20の全体が対応する。
(2)位置検出部
(3)a、b像振れ補正駆動部
(4)電源回路
(5)合焦レンズ駆動部
(6)シャッター駆動部
(7)振れ検出部
1 像振れ補正光学系
2 レンズ鏡筒
3、3a、3b 可撓性支持部材
4 スリット板
5 PSD(位置検出素子)
6 駆動用コイル
7 マグネット
8 IRED(赤外線発光素子)
9、10 ヨーク
13、14 振れ検出素子
20 CPU
20a タイマー制御回路
20b 禁止回路
30 モータドライブ
49、50 ステッピングモータコイル
64 DC/DCコンバータ
Claims (5)
- 像振れ補正装置に与えられる振れを検出する振れ検出部と、
前記振れにより生じる像振れを補正する像振れ補正光学系と、
前記像振れ補正光学系の位置を検出する位置検出部と、
前記振れ検出部の出力信号及び前記位置検出部の出力信号のサンプリングに基づいて前記像振れ補正光学系を駆動する像振れ補正駆動部と、
シャッターの駆動を行うシャッター駆動部とを備える像振れ補正装置において、
前記シャッター駆動部は、前記シャッターを駆動する駆動用モータを有し、
前記像振れ補正駆動部は、前記シャッターを駆動する駆動用モータの駆動信号が切り替わるタイミングが含まれるように、前記振れ検出部の出力信号及び前記位置検出部の出力信号のサンプリングを所定時間禁止する禁止時間を設ける手段を備えることを特徴とする像振れ補正装置。 - 請求項1に記載の像振れ補正装置であって、前記駆動用モータはスッテッピングモータであることを特徴とする像振れ補正装置。
- 請求項1又は請求項2に記載の像振れ補正装置であって、
前記振れ検出部は、前記像振れ補正光学系の光軸に直交する方向の振れを検出することを特徴とする像振れ補正装置。 - 請求項1から請求項3の何れか1項に記載の像振れ補正装置を備えることを特徴とするカメラ。
- 像振れ補正光学系を用いて像振れ補正装置に与えられる振れを補正する像振れ補正方法において、
振れ検出部を用いて像振れ補正装置に与えられる振れを検出し、
前記振れ検出部の出力信号及び前記位置検出部の出力信号のサンプリングに基づいて、前記像振れ補正光学系を駆動して前記振れにより生じる像振れを補正し、
シャッターを駆動する駆動用モータを駆動制御するための駆動信号が切り替わるタイミングが含まれるように、前記振れ検出部の出力信号及び前記位置検出部の出力信号のサンプリングを所定時間禁止する禁止時間を設けることを特徴とする像振れ補正方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005296731A JP4029171B2 (ja) | 2005-10-11 | 2005-10-11 | 像振れ補正装置及びカメラ、像振れ補正方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005296731A JP4029171B2 (ja) | 2005-10-11 | 2005-10-11 | 像振れ補正装置及びカメラ、像振れ補正方法 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP23743395A Division JP3765113B2 (ja) | 1995-09-14 | 1995-09-14 | 像振れ補正装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2006048081A JP2006048081A (ja) | 2006-02-16 |
| JP2006048081A5 JP2006048081A5 (ja) | 2006-08-10 |
| JP4029171B2 true JP4029171B2 (ja) | 2008-01-09 |
Family
ID=36026604
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005296731A Expired - Lifetime JP4029171B2 (ja) | 2005-10-11 | 2005-10-11 | 像振れ補正装置及びカメラ、像振れ補正方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4029171B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2007136053A1 (ja) * | 2006-05-24 | 2007-11-29 | Nikon Corporation | ブレ補正装置、それを用いた光学機器、その製造方法及び操作方法 |
| US11487076B2 (en) | 2018-10-15 | 2022-11-01 | Asahi Kasei Microdevices Corporation | Lens drive device, lens drive method, and computer readable medium |
-
2005
- 2005-10-11 JP JP2005296731A patent/JP4029171B2/ja not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| JP2006048081A (ja) | 2006-02-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102196231B1 (ko) | 손떨림 보정 장치 및 그 조정 방법, 손떨림 보정 회로 및 손떨림 보정 방법과, 카메라 모듈 및 그 광학 요소의 위치 제어 방법 | |
| US7592759B2 (en) | Stepping motor servo driving method and driving mechanism | |
| US20100128133A1 (en) | Digital camera for coordinating focusing with compensation of camera shake | |
| JP2009098274A (ja) | 像ぶれ補正装置を有する光学機器 | |
| US9392161B2 (en) | Imaging apparatus | |
| JP5296346B2 (ja) | 撮影装置 | |
| JP2004354878A (ja) | 撮像装置 | |
| JP3765113B2 (ja) | 像振れ補正装置 | |
| JP4599820B2 (ja) | 像ブレ補正装置 | |
| JP4029171B2 (ja) | 像振れ補正装置及びカメラ、像振れ補正方法 | |
| JP2003098566A (ja) | 振動検出手段の信号制御装置 | |
| JP2006048082A (ja) | 像振れ補正装置 | |
| JP2013257486A (ja) | 光学装置、撮像装置、および光学装置の制御方法 | |
| KR20080066221A (ko) | 손떨림 보정 제어 방법 및 손떨림 보정 제어 장치 | |
| JP2010085473A (ja) | 撮像装置 | |
| JPH0980518A (ja) | ブレ補正カメラ | |
| JP2009047756A (ja) | 撮影装置 | |
| JP2015081950A (ja) | 撮像装置およびその制御方法 | |
| JP2004226692A (ja) | 振動検出装置及びブレ補正カメラ | |
| JPH0980566A (ja) | 像振れ補正装置 | |
| JP2021069174A (ja) | 制御装置および制御方法、撮像装置 | |
| JP2007127754A (ja) | 像振れ補正装置、光学装置、交換レンズ、及びカメラシステム | |
| JP2003057706A (ja) | 像振れ補正装置を有するカメラ | |
| JP4861928B2 (ja) | 撮影装置 | |
| JP2010230916A (ja) | ブレ補正装置および光学機器 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060623 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070313 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070514 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070612 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070809 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20070911 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20070924 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101026 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101026 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131026 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131026 Year of fee payment: 6 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131026 Year of fee payment: 6 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131026 Year of fee payment: 6 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| EXPY | Cancellation because of completion of term |