JP3965198B1 - GAME PROGRAM, GAME DEVICE, AND GAME CONTROL METHOD - Google Patents
GAME PROGRAM, GAME DEVICE, AND GAME CONTROL METHOD Download PDFInfo
- Publication number
- JP3965198B1 JP3965198B1 JP2006073384A JP2006073384A JP3965198B1 JP 3965198 B1 JP3965198 B1 JP 3965198B1 JP 2006073384 A JP2006073384 A JP 2006073384A JP 2006073384 A JP2006073384 A JP 2006073384A JP 3965198 B1 JP3965198 B1 JP 3965198B1
- Authority
- JP
- Japan
- Prior art keywords
- trajectory
- passing
- expected
- moving body
- recognizing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 50
- PWPJGUXAGUPAHP-UHFFFAOYSA-N lufenuron Chemical compound C1=C(Cl)C(OC(F)(F)C(C(F)(F)F)F)=CC(Cl)=C1NC(=O)NC(=O)C1=C(F)C=CC=C1F PWPJGUXAGUPAHP-UHFFFAOYSA-N 0.000 title 1
- 238000004364 calculation method Methods 0.000 claims description 61
- 230000005484 gravity Effects 0.000 claims description 13
- 230000006870 function Effects 0.000 description 81
- 101100278659 Caenorhabditis elegans dyb-1 gene Proteins 0.000 description 13
- NAWDYIZEMPQZHO-UHFFFAOYSA-N ytterbium Chemical compound [Yb] NAWDYIZEMPQZHO-UHFFFAOYSA-N 0.000 description 11
- 238000006243 chemical reaction Methods 0.000 description 5
- 238000010586 diagram Methods 0.000 description 3
- 230000005236 sound signal Effects 0.000 description 3
- 230000007935 neutral effect Effects 0.000 description 2
- 238000003672 processing method Methods 0.000 description 2
- 230000003044 adaptive effect Effects 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 235000015096 spirit Nutrition 0.000 description 1
Images














Classifications
-
- A63F13/10—
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63F—CARD, BOARD, OR ROULETTE GAMES; INDOOR GAMES USING SMALL MOVING PLAYING BODIES; VIDEO GAMES; GAMES NOT OTHERWISE PROVIDED FOR
- A63F13/00—Video games, i.e. games using an electronically generated display having two or more dimensions
- A63F13/55—Controlling game characters or game objects based on the game progress
- A63F13/57—Simulating properties, behaviour or motion of objects in the game world, e.g. computing tyre load in a car race game
- A63F13/573—Simulating properties, behaviour or motion of objects in the game world, e.g. computing tyre load in a car race game using trajectories of game objects, e.g. of a golf ball according to the point of impact
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63F—CARD, BOARD, OR ROULETTE GAMES; INDOOR GAMES USING SMALL MOVING PLAYING BODIES; VIDEO GAMES; GAMES NOT OTHERWISE PROVIDED FOR
- A63F13/00—Video games, i.e. games using an electronically generated display having two or more dimensions
- A63F13/45—Controlling the progress of the video game
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63F—CARD, BOARD, OR ROULETTE GAMES; INDOOR GAMES USING SMALL MOVING PLAYING BODIES; VIDEO GAMES; GAMES NOT OTHERWISE PROVIDED FOR
- A63F13/00—Video games, i.e. games using an electronically generated display having two or more dimensions
- A63F13/50—Controlling the output signals based on the game progress
- A63F13/53—Controlling the output signals based on the game progress involving additional visual information provided to the game scene, e.g. by overlay to simulate a head-up display [HUD] or displaying a laser sight in a shooting game
- A63F13/537—Controlling the output signals based on the game progress involving additional visual information provided to the game scene, e.g. by overlay to simulate a head-up display [HUD] or displaying a laser sight in a shooting game using indicators, e.g. showing the condition of a game character on screen
- A63F13/5375—Controlling the output signals based on the game progress involving additional visual information provided to the game scene, e.g. by overlay to simulate a head-up display [HUD] or displaying a laser sight in a shooting game using indicators, e.g. showing the condition of a game character on screen for graphically or textually suggesting an action, e.g. by displaying an arrow indicating a turn in a driving game
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63F—CARD, BOARD, OR ROULETTE GAMES; INDOOR GAMES USING SMALL MOVING PLAYING BODIES; VIDEO GAMES; GAMES NOT OTHERWISE PROVIDED FOR
- A63F13/00—Video games, i.e. games using an electronically generated display having two or more dimensions
- A63F13/80—Special adaptations for executing a specific game genre or game mode
- A63F13/812—Ball games, e.g. soccer or baseball
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63F—CARD, BOARD, OR ROULETTE GAMES; INDOOR GAMES USING SMALL MOVING PLAYING BODIES; VIDEO GAMES; GAMES NOT OTHERWISE PROVIDED FOR
- A63F2300/00—Features of games using an electronically generated display having two or more dimensions, e.g. on a television screen, showing representations related to the game
- A63F2300/60—Methods for processing data by generating or executing the game program
- A63F2300/64—Methods for processing data by generating or executing the game program for computing dynamical parameters of game objects, e.g. motion determination or computation of frictional forces for a virtual car
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63F—CARD, BOARD, OR ROULETTE GAMES; INDOOR GAMES USING SMALL MOVING PLAYING BODIES; VIDEO GAMES; GAMES NOT OTHERWISE PROVIDED FOR
- A63F2300/00—Features of games using an electronically generated display having two or more dimensions, e.g. on a television screen, showing representations related to the game
- A63F2300/60—Methods for processing data by generating or executing the game program
- A63F2300/69—Involving elements of the real world in the game world, e.g. measurement in live races, real video
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63F—CARD, BOARD, OR ROULETTE GAMES; INDOOR GAMES USING SMALL MOVING PLAYING BODIES; VIDEO GAMES; GAMES NOT OTHERWISE PROVIDED FOR
- A63F2300/00—Features of games using an electronically generated display having two or more dimensions, e.g. on a television screen, showing representations related to the game
- A63F2300/80—Features of games using an electronically generated display having two or more dimensions, e.g. on a television screen, showing representations related to the game specially adapted for executing a specific type of game
- A63F2300/8011—Ball
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Theoretical Computer Science (AREA)
- Human Computer Interaction (AREA)
- Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Processing Or Creating Images (AREA)
Abstract
【課題】キャラクタから送出された移動体の威力状態を、移動体の到達位置に応じて変更することができるようにする。
【解決手段】本ゲームプログラムでは、ボールのリリース位置Boおよび目標通過位置Moに基づいてボールの第1軌道K11が算出される。そして、第1軌道K11と予想通過領域80との交点が第1通過位置To1として設定される。そして、リリース位置Boおよび第1通過位置To1に基づいてボールの第2軌道K21が算出される。そして、第2軌道K21と予想通過領域80との交点が最終通過位置Sとして設定される。そして、リリース位置Boと第2軌道K21上のボールの移動位置B2とに対応するボールの予想通過位置YB2が算出される。そして、ボールの通過位置を示す報知画像が予想通過位置YB2および最終通過位置Sにおいて画像表示部3に連続的に表示される。
【選択図】図2An object of the present invention is to make it possible to change a power state of a moving body sent out from a character in accordance with an arrival position of the moving body.
In the game program, a first trajectory K11 of a ball is calculated based on a ball release position Bo and a target passage position Mo. Then, the intersection of the first trajectory K11 and the expected passage area 80 is set as the first passage position To1. Then, the second trajectory K21 of the ball is calculated based on the release position Bo and the first passing position To1. Then, the intersection point of the second trajectory K21 and the expected passage area 80 is set as the final passage position S. Then, an expected passing position YB2 of the ball corresponding to the release position Bo and the moving position B2 of the ball on the second trajectory K21 is calculated. Then, a notification image indicating the passing position of the ball is continuously displayed on the image display unit 3 at the predicted passing position YB2 and the final passing position S.
[Selection] Figure 2
Description
本発明は、ゲームプログラム、特に、画像表示部に表示されたキャラクタから移動体が送出されるゲームをコンピュータに実現させるためのゲームプログラムに関する。また、このゲームプログラムにより実現されるゲームを実行可能なゲーム装置、およびこのゲームプログラムにより実現されるゲームをコンピュータにより制御可能なビデオゲーム制御方法に関する。 The present invention relates to a game program, and more particularly to a game program for causing a computer to realize a game in which a moving object is sent from a character displayed on an image display unit. The present invention also relates to a game device capable of executing a game realized by the game program, and a video game control method capable of controlling the game realized by the game program by a computer.
従来から様々なビデオゲームが提案されている。これらビデオゲームは、ゲーム装置において実行されるようになっている。たとえば、一般的なゲーム装置は、モニタと、モニタとは別体のゲーム機本体と、ゲーム機本体とは別体の入力部たとえばコントローラとを有している。コントローラには、複数の入力釦が配置されている。このようなゲーム装置においては、入力釦を操作することにより、モニタに表示されたキャラクタを動作させることができるようになっている。 Conventionally, various video games have been proposed. These video games are executed in a game device. For example, a general game device includes a monitor, a game machine main body separate from the monitor, and an input unit such as a controller separate from the game machine main body. The controller has a plurality of input buttons. In such a game apparatus, a character displayed on a monitor can be operated by operating an input button.
このようなゲーム装置において実行されるゲームの1つとして、対戦ゲームたとえば野球ゲームがある(非特許文献1を参照)。この野球ゲームにおいて、投手キャラクタからボールが投球される場合、まず、X印付きボタンが押されると、投手キャラクタは投球動作を開始する。そして、左スティックが操作されると、左スティックの操作方向に投球カーソルが移動する。そして、投球カーソルを所望の位置に移動させた後、所定のタイミングでX印付きボタンが再度押されると、投手キャラクタは投球カーソルの位置(所望のコース)に向けてボールをリリースする。 One of the games executed in such a game apparatus is a battle game such as a baseball game (see Non-Patent Document 1). In this baseball game, when a ball is thrown from a pitcher character, first, when the button with the X mark is pressed, the pitcher character starts a pitching action. When the left stick is operated, the pitching cursor moves in the operation direction of the left stick. Then, after the pitching cursor is moved to a desired position, when the button with the X mark is pressed again at a predetermined timing, the pitcher character releases the ball toward the position of the pitching cursor (desired course).
このような野球ゲームにおいて、投手キャラクタからボールがリリースされると、投手キャラクタからリリースされたボールに対応するボール形状の画像が打撃ポイントとしてモニタに表示される。そして、リリースされたボールが捕手側に移動するにつれて、打撃ポイントがボールの球種に応じて所定量だけ移動する。たとえば、右投手キャラクタからリリースされたボールの球種がスライダーである場合は、打者キャラクタから見て打撃ポイントが右方向に移動する状態がモニタに表示される。また、右投手キャラクタからリリースされたボールの球種がカーブである場合は、打者キャラクタから見て打撃ポイントが右下方向に移動する状態がモニタに表示される。
従来の野球ゲームでは、投手キャラクタからリリースされたボールの球種に応じた移動量に基づいて、打撃ポイントが移動するようになっていた。このため、投手キャラクタの投球フォームが異なっていたとしても、打撃ポイントの変化の仕方は同じになっていた。すなわち、投球フォームが異なる投手キャラクタから投球されたボールが変化球である場合、投球フォームの影響が、打撃ポイントの変化に影響を与えるようにはなっていなかった。たとえば、オーバースローの投手キャラクタとサイドスローの投手キャラクタとでは、投球フォームが異なるため、現実的には変化球による打撃ポイントの変化の仕方も異なるはずであるが、従来の野球ゲームでは、打撃ポイントの変化の仕方は同じになっていた。
すなわち、投手キャラクタの投球フォームがオーバースローであってもアンダースローであっても、投手キャラクタからリリースされたボールの球種がスライダーであれば、打者キャラクタから見て打撃ポイントが右方向に移動する状態がモニタに表示される。また、投手キャラクタからリリースされたボールの球種がカーブであれば、打者キャラクタから見て打撃ポイントが右下方向に移動する状態がモニタに表示される。これは、投手キャラクタからリリースされたボールの軌道変化による影響が、打撃ポイントを決定する際に反映されていなかったためである。
In the conventional baseball game, the hit point moves based on the amount of movement corresponding to the ball type released from the pitcher character. For this reason, even if the pitch form of the pitcher character is different, the way of changing the hit point is the same. That is, when a ball thrown from a pitcher character having a different pitching form is a changing ball, the influence of the pitching form does not affect the change of the hitting point. For example, the pitching form is different between an overslow pitcher character and a side thrower character, so the way of changing the hitting point due to the changing ball should be different in reality. The way of change was the same.
In other words, regardless of whether the pitching form of the pitcher character is overslow or underslow, if the ball type released from the pitcher character is a slider, the hit point moves to the right as viewed from the batter character Is displayed on the monitor. In addition, if the ball type released from the pitcher character is a curve, a state in which the hit point moves in the lower right direction when viewed from the batter character is displayed on the monitor. This is because the influence of the change in the trajectory of the ball released from the pitcher character is not reflected when the hitting point is determined.
本発明の目的は、キャラクタから送出された移動体の軌道の変化を、予想通過位置領域における各通過位置の変化に反映することができるようにすることにある。たとえば、投手キャラクタから投球されたボールの軌道の変化を、打撃ポイントの変化に反映することができるようにすることにある。 An object of the present invention is to enable a change in trajectory of a moving object sent from a character to be reflected in a change in each passing position in an expected passing position area. For example, the change in the trajectory of the ball thrown from the pitcher character can be reflected in the change in the hit point.
請求項1に係るゲームプログラムは、画像表示部に表示されたキャラクタから移動体が送出されるゲームを実現可能なコンピュータに、以下の機能を実現させるためのプログラムである。
(1)キャラクタから送出される移動体の予想通過領域を認識する予想通過領域認識機能。
(2)キャラクタから送出される移動体の目標通過位置を認識する目標通過位置認識機能。
(3)移動体をキャラクタに送出させるための送出命令を認識する送出命令認識機能。
(4)送出命令が制御部に認識されたときに移動体の送出位置を認識する送出位置認識機能。
(5)送出位置および目標通過位置を初期条件として移動体の第1軌道を算出し、第1軌道を認識する第1軌道認識機能。
(6)第1軌道と予想通過領域との交点を算出し、この交点を移動体の第1通過位置として認識する第1通過位置認識機能。
(7)送出位置および第1通過位置を初期条件として第1軌道上の移動体の変化量に対応する予想通過領域における移動体の変化量に基づいて移動体の第2軌道を算出し、第2軌道を認識する第2軌道認識機能。
(8)第2軌道と予想通過領域との交点を算出し、この交点を移動体の最終通過位置として認識する最終通過位置認識機能。
(9)送出位置と最終通過位置との間において第2軌道上の移動体の移動位置を認識する移動位置認識機能。
(10)送出位置と移動位置とに対応する予想通過領域における移動体の予想通過位置を算出し、予想通過位置を認識する予想通過位置認識機能。
(11)移動体の通過位置を報知するための報知画像に対応する画像データを予想通過位置および最終通過位置に割り当てる処理を実行する画像データ割当機能。
(12)報知画像を画像データを用いて画像表示部に連続的に表示する画像表示機能。
A game program according to
(1) An expected passage area recognition function for recognizing an expected passage area of a moving body transmitted from a character.
(2) A target passing position recognition function for recognizing a target passing position of a moving body sent from a character.
(3) A send command recognition function for recognizing a send command for sending a moving object to a character.
(4) A sending position recognition function for recognizing the sending position of the moving body when a sending command is recognized by the control unit.
(5) A first trajectory recognition function for calculating the first trajectory of the moving body using the sending position and the target passing position as initial conditions and recognizing the first trajectory.
(6) A first passage position recognition function that calculates an intersection point between the first trajectory and the predicted passage region and recognizes the intersection point as the first passage position of the moving body.
(7) calculating the second trajectory of the moving body based on the amount of change of the moving body in the expected passing region corresponding to the amount of change of the moving body on the first trajectory with the sending position and the first passing position as initial conditions; Second orbit recognition function that recognizes two orbits.
(8) A final passing position recognition function that calculates an intersection point between the second trajectory and the predicted passing region and recognizes this intersection point as the final passing position of the moving object.
(9) A moving position recognition function for recognizing the moving position of the moving body on the second track between the sending position and the final passing position.
(10) An expected passing position recognition function for calculating the expected passing position of the moving body in the expected passing area corresponding to the sending position and the moving position and recognizing the expected passing position.
(11) An image data assignment function for executing a process of assigning image data corresponding to a notification image for notifying a passage position of a moving body to an expected passage position and a final passage position.
(12) An image display function for continuously displaying the notification image on the image display unit using the image data.
このゲームプログラムでは、予想通過領域認識機能において、キャラクタから送出された移動体の予想通過領域が制御部に認識される。目標通過位置認識機能においては、キャラクタから送出される移動体の目標通過位置が制御部に認識される。送出命令認識機能においては、移動体をキャラクタに送出させるための送出命令が制御部に認識される。送出位置認識機能においては、送出命令が制御部に認識されたときに移動体の送出位置が制御部に認識される。第1軌道認識機能においては、送出位置および目標通過位置を初期条件として移動体の第1軌道が制御部により算出され、この第1軌道が制御部に認識される。第1通過位置認識機能においては、第1軌道と予想通過領域との交点が制御部により算出され、この交点が移動体の第1通過位置として制御部に認識される。第2軌道認識機能においては、送出位置および第1通過位置を初期条件として移動体の第2軌道が制御部により算出され、この第2軌道が制御部に認識される。最終通過位置認識機能においては、第2軌道と予想通過領域との交点が制御部により算出され、この交点が移動体の最終通過位置として制御部に認識される。移動位置認識機能においては、送出位置と最終通過位置との間において第2軌道上の移動体の移動位置が制御部に認識される。予想通過位置認識機能においては、送出位置と移動位置とに対応する予想通過領域における移動体の予想通過位置が制御部により算出され、この予想通過位置が制御部に認識される。画像データ割当機能においては、移動体の通過位置を報知するための報知画像に対応する画像データを予想通過位置および最終通過位置に割り当てる処理が制御部により実行される。画像表示機能においては、報知画像が画像データを用いて画像表示部に連続的に表示される。 In this game program, in the predicted passing area recognition function, the predicted passing area of the moving object sent from the character is recognized by the control unit. In the target passing position recognition function, the target passing position of the moving body sent from the character is recognized by the control unit. In the sending command recognition function, a sending command for sending the moving body to the character is recognized by the control unit. In the sending position recognition function, the sending position of the moving body is recognized by the control unit when the sending command is recognized by the control unit. In the first trajectory recognition function, the control unit calculates the first trajectory of the moving body using the sending position and the target passing position as initial conditions, and the first trajectory is recognized by the control unit. In the first passing position recognition function, the intersection between the first trajectory and the predicted passing area is calculated by the control unit, and this intersection is recognized by the control unit as the first passing position of the moving body. In the second trajectory recognition function, the second trajectory of the moving body is calculated by the control unit using the sending position and the first passing position as initial conditions, and the second trajectory is recognized by the control unit. In the final passage position recognition function, the intersection between the second trajectory and the expected passage area is calculated by the control unit, and this intersection is recognized by the control unit as the final passage position of the moving body. In the moving position recognition function, the moving position of the moving body on the second track is recognized by the control unit between the sending position and the final passing position. In the expected passage position recognition function, the predicted passage position of the moving body in the expected passage region corresponding to the sending position and the movement position is calculated by the control unit, and the predicted passage position is recognized by the control unit. In the image data assignment function, the control unit executes processing for assigning image data corresponding to a notification image for notifying the passage position of the moving object to the expected passage position and the final passage position. In the image display function, the notification image is continuously displayed on the image display unit using the image data.
たとえば、このゲームプログラムによって野球ゲームを実現した場合、第1軌道認識機能において、投手キャラクタがボールをリリースしたリリース位置および投手キャラクタにボールを投球させる目標となる目標通過位置を初期条件としてボールの第1軌道が制御部により算出される。そして、第1通過位置認識機能において、ボールの第1軌道とボールの予想通過領域との交点が制御部に算出され、この交点がボールの第1通過位置として制御部に認識される。そして、第2軌道認識機能において、リリース位置および第1通過位置を初期条件としてボールの第2軌道が制御部に算出され、この第2軌道が制御部に認識される。そして、最終通過位置認識機能において、第2軌道と予想通過領域との交点が制御部により算出され、この交点がボールの最終通過位置として制御部に認識される。そして、移動位置認識機能において、リリース位置と最終通過位置との間における第2軌道上のボールの移動位置が制御部に認識される。そして、予想通過位置認識機能において、リリース位置と移動位置とに対応する予想通過領域におけるボールの予想通過位置が制御部に算出され、この予想通過位置が制御部に認識される。そして、画像データ割当機能において、ボールの通過位置を報知するための報知画像に対応する画像データを予想通過位置および最終通過位置に割り当てる処理が制御部により実行される。そして、画像表示機能において、報知画像が画像データを用いて画像表示部に連続的に表示される。 For example, when a baseball game is realized by this game program, the first trajectory recognition function uses the release position where the pitcher character has released the ball and the target passing position which is the target for throwing the ball to the pitcher character as initial conditions. One trajectory is calculated by the control unit. Then, in the first passing position recognition function, the intersection between the first trajectory of the ball and the expected passing area of the ball is calculated by the control unit, and this intersection is recognized by the control unit as the first passing position of the ball. In the second trajectory recognition function, the second trajectory of the ball is calculated by the control unit using the release position and the first passing position as initial conditions, and the second trajectory is recognized by the control unit. In the final passing position recognition function, the intersection between the second trajectory and the predicted passing area is calculated by the control unit, and this intersection is recognized by the control unit as the final passing position of the ball. In the movement position recognition function, the movement position of the ball on the second track between the release position and the final passage position is recognized by the control unit. Then, in the predicted passing position recognition function, the predicted passing position of the ball in the predicted passing area corresponding to the release position and the moving position is calculated by the control unit, and the predicted passing position is recognized by the control unit. Then, in the image data allocation function, a process of allocating image data corresponding to the notification image for notifying the passing position of the ball to the expected passing position and the final passing position is executed by the control unit. In the image display function, the notification image is continuously displayed on the image display unit using the image data.
この場合、ボールの第1軌道に基づいてボールの第1通過位置が算出され、この第1通過位置とリリース位置とに基づいてボールの第2軌道が算出される。そして、ボールの第2軌道が予想通過領域に交わる点である最終通過位置が算出される。そして、リリース位置と、リリース位置と最終通過位置との間における第2軌道上のボールの移動位置とに対応するボールの予想通過位置が算出される。このように予想通過領域におけるボールの予想通過位置および最終通過位置を算出することにより、ボールの通過位置を報知するための報知画像を、予想通過位置および最終通過位置に表示することができる。これにより、投手キャラクタから投球されたボールの軌道の変化を、予想通過領域における各通過位置の変化に反映することができる。すなわち、キャラクタから送出された移動体の軌道の変化を、予想通過位置領域における各通過位置の変化に反映することができる。 In this case, the first passing position of the ball is calculated based on the first trajectory of the ball, and the second trajectory of the ball is calculated based on the first passing position and the release position. Then, a final passing position that is a point where the second trajectory of the ball intersects the expected passing region is calculated. Then, an expected passing position of the ball corresponding to the release position and the moving position of the ball on the second track between the releasing position and the final passing position is calculated. Thus, by calculating the expected passing position and the final passing position of the ball in the expected passing area, a notification image for notifying the passing position of the ball can be displayed at the predicted passing position and the final passing position. Thereby, the change of the trajectory of the ball thrown from the pitcher character can be reflected in the change of each passing position in the expected passing region. That is, the change in the trajectory of the moving body sent from the character can be reflected in the change in each passing position in the expected passing position area.
請求項2に係るゲームプログラムは、請求項1に記載のゲームプログラムにおいて、コンピュータに以下の機能をさらに実現させるためのプログラムである。
(13)送出位置と第1通過位置との間における第1軌道上の移動体の第1移動位置を認識する第1移動位置認識機能。
(14)送出位置と第1移動位置とに対応する予想通過領域における移動体の第1予想通過位置を算出し、第1予想通過位置を認識する第1予想通過位置認識機能。
(15)隣接する第1予想通過位置の間と第1予想通過位置および第1通過位置の間との位置変化量を算出し、この位置変化量を認識する位置変化量認識機能。
A game program according to
(13) A first movement position recognition function for recognizing the first movement position of the moving body on the first track between the sending position and the first passage position.
(14) A first predicted passing position recognition function for calculating the first predicted passing position of the moving body in the predicted passing area corresponding to the sending position and the first moving position and recognizing the first predicted passing position.
(15) A position change amount recognition function for calculating a position change amount between adjacent first predicted pass positions and between the first expected pass position and the first pass position, and recognizing the position change amount.
このゲームプログラムでは、第1移動位置認識機能において、送出位置と第1通過位置との間における第1軌道上の移動体の第1移動位置が制御部に認識される。第1予想通過位置認識機能においては、送出位置と第1移動位置とに対応する予想通過領域における移動体の第1予想通過位置が制御部により算出され、この第1予想通過位置が制御部に認識される。位置変化量認識機能においては、隣接する第1予想通過位置の間と第1予想通過位置および第1通過位置の間との位置変化量が制御部により算出され、この位置変化量が制御部に認識される。そして、第2軌道認識機能において、移動体の送出位置および第1通過位置を初期条件として、この位置変化量で変化する移動体の第2軌道が制御部により算出され、この第2軌道が制御部に認識される。 In this game program, in the first movement position recognition function, the first movement position of the moving body on the first track between the sending position and the first passage position is recognized by the control unit. In the first predicted passing position recognition function, the control unit calculates the first predicted passing position of the moving body in the predicted passing region corresponding to the sending position and the first moving position, and the first predicted passing position is stored in the control unit. Be recognized. In the position change amount recognition function, a position change amount between the adjacent first predicted pass positions and between the first expected pass position and the first pass position is calculated by the control unit, and this position change amount is sent to the control unit. Be recognized. Then, in the second trajectory recognition function, the second trajectory of the moving body that changes with the amount of change in position is calculated by the controller using the sending position and the first passing position of the moving body as initial conditions, and the second trajectory is controlled. Recognized by the department.
たとえば、このゲームプログラムによって野球ゲームを実現した場合、ボールのリリース位置と第1通過位置との間における第1軌道上のボールの第1移動位置が制御部に認識される。そして、リリース位置と第1移動位置とに対応する予想通過領域におけるボールの第1予想通過位置が制御部により算出され、この第1予想通過位置が制御部に認識される。そして、隣接する第1予想通過位置の間と第1予想通過位置および第1通過位置の間との位置変化量が制御部により算出され、この位置変化量が制御部に認識される。そして、リリース位置および第1通過位置を初期条件として、この位置変化量で変化するボールの第2軌道が制御部により算出され、この第2軌道が制御部に認識される。 For example, when a baseball game is realized by this game program, the control unit recognizes the first movement position of the ball on the first trajectory between the ball release position and the first passage position. Then, a first predicted passing position of the ball in the expected passing region corresponding to the release position and the first moving position is calculated by the control unit, and the first predicted passing position is recognized by the control unit. Then, the position change amount between the adjacent first predicted pass positions and between the first predicted pass position and the first pass position is calculated by the control unit, and this position change amount is recognized by the control unit. Then, with the release position and the first passing position as initial conditions, the control unit calculates a second trajectory of the ball that changes with the position change amount, and the control unit recognizes the second trajectory.
この場合、ボールの第1軌道の変化量である位置変化量をボールの第2軌道に反映することにより、投手キャラクタから投球されたボールの軌道の変化を、予想通過位置の変化に反映することができる。すなわち、キャラクタから送出された移動体の軌道の変化を、予想通過位置領域における各通過位置の変化に反映することができる。 In this case, the change in the trajectory of the ball thrown from the pitcher character is reflected in the change in the expected passing position by reflecting the change in position, which is the change in the first trajectory of the ball, in the second trajectory of the ball. Can do. That is, the change in the trajectory of the moving body sent from the character can be reflected in the change in each passing position in the expected passing position area.
請求項3に係るゲームプログラムは、請求項2に記載のゲームプログラムにおいて、コンピュータに以下の機能をさらに実現させるためのプログラムである。
(16)位置変化量を所定の割合で変更する処理を実行する位置変化量変更機能。
(17)変更された前記位置変化量に基づいて第1通過位置を基点として第1予想通過位置を修正する計算を実行し、修正された第1予想通過位置を認識する変更通過位置認識機能。
A game program according to
(16) A position change amount changing function for executing a process of changing the position change amount at a predetermined ratio.
(17) A changed passage position recognition function for executing a calculation for correcting the first predicted passage position based on the changed amount of position change and using the first passage position as a base point to recognize the corrected first predicted passage position .
このゲームプログラムでは、位置変化量変更機能において、予想通過領域における位置変化量を所定の割合で変更する処理が制御部により実行される。変更通過位置認識機能においては、変更された前記位置変化量に基づいて第1通過位置を基点として第1予想通過位置を修正する計算が実行され、修正された第1予想通過位置が認識される。そして、第2軌道認識機能において、移動体の送出位置および修正された第1通過位置を初期条件として、変更前の位置変化量又は変更後の位置変化量で変化する移動体の第2軌道が制御部に算出され、この第2軌道が制御部に認識される。 In this game program, in the position change amount changing function, a process of changing the position change amount in the expected passage area at a predetermined rate is executed by the control unit. In the changed passing position recognition function, a calculation for correcting the first predicted passing position is executed based on the changed position change amount with the first passing position as a base point , and the corrected first predicted passing position is recognized. . Then, in the second trajectory recognition function, the second trajectory of the moving body that changes with the position change amount before the change or the position change amount after the change is set with the sending position of the moving body and the corrected first passing position as initial conditions. It is calculated by the control unit, and this second trajectory is recognized by the control unit.
たとえば、このゲームプログラムによって野球ゲームを実現した場合、予想通過領域における位置変化量を所定の割合で変更する処理が制御部により実行される。そして、変更された位置変化量に基づいて第1通過位置を基点として第1予想通過位置を修正する計算が実行され、修正された第1予想通過位置が認識される。そして、ボールのリリース位置および修正された第1通過位置を初期条件として、位置変化量で変化するボールの第2軌道が制御部に算出され、この第2軌道が制御部に認識される。 For example, when a baseball game is realized by this game program, a process of changing the position change amount in the expected passage area at a predetermined rate is executed by the control unit. Based on the changed position change amount, a calculation for correcting the first predicted passing position is executed with the first passing position as a base point , and the corrected first predicted passing position is recognized. Then, using the release position of the ball and the corrected first passing position as initial conditions, the second trajectory of the ball that changes with the position change amount is calculated by the control unit, and the second trajectory is recognized by the control unit.
この場合、予想通過領域における位置変化量を所定の割合で変更し、上記の位置変化量で変化するボールの第2軌道に基づいて予想通過領域におけるボールの予想通過位置および最終通過位置を算出することにより、投手キャラクタから投球されたボールの軌道の変化を予想通過位置の変化に反映することができるとともに、ボールの予想通過位置および最終通過位置を所定の範囲内に位置するように変更することができる。すなわち、キャラクタから送出された移動体の軌道の変化を、予想通過位置領域における各通過位置の変化に反映することができ、各通過位置を所定の範囲内に位置するように変更することができる。 In this case, the position change amount in the expected pass area is changed at a predetermined rate, and the expected pass position and final pass position of the ball in the expected pass area are calculated based on the second trajectory of the ball that changes in the position change amount. Thus, the change of the trajectory of the ball thrown from the pitcher character can be reflected in the change of the predicted passing position, and the predicted passing position and the final passing position of the ball are changed to be within a predetermined range. Can do. In other words, the change in the trajectory of the moving body sent from the character can be reflected in the change in each passing position in the expected passing position area, and each passing position can be changed to be within a predetermined range. .
請求項4に係るゲームプログラムは、請求項2又は3に記載のゲームプログラムにおいて、コンピュータに以下の機能をさらに実現させるためのプログラムである。
(16)移動体の回転態様に対応した第1移動量と移動体に作用する重力に対応した第2移動量とを認識する移動量認識機能。
A game program according to claim 4 is a program for causing the computer to further realize the following functions in the game program according to
(16) A movement amount recognition function for recognizing the first movement amount corresponding to the rotation mode of the moving body and the second movement amount corresponding to the gravity acting on the moving body.
このゲームプログラムでは、移動量認識機能において、移動体の回転態様に対応した第1移動量と移動体に作用する重力に対応した第2移動量とが制御部に認識される。そして、第1軌道認識機能において、移動体の送出位置と目標通過位置とを通る初期軌道を第1移動量および第2移動量に基づいて修正する計算を制御部に実行させることにより移動体の第1軌道が制御部により算出され、第1軌道が制御部に認識される。 In this game program, in the movement amount recognition function, the control unit recognizes the first movement amount corresponding to the rotation mode of the moving body and the second movement amount corresponding to the gravity acting on the moving body. Then, in the first trajectory recognition function, by causing the control unit to execute a calculation for correcting the initial trajectory passing through the sending position of the moving body and the target passing position based on the first movement amount and the second movement amount, The first trajectory is calculated by the control unit, and the first trajectory is recognized by the control unit.
たとえば、このゲームプログラムによって野球ゲームを実現した場合、ボールの回転態様たとえば球種に対応した第1移動量とボールに作用する重力に対応した第2移動量とが制御部に認識される。そして、ボールのリリース位置と目標通過位置とを通る初期軌道を第1移動量および第2移動量に基づいて修正する計算を制御部に実行させることによりボールの第1軌道が制御部により算出され、この第1軌道が制御部に認識される。 For example, when a baseball game is realized by this game program, the control unit recognizes a ball movement mode, for example, a first movement amount corresponding to a ball type and a second movement amount corresponding to gravity acting on the ball. Then, the control unit calculates the first trajectory of the ball by causing the control unit to execute a calculation for correcting the initial trajectory passing through the ball release position and the target passing position based on the first movement amount and the second movement amount. The first trajectory is recognized by the control unit.
この場合、球種に対応する第1移動量と重力に対応する第2移動量とに基づいて、ボールのリリース位置と目標通過位置とを通る初期軌道を修正することにより、回転状態および重力の影響が考慮されたボールの第1軌道が算出される。この第1軌道の変化量である位置変化量をボールの第2軌道に反映することにより、投手キャラクタから投球されたボールの軌道の変化を、予想通過位置の変化に反映することができる。すなわち、キャラクタから送出された移動体の軌道の変化を、予想通過位置領域における各通過位置の変化に反映することができる。 In this case, by correcting the initial trajectory passing through the ball release position and the target passage position based on the first movement amount corresponding to the ball type and the second movement amount corresponding to the gravity, A first trajectory of the ball that takes into account the influence is calculated. By reflecting the position change amount, which is the change amount of the first trajectory, in the second trajectory of the ball, the change in the trajectory of the ball thrown from the pitcher character can be reflected in the change in the expected passing position. That is, the change in the trajectory of the moving body sent from the character can be reflected in the change in each passing position in the expected passing position area.
請求項5に係るゲームプログラムは、請求項2から4のいずれかに記載のゲームプログラムにおいて、第1軌道上の送出位置と第1移動位置とを予想通過領域に投影する計算を実行することにより移動体の第1予想通過位置が制御部により算出され、この第1予想通過位置が制御部に認識される。この機能は、第1予想通過位置認識機能において実現される。 A game program according to a fifth aspect is the game program according to any one of the second to fourth aspects, wherein the calculation is performed by projecting the sending position on the first trajectory and the first movement position onto the expected passage area. A first predicted passing position of the moving body is calculated by the control unit, and the first predicted passing position is recognized by the control unit. This function is realized in the first expected passing position recognition function.
たとえば、このゲームプログラムによって野球ゲームを実現した場合、第1軌道上のリリース位置と第1移動位置とを予想通過領域に投影する計算を制御部に実行させることによりボールの第1予想通過位置が制御部により算出され、この第1予想通過位置が制御部に認識される。 For example, when a baseball game is realized by this game program, the first expected passage position of the ball is determined by causing the control unit to execute a calculation for projecting the release position on the first trajectory and the first movement position onto the expected passage area. The first predicted passage position is calculated by the control unit and recognized by the control unit.
この場合、第1軌道上の送出位置と第1移動位置とを予想通過領域に投影することにより、ボールの第1予想通過位置が算出される。これにより、ボールの第1予想通過位置に基づいて第1軌道の変化量に対応する位置変化量をボールの第2軌道に反映することができ、投手キャラクタから投球されたボールの軌道の変化を、予想通過位置の変化に反映することができる。すなわち、キャラクタから送出された移動体の軌道の変化を、予想通過位置領域における各通過位置の変化に反映することができる。 In this case, the first expected passing position of the ball is calculated by projecting the delivery position on the first trajectory and the first moving position onto the expected passing area. Thereby, the position change amount corresponding to the change amount of the first trajectory can be reflected in the second trajectory of the ball based on the first predicted passing position of the ball, and the change of the trajectory of the ball thrown from the pitcher character can be reflected. It can be reflected in the change of the expected passing position. That is, the change in the trajectory of the moving body sent from the character can be reflected in the change in each passing position in the expected passing position area.
請求項6に係るゲームプログラムは、請求項1から5のいずれかに記載のゲームプログラムにおいて、移動体の最終通過位置を基点として第2軌道上の送出位置と移動位置とを予想通過領域に投影する計算を実行することにより移動体の予想通過位置が制御部により算出され、この予想通過位置が制御部に認識される。この機能は、予想通過位置認識機能において実現される。 A game program according to a sixth aspect is the game program according to any one of the first to fifth aspects, wherein the sending position and the moving position on the second trajectory are projected onto the expected passing area from the final passing position of the moving body as a base point. By executing this calculation, the predicted passing position of the moving body is calculated by the control unit, and the predicted passing position is recognized by the control unit. This function is realized in the expected passing position recognition function.
たとえば、このゲームプログラムによって野球ゲームを実現した場合、ボールの最終通過位置を基点として第2軌道上の送出位置と移動位置とを予想通過領域に投影する計算を制御部に実行させることによりボールの予想通過位置が制御部により算出され、この予想通過位置が制御部に認識される。 For example, when a baseball game is realized by this game program, the control unit executes a calculation for projecting the sending position and the moving position on the second trajectory onto the expected passing area from the final passing position of the ball as a base point. The predicted passing position is calculated by the control unit, and the predicted passing position is recognized by the control unit.
この場合、ボールの最終通過位置を基点として第2軌道上の送出位置と移動位置とを予想通過領域に投影することにより、ボールの予想通過位置が制御部により算出される。これにより、第1軌道の変化量に対応する位置変化量をボールの第2軌道を介してボールの予想通過位置に反映することができ、ボールの予想通過位置が最終的に最終通過位置に位置するようにすることができる。 In this case, the predicted passing position of the ball is calculated by the control unit by projecting the sending position and the moving position on the second trajectory onto the predicted passing area with the final passing position of the ball as a base point. As a result, the position change amount corresponding to the change amount of the first trajectory can be reflected in the expected passing position of the ball via the second trajectory of the ball, and the expected passing position of the ball is finally located at the final passing position. To be able to.
請求項7に係るゲーム装置は、画像表示部に表示されたキャラクタから移動体が送出されるゲームを実行可能なゲーム装置である。このゲーム装置は、キャラクタから送出された移動体の予想通過領域を認識する予想通過領域認識手段と、キャラクタから送出される移動体の目標通過位置を認識する目標通過位置認識手段と、移動体をキャラクタに送出させるための送出命令を認識する送出命令認識手段と、送出命令が制御部に認識されたときに移動体の送出位置を認識する送出位置認識手段と、送出位置および目標通過位置を初期条件として移動体の第1軌道を算出し、この第1軌道を認識する第1軌道認識手段と、第1軌道と予想通過領域との交点を算出し、この交点を移動体の第1通過位置として認識する第1通過位置認識手段と、送出位置および第1通過位置を初期条件として第1軌道上の移動体の変化量に対応する予想通過領域における移動体の変化量に基づいて移動体の第2軌道を算出し、この第2軌道を認識する第2軌道認識手段と、第2軌道と予想通過領域との交点を算出し、この交点を移動体の最終通過位置として認識する最終通過位置認識手段と、送出位置と最終通過位置との間における第2軌道上の移動体の移動位置を認識する移動位置認識手段と、送出位置と移動位置とに対応する予想通過領域における移動体の予想通過位置を算出し、予想通過位置を認識する予想通過位置認識手段と、移動体の通過位置を報知するための報知画像に対応する画像データを予想通過位置および最終通過位置に割り当てる処理を実行する画像データ割当手段と、報知画像を画像データを用いて画像表示部に連続的に表示する画像表示手段と、を備えている。 A game device according to a seventh aspect is a game device capable of executing a game in which a moving object is sent from a character displayed on an image display unit. This game apparatus includes an expected passing area recognition unit that recognizes an expected passing area of a moving body that is sent from a character, a target passing position recognition unit that recognizes a target passing position of a moving body that is sent from a character, and a moving body. A sending command recognition means for recognizing a sending command for sending to a character, a sending position recognition means for recognizing a sending position of a mobile object when the sending command is recognized by the control unit, and a sending position and a target passing position are initially set As a condition, the first trajectory of the moving body is calculated, the first trajectory recognition means for recognizing the first trajectory, the intersection of the first trajectory and the expected passing area is calculated, and this intersection is determined as the first passing position of the moving body. First passing position recognizing means for recognizing as follows, and based on the amount of change of the moving body in the expected passing region corresponding to the amount of change of the moving body on the first trajectory with the sending position and the first passing position as initial conditions The second trajectory of the moving body is calculated, the second trajectory recognizing means for recognizing the second trajectory, the intersection of the second trajectory and the expected passing area is calculated, and this intersection is recognized as the final passing position of the moving body. A final passing position recognizing means, a moving position recognizing means for recognizing the moving position of the moving body on the second trajectory between the sending position and the final passing position, and a movement in an expected passing area corresponding to the sending position and the moving position. A process of assigning image data corresponding to a notification image for notifying an expected passage position of the mobile body and calculating an expected passage position and a notification image for notifying the passage position of the mobile body to the expected passage position and the final passage position; And an image display means for continuously displaying the notification image on the image display unit using the image data.
請求項8に係るゲーム制御方法は、画像表示部に表示されたキャラクタから移動体が送出されるゲームをコンピュータにより制御するゲーム制御方法である。このゲーム制御方法は、キャラクタから送出された移動体の予想通過領域を認識する予想通過領域認識ステップと、キャラクタから送出される移動体の目標通過位置を認識する目標通過位置認識ステップと、移動体をキャラクタに送出させるための送出命令を認識する送出命令認識ステップと、送出命令が制御部に認識されたときに移動体の送出位置を認識する送出位置認識ステップと、送出位置および目標通過位置を初期条件として移動体の第1軌道を算出し、この第1軌道を認識する第1軌道認識ステップと、第1軌道と予想通過領域との交点を算出し、この交点を移動体の第1通過位置として認識する第1通過位置認識ステップと、送出位置および第1通過位置を初期条件として第1軌道上の移動体の変化量に対応する予想通過領域における移動体の変化量に基づいて移動体の第2軌道を算出し、この第2軌道を認識する第2軌道認識ステップと、第2軌道と予想通過領域との交点を算出し、この交点を移動体の最終通過位置として認識する最終通過位置認識ステップと、送出位置と最終通過位置との間における第2軌道上の移動体の移動位置を認識する移動位置認識ステップと、送出位置と移動位置とに対応する予想通過領域における移動体の予想通過位置を算出し、予想通過位置を認識する予想通過位置認識ステップと、移動体の通過位置を報知するための報知画像に対応する画像データを予想通過位置および最終通過位置に割り当てる処理を実行する画像データ割当ステップと、報知画像を画像データを用いて画像表示部に連続的に表示する画像表示ステップと、を備えている。 A game control method according to an eighth aspect is a game control method in which a computer controls a game in which a moving body is sent from a character displayed on an image display unit. The game control method includes an expected passing area recognition step for recognizing an expected passing area of a moving object sent from a character, a target passing position recognition step for recognizing a target passing position of the moving object sent from the character, and a moving object. A sending command recognition step for recognizing a sending command for sending the character to the character, a sending position recognition step for recognizing the sending position of the moving body when the sending command is recognized by the control unit, a sending position and a target passing position. The first trajectory of the moving body is calculated as an initial condition, the first trajectory recognition step for recognizing the first trajectory, the intersection of the first trajectory and the expected passage area is calculated, and the intersection is the first passage of the moving body. A first passing position recognition step for recognizing as a position, and an expected passing region corresponding to the amount of change of the moving body on the first trajectory with the sending position and the first passing position as initial conditions. A second trajectory of the moving body is calculated based on the amount of change of the moving body, a second trajectory recognition step for recognizing the second trajectory, an intersection of the second trajectory and the expected passage area, and the intersection A final passing position recognizing step for recognizing the moving body as a final passing position, a moving position recognizing step for recognizing the moving position of the moving body on the second track between the sending position and the final passing position, and the sending position and the moving position. The predicted passing position of the moving body in the expected passing area corresponding to the above is calculated, the predicted passing position recognition step for recognizing the predicted passing position, and the image data corresponding to the notification image for notifying the passing position of the moving body are predicted. An image data allocating step for executing a process for allocating to the passing position and the final passing position, and an image displaying step for continuously displaying the notification image on the image display unit using the image data. There.
本発明では、キャラクタから送出されたボールの軌道の変化を、予想通過位置領域における各通過位置の変化に反映することができる。詳細には、移動体の第1軌道の変化量である位置変化量を移動体の第2軌道に反映することにより、キャラクタから送出された移動体の軌道の変化を、予想通過位置の変化に反映することができる。また、予想通過領域における位置変化量を所定の割合で変更し、上記の位置変化量で変化する移動体の第2軌道に基づいて予想通過領域における移動体の予想通過位置および最終通過位置を算出することにより、キャラクタから送出された移動体の軌道の変化を予想通過位置の変化に反映することができるとともに、移動体の予想通過位置および最終通過位置を所定の範囲内に位置するように変更することができる。また、回転態様に対応する第1移動量と重力に対応する第2移動量とに基づいて、移動体の送出位置と目標通過位置とを通る初期軌道を修正することにより、回転状態および重力の影響が考慮された移動体の第1軌道が算出される。この第1軌道の変化量である位置変化量を移動体の第2軌道に反映することにより、キャラクタから送出された移動体の軌道の変化を、予想通過位置の変化に反映することができる。また、移動体の第1予想通過位置に基づいて第1軌道の変化量に対応する位置変化量を移動体の第2軌道に反映することができ、キャラクタから送出された移動体の軌道の変化を、移動体の第2軌道を介して予想通過位置の変化に反映することができる。さらに、第1軌道の変化量に対応する位置変化量を移動体の第2軌道を介して移動体の予想通過位置に反映することができ、移動体の予想通過位置が最終的に最終通過位置に位置するようにすることができる。 In the present invention, the change in the trajectory of the ball sent from the character can be reflected in the change in each passing position in the expected passing position area. Specifically, the change in the trajectory of the moving object sent from the character is changed to the change in the expected passing position by reflecting the change in position, which is the change in the first trajectory of the moving object, in the second trajectory of the moving object. Can be reflected. Also, the position change amount in the expected passage area is changed at a predetermined rate, and the expected passage position and the final passage position of the moving body in the expected passage area are calculated based on the second trajectory of the moving body that changes in the position change amount. As a result, the change in the trajectory of the moving object sent from the character can be reflected in the change in the expected passing position, and the expected passing position and the final passing position of the moving object are changed to be within a predetermined range. can do. In addition, by correcting the initial trajectory passing through the sending position of the moving body and the target passing position based on the first moving amount corresponding to the rotation mode and the second moving amount corresponding to the gravity, A first trajectory of the moving object that takes into account the influence is calculated. By reflecting the position change amount, which is the change amount of the first trajectory, in the second trajectory of the mobile object, the change in the trajectory of the mobile object sent from the character can be reflected in the change in the expected passing position. Further, the position change amount corresponding to the change amount of the first trajectory can be reflected in the second trajectory of the mobile object based on the first predicted passing position of the mobile object, and the change of the trajectory of the mobile object sent from the character can be reflected. Can be reflected in the change of the expected passing position via the second trajectory of the moving body. Further, the position change amount corresponding to the change amount of the first trajectory can be reflected in the expected passing position of the moving body via the second trajectory of the moving body, and the expected passing position of the moving body is finally the final passing position. Can be located.
〔ゲーム装置の構成と動作〕
図1は、本発明の一実施形態によるゲーム装置の基本構成を示している。ここでは、ビデオゲーム装置の一例として、家庭用ビデオゲーム装置をとりあげて説明を行うこととする。家庭用ビデオゲーム装置は、家庭用ゲーム機本体および家庭用テレビジョンを備える。家庭用ゲーム機本体には、記録媒体10が装填可能となっており、記録媒体10からゲームデータが適宜読み出されてゲームが実行される。このようにして実行されるゲーム内容が家庭用テレビジョンに表示される。
[Configuration and operation of game device]
FIG. 1 shows a basic configuration of a game device according to an embodiment of the present invention. Here, a home video game device will be described as an example of the video game device. The home video game apparatus includes a home game machine body and a home television. The home game machine body can be loaded with a
家庭用ビデオゲーム装置のゲームシステムは、制御部1と、記憶部2と、画像表示部3と、音声出力部4と、操作入力部5とからなっており、それぞれがバス6を介して接続される。このバス6は、アドレスバス、データバス、およびコントロールバスなどを含んでいる。ここで、制御部1、記憶部2、音声出力部4および操作入力部5は、家庭用ビデオゲーム装置の家庭用ゲーム機本体に含まれており、画像表示部3は家庭用テレビジョンに含まれている。
The game system of the home video game apparatus includes a
制御部1は、主に、ゲームプログラムに基づいてゲーム全体の進行を制御するために設けられている。制御部1は、たとえば、CPU(Central Processing Unit)7と、信号処理プロセッサ8と、画像処理プロセッサ9とから構成されている。CPU7と信号処理プロセッサ8と画像処理プロセッサ9とは、それぞれがバス6を介して互いに接続されている。CPU7は、ゲームプログラムからの命令を解釈し、各種のデータ処理や制御を行う。たとえば、CPU7は、信号処理プロセッサ8に対して、画像データを画像処理プロセッサに供給するように命令する。信号処理プロセッサ8は、主に、3次元空間上における計算と、3次元空間上から擬似3次元空間上への位置変換計算と、光源計算処理と、3次元空間上又は擬似3次元空間上で実行された計算結果に基づいた画像および音声データの生成加工処理とを行っている。画像処理プロセッサ9は、主に、信号処理プロセッサ8の計算結果および処理結果に基づいて、描画すべき画像データをRAM12に書き込む処理を行っている。また、CPU7は、信号処理プロセッサ8に対して、各種データを処理するように命令する。信号処理プロセッサ8は、主に、3次元空間上における各種データに対応する計算と、3次元空間上から擬似3次元空間上への位置変換計算とを行っている。
The
記憶部2は、主に、プログラムデータや、プログラムデータで使用される各種データなどを格納しておくために設けられている。記憶部2は、たとえば、記録媒体10と、インターフェース回路11と、RAM(Random Access Memory)12とから構成されている。記録媒体10には、インターフェース回路11が接続されている。そして、インターフェース回路11とRAM12とはバス6を介して接続されている。記録媒体10は、オペレーションシステムのプログラムデータや、画像データ、音声データ並びに各種プログラムデータからなるゲームデータなどを記録するためのものである。この記録媒体10は、たとえば、ROM(Read Only Memory)カセット、光ディスク、およびフレキシブルディスクなどであり、オペレーティングシステムのプログラムデータやゲームデータなどが記憶される。なお、記録媒体10にはカード型メモリも含まれており、このカード型メモリは、主に、ゲームを中断するときに中断時点での各種ゲームパラメータを保存するために用いられる。RAM12は、記録媒体10から読み出された各種データを一時的に格納したり、制御部1からの処理結果を一時的に記録したりするために用いられる。このRAM12には、各種データとともに、各種データの記憶位置を示すアドレスデータが格納されており、任意のアドレスを指定して読み書きすることが可能になっている。
The
画像表示部3は、主に、画像処理プロセッサ9によってRAM12に書き込まれた画像データや、記録媒体10から読み出される画像データなどを画像として出力するために設けられている。この画像表示部3は、たとえば、テレビジョンモニタ20と、インターフェース回路21と、D/Aコンバータ(Digital-To-Analogコンバータ)22とから構成されている。テレビジョンモニタ20にはD/Aコンバータ22が接続されており、D/Aコンバータ22にはインターフェース回路21が接続されている。そして、インターフェース回路21にバス6が接続されている。ここでは、画像データが、インターフェース回路21を介してD/Aコンバータ22に供給され、ここでアナログ画像信号に変換される。そして、アナログ画像信号がテレビジョンモニタ20に画像として出力される。
The
ここで、画像データには、たとえば、ポリゴンデータやテクスチャデータなどがある。ポリゴンデータはポリゴンを構成する頂点の座標データのことである。テクスチャデータは、ポリゴンにテクスチャを設定するためのものであり、テクスチャ指示データとテクスチャカラーデータとからなっている。テクスチャ指示データはポリゴンとテクスチャとを対応づけるためのデータであり、テクスチャカラーデータはテクスチャの色を指定するためのデータである。ここで、ポリゴンデータとテクスチャデータとには、各データの記憶位置を示すポリゴンアドレスデータとテクスチャアドレスデータとが対応づけられている。このような画像データでは、信号処理プロセッサ8により、ポリゴンアドレスデータの示す3次元空間上のポリゴンデータ(3次元ポリゴンデータ)が、画面自体(視点)の移動量データおよび回転量データに基づいて座標変換および透視投影変換されて、2次元空間上のポリゴンデータ(2次元ポリゴンデータ)に置換される。そして、複数の2次元ポリゴンデータでポリゴン外形を構成して、ポリゴンの内部領域にテクスチャアドレスデータが示すテクスチャデータを書き込む。このようにして、各ポリゴンにテクスチャが貼り付けられた物体つまり各種キャラクタを表現することができる。
Here, the image data includes, for example, polygon data and texture data. Polygon data is the coordinate data of vertices constituting a polygon. The texture data is for setting a texture on the polygon, and is composed of texture instruction data and texture color data. The texture instruction data is data for associating polygons and textures, and the texture color data is data for designating the texture color. Here, the polygon address data and the texture address data indicating the storage position of each data are associated with the polygon data and the texture data. In such image data, the
音声出力部4は、主に、記録媒体10から読み出される音声データを音声として出力するために設けられている。音声出力部4は、たとえば、スピーカー13と、増幅回路14と、D/Aコンバータ15と、インターフェース回路16とから構成されている。スピーカー13には増幅回路14が接続されており、増幅回路14にはD/Aコンバータ15が接続されており、D/Aコンバータ15にはインターフェース回路16が接続されている。そして、インターフェース回路16にバス6が接続されている。ここでは、音声データが、インターフェース回路16を介してD/Aコンバータ15に供給され、ここでアナログ音声信号に変換される。このアナログ音声信号が増幅回路14によって増幅され、スピーカー13から音声として出力される。音声データには、たとえば、ADPCM(Adaptive Differential Pulse Code Modulation)データやPCM(Pulse Code Modulation)データなどがある。ADPCMデータの場合、上述と同様の処理方法で音声をスピーカー13から出力することができる。PCMデータの場合、RAM12においてPCMデータをADPCMデータに変換しておくことで、上述と同様の処理方法で音声をスピーカー13から出力することができる。
The audio output unit 4 is provided mainly for outputting audio data read from the
操作入力部5は、主に、コントローラ17と、操作情報インターフェース回路18と、インターフェース回路19とから構成されている。コントローラ17には、操作情報インターフェース回路18が接続されており、操作情報インターフェース回路18にはインターフェース回路19が接続されている。そして、インターフェース回路19にバス6が接続されている。
The
コントローラ17は、プレイヤが種々の操作命令を入力するために使用する操作装置であり、プレイヤの操作に応じた操作信号をCPU7に送出する。コントローラ17には、第1ボタン17a、第2ボタン17b、第3ボタン17c、第4ボタン17d、上方向キー17U、下方向キー17D、左方向キー17L、右方向キー17R、L1ボタン17L1、L2ボタン17L2、R1ボタン17R1、R2ボタン17R2、スタートボタン17e、セレクトボタン17f、左スティック17SL及び右スティック17SRが設けられている。
The
上方向キー17U、下方向キー17D、左方向キー17L及び右方向キー17Rからなる十字ボタン17Bは、例えば、キャラクタやカーソルをテレビジョンモニタ20の画面上で上下左右に移動させるコマンドをCPU7に与えるために使用される。
The cross button 17B including the up direction key 17U, the down direction key 17D, the left direction key 17L, and the right direction key 17R gives, for example, a command to the
スタートボタン17eは、記録媒体10からゲームプログラムをロードするようにCPU7に指示するときなどに使用される。
The start button 17e is used when instructing the
セレクトボタン17fは、記録媒体10からロードされたゲームプログラムに対して、各種選択をCPU7に指示するときなどに使用される。
The
左スティック17SL及び右スティック17SRは、いわゆるジョイスティックとほぼ同一構成のスティック型コントローラである。このスティック型コントローラは、直立したスティックを有している。このスティックは、支点を中心として直立位置から前後左右を含む360°方向に亘って、傾倒可能な構成になっている。左スティック17SL及び右スティック17SRは、スティックの傾倒方向及び傾倒角度に応じて、直立位置を原点とするx座標及びy座標の値を、操作信号として操作情報インターフェース回路18とインターフェース回路19とを介してCPU7に送出する。
The left stick 17SL and the right stick 17SR are stick type controllers having substantially the same configuration as a so-called joystick. This stick type controller has an upright stick. The stick is configured to be tiltable from an upright position around the fulcrum in a 360 ° direction including front, rear, left and right. The left stick 17SL and the right stick 17SR pass through the operation
第1ボタン17a、第2ボタン17b、第3ボタン17c、第4ボタン17d、L1ボタン17L1、L2ボタン17L2、R1ボタン17R1及びR2ボタン17R2には、記録媒体10からロードされるゲームプログラムに応じて種々の機能が割り振られている。
The
なお、左スティック17SL及び右スティック17SRを除くコントローラ17の各ボタン及び各キーは、外部からの押圧力によって中立位置から押圧されるとオンになり、押圧力が解除されると中立位置に復帰してオフになるオンオフスイッチになっている。
Each button and each key of the
以上のような構成からなる家庭用ビデオゲーム装置の概略動作を、以下に説明する。電源スイッチ(図示省略)がオンにされゲームシステム1に電源が投入されると、CPU7が、記録媒体10に記憶されているオペレーティングシステムに基づいて、記録媒体10から画像データ、音声データ、およびプログラムデータを読み出す。読み出された画像データ、音声データ、およびプログラムデータの一部若しくは全部は、RAM12に格納される。そして、CPU7が、RAM12に格納されたプログラムデータに基づいて、RAM12に格納された画像データや音声データにコマンドを発行する。
The schematic operation of the home video game apparatus having the above configuration will be described below. When a power switch (not shown) is turned on and the
画像データの場合、CPU7からのコマンドに基づいて、まず、信号処理プロセッサ8が、3次元空間上におけるキャラクタの位置計算および光源計算などを行う。次に、画像処理プロセッサ9が、信号処理プロセッサ8の計算結果に基づいて、描画すべき画像データのRAM12への書き込み処理などを行う。そして、RAM12に書き込まれた画像データが、インターフェース回路13を介してD/Aコンバータ17に供給される。ここで、画像データがD/Aコンバータ17でアナログ映像信号に変換される。そして、画像データはテレビジョンモニタ20に供給され画像として表示される。
In the case of image data, based on a command from the
音声データの場合、まず、信号処理プロセッサ8が、CPU7からのコマンドに基づいて音声データの生成および加工処理を行う。ここでは、音声データに対して、たとえば、ピッチの変換、ノイズの付加、エンベロープの設定、レベルの設定及びリバーブの付加などの処理が施される。次に、音声データは、信号処理プロセッサ8から出力されて、インターフェース回路16を介してD/Aコンバータ15に供給される。ここで、音声データがアナログ音声信号に変換される。そして、音声データは増幅回路14を介してスピーカー13から音声として出力される。
In the case of audio data, first, the
〔ゲーム装置における各種処理概要〕
本ゲーム機1において実行されるゲームは、たとえば野球ゲームである。本ゲーム機1では、画像表示部3に表示されたキャラクタから移動体が送出されるゲームが実行可能になっている。具体的には、本ゲーム機1では、テレビジョンモニタ20に表示された投手キャラクタからボールが投球されるゲームが実行可能になっている。図2は、本発明で主要な役割を果たす手段を説明するための機能ブロック図である。
[Outline of various processes in game devices]
The game executed on the
予想通過領域認識手段50は、投手キャラクタから投球されるボールの予想通過領域をCPU7に認識させる機能を備えている。
The expected passing area recognition means 50 has a function of causing the
この手段では、投手キャラクタから投球されたボールの予想通過領域内の座標を示す座標データが制御部に認識される。予想通過領域内の座標データはゲームプログラムのロード時に記録媒体10からRAM12に供給され、RAM12に格納された予想通過領域内の座標データがCPU7に認識される。ボールの予想通過領域は、矩形状のストライクゾーンとストライクゾーンを取り囲むボールゾーンとからなっており、RAM12に格納された予想通過領域内の座標データがCPU7に認識されたときに、ストライクゾーン内の座標データおよびボールゾーン内の座標データがCPU7に認識される。なお、本ゲームでは、ホームベースから2塁ベースに向かう方向がZ軸方向となっており、X軸およびY軸がZ軸に直交するように定義されている。ここでは、X軸が水平方向となっておりY軸が垂直方向となっている。
In this means, the control unit recognizes coordinate data indicating coordinates in the expected passage area of the ball thrown from the pitcher character. The coordinate data in the expected passage area is supplied from the
球種選択手段51は、記憶部2に格納されたボールの球種をCPU7に認識させる機能を備えている。
The ball
この手段では、コントローラ17の上方向キー17U、下方向キー17D、左方向キー17L及び右方向キー17Rからなる十字ボタン17Bのいずれか1つのキーが操作されると、操作されたキーに対応する入力信号がコントローラ17からCPU7に発行され、この入力信号がCPU7に認識される。すると、この入力信号に対応する球種、すなわち操作されたキーに割り当てられた球種がCPU7に認識される。なお、球種は、ゲームプログラムのロード時に記録媒体10からRAM12に供給され、RAM12に格納されている。
In this means, when any one of the cross buttons 17B including the up key 17U, the down key 17D, the
投球開始命令認識手段52は、投手キャラクタに投球動作を開始させるための投球開始命令をCPU7に認識させる機能を備えている。
The pitching start command recognition unit 52 has a function of causing the
この手段では、投手キャラクタに投球動作を開始させるための投球開始命令がCPU7に認識される。たとえば、コントローラ17の下方向キー17Dが操作されると、投手キャラクタに投球動作を開始させるための投球開始信号がコントローラ17から発行され、この投球開始信号に対応する投球開始命令がCPU7に認識される。すると、この投球開始命令がCPU7から発行され、テレビジョンモニタ20に表示された投手キャラクタが投球動作を開始し、投手キャラクタが投球動作する状態が画像データを用いてテレビジョンモニタ20に表示される。
With this means, the
目標通過位置認識手段53は、投手キャラクタから投球されるボールの目標通過位置をCPU7に認識させる機能を備えている。
The target passage position recognition means 53 has a function of causing the
この手段では、投手キャラクタから投球されるボールの目標通過位置がCPU7に認識される。たとえば、投手キャラクタに投球に関する指示をするための画面がテレビジョンモニタ20に表示されると、投手キャラクタから投球されるボールの目標位置を報知するための投球カーソルをテレビジョンモニタ20に表示するための表示命令がCPU7から発行され、投球カーソル用の画像データがテレビジョンモニタ20の所定の位置たとえば予想通過領域の中央部に表示される。この投球カーソルの位置を示す座標は、初期状態のボールの目標通過位置としてCPU7に認識される。そして、コントローラ17の左スティック17SLが操作されると、左スティック17SLの傾倒方向および傾倒量がCPU7に認識され、初期状態のボールの目標通過位置の座標を左スティック17SLの傾倒方向に傾倒量だけ移動させる計算がCPU7に実行される。これにより、ボールの目標通過位置が移動し、移動後のボールの目標通過位置の座標がCPU7に認識される。ここで、ボールの目標通過位置の移動中には、ボールの目標通過位置の座標位置に投球カーソルが表示されている。なお、投球カーソル用の画像データおよび初期状態のボールの目標通過位置の座標はゲームプログラムのロード時に記録媒体10からRAM12に供給され、この画像データおよび座標はRAM12に格納されている。
With this means, the
リリース命令認識手段54は、投手キャラクタにボールをリリースさせるためのリリース命令をCPU7に認識させる機能を備えている。
The release command recognition means 54 has a function of causing the
この手段では、投手キャラクタにボールをリリースさせるためのリリース命令がCPU7に認識される。たとえば、コントローラ17の下方向キー17Dが操作されると、投手キャラクタにボールをリリースさせるためのリリース信号がコントローラ17から発行され、このリリース信号に対応するリリース命令がCPU7に認識される。すると、このリリース命令がCPU7から発行され、テレビジョンモニタ20に表示された投手キャラクタからボールがリリースされ、リリースされたボールの画像データがテレビジョンモニタ20に表示される。
With this means, the
リリース位置認識手段55は、リリース命令がCPU7に認識されたときのボールのリリース位置をCPU7に認識させる機能を備えている。
The release position recognition means 55 has a function of causing the
この手段では、リリース命令がCPU7に認識されたときのボールのリリース位置がCPU7に認識される。たとえば、リリース命令がCPU7に認識されると、投手キャラクタからリリースされたボールのリリース位置を示す座標がCPU7に認識される。
With this means, the release position of the ball when the release command is recognized by the
移動量認識手段56は、ボールの球種に対応した第1移動量とボールに作用する重力に対応した第2移動量とをCPU7に認識させる機能を備えている。
The movement amount recognition means 56 has a function of causing the
この手段では、ボールの球種に対応した第1移動量とボールに作用する重力に対応した第2移動量とがCPU7に認識される。たとえば、ボールの球種に対応した所定の第1速度データに単位フレームあたり時間を乗じる処理をCPU7に実行させることにより、第1移動量は算出される。この第1速度データはゲームプログラムのロード時に記録媒体10からRAM12に供給され、RAM12に格納された第1速度データがCPU7に認識される。また、ボールに作用する重力に対応した所定の第2速度データに単位フレームあたりの時間を乗じる処理をCPU7に実行させることにより、第2移動量は算出される。この第2速度データはゲームプログラムのロード時に記録媒体10からRAM12に供給され、RAM12に格納された第2速度データがCPU7に認識される。
In this means, the
第1軌道認識手段57は、リリース位置および目標通過位置を初期条件としてボールの第1軌道をCPU7に算出させ、第1軌道をCPU7に認識させる機能を備えている。詳細には、第1軌道認識手段57は、リリース位置と目標通過位置とを通る初期軌道を第1移動量および第2移動量に基づいて修正する計算をCPU7に実行させることによりボールの第1軌道をCPU7に算出させ、この第1軌道をCPU7に認識させる機能を備えている。
The first
この手段では、リリース位置と目標通過位置とを通る初期軌道を第1移動量および第2移動量に基づいて修正する計算をCPU7に実行させることにより、ボールの第1軌道がCPU7により算出され、この第1軌道がCPU7に認識される。たとえば、リリース位置の座標と目標通過位置の座標とを通る初期軌道を第1移動量および第2移動量に基づいて修正する計算がCPU7により実行される。より具体的には、初期軌道上の座標に第1移動量および第2移動量を加算する処理がCPU7により実行される。そして、この処理により求められた座標を通る軌道が第1軌道としてCPU7に認識される。
In this means, the
第1通過位置認識手段58は、第1軌道と予想通過領域との交点をCPU7に算出させ、この交点をボールの第1通過位置としてCPU7に認識させる機能を備えている。
The first passing position recognizing means 58 has a function of causing the
この手段では、第1軌道と予想通過領域との交点がCPU7により算出され、この交点がボールの第1通過位置としてCPU7に認識される。たとえば、第1軌道と予想通過領域との交点となる座標がCPU7により算出され、この交点の座標がボールの第1通過位置の座標としてCPU7に認識される。
In this means, the intersection of the first trajectory and the expected passage area is calculated by the
第1移動位置認識手段59は、リリース位置と第1通過位置との間における第1軌道上のボールの第1移動位置をCPU7に認識させる機能を備えている。
The first movement position recognition means 59 has a function of causing the
この手段では、リリース位置と第1通過位置との間における第1軌道上のボールの第1移動位置がCPU7に認識される。たとえば、リリース位置の座標と第1通過位置の座標との間における第1軌道により規定されるボールの第1移動位置の座標がCPU7に認識される。
In this means, the
第1予想通過位置認識手段60は、リリース位置と第1移動位置とに対応する予想通過領域におけるボールの第1予想通過位置をCPU7に算出させ、第1予想通過位置をCPU7に認識させる機能を備えている。詳細には、第1予想通過位置認識手段60は、第1軌道上のリリース位置と第1移動位置とを予想通過領域に投影する計算をCPU7に実行させることによりボールの第1予想通過位置をCPU7に算出させ、第1予想通過位置をCPU7に認識させる機能を備えている。
The first predicted passing position recognizing means 60 has a function of causing the
この手段では、第1軌道上のリリース位置と第1移動位置とを予想通過領域に投影する計算をCPU7に実行させることによりボールの第1予想通過位置がCPU7により算出され、この第1予想通過位置がCPU7に認識される。たとえば、リリース位置の座標と第1移動位置の座標とを予想通過領域に投影する計算がCPU7により実行される。すると、予想通過領域すなわち所定のZ座標の位置における、リリース位置のX座標およびY座標と第1移動位置のX座標およびY座標とがCPU7により算出され、これらリリース位置と第1移動位置との座標(X,Y,Z(予想通過領域が規定されたZ座標))が、ボールの第1予想通過位置の座標としてCPU7に認識される。
In this means, the
位置変化量認識手段61は、隣接する第1予想通過位置の間と第1予想通過位置および第1通過位置の間との位置変化量をCPU7に算出させ、この位置変化量をCPU7に認識させる機能を備えている。
The position change amount recognizing means 61 causes the
この手段では、隣接する第1予想通過位置の間と第1予想通過位置および第1通過位置の間との位置変化量がCPU7により算出され、この位置変化量がCPU7に認識される。たとえば、隣接する第1予想通過位置の一方の座標から隣接する第1予想通過位置の他方の座標を減算する処理をCPU7に実行させることにより、隣接する第1予想通過位置の一方と隣接する第1予想通過位置の他方との間の変化量が算出される。また、第1通過位置の座標から第1通過位置に隣接する第1予想通過位置の座標を減算する処理をCPU7に実行させることにより、第1通過位置と第1通過位置に隣接する第1予想通過位置との間の変化量が算出される。このようにして算出された変化量が、位置変化量としてCPU7に認識される。
In this means, the
位置変化量変更手段62は、位置変化量を所定の割合で変更する処理をCPU7に実行させる機能を備えている。
The position change
この手段では、位置変化量を所定の割合で変更する処理がCPU7により実行される。たとえば、上記のように算出された位置変化量に対して所定の係数たとえば1以下の係数を乗じる処理をCPU7に実行させることにより、位置変化量が所定の割合で変更される。
In this means, the
変更通過位置認識手段63は、変更された位置変化量に基づいて第1通過位置を修正する計算を制御部に実行させ、修正された第1通過位置を制御部に認識させる機能を備えている。 The changed passage position recognizing means 63 has a function of causing the control unit to execute calculation for correcting the first passage position based on the changed position change amount, and causing the control unit to recognize the corrected first passage position. .
この手段では、変更された位置変化量に基づいて第1通過位置を修正する計算が制御部により実行され、修正された第1通過位置が制御部に認識される。たとえば、所定の第1予想通過位置の座標を基点として、リリース位置側の第1予想通過位置においては、所定の第1予想通過位置に変更された位置変化量を順次減算する計算をCPU7に実行させる。また、所定の第1予想通過位置の座標を基点として、リリース位置から離反する側の第1予想通過位置においては、所定の第1予想通過位置に変更された位置変化量を順次加算する計算をCPU7に実行させる。この処理により求められた座標が、修正された第1予想通過位置および修正された第1通過位置として制御部に認識される。言い換えると、この処理により求められた座標が、第1予想通過位置および第1通過位置として制御部に再認識される。
In this means, calculation for correcting the first passing position is executed by the control unit based on the changed position change amount, and the corrected first passing position is recognized by the control unit. For example, the
第2軌道認識手段64は、リリース位置および第1通過位置を初期条件としてボールの第2軌道をCPU7に算出させ、この第2軌道をCPU7に認識させる機能を備えている。詳細には、第2軌道認識手段64は、リリース位置および第1通過位置を初期条件として、上記の位置変化量で変化するボールの第2軌道をCPU7に算出させ、この第2軌道をCPU7に認識させる機能を備えている。
The second trajectory recognition means 64 has a function of causing the
この手段では、リリース位置と第1通過位置とを初期条件として、上記の位置変化量で変化するボールの第2軌道がCPU7により算出され、この第2軌道がCPU7に認識される。たとえば、リリース位置の座標と第1通過位置の座標とを通る初期軌道を、上記の位置変化量に基づいて修正する計算がCPU7により実行される。より具体的には、初期軌道上の座標に位置変化量を加減算する処理がCPU7により実行される。そして、この処理により求められた座標を通る軌道が第2軌道としてCPU7に認識される。
In this means, the
最終通過位置認識手段65は、第2軌道と予想通過領域との交点をCPU7に算出させ、交点をボールの最終通過位置としてCPU7に認識させる機能を備えている。
The final passing position recognizing means 65 has a function of causing the
この手段では、第2軌道と予想通過領域との交点がCPU7により算出され、この交点がボールの最終通過位置としてCPU7に認識される。たとえば、第2軌道と予想通過領域との交点となる座標がCPU7により算出され、この交点の座標がボールの最終通過位置としてCPU7に認識される。
In this means, the intersection of the second trajectory and the predicted passage area is calculated by the
移動位置認識手段66は、リリース位置と最終通過位置との間における第2軌道上のボールの移動位置をCPU7に認識させる機能を備えている。
The movement position recognition means 66 has a function of causing the
この手段では、リリース位置と最終通過位置との間における第2軌道上のボールの移動位置がCPU7に認識される。たとえば、リリース位置の座標と最終通過位置の座標との間における第2軌道により規定されるボールの移動位置の座標がCPU7に認識される。
With this means, the movement position of the ball on the second track between the release position and the final passing position is recognized by the
予想通過位置認識手段67は、リリース位置と移動位置とに対応する予想通過領域におけるボールの予想通過位置をCPU7に算出させ、この予想通過位置をCPU7に認識させる機能を備えている。詳細には、予想通過位置認識手段67は、最終通過位置を基点として第2軌道上のリリース位置と移動位置とを予想通過領域に投影する計算をCPU7に実行させることによりボールの予想通過位置をCPU7に算出させ、この予想通過位置をCPU7に認識させる機能を備えている。
The predicted passing
この手段では、最終通過位置を基点として第2軌道上のリリース位置と移動位置とを予想通過領域に投影する計算をCPU7に実行させることによりボールの予想通過位置がCPU7により算出され、この予想通過位置がCPU7に認識される。たとえば、最終通過位置の座標を基点として、リリース位置の座標の投影点が予想通過領域における目標通過位置の座標になるように、リリース位置の座標と移動位置の座標とを予想通過領域に投影する計算がCPU7により実行される。これにより、予想通過領域における、第2軌道上のリリース位置および移動位置に対応する予想通過位置がCPU7により算出され、この予想通過位置がCPU7に認識される。この場合、リリース位置に対応する予想通過位置が目標通過位置に一致し、移動位置に対応する予想通過位置は目標通過位置と最終通過位置との間に位置することになる。
In this means, the
画像データ割当手段68は、ボールの通過位置を報知するための報知画像に対応する画像データを予想通過位置および最終通過位置に割り当てる処理をCPU7に実行させる機能を備えている。
The image
この手段では、ボールの通過位置を報知するための報知画像に対応する画像データを予想通過位置および最終通過位置に割り当てる処理がCPU7により実行される。たとえば、予想通過位置の座標および最終通過位置の座標がCPU7に認識されると、報知画像に対応する画像データが、予想通過位置の座標および最終通過位置の各座標に基づいて、リリース位置に対応する予想通過位置、移動位置に対応する予想通過位置、最終通過位置に、CPU7により順次割り当てられる。なお、報知画像に対応する画像データはゲームプログラムのロード時に記録媒体10からRAM12に供給され、この画像データはRAM12に格納されている。
In this means, the
画像表示手段69は、報知画像を画像データを用いてテレビジョンモニタ20に連続的に表示する機能を備えている。
The image display means 69 has a function of continuously displaying the notification image on the
この手段では、報知画像が画像データを用いてテレビジョンモニタ20に連続的に表示される。たとえば、報知画像に対応する画像データが、リリース位置に対応する予想通過位置、移動位置に対応する予想通過位置、最終通過位置に割り当てられると、報知画像をテレビジョンモニタ20に表示するための表示命令がCPU7から発行される。すると、報知画像用の画像データが、リリース位置に対応する予想通過位置、移動位置に対応する予想通過位置、最終通過位置の順にテレビジョンモニタ20に連続的に表示される。
With this means, the notification image is continuously displayed on the
〔野球ゲームにおける威力状態表示システムの処理フローと説明〕
次に、野球ゲームにおける投球カーソル移動システムの具体的な内容について説明する。また、図15に示す投球カーソル移動システムの処理フローについても同時に説明する。
[Processing flow and explanation of power status display system in baseball game]
Next, specific contents of the pitching cursor movement system in the baseball game will be described. The processing flow of the pitching cursor movement system shown in FIG. 15 will also be described at the same time.
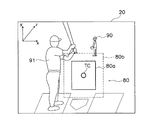
本野球ゲームでは、テレビジョンモニタ20に表示された投手キャラクタ90からボールが投球されるゲームが実現可能になっている。以下では、相手プレイヤが投手キャラクタ90に投球に関する命令をコントローラ17から指示する場合を例として説明を行うものとする。すなわち、プレイヤが攻撃側である場合を例として説明を行うものとする。なお、投手キャラクタ90に投球に関する命令がAI用プログラム(Artificial Intelligence用プログラム)から指示される場合もあるが、AI用プログラムから各種の命令が指示される場合も、ゲーム機1における内部的な処理は同様に行われる。
In this baseball game, a game in which a ball is thrown from a
野球ゲームプログラムがゲーム機1にロードされると、矩形状のストライクゾーン80aとストライクゾーン80aを取り囲むボールゾーン80bとからなる予想通過領域80の内部の座標データが、記録媒体10からRAM12に供給され格納される。このときに、予想通過領域80内の座標データがCPU7に認識される(S1)。そして、投手キャラクタ90に投球に関する命令を指示可能な状態になると、図3に示すように、予想通過領域80内のストライクゾーン80aの座標データに基づいて、ストライクゾーン80aを示す矩形状の枠画像が、画像データを用いてテレビジョンモニタ20に表示される。また、投手キャラクタ90に対応する画像データおよび打者キャラクタ91に対応する画像データが、テレビジョンモニタ20の所定の位置に表示される(S2)。ここでは、投手キャラクタ90が右投手であり、打者キャラクタ91が右打者である場合の例を示すものとする。さらに、投手キャラクタ90から投球されるボールの目標位置を報知するための投球カーソルTCをテレビジョンモニタ20に表示するための表示命令がCPU7から発行され、投球カーソルTC用の画像データがテレビジョンモニタ20の所定の位置たとえばストライクゾーンの中央部に表示される(S3)。この投球カーソルTCの位置を示す座標は、ゲームプログラムにおいて予め規定されており、初期状態のボールの目標通過位置Moの座標としてCPU7に認識される。ここでは、ボールの目標通過位置Moの座標は、投球カーソルTCの中心に規定されている。
When the baseball game program is loaded on the
この状態で、コントローラ17の上方向キー17U、下方向キー17D、左方向キー17Lおよび右方向キー17Rからなる十字ボタン17Bのいずれか1つのキーが操作されると、操作されたキーに対応する入力信号がコントローラ17からCPU7に発行され、この入力信号がCPU7に認識される。すると、この入力信号に対応する球種がCPU7に認識される(S4)。たとえば、コントローラ17の上方向キー17U、下方向キー17D、左方向キー17Lおよび右方向キー17Rそれぞれを個別に押すことにより、ストレート、シュート、フォーク、およびカーブのうちのいずれか1つの球種がCPU7に認識される。たとえば、コントローラ17の左方向キー17Lが押されると、ボールの球種としてカーブが選択される。すると、ボールの球種に対応する所定の第1速度データdv1(n)がCPU7に認識される。そして、ボールに作用する重力に対応した所定の第2速度データdv2(n)がCPU7に認識される(S5)。なお、ボールの球種としては、ストレート、シュート、フォーク、およびカーブ等が用意されている。また、操作されたキーすなわち操作されたキーに対応する入力信号と球種との対応は、ゲームプログラムにおいて予め規定されている。
In this state, when any one of the cross buttons 17B including the up key 17U, the down key 17D, the
続いて、コントローラ17の下方向キー17Dが操作されると、投手キャラクタ90に投球動作を開始させるための投球開始信号がコントローラ17から発行され、この投球開始信号に対応する投球開始命令がCPU7に認識される。すると、この投球開始命令がCPU7から発行され、テレビジョンモニタ20に表示された投手キャラクタ90が投球動作する状態が画像データを用いてテレビジョンモニタ20に表示される(S6)。この状態で、コントローラ17の左スティック17SLが操作されると、左スティック17SLの傾倒方向および傾倒量がCPU7に認識され、ボールの目標通過位置Moの初期位置の座標を左スティック17SLの傾倒方向に傾倒量だけ移動させる命令がCPU7から発行される。すると、投球カーソルTCが左スティック17SLの傾倒方向に傾倒量だけ移動する状態がテレビジョンモニタ20に表示される(S7)。そして、移動後の投球カーソルTCの位置座標すなわちボールの目標通過位置Moの座標がCPU7に認識される(S8)。たとえば、図4に示すように、コントローラ17の左スティック17SLが右斜め下に傾倒されると、投球カーソルTCがストライクゾーンの中央部から外角低めの方向に移動する。
Subsequently, when the down key 17D of the
続いて、投手キャラクタ90が投球動作している状態において、コントローラ17の下方向キー17Dが操作されると、投手キャラクタ90にボールをリリースさせるためのリリース信号がコントローラ17から発行され、このリリース信号に対応するリリース命令がCPU7に認識される。すると、このリリース命令がCPU7から発行され、テレビジョンモニタ20に表示された投手キャラクタ90からボールがリリースされる(S9)。すると、リリースされたボールの画像データがテレビジョンモニタ20に表示される。また、リリース命令がCPU7に認識されたときには、投手キャラクタ90からリリースされたボールのリリース位置Boを示す座標がCPU7に認識される(S10)。そして、投手キャラクタ90からリリースされたボールの初速度データVoおよび投手キャラクタ90からリリースされたボールの減速率データγがCPU7に認識される(S11)。なお、初速度データVoおよび減速率データγには所定の数値がCPU7により割り当てられている。これら初速度データVoおよび減速率データγは、ゲームプログラムのロード時に記録媒体10からRAM12に供給されRAM12に格納されている。
Subsequently, when the down key 17D of the
すると、図5に示すように、ボールのリリース位置Boを示す座標とボールの目標通過位置Moの座標とに基づいて、ボールのリリース位置Boからボールの目標通過位置Moまでの距離L1が、CPU7により算出される。このときに、この距離L1の数値が、距離データにCPU7により割り当てられCPU7に認識される。すると、リリースされたボールが予想通過領域80に到達するまでのフレーム数たとえば60フレームで距離L1を除算する処理(L/60)をCPU7に実行させることにより、単位フレームあたりの距離dL1がCPU7により算出されCPU7に認識される(S12)。ここで、リリースされたボールが予想通過領域80に到達するまでのフレーム数が60フレームである場合、リリースされたボールが予想通過領域80に到達するまでのボール移動時間が1secとなる。このボール移動時間の数値はCPU7によりボール移動時間データに割り当てられており、このボール移動時間データはRAM12に格納されている。
Then, as shown in FIG. 5, based on the coordinates indicating the ball release position Bo and the coordinates of the ball target passage position Mo, the distance L1 from the ball release position Bo to the ball target passage position Mo is determined by the
すると、単位フレームあたりの距離dL1を初速度Voで除算する処理(dL1/Vo)をCPU7に実行させることにより、第1フレームに対応する時間dT(1)を示す時間データが算出される。また、単位フレームあたりの距離dL1を初速度Voに減速率γを乗じた値(γXVo)で除算する処理をCPU7に実行させることにより、第2フレームに対応する時間dT(2)を示す時間データが算出される。さらに、単位フレームあたりの距離dL1を初速度Voに減速率γの2乗を乗じた値(γXγXVo)で除算する処理をCPU7に実行させることにより、第2フレームに対応する時間dT(2)を示す時間データが算出される。このように、単位フレームあたりの距離dL1を減速率γを考慮した初速度Voで除算する処理をCPU7に順次実行させることにより、第1フレームから第59フレームまでの各フレームに対応する時間dT(n)が算出される。そして、各フレームに対応する時間dT(n)がCPU7に認識される(S13)。なお、ここに示したnというパラメータには、「1」から「59」までの数値が割り当てられる。
Then, time data indicating the time dT (1) corresponding to the first frame is calculated by causing the
すると、第1速度データdv1(n)に時間dT(n)を乗じる処理をCPU7に実行させることにより単位フレームあたりの第1移動量dXi1(n)が算出され、この第1移動量dXi1がCPU7に認識される。また、第2速度データdv2(n)に時間dT(n)を乗じる処理をCPU7に実行させることにより第2移動量dXi2(n)が算出され、この第2移動量dXi2(n)がCPU7に認識される(S14)。たとえば、第1移動量dXi1(n)は、ボールの球種に対応した所定の第1速度データdv1(n)の各速度成分に時間dT(n)を乗じる処理をCPU7に実行させることにより、第1移動量dXi1(n)は算出される。また、ボールに作用する重力に対応した所定の第2速度データdv2(n)の各速度成分に時間dT(n)を乗じる処理をCPU7に実行させることにより、第2移動量dXi2(n)は算出される。
Then, the
たとえば、ボールの球種としては、ストレート、シュート、カーブ、およびフォーク等が用意されており、これらボールの球種それぞれに対応した所定の第1速度データdv1(dvx1,dvy1,0)および所定の第2速度データdv2(0,dvy2,0)がRAM12に格納されている。ここでは、ストレートの場合は、第1速度データのX成分(dvx1)およびY成分(dvy1)がゼロとしてCPU7に認識されており、第2速度データのY成分(dvy2)が値を有している。また、フォークの場合は、第1速度データのX成分(dvx1)がゼロとしてCPU7に認識されており、第1速度データのY成分(dvy1)および第2速度データのY成分(dvy2)が値を有している。また、シュートの場合は、第1速度データのY成分(dvy1)がゼロとしてCPU7に認識されており、第1速度データのX成分(dvx1)および第2速度データのY成分(dvy2)が値を有している。さらに、カーブの場合は、第1速度データおよび第2速度データが値を有している。これら所定の第1速度データdv1(n)および所定の第2速度データdv2(n)それぞれに時間dT(n)を乗じる処理をCPU7に実行させることにより、各フレームに対応する第1移動量dXi1(dxi1(=dvx1×dT),dyi1(=dvy1×dT),0)および第2移動量dXi2(0,dyi2(=dvy2×dT),0)が算出される。このようにして、ボールの回転状態を示す第1移動量dXi1(n)とボールに作用する重力の影響を示す第2移動量dXi2(n)とがCPU7により算出されCPU7に認識される。
For example, straight, chute, curve, fork and the like are prepared as ball types, and predetermined first velocity data dv1 (dvx1, dvy1, 0) and predetermined values corresponding to these ball types are prepared. Second speed data dv2 (0, dvy2, 0) is stored in the
続いて、図5に示すように、このリリース位置Boの座標と左スティック17SLにより指示された目標通過位置Moの座標とを通る第1初期軌道Ko1がCPU7により算出される。ここでは、リリース位置Boの座標と目標通過位置Moの座標とを直線で結んだ軌道が第1初期軌道Ko1としてCPU7に認識される。この第1初期軌道Ko1は、図6および図7に示すように、ボールの初速度データVo、ボールの減速率データγ、および時間データdT(n)に基づいて算出される。まず、リリース位置Boから目標通過位置Moに向かう方向のボールの初速度Voに時間dT(1)を乗じる計算をCPU7に実行させることにより、リリース位置Boからの第1差分移動量dXs(1)が算出される。この第1差分移動量dXs(1)のx’y’z’方向成分をリリース位置Boの座標に加算する計算をCPU7に実行させることにより、リリース位置Boに隣接する単位フレーム時間dT経過後の第1ボール位置B(1)の座標が算出される。次に、初速度Voに減速率γを乗じる計算をCPU7に実行させることにより、第1ボール位置B(1)における第1初期軌道用第1速度Vb1(=Vo×γ)が算出される。そして、第1初期軌道用第1速度Vb1に時間dT(2)を乗じる計算をCPU7に実行させることにより、第1ボール位置B(1)からの第2差分移動量dXs(2)が算出される。この第2差分移動量dXs(2)のx’y’z’方向成分を第1ボール位置B(1)の座標に加算する計算をCPU7に実行させることにより、第1ボール位置に隣接する単位フレームあたりの時間データdT経過後の第2ボール位置B(2)の座標が算出される。この計算を順次繰り返すことにより、第2ボール位置以降のボール位置B(n)の座標がCPU7により算出される。このようにして算出された各ボール位置B(n)の座標がCPU7に認識される。これにより、各ボール位置B(n)からなる第1初期軌道Ko1がCPU7に認識される(S15)。なお、図6は、第1初期軌道Ko1上の各ボール位置を原点とした局所座標系で速度の表示および座標の表示がなされている。
Subsequently, as shown in FIG. 5, the
続いて、図8に示すように、第1初期軌道Ko1上の各ボール位置B(n)の座標に単位フレームあたりの第1移動量dXi1(n)の各成分および単位フレームあたりの第2移動量dXi2(n)の各成分を加算する処理がCPU7により実行される。これにより、ボールの回転状態とボールに作用する重力の影響とが考慮された第1軌道K11を構成する各ボール位置B1(n)の座標(Xb1(n),Yb1(n),Zb1(n))が算出される。このときに、各ボール位置B1(n)の座標がCPU7に認識され、図9に示すように、これらボール位置B1(n)を結んだボールの第1軌道K11がCPU7に認識される(S16)。すると、第1軌道K11と予想通過領域80との交点となる座標がCPU7により算出され、この交点の座標が第1通過位置To1の座標(Xt1,Yt1,Zt1)としてCPU7に認識される(S17)。たとえば、予想通過領域80の座標に一致する第1軌道K11のボール位置の座標をCPU7に算出させることにより、第1軌道K11と予想通過領域80との交点となる座標が算出され、この交点の座標が第1通過位置To1の座標(Xt1,Yt1,Zt1)としてCPU7に認識される。このようにして、第1通過位置To1の座標がCPU7に認識されると、リリース位置Boの座標と第1通過位置To1の座標との間における第1軌道K11により規定される各ボール位置の座標すなわち第1移動位置B1(n)の座標がCPU7に認識される(S18)。なお、図8は、第1初期軌道Ko1上の各ボール位置を原点とした局所座標系で座標の表示がなされている。
Subsequently, as shown in FIG. 8, each component of the first movement amount dXi1 (n) per unit frame and the second movement per unit frame at the coordinates of each ball position B (n) on the first initial trajectory Ko1. The
続いて、リリース位置Boの座標と第1移動位置B1(n)の座標とを予想通過領域80に投影する計算がCPU7により実行される。ここでは、リリース位置BoのZ座標と第1移動位置B1(n)のZ座標とを予想通過領域80が位置するZ座標(Zb1)に修正する計算をCPU7に実行させることにより、図10に示すように、リリース位置BoのXY座標と第1移動位置B1(n)のXY座標とが予想通過領域80に投影される。すなわち、リリース位置Boの座標と第1移動位置B1(n)の座標とが予想通過領域80に等倍で投影される。このようにして、予想通過領域80すなわち所定のZ座標(Zb1)の位置における、リリース位置Boに対応するX座標およびY座標と第1移動位置B1(n)に対応するX座標およびY座標とがCPU7により算出され、これらの座標(Xb1(n),Yb1(n),Zb1)が、ボールの第1予想通過位置YB1(n)の座標としてCPU7に認識される(S19)。なお、ここでは、リリース位置Boに対応する投影座標は、(Xb1(0),Yb1(0),Zb1)としている。
Subsequently, the
すると、隣接する第1予想通過位置のうちの一方の第1予想通過位置YB1(n+1)の座標(Xb1(n+1),Yb1(n+1),Zb1)から隣接する第1予想通過位置のうちの他方の第1予想通過位置YB1(n)の座標(Xb1(n),Yb1(n),Zb1)を減算する処理をCPU7に実行させることにより、隣接する第1予想通過位置の一方と隣接する第1予想通過位置の他方との間の変化量dYB1(dxj1(n),dyj2(n),0)が算出される。また、第1通過位置To1の座標(Xt1,Yt1,Zt1)から第1通過位置To1に隣接する第1予想通過位置YB1(59)の座標(Xb1(59),Yb1(59),Zb1)を減算する処理をCPU7に実行させることにより、第1通過位置To1と第1通過位置To1に隣接する第1予想通過位置YB1(59)との間の変化量dYB1が算出される。このようにして算出された変化量dYB1すなわち位置変化量dYB1(dxj1(n),dyj2(n),0)がCPU7に認識される。そして、算出された位置変化量dYB1に対して所定の係数たとえば0.3を乗じる処理をCPU7に実行させることにより、位置変化量dYB1が所定の割合で変更され、変更された位置変化量dYB1’(=0.3XdYB1)がCPU7に認識される(S20)。
Then, the other of the first predicted passing positions adjacent from the coordinates (Xb1 (n + 1), Yb1 (n + 1), Zb1) of one first predicted passing position YB1 (n + 1) of the adjacent first predicted passing positions. The
ここで、位置変化量dYB1を所定の割合で変更するという処理は、以下のような意味を持つ。たとえば、図10に示すように、たとえば第1通過位置To1の座標を基点として、リリース位置Bo側の第1予想通過位置YB1(n:n<60)において、変更された位置変化量dYB1’(=0.3XdYB1)を第1通過位置To1の座標から順次減算する計算がCPU7により実行されると、第1通過位置To1の座標を基点として、リリース位置Boから第1通過位置To1までの各位置に対応する第1予想通過位置YB1を所定の割合で移動させることができる。すなわち、予想通過領域において、リリース位置Boに対応する第1予想通過位置YB1から第1通過位置To1までのボールの移動軌跡を、第1通過位置To1を基点として所定の割合で縮小することができる。
Here, the process of changing the position change amount dYB1 at a predetermined rate has the following meaning. For example, as shown in FIG. 10, for example, the position change amount dYB1 ′ changed at the first expected passing position YB1 (n: n <60) on the release position Bo side with the coordinates of the first passing position To1 as a base point. = 0.3XdYB1) is sequentially subtracted from the coordinates of the first passage position To1, the
続いて、リリース位置Boの座標と第1通過位置To1の座標とを初期条件として、ボールの第2初期軌道Ko2がCPU7により算出され、この第2初期軌道Ko2がCPU7に認識される(S21)。たとえば、図11に示すように、リリース位置Boの座標と第1通過位置To1の座標とを直線で結んだ軌道が第2初期軌道Ko2としてCPU7に認識される。この第2初期軌道Ko2は、第1初期軌道Ko1と同様に、ボールの初速度データVo、ボールの減速率データγ、および時間データdT(n)に基づいて算出される(図6および図7を参照)。まず、リリース位置Boから第1通過位置To1に向かう方向のボールの初速度Voに時間dT(1)を乗じる計算をCPU7に実行させることにより、リリース位置Boからの第1差分移動量dXs’(1)が算出される。この第1差分移動量dXs’(1)のx’y’z’方向成分をリリース位置Boの座標に加算する計算をCPU7に実行させることにより、リリース位置Boに隣接する単位フレーム時間dT経過後の第1ボール位置B’(1)の座標が算出される。次に、初速度Voに減速率γを乗じる計算をCPU7に実行させることにより、第1ボール位置B’(1)における第2初期軌道用第1速度Vb1’(=Vo×γ)が算出される。そして、第2初期軌道用第1速度Vb1’に時間dT(2)を乗じる計算をCPU7に実行させることにより、第1ボール位置B’(1)からの第2差分移動量dXs’(2)が算出される。この第2差分移動量dXs’(2)のx’y’z’方向成分を第1ボール位置B’(1)の座標に加算する計算をCPU7に実行させることにより、第1ボール位置に隣接する単位フレームあたりの時間データdT経過後の第2ボール位置B’(2)の座標が算出される。この計算を順次繰り返すことにより、第2ボール位置以降のボール位置B’(n)の座標がCPU7により算出される。このようにして算出された各ボール位置B’(n)の座標がCPU7に認識される。これにより、各ボール位置B’(n)からなる第2初期軌道Ko2がCPU7に認識される。
Subsequently, using the coordinates of the release position Bo and the coordinates of the first passing position To1 as initial conditions, the second initial trajectory Ko2 of the ball is calculated by the
続いて、図12に示すように、第2初期軌道Ko2上の各ボール位置B’(n)の座標に位置変化量dYB1’(dxj1’(n),dyj2’(n),0)を加算する処理がCPU7により実行される。これにより、位置変化量dYB1’で変化するボールの第2軌道K21を構成する各ボール位置B2(n)の座標が算出される(S22)。すると、各ボール位置B2(n)の座標がボールの移動位置としてCPU7に認識され、これらボールの移動位置B2(n)を結んだボールの第2軌道K21がCPU7に認識される(S23)。すると、図13に示すように、第2軌道K21と予想通過領域80との交点となる座標がCPU7により算出される。たとえば、予想通過領域80の座標に一致する第2軌道K21のボール位置B2(n)の座標をCPU7に算出させることにより、第2軌道K21と予想通過領域80との交点となる座標が算出され、この交点の座標が最終通過位置Sの座標としてCPU7に認識される(S24)。
Subsequently, as shown in FIG. 12, the position change amount dYB1 ′ (dxj1 ′ (n), dyj2 ′ (n), 0) is added to the coordinates of each ball position B ′ (n) on the second initial trajectory Ko2. The
続いて、リリース位置Boの座標と最終通過位置Sの座標との間における第2軌道K21により規定されるボールの移動位置B2(n)の座標がCPU7に認識される。すると、最終通過位置Sの座標を基点として、リリース位置Boを予想通過領域80に投影した座標が目標通過位置Moの座標になるように、リリース位置Boの座標と移動位置B2(n)の座標とを予想通過領域80に投影する計算がCPU7により実行される。これにより、予想通過領域80における、第2軌道K21上のリリース位置Boおよび移動位置B2(n)に対応する予想通過位置YB2(n)がCPU7により算出され、この予想通過位置YB2(n)がCPU7に認識される(S25)。この場合、リリース位置Boに対応する予想通過位置YB2(n)が目標通過位置Moに一致し、移動位置B2(n)に対応する予想通過位置YB2(n)は目標通過位置Moと最終通過位置Sとの間に位置することになる。
Subsequently, the
たとえば、まず、リリース位置BoのZ座標と移動位置B2(n)のZ座標とを予想通過領域80が規定されたZ座標(Zb1)に修正する計算をCPU7に実行させる。次に、目標通過位置MoのX座標をリリース位置Boに対応する予想通過位置YB2(0)のX座標で除算する処理をCPU7に実行させる。そして、目標通過位置MoのY座標をリリース位置Boに対応する予想通過位置YB2(0)のY座標で除算する処理をCPU7に実行させる。このようにして求められた結果すなわち目標通過位置Moと予想通過位置YB2(0)との比率を予想通過位置YB2(n:n=1〜59)に乗じる計算をCPU7に実行させることにより、予想通過領域80における、第2軌道K21上のリリース位置Boおよび移動位置B2(n)に対応する予想通過位置YB2(n)が算出され、この予想通過位置YB2(n)がCPU7に認識される。
For example, first, the
最後に、予想通過位置YB2(n)の座標および最終通過位置Sの座標がCPU7に認識されると、報知画像たとえばボール形状の画像に対応する画像データが、予想通過位置YB2(n)の座標および最終通過位置Sの各座標に基づいて、リリース位置Boに対応する予想通過位置YB2(0)、移動位置B2(n:n=1〜59)に対応する予想通過位置YB2(n:n=1〜59)、最終通過位置Sに、CPU7により順次割り当てられる。すると、ボールを表現した画像をテレビジョンモニタ20に表示するための表示命令がCPU7から連続的に発行される。すると、図14に示すように、報知画像用の画像データが、リリース位置Boに対応する予想通過位置YB2(0)、移動位置B2(n:n=1〜59)に対応する予想通過位置YB2(n:n=1〜59)、最終通過位置Sの順にテレビジョンモニタ20に連続的に表示される(S26)。
Finally, when the coordinates of the predicted passing position YB2 (n) and the coordinates of the final passing position S are recognized by the
〔他の実施形態〕
(a) 前記実施形態では、ゲームプログラムを適用しうるコンピュータの一例としての家庭用ビデオゲーム装置を用いた場合の例を示したが、ゲーム装置は、前記実施形態に限定されず、モニタが別体に構成されたゲーム装置、モニタが一体に構成されたゲーム装置、ゲームプログラムを実行することによってゲーム装置として機能するパーソナルコンピュータやワークステーションなどにも同様に適用することができる。
[Other Embodiments]
(A) In the above embodiment, an example of using a home video game apparatus as an example of a computer to which a game program can be applied has been described. However, the game apparatus is not limited to the above embodiment, and a monitor is separately provided. The present invention can be similarly applied to a game device configured in a body, a game device in which a monitor is integrated, a personal computer or a workstation that functions as a game device by executing a game program.
(b) 本発明には、前述したようなゲームを実行するプログラムおよびこのプログラムを記録したコンピュータ読み取り可能な記録媒体も含まれる。この記録媒体としては、カートリッジ以外に、たとえば、コンピュータ読み取り可能なフレキシブルディスク、半導体メモリ、CD−ROM、DVD、MO、ROMカセット、その他のものが挙げられる。 (B) The present invention includes a program for executing the game as described above and a computer-readable recording medium on which the program is recorded. Examples of the recording medium include a computer-readable flexible disk, a semiconductor memory, a CD-ROM, a DVD, an MO, a ROM cassette, and the like in addition to the cartridge.
1 制御部
3 画像表示部
5 操作入力部
7 CPU
17 コントローラ
20 テレビジョンモニタ
50 予想通過領域認識手段
51 球種選択手段
52 投球開始命令認識手段
53 目標通過位置認識手段
54 リリース命令認識手段
55 リリース位置認識手段
56 移動量認識手段
57 第1軌道認識手段
58 第1通過位置認識手段
59 第1移動位置認識手段
60 第1予想通過位置認識手段
61 位置変化量認識手段
62 位置変化量変更手段
63 変更通過位置認識手段
64 第2軌道認識手段
65 最終通過位置認識手段
66 移動位置認識手段
67 予想通過位置認識手段
68 画像データ割当手段
69 画像表示手段
80 予想通過領域
90 投手キャラクタ
Mo 目標通過位置
Bo リリース位置(送出位置)
K11 第1軌道
To1 第1通過位置
K21 第2軌道
S 最終通過位置
B1 第1移動位置
B2 移動位置
YB1 第1予想通過位置
YB2 予想通過位置
dYB1,dYB1’ 位置変化量
dXi1 第1移動量
dXi2 第2移動量
Ko1 第1初期軌道
Ko2 第2初期軌道
DESCRIPTION OF
17
K11 first trajectory To1 first pass position K21 second trajectory S final pass position B1 first move position B2 move position YB1 first expected pass position YB2 expected pass position dYB1, dYB1 'position change amount dXi1 first move amount dXi2 second Travel amount Ko1 first initial trajectory Ko2 second initial trajectory
Claims (8)
前記キャラクタから送出される前記移動体の予想通過領域を認識する予想通過領域認識機能と、
前記キャラクタから送出される前記移動体の目標通過位置を認識する目標通過位置認識機能と、
前記移動体を前記キャラクタに送出させるための送出命令を認識する送出命令認識機能と、
前記送出命令が制御部に認識されたときに前記移動体の送出位置を認識する送出位置認識機能と、
前記送出位置および前記目標通過位置を初期条件として前記移動体の第1軌道を算出し、前記第1軌道を認識する第1軌道認識機能と、
前記第1軌道と前記予想通過領域との交点を算出し、前記交点を前記移動体の第1通過位置として認識する第1通過位置認識機能と、
前記送出位置および前記第1通過位置を初期条件として前記第1軌道上の前記移動体の変化量に対応する前記予想通過領域における前記移動体の変化量に基づいて前記移動体の第2軌道を算出し、前記第2軌道を認識する第2軌道認識機能と、
前記第2軌道と前記予想通過領域との交点を算出し、前記交点を前記移動体の最終通過位置として認識する最終通過位置認識機能と、
前記送出位置と前記最終通過位置との間における前記第2軌道上の前記移動体の移動位置を認識する移動位置認識機能と、
前記送出位置と前記移動位置とに対応する前記予想通過領域における前記移動体の予想通過位置を算出し、前記予想通過位置を認識する予想通過位置認識機能と、
前記移動体の通過位置を報知するための報知画像に対応する画像データを前記予想通過位置および前記最終通過位置に割り当てる処理を実行する画像データ割当機能と、
前記報知画像を前記画像データを用いて画像表示部に連続的に表示する画像表示機能と、
を実現させるためのゲームプログラム。 To a computer capable of realizing a game in which a moving object is sent from a character displayed on the image display unit,
An expected passage area recognition function for recognizing an expected passage area of the moving body transmitted from the character;
A target passing position recognition function for recognizing a target passing position of the moving body sent from the character;
A sending command recognition function for recognizing a sending command for sending the moving body to the character;
A sending position recognition function for recognizing the sending position of the moving body when the sending command is recognized by the control unit;
A first trajectory recognition function for recognizing the first trajectory by calculating a first trajectory of the moving body using the sending position and the target passing position as initial conditions;
A first passing position recognition function for calculating an intersection between the first trajectory and the predicted passing area, and recognizing the intersection as a first passing position of the moving body;
Based on the amount of change of the moving body in the expected passing region corresponding to the amount of change of the moving body on the first trajectory with the sending position and the first passing position as initial conditions, A second trajectory recognition function for calculating and recognizing the second trajectory;
Calculating a point of intersection between the second trajectory and the predicted passing region, and recognizing the point of intersection as a final passing position of the moving body;
A moving position recognition function for recognizing a moving position of the moving body on the second trajectory between the sending position and the final passing position;
An expected passing position recognition function for calculating the expected passing position of the moving body in the expected passing area corresponding to the sending position and the moving position, and recognizing the expected passing position;
An image data assignment function for executing processing for assigning image data corresponding to a notification image for notifying the passage position of the mobile body to the expected passage position and the final passage position;
An image display function for continuously displaying the notification image on the image display unit using the image data;
A game program to make it happen.
前記送出位置と前記第1通過位置との間における前記第1軌道上の前記移動体の第1移動位置を認識する第1移動位置認識機能と、
前記送出位置と前記第1移動位置とに対応する前記予想通過領域における前記移動体の第1予想通過位置を算出し、前記第1予想通過位置を認識する第1予想通過位置認識機能と、
隣接する前記第1予想通過位置の間と前記第1予想通過位置および前記第1通過位置の間との位置変化量を算出し、前記位置変化量を認識する位置変化量認識機能と、
をさらに実現させ、
前記第2軌道認識機能においては、前記送出位置および前記第1通過位置を初期条件として前記位置変化量で変化する前記移動体の第2軌道が制御部により算出され、前記第2軌道が制御部に認識される、
請求項1に記載のゲームプログラム。 In the computer,
A first movement position recognition function for recognizing a first movement position of the movable body on the first trajectory between the delivery position and the first passage position;
A first expected passing position recognition function for calculating the first expected passing position of the moving body in the expected passing area corresponding to the sending position and the first moving position, and recognizing the first expected passing position;
A position change amount recognition function for calculating a position change amount between the adjacent first expected pass positions and between the first expected pass position and the first pass position, and recognizing the position change amount;
Further realized,
In the second trajectory recognition function, a second trajectory of the moving body that changes by the position change amount is calculated by the control unit using the sending position and the first passing position as initial conditions, and the second trajectory is calculated by the control unit. Recognized by the
The game program according to claim 1.
前記位置変化量を所定の割合で変更する処理を実行する位置変化量変更機能と、
変更された前記位置変化量に基づいて前記第1通過位置を基点として前記第1予想通過位置を修正する計算を実行し、修正された前記第1予想通過位置を認識する変更通過位置認識機能と、
をさらに実現させる請求項2に記載のゲームプログラム。 In the computer,
A position change amount changing function for executing a process of changing the position change amount at a predetermined rate;
A changed passage position recognition function that executes a calculation for correcting the first predicted passage position based on the changed amount of the position change and uses the first passage position as a base point to recognize the corrected first predicted passage position ; ,
The game program according to claim 2, further realizing the above.
前記移動体の回転態様に対応した第1移動量と前記移動体に作用する重力に対応した第2移動量とを認識する移動量認識機能、
をさらに実現させ、
前記第1軌道認識機能においては、前記送出位置と前記目標通過位置とを通る初期軌道を前記第1移動量および前記第2移動量に基づいて修正する計算を実行することにより前記移動体の第1軌道が制御部により算出され、前記第1軌道が制御部に認識される、
請求項2又は3に記載のゲームプログラム。 In the computer,
A movement amount recognition function for recognizing a first movement amount corresponding to a rotation mode of the moving body and a second movement amount corresponding to gravity acting on the moving body;
Further realized,
In the first trajectory recognition function, the first trajectory of the moving body is calculated by executing a calculation for correcting an initial trajectory passing through the sending position and the target passing position based on the first movement amount and the second movement amount. One trajectory is calculated by the control unit, and the first trajectory is recognized by the control unit;
The game program according to claim 2 or 3.
請求項2から4のいずれかに記載のゲームプログラム。 In the first expected passing position recognition function, the first expected passing position of the moving body is calculated by performing a calculation for projecting the sending position and the first moving position on the first trajectory onto the expected passing area. Is calculated by the control unit, and the first predicted passing position is recognized by the control unit.
The game program according to claim 2.
請求項1から5のいずれかに記載のゲームプログラム。 In the predicted passing position recognition function, the predicted passing of the moving body is performed by executing a calculation for projecting the sending position and the moving position on the second trajectory onto the predicted passing area with the final passing position as a base point. The position is calculated by the control unit, and the predicted passing position is recognized by the control unit.
The game program according to any one of claims 1 to 5.
前記キャラクタから送出される前記移動体の予想通過領域を認識する予想通過領域認識手段と、
前記キャラクタから送出される前記移動体の目標通過位置を認識する目標通過位置認識手段と、
前記移動体を前記キャラクタに送出させるための送出命令を認識する送出命令認識手段と、
前記送出命令が制御部に認識されたときに前記移動体の送出位置を認識する送出位置認識手段と、
前記送出位置および前記目標通過位置を初期条件として前記移動体の第1軌道を算出し、前記第1軌道を認識する第1軌道認識手段と、
前記第1軌道と前記予想通過領域との交点を算出し、前記交点を前記移動体の第1通過位置として認識する第1通過位置認識手段と、
前記送出位置および前記第1通過位置を初期条件として前記第1軌道上の前記移動体の変化量に対応する前記予想通過領域における前記移動体の変化量に基づいて前記移動体の第2軌道を算出し、前記第2軌道を認識する第2軌道認識手段と、
前記第2軌道と前記予想通過領域との交点を算出し、前記交点を前記移動体の最終通過位置として認識する最終通過位置認識手段と、
前記送出位置と前記最終通過位置との間における前記第2軌道上の前記移動体の移動位置を認識する移動位置認識手段と、
前記送出位置と前記移動位置とに対応する前記予想通過領域における前記移動体の予想通過位置を算出し、前記予想通過位置を認識する予想通過位置認識手段と、
前記移動体の通過位置を報知するための報知画像に対応する画像データを前記予想通過位置および前記最終通過位置に割り当てる処理を実行する画像データ割当手段と、
前記報知画像を前記画像データを用いて画像表示部に連続的に表示する画像表示手段と、
を備えるゲーム装置。 A game device capable of executing a game in which a moving object is sent from a character displayed on an image display unit,
Expected passage area recognition means for recognizing the expected passage area of the moving body sent from the character;
Target passage position recognition means for recognizing the target passage position of the moving body sent from the character;
Sending command recognition means for recognizing a sending command for sending the moving body to the character;
Sending position recognition means for recognizing the sending position of the moving body when the sending command is recognized by the control unit;
First trajectory recognition means for calculating the first trajectory of the moving body using the sending position and the target passing position as initial conditions, and recognizing the first trajectory;
Calculating a point of intersection between the first trajectory and the predicted passage region, and a first passage position recognition means for recognizing the intersection point as a first passage position of the moving body;
Based on the amount of change of the moving body in the expected passing region corresponding to the amount of change of the moving body on the first trajectory with the sending position and the first passing position as initial conditions, Second trajectory recognition means for calculating and recognizing the second trajectory;
Calculating a point of intersection between the second trajectory and the predicted passing region, and a final passing position recognizing unit for recognizing the crossing point as a final passing position of the moving body
A moving position recognition means for recognizing a moving position of the moving body on the second trajectory between the sending position and the final passing position;
An expected passage position recognition means for calculating an expected passage position of the moving body in the expected passage area corresponding to the sending position and the movement position, and recognizing the expected passage position;
Image data allocating means for executing processing for allocating image data corresponding to a notification image for notifying a passing position of the moving body to the expected passing position and the final passing position;
Image display means for continuously displaying the notification image on the image display unit using the image data;
A game device comprising:
前記キャラクタから送出される前記移動体の予想通過領域を認識する予想通過領域認識ステップと、
前記キャラクタから送出される前記移動体の目標通過位置を認識する目標通過位置認識ステップと、
前記移動体を前記キャラクタに送出させるための送出命令を認識する送出命令認識ステップと、
前記送出命令が制御部に認識されたときに前記移動体の送出位置を認識する送出位置認識ステップと、
前記送出位置および前記目標通過位置を初期条件として前記移動体の第1軌道を算出し、前記第1軌道を認識する第1軌道認識ステップと、
前記第1軌道と前記予想通過領域との交点を算出し、前記交点を前記移動体の第1通過位置として認識する第1通過位置認識ステップと、
前記送出位置および前記第1通過位置を初期条件として前記第1軌道上の前記移動体の変化量に対応する前記予想通過領域における前記移動体の変化量に基づいて前記移動体の第2軌道を算出し、前記第2軌道を認識する第2軌道認識ステップと、
前記第2軌道と前記予想通過領域との交点を算出し、前記交点を前記移動体の最終通過位置として認識する最終通過位置認識ステップと、
前記送出位置と前記最終通過位置との間における前記第2軌道上の前記移動体の移動位置を認識する移動位置認識ステップと、
前記送出位置と前記移動位置とに対応する前記予想通過領域における前記移動体の予想通過位置を算出し、前記予想通過位置を認識する予想通過位置認識ステップと、
前記移動体の通過位置を報知するための報知画像に対応する画像データを前記予想通過位置および前記最終通過位置に割り当てる処理を実行する画像データ割当ステップと、
前記報知画像を前記画像データを用いて画像表示部に連続的に表示する画像表示ステップと、
を備えるゲーム制御方法。 A game control method for controlling a game in which a moving object is sent from a character displayed on an image display unit by a computer,
An expected passage area recognition step for recognizing an expected passage area of the moving body sent from the character;
A target passing position recognition step for recognizing a target passing position of the moving body sent from the character;
A sending command recognition step for recognizing a sending command for sending the moving body to the character;
A sending position recognition step for recognizing the sending position of the mobile body when the sending command is recognized by the control unit;
A first trajectory recognition step of calculating a first trajectory of the moving body using the sending position and the target passing position as initial conditions, and recognizing the first trajectory;
A first passing position recognition step of calculating an intersection between the first trajectory and the predicted passing area, and recognizing the intersection as a first passing position of the moving body;
Based on the amount of change of the moving body in the expected passing region corresponding to the amount of change of the moving body on the first trajectory with the sending position and the first passing position as initial conditions, A second trajectory recognition step for calculating and recognizing the second trajectory;
Calculating a point of intersection between the second trajectory and the predicted passing region, and recognizing the point of intersection as a final passing position of the moving body; and
A moving position recognition step for recognizing a moving position of the moving body on the second trajectory between the sending position and the final passing position;
An expected passing position recognition step of calculating the expected passing position of the moving body in the expected passing area corresponding to the sending position and the moving position, and recognizing the expected passing position;
An image data assignment step for executing a process of assigning image data corresponding to a notification image for notifying a passage position of the mobile body to the expected passage position and the final passage position;
An image display step of continuously displaying the notification image on the image display unit using the image data;
A game control method comprising:
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006073384A JP3965198B1 (en) | 2006-03-16 | 2006-03-16 | GAME PROGRAM, GAME DEVICE, AND GAME CONTROL METHOD |
| KR1020087024928A KR101028336B1 (en) | 2006-03-16 | 2006-11-27 | Computer readable medium on which game program is recorded, game device, and game control method |
| PCT/JP2006/323540 WO2007108174A1 (en) | 2006-03-16 | 2006-11-27 | Game program, game device, and game control method |
| TW095147963A TW200738306A (en) | 2006-03-16 | 2006-12-20 | Game program, game device, and game control method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006073384A JP3965198B1 (en) | 2006-03-16 | 2006-03-16 | GAME PROGRAM, GAME DEVICE, AND GAME CONTROL METHOD |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP3965198B1 true JP3965198B1 (en) | 2007-08-29 |
| JP2007244695A JP2007244695A (en) | 2007-09-27 |
Family
ID=38498649
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006073384A Active JP3965198B1 (en) | 2006-03-16 | 2006-03-16 | GAME PROGRAM, GAME DEVICE, AND GAME CONTROL METHOD |
Country Status (4)
| Country | Link |
|---|---|
| JP (1) | JP3965198B1 (en) |
| KR (1) | KR101028336B1 (en) |
| TW (1) | TW200738306A (en) |
| WO (1) | WO2007108174A1 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011182929A (en) * | 2010-03-08 | 2011-09-22 | Konami Digital Entertainment Co Ltd | Game program, game device, and game control method |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6696656B1 (en) * | 2019-07-29 | 2020-05-20 | 株式会社コナミデジタルエンタテインメント | Program, game control method, and game device |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4955873B2 (en) * | 2001-09-07 | 2012-06-20 | 株式会社バンダイナムコゲームス | Program, information storage medium, and game device |
| JP3789919B2 (en) * | 2004-02-19 | 2006-06-28 | コナミ株式会社 | GAME PROGRAM, GAME DEVICE, AND GAME METHOD |
-
2006
- 2006-03-16 JP JP2006073384A patent/JP3965198B1/en active Active
- 2006-11-27 KR KR1020087024928A patent/KR101028336B1/en active IP Right Grant
- 2006-11-27 WO PCT/JP2006/323540 patent/WO2007108174A1/en active Application Filing
- 2006-12-20 TW TW095147963A patent/TW200738306A/en not_active IP Right Cessation
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011182929A (en) * | 2010-03-08 | 2011-09-22 | Konami Digital Entertainment Co Ltd | Game program, game device, and game control method |
Also Published As
| Publication number | Publication date |
|---|---|
| KR20080114797A (en) | 2008-12-31 |
| TWI316866B (en) | 2009-11-11 |
| WO2007108174A1 (en) | 2007-09-27 |
| TW200738306A (en) | 2007-10-16 |
| KR101028336B1 (en) | 2011-04-11 |
| JP2007244695A (en) | 2007-09-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3789919B2 (en) | GAME PROGRAM, GAME DEVICE, AND GAME METHOD | |
| JP2009207780A (en) | Game program, game machine and game control method | |
| JP4536098B2 (en) | GAME PROGRAM, GAME DEVICE, AND GAME CONTROL METHOD | |
| JP3892889B1 (en) | GAME PROGRAM, GAME DEVICE, AND GAME CONTROL METHOD | |
| JP4463289B2 (en) | GAME PROGRAM, GAME DEVICE, AND GAME CONTROL METHOD | |
| JP4521020B2 (en) | GAME PROGRAM, GAME DEVICE, AND GAME CONTROL METHOD | |
| JP3735358B2 (en) | Video game program, video game apparatus, and video game method | |
| JP3924584B1 (en) | GAME PROGRAM, GAME DEVICE, AND GAME CONTROL METHOD | |
| JP3965198B1 (en) | GAME PROGRAM, GAME DEVICE, AND GAME CONTROL METHOD | |
| JP4164101B2 (en) | GAME PROGRAM, GAME DEVICE, AND GAME CONTROL METHOD | |
| JP4543054B2 (en) | GAME PROGRAM, GAME DEVICE, AND GAME CONTROL METHOD | |
| JP4205118B2 (en) | GAME PROGRAM, GAME DEVICE, AND GAME CONTROL METHOD | |
| JP2007159817A (en) | Game program, game device and game method | |
| WO2007029405A1 (en) | Game program, game device, and game method | |
| JP4115487B2 (en) | GAME PROGRAM, GAME DEVICE, AND GAME CONTROL METHOD | |
| JP4122030B2 (en) | GAME PROGRAM, GAME DEVICE, AND GAME METHOD | |
| JP2007190166A (en) | Video game program, video game device and video game control method | |
| JP4772079B2 (en) | GAME PROGRAM, GAME DEVICE, AND GAME CONTROL METHOD | |
| JP4182128B2 (en) | GAME PROGRAM, GAME DEVICE, AND GAME CONTROL METHOD | |
| JP4589936B2 (en) | GAME PROGRAM, GAME DEVICE, AND GAME CONTROL METHOD | |
| JP5315274B2 (en) | GAME PROGRAM, GAME DEVICE, GAME CONTROL METHOD | |
| JP2010125119A (en) | Game program, game machine, and game control method | |
| JP2011172734A (en) | Game program, game device, and game control method | |
| JP2008245729A (en) | Game program, game device, and game control method | |
| JP2007313018A (en) | Game program, game device and game control method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20070522 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20070525 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 3965198 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110601 Year of fee payment: 4 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110601 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120601 Year of fee payment: 5 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130601 Year of fee payment: 6 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130601 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140601 Year of fee payment: 7 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |