JP4019119B2 - パーキンソン症候群患者用歩行支援機 - Google Patents
パーキンソン症候群患者用歩行支援機 Download PDFInfo
- Publication number
- JP4019119B2 JP4019119B2 JP2001366849A JP2001366849A JP4019119B2 JP 4019119 B2 JP4019119 B2 JP 4019119B2 JP 2001366849 A JP2001366849 A JP 2001366849A JP 2001366849 A JP2001366849 A JP 2001366849A JP 4019119 B2 JP4019119 B2 JP 4019119B2
- Authority
- JP
- Japan
- Prior art keywords
- walking
- patient
- display device
- parkinson
- syndrome
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






Landscapes
- Rehabilitation Tools (AREA)
Description
【発明の属する技術分野】
本発明はパーキンソン症候群患者用歩行支援機及びパーキンソン症候群患者のリハビリテーション効果確認方法に関し、より詳しくは歩行機能障害をもつパーキンソン症候群患者がある程度自立して歩行リハビリテーションを行うことを可能とし、患者の歩行リハビリテーションの促進と医療者の身体的負担を軽減することができる歩行支援機およびリハビリの効果を容易に確認することができるリハビリテーション効果確認方法に関する。
【0002】
【従来の技術】
パーキンソン症候群とは、パーキソニズムと呼ばれる症候を有する疾患群の総称であり、突発性パーキソニズム、即ちパーキンソン病(脳が出す運動の指令がうまく伝わらず、スムーズに動けなくなる病気)と、疾候性パーキソニズム(パーキンソン病と非常によく似た症状であるが、その主な原因は脳梗塞、特に多発性脳梗塞であり、脳梗塞や多発性脳梗塞を発病することが多い高齢者によく見られる症状)を含む概念である。
このようなパーキンソン症候群においては、立位・歩行時の転倒頻度が高く、転倒を生じさせる要素としては、姿勢反射障害、加齢による体力の低下、運動緩慢および無動による歩行障害などが挙げられるが、なかでも歩行障害は重要であり、すくみ足現象、歩行開始困難、前方突進現象などが出現する。
【0003】
すくみ足現象とは、急に足が出なくなり、その場で足をガグガグさせてしばらく立ち止まってしまう現象であるが、この症例では、なんとか歩き出そうとあせれば焦るほど足が上がらず、上体は前のめりとなり、足は同じ場所で小刻みに動くのみで次の一歩が出ずに、ついには前方へ転倒することがある。
歩行開始困難とは、歩行開始時におけるすくみ足現象である。
前方突進現象とは、患者が前傾姿勢となり、一旦歩き出すと止まらなくなり、どんどん加速して前方へ突進してしまう現象であり、小股・すり足のつまずきやすい状態で加速し、突進してしまうので、転倒した場合、大変危険である。
また、この症候群患者には、小股・すり足で歩行する患者が多い。
【0004】
このように、パーキンソン症候群患者にとっては歩行機能の障害による転倒の危険性が非常に大きいため、医療機関においてはパーキンソン症候群患者の歩行リハビリテーションが行われている。
通常、このような歩行リハビリテーションは、理学療法士や看護婦等の医療者が患者に付き添って身体を支えることにより行われているが、このような従来の歩行リハビリテーションは、介助する医療者の身体的負担が非常に大きかった。
また、今後、高齢化社会が進行し、歩行リハビリテーションを必要とする患者が増加すれば、医療者の身体的負担が増加するばかりでなく、このような患者に必要とされる歩行リハビリテーションの時間が十分に取れなくなる可能性もある。
さらに、歩行リハビリテーションを繰り返し行っても、その効果が患者や医療者にはっきりと認識できない場合があり、患者や医療者のリハビリの意欲が削がれてしまうことがあった。また、効果がはっきりと認識できないことで、医療者が今後のリハビリの進め方の方針をたてにくいという問題もあった。
【0005】
【発明が解決しようとする課題】
本発明は上記従来の問題点に鑑みてなされたものであって、歩行機能に障害をもつパーキンソン症候群患者がある程度自立して歩行リハビリテーションを行うことが可能であって、患者の歩行リハビリテーションの促進と医療者の身体的負担を軽減することができる歩行支援機およびリハビリの効果を容易に且つはっきりと確認することができるリハビリテーション効果確認方法の提供を目的とするものである。
【0006】
【課題を解決するための手段】
請求項1に係る発明は、パーキンソン症候群患者の歩行訓練を行うための歩行支援機であって、パーキンソン症候群患者の歩行訓練を行う際の介助者の動きを記憶して、該記憶された動きを再現して歩行支援機を走行させる再現走行装置を具備し、該再現走行装置は、患者が介助者と共に歩行訓練を行った際の介助者の動きを撮影した画像を取り込んで記憶し、取り込まれた画像から介助者の動きを解析して、その解析結果に基づいて指令信号を送るコンピュータと、該コンピュータの指令信号に基づいて歩行支援機の車輪を回転させるサーボモータを駆動させる制御装置とからなることを特徴とするパーキンソン症候群患者用歩行支援機である。
請求項2に係る発明は、患者の歩行中の足裏にかかる圧力の位置を計測するために履物の表面に配置された足底圧計測センサーと、歩行訓練中の患者が肘を置く肘掛けの前方に設置された表示装置に該足底圧計測センサーにて計測された圧力分布を表示する足底圧計測表示装置を具備することを特徴とする請求項1記載のパーキンソン症候群患者用歩行支援機である。
請求項3に係る発明は、患者に応じて予め定められた一定速度で歩行支援機を走行させる速度制御装置を具備することを特徴とする請求項1記載のパーキンソン症候群患者用歩行支援機である。
請求項4に係る発明は、患者の歩行時における次の一歩の目標となる位置に目印となる光を照射する光照射装置を具備することを特徴とする請求項1記載のパーキンソン症候群患者用歩行支援機である。
請求項5に係る発明は、前記表示装置に一定時間間隔で画像を表示させる画像表示装置を具備することを特徴とする請求項2記載のパーキンソン症候群患者用歩行支援機である。
請求項6に係る発明は、患者の足位置を撮影するカメラと、該カメラにて撮影された患者の足位置の映像を次の一歩の目標となる足位置と共に表示する前記表示装置とからなる撮影足位置表示装置を具備することを特徴とする請求項2記載のパーキンソン症候群患者用歩行支援機である。
請求項7に係る発明は、患者の足の水平位置を検出する水平方向位置検出センサーと、該水平方向位置検出センサーにて検出された患者の足位置を、次の一歩の目標となる足位置と共に表示する前記表示装置とからなる検出足位置表示装置を具備することを特徴とする請求項2記載のパーキンソン症候群患者用歩行支援機である。
【0007】
請求項8に係る発明は、前記速度制御装置が、歩行時に患者が握ることができる左右一対のハンドルと、該ハンドルに加わる力を測定する力センサーと、該力センサーにて測定された力に基づいて指令信号を送るコンピュータと、該コンピュータの指令信号に基づいて歩行支援機の車輪を回転させるサーボモータを駆動させる制御装置とからなり、2つのハンドルに加わる力の合力が予め設定された力を超えた場合に、歩行支援機を一定の速度で走行させるように構成されてなることを特徴とする請求項3記載のパーキンソン症候群患者用歩行支援機である。
請求項9に係る発明は、前記撮影足位置表示装置において表示装置に表示される次の一歩の目標となる足位置が、前記光照射装置により表示された光であることを特徴とする請求項6記載のパーキンソン症候群患者用歩行支援機である。
請求項10に係る発明は、前記撮影足位置表示装置において表示装置に表示される次の一歩の目標となる足位置が、コンピュータグラフィックにて作成されたものであることを特徴とする請求項6記載のパーキンソン症候群患者用歩行支援機である。
【0009】
【発明の実施の形態】
以下、本発明に係るパーキンソン症候群患者用歩行支援機(以下、単に歩行支援機という)及びパーキンソン症候群患者のリハビリテーション効果確認方法の好適な実施形態について、図面を参照しつつ説明する。
図1は本発明に係る歩行支援機の一例を示す斜視図、図2はパーキンソン症候群患者(以下、単に患者という)が本発明に係る歩行支援機を使用している状態を示す図である。但し、図示された歩行支援機の構造・形状はあくまでも一例であって、本発明に係る歩行支援機の構造・形状が図示のものに限定される訳ではない。
【0010】
図示例に係る本発明に係る歩行支援機は、本体部1が、左右両側において前後方向に延びる底基部2と、この底基部2から一体に上向きに立設された左右2本の支持柱3と、これらの支持柱3の上端に水平向きに取り付けられた板状上基部4と、この板状上基部4と平行にその上部に取り付けられた平面視略コの字状の肘掛け5と、この肘掛け5の前部に取り付けられた左右一対のハンドル6と、底基部2の下部にそれぞれ左右一対ずつ取り付けられた前輪7及び後輪8と、底基部2の後部から後ろ向きに延出された左右一対のバー9とから構成されている。
【0011】
本体部1には後輪8を駆動させるための駆動装置10が設けられており、この駆動装置10は後輪8の回転動作を制御するためのパルスエンコーダ付きサーボモータを備えている。尚、サーボモータ及び後輪はケーシング内に収容されて外部から直接見えないようになっている。
サーボモータは、本体部1の前部に設けられた制御装置(サーボドライバ)11によって制御され、制御装置11への指令信号はCPUやメモリ等を備えたコンピュータ(図示せず)からDA変換ボード、DOボード、パルス制御ボードを介して送られる。また、サーボモータの回転角度はパルスエンコーダにより計測され、パルス制御ボードを介して前記コンピュータへ取り込まれる。これらの構成は、後述する歩行支援機を一定の速度で走行させる速度制御装置と合わせて本発明におけるパルスエンコーダ付き制御装置を構成する。
尚、本発明において使用されるコンピュータは、本体部1とは別に設置されたパーソナルコンピュータ等であってもよいが、本体部1に搭載した小型のマイコンや小型のパーソナルコンピュータであってもよい。
【0012】
上記コンピュータは、患者が介助者(理学療法士や看護婦等の医療者)と共に歩行訓練を行った際の介助者の動き、具体的には歩行開始時に患者を一旦軽く揺らした後に前へと引っ張る動きを撮影した画像を取り込んで記憶し、取り込まれた画像から介助者の動きを解析して、その解析結果に基づいて制御装置11へと指令信号を送ることができる。
制御装置11は受信した指令信号に基づいてサーボモータを駆動して後輪8を回転させ、これによって歩行支援機は上記した介助者の動きを再現した走行を行うことが可能となる。
これは、本発明に係る歩行支援機が具備することができる装置のうちの再現走行装置に相当する構成であって、この再現走行装置は、パーキンソン症候群患者の歩行機能障害のうち、歩行開始困難に対する対策として特に有効である。
すなわち、歩行支援機が介助者の動きを再現した走行を行うことで、患者は介助者によって導かれるのと同様に歩行支援機に導かれることとなり、歩行開始困難の症状を有する患者が第一歩を出しやすくすることが可能となる。
【0013】
また、左右一対のハンドル6の根元には、それぞれ力センサーが取り付けられており、この力センサーにより患者がハンドル6に加える力(押す力、引く力など)が測定され、測定により得られた情報はAD変換ボードを介して前記コンピュータへと送られる。
コンピュータは、力センサーからの情報に基いて制御装置11へと指令信号を発信し、サーボモータを駆動して後輪8を回転させて歩行支援機の走行を制御する。
【0014】
この制御は、2つのハンドル6に加わる力の合力が、予め設定された前進方向のある力Faを超える場合、歩行支援機を前進方向へ一定の速度Va(例えば、0.07m/s程度)で走行させ、予め設定された後方向のある力Fb以上の力が加わると、歩行支援機を後方へ一定速度Vb(例えば、0.07m/s程度)で走行させるものである。尚、この一定速度は、患者の体型や症状、症状の回復具合等に応じて設定される。
これは、本発明に係る歩行支援機が具備することができる装置のうちの速度制御装置に相当する構成であって、この速度制御装置は、パーキンソン症候群患者の歩行機能障害のうち、前方突進現象に対する対策として特に有効である。
すなわち、患者が歩行支援機に対して強い力を加えても、歩行支援機が常に一定速度で走行するように制御されることによって、患者が自分の意思とは無関係に前方に突進していく現象をくい止めることが可能となる。
【0015】
板状上基部4には、光照射装置12が下向きに取り付けられており、この光照射装置12によって歩行訓練中の患者の足元に線状の光を表示させることができるようになっている。
この線状の光は、患者の歩行時における次の一歩の目標位置を示す目印となるものであって、患者の足元前方に1本の線として若しくは患者の正常な歩幅間隔に合わせた間隔で複数本の線として床面上に表示される。
また、光照射装置12を一定時間間隔で点滅させるようにしてもよく、この場合にも複数本の線を点滅表示させてもよいが、患者の一歩前の位置のみに1本だけ線を点滅表示させてもよい。
また、光照射装置12によって患者の足元に表示される光の形状は、必ずしも線状に限られるものではなく、患者が歩行する際の次の一歩の目印になるものであれば、足形や円形等の他の形状であってもよい。
【0016】
このような光照射装置12を用いた構成は、視覚刺激下での逆説動作を利用したものであり、パーキンソン症候群患者の歩行機能障害のうち、すくみ足現象に対する対策として特に有効である。
逆説動作とは、パーキソニズムの経過中、著しい無動状態が存在しても、非常事態などの特殊な状況下又はある種の刺激下で、突然無動状態から脱して正常に近い動作が可能となるというものであり、例えばすくみ足状態の患者の足元の床面上に一定間隔で線を引いておくと、それによってスムーズに歩き始めることが知られている。
しかしながら、リハビリテーション室以外の場所では床面上に線を引くことができないため、廊下や屋外などでは患者は一旦立ち止まると次の一歩を出すことが難しくなり、その場で立ちすくんでしまうこととなる。
本発明の光照射装置を利用した上記構成によれば、床面上に実際に線を引くことなく、患者に次の一歩の目標(目印)となる線や足形を光で示すことが可能となり、患者はどのような場所でも光照射装置により照射される光を目印として、次の一歩が出しやすくなる。
【0017】
また、本発明においては、上記光照射装置に代えて或いは加えて、患者が歩行リズムをとるための音を発生する音発生装置(図示せず)を設けることも可能である。音発生装置から発生される音は、例えばカチ、カチというメトロノームのような音であってもよいし、一、二、一、二といったような掛け声であってもよく、特に限定はされない。
音発生装置を設けると、すくみ足状態の患者は聴覚に刺激が与えられることで、音に合わせてスムーズな歩行をし易くなる。
さらに、本発明においては、上記光照射装置及び音発生装置に代えて或いは加えて、患者の目の前に設けられた後記する表示装置13に、一定時間間隔で画像を表示させる画像表示装置を設けることも可能である。
この画像表示装置により表示される画像は、例えば上記したコンピュータによって作成されたコンピュータグラフィックとすることができる。
表示される画像の種類は特に限定されるものではないが、例えば図8に符号K2で示したような左右の足形を好適な例として挙げることが可能であり、この場合には、左右の足形画像を一定時間間隔で交互に表示させればよい。
このような画像表示装置を設けると、すくみ足状態の患者は視覚に刺激が与えられることによって、画像が表示される時間間隔に合わせて左右の足を交互に出してスムーズな歩行をし易くなる。
【0018】
肘掛け5の前方には表示装置13が設置されており、これにより歩行訓練中の患者は歩行しながらこの表示装置13を見ることができるようになっている。
また、肘掛け5の後部中央には、ビデオカメラ14が下向きに取り付けられて、歩行訓練中の患者の足位置を撮影することができるようになっており、ビデオカメラ14にて撮影された患者の足位置の画像は表示装置13に表示される。
このとき、カメラにて撮影された患者自身の足位置の映像と共に、次の一歩の目標となる足位置が表示装置13に表示される。
これは、本発明に係る歩行支援機が具備することができる装置のうちの撮影足位置表示装置に相当する構成であって、この撮影足位置表示装置は、パーキンソン症候群患者の歩行機能障害のうち、歩行開始困難、すくみ足現象に対する対策として特に有効である。
すなわち、患者は表示装置13にて、自分の足位置と共に次の一歩の目標となる足位置を認知することができるので、目標の足位置まで自分の足を出して歩行することが可能となる。
【0019】
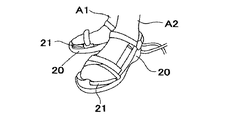
上記した撮影足位置表示装置において表示装置に表示される次の一歩の目標となる足位置は、前述した光照射装置12により患者の足元に表示された目印となる光(例えば、線状の光)をカメラ14にて撮影したものであってもよいし、コンピュータグラフィックにて作成されたものであってもよい。図3は、表示装置13に、患者の足A1、A2と光照射装置12により患者の足元に表示された線状の光Hをカメラ14にて撮影したものを表示した様子を示している。
【0020】
左右一対のバー9には、内向きで後側に向けて所定間隔毎に、患者の足の水平方向の位置を検出する赤外線センサーからなる水平方向位置検出センサー15が取り付けられている。
この水平方向位置検出センサー15は、図4に示すように、該センサーから発せられた赤外線Sに患者Kの左右の足A1,A2が当たることによって、これらの足A1,A2の水平方向の位置を検出するものであり、測定された患者の足の水平位置情報はDIボードを介して前記コンピュータへと送られて、コンピュータグラフィックにより表示装置13にリアルタイムで表示される。
【0021】
このとき、水平方向位置検出センサー15にて検出された患者自身の足位置と共に、次の一歩の目標となる足位置がコンピュータグラフィックにより表示装置13に表示される。
これは、本発明に係る歩行支援機が具備することができる装置のうちの検出足位置表示装置に相当する構成であって、この検出足位置表示装置も、パーキンソン症候群患者の歩行機能障害のうち、歩行開始困難、すくみ足現象に対する対策として特に有効である。
すなわち、患者は表示装置13にて、自分の足位置と共に次の一歩の目標となる足位置を認知することができるので、目標の足位置まで自分の足を出して歩行することが可能となる。
【0022】
このように、検出足位置表示装置は前記した撮影足位置表示装置と同様の作用効果を奏するものであるが、検出足位置表示装置によればカメラ14が不要となるため、装置が低コストとなるという長所がある。一方、撮影足位置表示装置によれば、装置コストは高くなるが、実際の患者の足を撮影して表示させることによって、より正確な足位置が分かるとともに、コンピュータグラフィックに比べてリアリティがあるという長所がある。
【0023】
患者の履物20には、患者の歩行中の足裏にかかる圧力の位置を計測するための足底圧計測センサー16が配設される。
図5は足底圧計測センサー16を取り付けた下敷きシートを表面に敷いた履物を足に付けた状態を示す斜視図、図6は足底圧計測センサー16を取り付けた下敷きシートを表面に敷いた履物の斜視図である。
足底圧計測センサー16の配設位置は、図7に示すように、履物20の表面に敷かれる下敷きシート21の裏面側における踵部K、ショパール関節部P、MP関節部MP、外側部Q、母指部ML、小指部Uの6部分とされている。
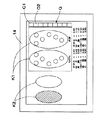
そして、これら各部分の足底圧計測センサー16によって測定された足底圧情報は、前記したコンピュータに送られて、図8に示すように、リアルタイムで表示装置13に表示される。
【0024】
図8において、表示装置13の画面右端には棒グラフGが表示されており、この棒グラフGでは、圧力の大きさに応じて異なる色C1,C2・・・が示されている。また、グラフGの左側には左右の足型K1とともに、足底圧計測センサー16の配置されたそれぞれの位置について、測定された足底圧がグラフGの色分けに応じた色で示されるようになっており、これにより、患者や医療者は、表示装置13の画面に示された足形の各部分の色を見ることで、どの部分に圧力が加わっているかを一目で把握することができる。尚、画面の左端には、圧力が加わっている側が点灯する足型K2が表示されており、現在左右どちらの足に圧力が加わっているかを把握することができるようになっている。また、両足に圧力が加わっていれば両足の足形が表示される。したがって、患者がすり足で歩行している場合、両足が常に点灯することになるので、患者や医療者はすり足になっていないかどうかを容易に認識することができる。
【0025】
これは、本発明に係る歩行支援機が具備することができる装置のうちの足底圧計測表示装置に相当する構成であって、医療者が患者の体重移動の仕方(特にパーキンソン症候群患者の歩行の特徴であるすり足になっていないか等)をリアルタイムに認識して指導することが可能となる。
【0026】
本発明に係る歩行支援機には、上記した各装置を駆動させるための電源となるバッテリーを搭載させることが好ましい。
また、本発明に係る歩行支援機においては、上記した各装置のうちのいずれか一つを具備していればよいが、2つ以上を組み合わせて具備することも可能である。歩行支援機にどの装置を具備させるかは患者の症状に応じて決定すればよく、患者の症状に応じて歩行支援機に具備される装置の一例を以下に示す。
【0027】
視覚刺激のみで歩けるようになる患者の場合、1)光照射装置を具備させる、2)画像表示装置を具備させる、3)検出足位置表示装置を具備させる、4)撮影足位置表示装置を具備させる、5)光照射装置と撮影足位置表示装置を組み合わせて具備させる、等のパターンが考えられる。
音刺激のみで歩けるようになる患者の場合、音発生装置を具備させればよい。
前方突進現象がある患者の場合、速度制御装置を具備させればよい。
歩行開始時に、一旦後ろへ軽く揺らした後、前へ引っ張るという介助動作が必要な患者の場合、再現走行装置を具備させればよい。
歩行リハビリ中に足底圧の情報がリアルタイムに必要な患者の場合、足底圧計測表示装置を具備させればよい。
但し、これらはあくまでも一例であって、装置の異なる組み合わせを採用することも勿論可能である。
【0028】
また、本発明において、歩行支援機に前記検出足位置表示装置又は足底圧計測表示装置又はパルスエンコーダ付き制御装置のいずれかが具備されている場合には、これらの装置に備えられた水平方向位置検出センサー又は足底圧計測センサー又はパルスエンコーダにて測定されたデータを記憶手段に記憶させて保存することが好ましい。
記憶手段としては、歩行支援機に搭載されたコンピュータのメモリを使用してもよいし、外部のコンピュータのメモリを使用してもよい。
そして、患者が歩行支援機を使用して行う歩行訓練リハビリテーションの際に、水平方向位置検出センサー又は足底圧計測センサー又はパルスエンコーダにて測定されたデータを記憶手段に記憶させて保存しておき、患者がリハビリをはじめてから1週間後、2週間後、1ヶ月後、・・・というような経時的なデータを患者と医療者が見ることにより、リハビリの効果を確かめることが可能となる。具体的には、水平方向位置検出センサーによって測定されたデータ(患者の足の水平位置情報)から、患者の歩幅がリハビリ前に比べて広がっていることを確かめることができ、また足底圧計測センサーによって測定されたデータ(患者の足底圧情報)から、すくみ足がなくなり、すり足もなくなっていることを確かめることができる。また、パルスエンコーダによって計測されたデータ(サーボモータの回転角度)から、歩行支援機の走行距離および走行速度がわかり、リハビリ前に比べて歩行距離が広がっていることおよび歩行速度が健常者の速度に近づいてきたことが確認できる。
【0029】
以上説明したように、請求項1に係る発明によれば、再現走行装置を具備することによって、患者は介助者によって導かれるのと同様に歩行支援機に導かれることとなり、歩行開始困難のすくみ足現象を生じることなく、連続的に安定して歩行することが可能となる。また、患者が介助者と共に歩行訓練を行った際の介助者の動きを撮影した画像を取り込んで記憶して、これに基づいて歩行支援機の車輪の駆動を制御するので、患者が介助者と共に歩行訓練を行った際の介助者の動きを確実に再現して歩行支援機を走行させることが可能となる。
【0030】
請求項2に係る発明によれば、足底圧計測表示装置を具備することによって、医療者が患者の体重移動の仕方をリアルタイムに認識して指導することが可能となる。
請求項3に係る発明によれば、速度制御装置を具備することによって、歩行支援機が常に一定速度で走行するように制御されて、患者が自分の意思とは無関係に前方に突進していく現象をくい止めることが可能となる。
請求項4及び5に係る発明によれば、光照射装置又は画像表示装置を具備することによって、患者に視覚刺激を与えることができ、逆説動作を利用してどのような場所でも立ちすくむことなく歩行を続けることができる。
請求項6及び7に係る発明によれば、撮影足位置表示装置や検出足位置表示装置を具備することによって、患者は表示装置にて、自分の足位置と共に次の一歩の目標となる足位置を認知することができるようになり、目標の足位置まで自分の足を出して歩行することが可能となる。
【0031】
請求項8に係る発明によれば、ハンドルに大きな力が加わった場合でも、歩行支援機を一定速度で走行させることができ、患者の前方突進現象を確実にくい止めることが可能となる。
請求項9に係る発明によれば、表示装置に表示される次の一歩の目標となる足位置が、前記光照射装置により表示された光であるので、患者が目標を認識して歩行することができる。
請求項10に係る発明によれば、表示装置に表示される次の一歩の目標となる足位置が、コンピュータグラフィックにて作成されたものであるので、光照射装置を設けることなく、患者に対して目標を示すことができる。
【図面の簡単な説明】
【図1】本発明に係る歩行支援機の一例を示す斜視図である。
【図2】パーキンソン症候群患者が本発明に係る歩行支援機を使用している状態を示す図である。
【図3】撮影足位置表示装置において、表示装置に表示された患者の足と光照射装置により患者の足元に表示された目印となる光(線状の光)を示す図である。
【図4】水平方向位置検出センサーによる患者の足の水平方向の位置検出方法を示す図である。
【図5】足底圧計測センサーを取り付けた下敷きシートを表面に敷いた履物を足に付けた状態を示す斜視図である。
【図6】足底圧計測センサーを取り付けた下敷きシートを表面に敷いた履物の斜視図である。
【図7】足底圧計測センサーの配設位置を示す図である。
【図8】足底圧計測センサーによって測定された足底圧情報を表示装置の画面上に表示した様子を示す図である。
【符号の説明】
1 本体部
6 ハンドル
7 前輪
8 後輪
9 バー
10 駆動装置
11 制御装置
12 光照射装置
13 表示装置
14 カメラ
15 水平方向位置検出センサー
16 足底圧計測センサー
20 履物
A1、A2 患者の左右の足
H 線状の光(目印となる光)
S 赤外線
Claims (10)
- パーキンソン症候群患者の歩行訓練を行うための歩行支援機であって、
パーキンソン症候群患者の歩行訓練を行う際の介助者の動きを記憶して、該記憶された動きを再現して歩行支援機を走行させる再現走行装置を具備し、
該再現走行装置は、患者が介助者と共に歩行訓練を行った際の介助者の動きを撮影した画像を取り込んで記憶し、取り込まれた画像から介助者の動きを解析して、その解析結果に基づいて指令信号を送るコンピュータと、該コンピュータの指令信号に基づいて歩行支援機の車輪を回転させるサーボモータを駆動させる制御装置とからなることを特徴とするパーキンソン症候群患者用歩行支援機。 - 患者の歩行中の足裏にかかる圧力の位置を計測するために履物の表面に配置された足底圧計測センサーと、歩行訓練中の患者が肘を置く肘掛けの前方に設置された表示装置に該足底圧計測センサーにて計測された圧力分布を表示する足底圧計測表示装置を具備することを特徴とする請求項1記載のパーキンソン症候群患者用歩行支援機。
- 患者に応じて予め定められた一定速度で歩行支援機を走行させる速度制御装置を具備することを特徴とする請求項1記載のパーキンソン症候群患者用歩行支援機。
- 患者の歩行時における次の一歩の目標となる位置に目印となる光を照射する光照射装置を具備することを特徴とする請求項1記載のパーキンソン症候群患者用歩行支援機。
- 前記表示装置に一定時間間隔で画像を表示させる画像表示装置を具備することを特徴とする請求項2記載のパーキンソン症候群患者用歩行支援機。
- 患者の足位置を撮影するカメラと、該カメラにて撮影された患者の足位置の映像を次の一歩の目標となる足位置と共に表示する前記表示装置とからなる撮影足位置表示装置を具備することを特徴とする請求項2記載のパーキンソン症候群患者用歩行支援機。
- 患者の足の水平位置を検出する水平方向位置検出センサーと、該水平方向位置検出センサーにて検出された患者の足位置を、次の一歩の目標となる足位置と共に表示する前記表示装置とからなる検出足位置表示装置を具備することを特徴とする請求項2記載のパーキンソン症候群患者用歩行支援機。
- 前記速度制御装置が、歩行時に患者が握ることができる左右一対のハンドルと、該ハンドルに加わる力を測定する力センサーと、該力センサーにて測定された力に基づいて指令信号を送るコンピュータと、該コンピュータの指令信号に基づいて歩行支援機の車輪を回転させるサーボモータを駆動させる制御装置とからなり、2つのハンドルに加わる力の合力が予め設定された力を超えた場合に、歩行支援機を一定の速度で走行させるように構成されてなることを特徴とする請求項3記載のパーキンソン症候群患者用歩行支援機。
- 前記撮影足位置表示装置において表示装置に表示される次の一歩の目標となる足位置が、前記光照射装置により表示された光であることを特徴とする請求項6記載のパーキンソン症候群患者用歩行支援機。
- 前記撮影足位置表示装置において表示装置に表示される次の一歩の目標となる足位置が、コンピュータグラフィックにて作成されたものであることを特徴とする請求項6記載のパーキンソン症候群患者用歩行支援機。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2001366849A JP4019119B2 (ja) | 2001-11-30 | 2001-11-30 | パーキンソン症候群患者用歩行支援機 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2001366849A JP4019119B2 (ja) | 2001-11-30 | 2001-11-30 | パーキンソン症候群患者用歩行支援機 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2003164544A JP2003164544A (ja) | 2003-06-10 |
| JP4019119B2 true JP4019119B2 (ja) | 2007-12-12 |
Family
ID=19176687
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2001366849A Expired - Fee Related JP4019119B2 (ja) | 2001-11-30 | 2001-11-30 | パーキンソン症候群患者用歩行支援機 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4019119B2 (ja) |
Families Citing this family (31)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005034568A (ja) * | 2003-07-14 | 2005-02-10 | Masahito Okada | すくみ足用「始めの一歩」杖 |
| CA2555231A1 (en) | 2004-02-05 | 2005-08-18 | Motorika Inc. | Methods and apparatuses for rehabilitation exercise and training |
| WO2005087307A2 (en) | 2004-02-05 | 2005-09-22 | Motorika Inc. | Neuromuscular stimulation |
| WO2005074373A2 (en) | 2004-02-05 | 2005-08-18 | Motorika Inc. | Methods and apparatus for rehabilitation and training |
| KR20070061475A (ko) | 2004-02-05 | 2007-06-13 | 모토리카 리미티드 | 보행 재활을 위한 방법 및 장치 |
| US20080139975A1 (en) * | 2004-02-05 | 2008-06-12 | Motorika, Inc. | Rehabilitation With Music |
| WO2006021952A2 (en) | 2004-08-25 | 2006-03-02 | Reability Inc. | Motor training with brain plasticity |
| US20060293617A1 (en) | 2004-02-05 | 2006-12-28 | Reability Inc. | Methods and apparatuses for rehabilitation and training |
| US8112155B2 (en) | 2004-02-05 | 2012-02-07 | Motorika Limited | Neuromuscular stimulation |
| JP4581087B2 (ja) * | 2005-01-31 | 2010-11-17 | 国立大学法人九州工業大学 | 歩行訓練支援装置 |
| NL1035236C2 (nl) * | 2008-03-31 | 2009-10-01 | Forcelink B V | Inrichting en werkwijze voor het aanbieden van doelindicaties voor voetplaatsing aan personen met een loopstoornis. |
| JP5251270B2 (ja) * | 2008-06-04 | 2013-07-31 | 三菱化学株式会社 | パーキンソン病の評価装置 |
| JP2010069227A (ja) * | 2008-09-22 | 2010-04-02 | Nitta Ind Corp | 運動支援装置 |
| JP5633779B2 (ja) * | 2010-04-30 | 2014-12-03 | 国立大学法人九州工業大学 | 自立式の歩行支援装置 |
| ES2397162B1 (es) * | 2011-04-18 | 2014-01-27 | Joaquín DE LARRETA-AZELAIN OLIVERAS | Dispositivo para el mantenimiento y recuperación de capacidades físicas y congitivas en pacientes |
| US10552669B2 (en) | 2011-09-20 | 2020-02-04 | Fraunhofer-Gesellschaft Zur Fòrderung Der Angewandten Forschung E.V. | System and method for supporting an exercise movement |
| KR101424109B1 (ko) | 2013-04-04 | 2014-08-01 | 주식회사 아이런 | 보행 보조장치 |
| JP6260811B2 (ja) * | 2013-11-22 | 2018-01-17 | 株式会社テック技販 | リハビリ支援装置 |
| JP5901083B2 (ja) * | 2014-09-30 | 2016-04-06 | 国立大学法人九州工業大学 | 自立式の歩行支援装置 |
| JP6487189B2 (ja) * | 2014-11-04 | 2019-03-20 | 正勝 伊藤 | 脊柱の運動器具 |
| KR101647629B1 (ko) * | 2015-04-29 | 2016-08-11 | 김원희 | 보행 보조 장비 |
| JP6406187B2 (ja) * | 2015-09-08 | 2018-10-17 | トヨタ自動車株式会社 | 歩行訓練装置、及びその作動方法 |
| KR101764061B1 (ko) * | 2016-07-15 | 2017-08-02 | 건양대학교산학협력단 | 증강현실 기반의 보행훈련 시스템 |
| JP6827348B2 (ja) * | 2017-03-22 | 2021-02-10 | 本田技研工業株式会社 | 歩行支援システム、歩行支援方法、及びプログラム |
| JP6882916B2 (ja) | 2017-03-29 | 2021-06-02 | 本田技研工業株式会社 | 歩行支援システム、歩行支援方法、および歩行支援プログラム |
| JP6383965B1 (ja) * | 2017-12-07 | 2018-09-05 | 幹夫 福永 | 治療用椅子 |
| JP6891803B2 (ja) * | 2017-12-27 | 2021-06-18 | トヨタ自動車株式会社 | 歩行補助装置 |
| JP7017454B2 (ja) * | 2018-03-30 | 2022-02-08 | トヨタ自動車株式会社 | 歩行訓練装置、その制御方法及びプログラム |
| JP6536922B2 (ja) * | 2018-07-11 | 2019-07-03 | 幹夫 福永 | 治療用椅子 |
| JP6600776B2 (ja) * | 2018-07-25 | 2019-11-06 | 幹夫 福永 | 治療用椅子 |
| JP7278531B1 (ja) * | 2022-10-25 | 2023-05-22 | 康幸 菅野 | 認知機能強化型トレッドミル |
-
2001
- 2001-11-30 JP JP2001366849A patent/JP4019119B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2003164544A (ja) | 2003-06-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4019119B2 (ja) | パーキンソン症候群患者用歩行支援機 | |
| US8888723B2 (en) | Gait rehabilitation methods and apparatuses | |
| US10733866B2 (en) | Walker-assist device | |
| JP5117726B2 (ja) | リハビリテーション並びにトレーニングのための方法及び器械 | |
| KR100976180B1 (ko) | 보행훈련용 로봇 및 그 운용방법 | |
| JP6501368B2 (ja) | コンピューター支援式理学療法用階段および歩行システム | |
| JP5633779B2 (ja) | 自立式の歩行支援装置 | |
| JP2001299842A (ja) | 脚の長さや歩幅に基づく使用者独自の歩行サイクルに適合し得るよう歩行練習装置の周回ベルトの速度調節を行う患者リハビリテーション補助器具 | |
| KR20190029175A (ko) | 재활훈련시스템 및 그것을 이용한 재활훈련방법 | |
| KR101433284B1 (ko) | 자세조절부를 포함하는 자세균형 훈련용 보행보조기 | |
| JP2003047635A (ja) | 歩行訓練機 | |
| KR100854511B1 (ko) | 보행훈련제어시스템 | |
| CN102217938A (zh) | 人体平衡运动功能的评估仪 | |
| JP6218307B2 (ja) | 起立動作誘導システム | |
| TW201233382A (en) | Exercise training system with physiological signal measurement and oxygen concentration compensation | |
| TWI551284B (zh) | Gait training tools | |
| JP2002263152A (ja) | 歩行器 | |
| WO2020170001A1 (en) | Device and method for patient exercising in aquatic conditions | |
| Dune et al. | Can smart rollators be used for gait monitoring and fall prevention? | |
| KR101675510B1 (ko) | 능동형 운동치료장치 | |
| KR102870039B1 (ko) | 보행분석 트레드밀 | |
| JP6777943B2 (ja) | 歩行訓練装置 | |
| JP2001276155A (ja) | 歩行器 | |
| KR102740347B1 (ko) | 전정재활 훈련장치 | |
| JP2003319983A (ja) | 立位練習器 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20041007 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20041209 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070323 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070517 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070530 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070709 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070710 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20070723 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20070820 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070920 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101005 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| AA91 | Notification of revocation by ex officio |
Free format text: JAPANESE INTERMEDIATE CODE: A971091 Effective date: 20071120 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101005 Year of fee payment: 3 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101005 Year of fee payment: 3 |
|
| R371 | Transfer withdrawn |
Free format text: JAPANESE INTERMEDIATE CODE: R371 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101005 Year of fee payment: 3 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101005 Year of fee payment: 3 |
|
| R371 | Transfer withdrawn |
Free format text: JAPANESE INTERMEDIATE CODE: R371 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101005 Year of fee payment: 3 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101005 Year of fee payment: 3 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101005 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111005 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111005 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121005 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121005 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131005 Year of fee payment: 6 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |