JP3833254B2 - 自己始動ブラシレス電気モータ - Google Patents
自己始動ブラシレス電気モータ Download PDFInfo
- Publication number
- JP3833254B2 JP3833254B2 JP53640896A JP53640896A JP3833254B2 JP 3833254 B2 JP3833254 B2 JP 3833254B2 JP 53640896 A JP53640896 A JP 53640896A JP 53640896 A JP53640896 A JP 53640896A JP 3833254 B2 JP3833254 B2 JP 3833254B2
- Authority
- JP
- Japan
- Prior art keywords
- pole
- poles
- motor
- reluctance
- permanent magnet
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images

































Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/22—Rotating parts of the magnetic circuit
- H02K1/24—Rotor cores with salient poles ; Variable reluctance rotors
- H02K1/246—Variable reluctance rotors
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K19/00—Synchronous motors or generators
- H02K19/02—Synchronous motors
- H02K19/04—Synchronous motors for single-phase current
- H02K19/06—Motors having windings on the stator and a variable-reluctance soft-iron rotor without windings, e.g. inductor motors
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K21/00—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets
- H02K21/12—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with stationary armatures and rotating magnets
- H02K21/14—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with stationary armatures and rotating magnets with magnets rotating within the armatures
- H02K21/16—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with stationary armatures and rotating magnets with magnets rotating within the armatures having annular armature cores with salient poles
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K21/00—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets
- H02K21/38—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with rotating flux distributors, and armatures and magnets both stationary
- H02K21/44—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with rotating flux distributors, and armatures and magnets both stationary with armature windings wound upon the magnets
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K29/00—Motors or generators having non-mechanical commutating devices, e.g. discharge tubes or semiconductor devices
- H02K29/03—Motors or generators having non-mechanical commutating devices, e.g. discharge tubes or semiconductor devices with a magnetic circuit specially adapted for avoiding torque ripples or self-starting problems
Description
自己始動ブラシレス電気モータは、単一極性の直流パルスまたは交流の極性の供給を受けることができる。適度の軸動を備えるモータが電子的に供給を受けるとき、直流パルスの供給では、最小数の電子スイッチが用いられるためモータおよび供給エレクトロニクスについてのシステムコストは最低となる。他方、より大きな動力に対しては、モータの供給エレクトロニクスにおける電子スイッチの数をとにかく増加させねばならないときには、モータに交流極性を与えて両半周期中電力がモータに供給されるようにし、より均一的なトルクの成長を可能にし、かつ巻線における導電損失を減じることが有利であろう。
単一ストランドのブラシレスモータは、単一の外部電流源からの供給を受け、互いに関し回転可能さもなければ移動可能な2つ以上の部分のうち一方に設けられた巻線を1つのみ有する。このようなモータは自己始動であることが可能であり、すなわち、停止時に予め定められた方向、優先始動方向に、もしこの始動方向がモータの設計において固有のものであるならば、駆動トルクを成長させることができる。優先方向における自己始動は、たとえば非対称の突極および/または非対称の永久磁石極により軟磁性鉄心に非対称を設けることにより、またはたとえば既知のくま取りコイル形モータにおける短絡電流経路といったように、補助巻線に外部電流源への接続を与えないことにより、モータに組込むことが可能である。こうした電流経路は、こうした電流経路に接続された変化する磁界の影響下でのみ電流を伝えることができる。モータの静止時に電流がこのような電流経路を流れるためには、外部電流源に接続された巻線にパルス電流または交流を供給しなければならない。
理論上は、補助巻線は設けられていないがモータの巻線にエネルギが供給されていないときでさえいかなる回転位置においてもトルクを発することができるモータは常に、永久磁石極を含まねばならないことを示すことが可能である。
以下における記載は、巻線を備え以下で固定子と呼ばれる第1の部分と、固定子内部に配置され固定子に関連して回転可能な、以下で回転子と呼ばれる第2の部分とを有する、回転運動のためのモータに限定される。しかしながら、これら2つの部分の場所を交換することが可能であり、固定子を回転子から分離するエアギャップは円柱形である必要はなく均等に平坦であるかまたは円錐形でもよく、モータの上記部分間の相対運動は回転である必要はなく、均等に線形的であるかまたは回転および線形の組合せでもよく、すなわち回転軸に関し回転軸に沿い同時に発生するものである。
モータの機能は、各回転ごとに所与の回数繰返されるワークサイクルを含むものとして説明できる。非常に速度が小さいとき、たとえば停止からの始動時には、1つの極性のDCパルスの供給を受けるように設計されたモータに対するワークサイクルは、巻線が電流を搬送するときの1つの部分と、巻線に電流がないときの別の部分とからなる。交流極性の電流パルスの供給を受けるように設計されたモータに対しては、ワークサイクルは、巻線が1つの極性の電流の供給を受けているときの1つの部分、続く電流のない部分、その後の巻線が反対の極性の電流の供給を受けているときの部分、およびその後のワークサイクルの別の電流のない部分からなる。
電流のない状態では、回転子は始動位置、すなわち巻線が電流の供給を受けているならば駆動トルクを生じさせる、すなわちモータにおいておよび/またはモータにより駆動される物体における何らかの摩擦トルクなどを克服するに十分高い、モータの優先方向におけるトルクを生じさせる位置に達しなければならない。永久磁石の力によりモータにおいて発生したトルクは、巻線に対するエネルギ供給が可能な位置に回転子が到達するまでその方向を維持しかつ十分な強度を備えなければならない。電流のない状態においてトルクを成長させることに対する要求は、モータが少なくとも1つの永久磁石の極を含まねばならないことを意味することが理解されるだろう。
上記の原理に従い動作し極システムにおいて磁気の非対称を示すモータは、WO90/02437およびWO92/12567より既知である。本発明の目的は、上記の刊行物におけるモータにより示されるタイプのモータにおける改良点を得ることである。
この目的は、添付の請求項に規定される、磁気的に活性な固定子および回転子素子(極)の配置により達成される。
構造上の代替実施例を実現する機会に加え、本発明はまた、モータが発生させる力、回転するモータにおけるトルクおよび線形的なモータにおける線形的に作用する力または「牽引力」を、以下のように1つ以上の点について増大させる機会を提供する。
電流のないモータの回転子を最も近い始動位置に引寄せる、永久磁石極により発生されるトルクを増大させる。このような改良点は、たとえばシャフトシールにおいて大きな摩擦トルクが駆動される物体に現れ得るような応用例においては有利である。
回転子が始動位置で静止しており巻線に利用可能な最大の電流が供給されているモータに現れるトルクを増大させる。このような改良点はまた、前パラグラフで述べたような状況において有利である。
少なくともある実施例において、所与の熱損失に対するモータのエアギャップの力を増大させ、所与の目的に対しより小さくかつコスト上より好ましいモータを提供する。これは、たとえば手で支える道具または他の手で支える物体といったあるタイプの応用例においてモータの重量が小さいことが重要である場合には非常に有利となるだろうが、供給エレクトロニクスにおける避けられないコストの増大が効果を相殺しないとすれば一般的にコスト的にも有利でもある。
本発明に関連するモータにおける磁気的に活性な素子は以下のとおりである。
固定子におけるコイル
原則的にはコイルは単一電流回路を形成し直列および/または並列に接続可能である。供給エレクトロニクスが並列に動作するいくつかのユニットからなる場合、これらは各々が自身のコイルにまたはコイル群にあたかも単一の電気回路を形成するように接続可能である。巻線に交流極性を供給する代わりに、2つの部分の巻線を用いることができ、巻線の2つの半分の部分には単一電流極性が与えられるが、巻線の半分の部分は磁気的に反対の方向を有する。
強磁性突極(リラクタンス極)
本発明に従い示される多くのモータでは、以下ではまたリラクタンス極とも呼ばれる強磁性突極はまた、単独でまたは永久磁石の極とともに固定子で見うけられることになる。
回転子にもリラクタンス極が存在する可能性があるが、好ましくは永久磁石の極とは混在しない。回転子におけるこうした極のタイプの混在は予測可能だが通常は意味のないものである。
固定子および回転子双方におけるリラクタンス極は磁気的に非対称でもよい。磁気的に非対称の固定子極については、非対称はモータの運動の優先方向に反対の方向に向けられるべきであるが、回転子では非対称は運動の優先方向と同じ方向であるべきものである。
その代わりとしてまたは加えて、固定子および回転子双方のリラクタンス極は、上記の方向と反対方向の何らかの磁気的な非対称を示してもよく、これによりモータが動作不能になることはない。
永久磁石極
回転子のリラクタンス極のみを備えるモータは常に固定子に永久磁石極を備えていなければならない。固定子の永久磁石極は好ましくは磁気的に平衡がとれている、すなわち両極性の数および大きさが等しい。
永久磁石極が非対称であることが有利である場合がある。
単一極性の電流パルスの供給を受けるように設計された永久磁石回転子極を備えるモータは、固定子に永久磁石極を常に備えていなければならない。このような永久磁石極の形状が非対称であり、主極部分および補助極部分を有する場合、有利には、主極部分は補助極部分の方向と反対方向に、たとえば主極部分のみからなる、極が対称であるならば存在するであろう位置から、ずらされてもよい。
永久磁石回転子極を備えるモータには、固定子に永久磁石極がないかもしれない。このようなモータは、交流極性の電流パルスの供給を受けるときのみ自己始動である。こうしたモータは、単一極性の電流パルスの供給を受けるモータよりも均一的なトルクの成長、および所与の巻線の損失に対しより大きな平均トルクを有することになるであろう。
対称の永久磁石極および非対称の永久磁石極双方は、斜めの端部またはエッジ、すなわち回転子の軸の方向に対しある角度で延びるエッジを有し得る。永久磁石の極のエッジがこのように斜めになっていることがモータの機能に非常に有利である場合がある。このような斜めにされたエッジは幾何学的形状において実施される必要はない。エッジが、(たとえば永久磁石極において)インプリントされた磁気分極に関する境界線(境界ゾーン)からなる、すなわち永久磁石極が磁化されるときにインプリントされることで十分である。
同じ磁気分極のこうした境界線またはゾーンは、線形的以外にのびていてもよく、その場合モータの機能に大きな影響を与えることはない。
磁気の非対称は、本発明および添付の請求項の範囲内でいくつかの方法で達成することができ、それらのいくつかについて以下で説明する。
先行技術によるモータのように、磁気非対称は、モータに優先的始動方向を組入れることを目的とするが、本発明に従うモータにおける磁気非対称はまた他の目的にも役立つものである。
基本的に、本発明において用いられるような磁気非対称のさらなる目的は、本明細書において引寄せ距離と名付けられるものを延長させることである。この距離は、モータ部分の一方における永久磁石極または磁化されたリラクタンス極が、他方のモータ部分における極を十分に引付けて、2つの極が引込み位置のような第1の安定位置から始動位置のような次の安定位置へと互いに引寄せられるようにできる距離である。この場合、2つの極は磁気的に互いに整列しており、そのため、相対運動の方向において引く力は極間に存在しない(その方向を横切る方向における磁気的な引きのみ)。
この引寄せ運動中、2つの極間のパーミアンスまたは言い換えればこれらの間を通過する磁束(起磁力が一定であると仮定する)が、極が磁気的に整列しているときに発生する最大値まで着実に増大する。引寄せ距離の延長はこのように、引寄せ距離にわたる磁束変化の率の平均値の低減を必要とする。
このような低減は、磁気非対称により、たとえば極の少なくとも一方に相対的に優先的な始動方向に延在するさらなる極部分を設けて、極が主極部分および優先始動方向を定める補助極部分を有するようにすることにより可能である。
始動位置および引込み位置において、補助極部分は少なくとも、他方のモータ部分の次の極(相対的な優先始動方向において見られる)の近傍における点まで延在し、わずかにその極と重なり合っていてもよい。しかしながら、補助極部分の重なり合う部分は、主極部分の重なり合う部分のように重なり合いの単位長さ(円周方向に測定される)あたりの磁束の量ほどの磁束を搬送してはならない。
例として選択した回転子モータにおいて、固定子極および回転子極双方の前端部および後端部双方が軸方向に延在すると仮定すると、固定子極の磁気非対称は多くの場合原則的には以下のようにして観察される。モータの回転子は、回転子と直径が同じである均質な強磁性の円柱と置換えられ、エアギャップにおける磁束密度は円柱が回転し極を通過して回転の優先方向におけるラインを移動させるときに円柱の表面で軸方向に延在するラインに沿って測定される。極に関するラインの角度的位置に対する測定された磁束密度(ラインの長さにわたり平均化されたもの)を示すグラフは、極の前端部での0に近いポイントから、極の主要部分下のおよそ一定の値までいくぶん徐々にまたはいくぶんはっきりした段階を経て上昇し、次に後端後で急激に減少する。もし極がその代わりに磁気的に対称であれば、グラフは対称でガウス曲線に似たものとなるであろう。
適切な変形を加えると、上記の原則はまた他の場合にも適用可能であり、たとえば、回転子極、またはその前端部および後端部が軸方向に延在しない極の磁気非対称を観察するときのような場合である。例として、極の端部が斜めにされて螺旋に沿って延在する場合、対応する斜めのラインに沿い発生する磁束密度の測定により観測可能である。
均一的な放射方向の大きさおよび均一的な放射方向の磁気分極を有する永久磁石極の場合、磁極の非対称は極の形状の結果として生じる可能性がある。たとえば、極の前端部および後端部は、モータの軸方向において異なる長さを有してもよい。同様の効果を、厚みが均一である永久磁石材料のリングにおける、対応の形状を有する磁気的にインプリントする極によって得ることができる。この場合、永久磁石リングの形状は、磁気パターンまたは「磁気形状」と何の関係もない。
磁極非対称はまた、前端部および後端部それぞれにおいて放射方向の大きさが異なる永久磁石極を与えることにより(すなわち極でのエアギャップの幅をモータ部分の相対運動の方向において変化するようにすることにより)、しかし全体の体積にわたり均一的に強い磁化を与えることにより達成できる。
永久磁石極に対し磁気非対称を可能にするために、いくつかの方法を同時に用いることはもちろん可能である。
強磁性突極、リラクタンス極に対し磁気非対称を実現するいくつかの方法がまたある。1つの方法は、エアギャップに面するこのような極の表面を、モータの軸方向における延在に関し非対称に配置することである。この場合、全体の極の表面は、回転軸から同じ放射方向の距離に位置する。
別の方法は、リラクタンス極の突出する面(エアギャップに面する面)を対称にするが、回転軸からの放射方向の距離を変化させる、すなわち極表面に沿うエアギャップの幅を段階的にまたは絶え間なく、他方のモータ部分の架空の(円筒形の)表面に関し変化させることである。
第3の方法は、極表面に沿い飽和磁束密度を変化させることである。これは、突極の異なる部分に対し異なる磁気材料を用いることにより、または成層強磁性極の充填要素を変化させることにより、またはたとえば実際の極の表面の下方に(実際の極の表面が均質に見えるように)打抜いた窪みにより、または鳥の湾曲した嘴の輪郭に似た形状を有するように補助極部分の放射方向の大きさを変化させることにより、達成可能である。
もちろん磁気非対称を達成するいくつかの方法を同時に用いることができる。非対称実現方法の選択は、通常、実際のモータの製造コストおよび供給エレクトロニクスのコスト間のバランスに依存する。なぜなら、非対称のタイプの選択は、供給エレクトロニクスに含まれるパワー電子スイッチ要素の大きさに影響し得るからである。
後に明らかにされるように、本発明を実施するモータでは、共通の巻線コイルに関連する極群の個々の極のみを、群のすべての極が、コイルにエネルギを供給する際に発生する磁界の影響を受けるように特徴づけるだけではない。本発明を実施するモータはまた、1つ以上の個々の極の磁気非対称によるのみでなく、極群内または回転子の個々の極の非対称の位置決めにより、極群を特徴づけ得る。
固定子の極群の極は、回転子極が、固定子極と磁気的に整列されている位置と、回転子の何らかの極が極タイプの異なる固定子極と、または永久磁石のみを有する固定子の場合は極性の異なる極と磁気的に整列している次の隣接する位置との間で移動しているときの、回転子極ピッチの2分の1よりも長いまたは短い距離を通して運動するならば、非対称に位置決めされる。
言い換えれば、たとえば固定子の永久磁石は、回転子が回転子極が永久磁石極と磁気的に整列している位置すなわち始動位置と、回転子極−いかなる回転子極でもよい−が引込み位置にある次の後続のまたは次の先行する位置との間で移動しているとき、回転子極が回転子極ピッチの2分の1よりも長いまたは短い距離を横切るならば、同じまたは異なる極群におけるリラクタンス極に関して非対称に位置決めされる。
対応する態様で、極の非対称の位置決めの結果発生する磁気非対称はまた回転子にも存在し得る。たとえば、交流極性の永久磁石極を含む回転子における極の列において、北極永久磁石極は南極永久磁石極間の中心位置からいずれの方向にも、すべての同様の極間に実質的に等しい間隔をおいて配置可能である。
なお、本発明の文脈では、極群(極ユニット)は、磁化コイルと関連する1つの極または複数の極を含み得る。
本発明について、添付の図面において概略的に示される多数の実施例に関連づけてより詳細に説明する。
図1Aは、回転モータの第1の実施例の端面図を示す。その固定子は、磁化巻線を備え、2つの同一の直径方向に対向する極群を有し、各々は2つの対称のリラクタンス極およびその間に配置された非対称の永久磁石極からなる。完全に引込まれた回転位置で示される回転子は、4つの非対称のリラクタンス極を有する。
図1Bは、エアギャップ内部から見た、動作位置から軸方向にずらされた、しかしさもなければ図1Aでとる互いに関連する位置にある、モータにおける極の列の一部の展開図である。
図1Cは、図1Aと同じ方法でモータを示し、固定子および回転子における永久磁石の磁界ラインが挿入される。
図1Dは、図1のモータの縦方向の断面図である。
図1Eは、図1Bと同様の図であるが、同じ軸方向の位置にあるが異なる相対位置にずらされている固定子および回転子の極を示しており、さらに、固定子の永久磁石極と回転子のリラクタンス極との間に作用する磁気の引寄せの力を表わすグラフを含む。
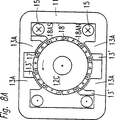
図2A、2Bおよび2Cは、図1A、1Bおよび1Cに対応する態様で第2の実施例を示す。
図3A、3Bから12A、12Bは、図1Aおよび1Bに対応する態様でさらなる実施例を示す。
図13Aから13Dは、固定子における永久磁石極の形状および配置について互いに異なる極の組合せの、図1Bに類似する展開図である。
図14A、および14Bは、図1Aおよび1Bに示されるモータの固定子リラクタンス極の変形を示す部分図断片図である。
図面を通して、放射方向に磁化される永久磁石極の極性は、磁石の北極側を指し示す矢尻により示される。
さらに、図面に示されるすべての実施例において、固定子および/または回転子極の非対称は、回転子の優先的始動方向が反時計回りとなるように方向づけられている。
図1A−1Cに示されるモータは回転モータであり、他のモータと同様、成層強磁性固定子11の形式の第1のモータ部分と、図1Dに示されるような適切な軸受により固定子において回転運動のために回動支持される成層強磁性回転子12の形式の第2のモータ部分とを備える。回転子の回転軸は12Aと示される小さな円によって示されており、回転の優先方向は矢印(すべての図示の実施例では反時計回り)により示されている。
固定子11は、直径方向に対向する2つの極群を有する。各極群は、2つの強磁性の突極13Sを含み、これはまたリラクタンス極とも呼ばれ、円周方向に互いに間隔がおかれ、永久磁石極14Aが間に配置される。回転子に面するこの極14Aの表面は、回転子の回転軸12Aと同心の円柱形表面に位置する。
各極群に対し、固定子11はまた、極群に巻付けられ共通の磁化巻線の部分を形成するコイル15を備える。
回転子12の外側にその周囲に均一的に配置されるのは、4つの強磁性突極16Aでありこれはまたリラクタンス極とも呼ばれる。固定子に面するこれら極の表面は、固定子の極表面を含む円柱から短距離のところに、回転軸12Aと同心である円柱に位置し、固定子の極表面および回転子の極表面はその間にエアギャップ17を形成する。回転子12の極ピッチは、固定子11の各極群内のリラクタンス極13Sの間隔に相当する。
図1Aから1Dに示される実施例では、固定子11のすべての極13Sおよび14Aならびに回転子12の極16Aは、回転の軸に垂直な同じ面に位置しているため、回転中回転子のすべての極は固定子のすべての極を通過しそれらと相互作用する。モータはもちろんこの態様で配置された軸方向に分離された極群のいくつかの組を含み得る。さらに、回転子のまわりで延びる閉じられた経路または列に配置される代わりに、各モータ部分の極がたとえば螺旋経路で配置されてもよい。
固定子のリラクタンス極13Sの極表面は、この応用例で意図される意味において磁気的に対称である。その重要性は、もし回転子12を均質の強磁性の円柱に置換える場合、そのエンベロープ表面が、そうでなければ回転子極16Aが位置する円柱表面と一致し、磁界が、電流が巻線15に供給されたときにエアギャップ17を通して固定子極の極表面の下方およびそのまわりを流れ、磁界がそのように分布するので、固定子に関するこの円柱の角度位置の関数として引かれる上記強磁性の円柱表面の母線に沿う磁束密度の平均値の図が、たとえばガウス曲線と同じタイプの対称性を示し、すなわち横座標に垂直な線に関する鏡像対称であることである。
他方、永久磁石極14Aは磁気的に非対称である。なぜなら、永久磁石極は回転子の回転方向に対向する面側に突出部14′を有するからである。この突出部は、幅すなわち回転軸12Aに並列する大きさが、極の主部分にわたる大きさよりも小さなこの側の極14Aにより生じる。全幅を有する永久磁石極14Aの部分は、主極部分を構成するということができ、一方より狭い突出部は、図で14′により示される補助極部分を構成するということができる。
回転子12のリラクタンス極16Aもまた、対応する態様で非対称である。なぜなら、リラクタンス極はその先頭または反時計回り側に、極の主部分(主極部分)よりも幅の小さな突出部16′(補助極部分)が設けられているからであり、この側は、回転方向に向いている。
上記から明らかなように、極における非対称は、前述の方法以外の方法で達成できる。代替方法の一例が、図1Aおよび1Bの一点鎖線で示されている。この代替例では、各極は軸および円周全体の大きさにわたり同じ幅を有するが、一方の側では、極の面は内部に向かい放射方向にオフセットされているため、エアギャップ17はこの側では極の主部分にわたってよりも大きい。
図1Bは、エアギャップ17内部から見た、図1Aの固定子および回転子の極群の1つの展開図を示し、回転子極は固定子極群に関し軸方向にずらされている。並列する一点鎖線RおよびSは、回転子および固定子間の相対運動の方向を示し、これらに垂直な一点鎖線Lは、固定子極間の中心線を表わす。固定子および回転子極の互いに関する位置は、図1Aに示される相対位置に対応し、電流が巻線15に供給されるときに固定子に関して回転子がとる安定した位置であり、そのため、リラクタンス極13Sはリラクタンス極に対向する主極部分に対し引付けられたまたは引込まれた位置に回転子極16Aを保つ傾向がある。
この回転位置で巻線に電流がもはや供給されないとき、永久磁石極14Aからの永久磁石の磁束のみが回転子に作用しこれを始動位置の方向にさらに引寄せる。図1Cは、この位置における永久磁石極の磁束パターンを示す。
図1A−1Dに示されるように、引込み位置では2つの回転子極16Aの補助極部分16′、右上および左下の回転子極は、永久磁石極14の補助極部分14′まで延在し、好ましくはさらに補助極部分にわずかに重なる。回転子極の永久磁石極および補助極部分のこの相対的な位置は、永久磁石極14がこれら回転子極に及ぼす磁気的に引付ける力、すなわち永久磁石極14Aにより回転子12に与えられる反時計回りのトルクが、巻線に電流がないとして、その最大または最大に近い位置である。
同時に、他方の2つの回転子極16すなわち左上および右下の回転子極の、永久磁石極14Aからの間隔は十分であり、そのため、永久磁石極はわずかな時計回りのトルクを回転子に与えるのみである。
したがって、永久磁石極14Aにより回転子に与えられる正味の反時計回りのトルクは、引込み位置から反時計回りに回転子12を力強く押し、回転子極ピッチの2分の1に対応する角度にターンさせ、回転子極16Aを始動位置にすることができる(引寄せ運動)。
引込み位置から始動位置への回転子の引寄せ運動を通し、重なり合い相互作用する各永久磁石極14Aおよび回転子極間の磁束は、極の重なりが増大するに従い徐々に増加するため、反時計回りのトルクが、始動位置に到達するまで回転子12に対して与えられる。
始動位置では、2つの初めに述べた回転子極16Aの各々は、それぞれ上側および下側の永久磁石極14Aと磁気的に整列し、回転子極16Aの前端部の補助極部分16′の部分は、永久磁石極を超えて反時計回り方向に延在し、回転子極の後端部は永久磁石極の補助極部分14′に対向して位置決めされる。これは図1Eに示されている。
図1Eはまた、引込み位置から始動位置への引寄せ運動中の、回転子リラクタンス極16の前端部16″の重なり合う位置dに対する、永久磁石極14および回転子リラクタンス極16間に作用する引寄せ力Fを示す、図1Aから1Dに示されるモータの実施例を表わすグラフを含む。図1Eの右側部分では、回転子リラクタンス極16Aの引込み位置が一点鎖線で示される。
このグラフは、引込み位置における、永久磁石極14Aの補助極部分14′と回転子リラクタンス極16Aの補助極部分16′との間の重なり(正および負)の異なる量に対する、回転子リラクタンス極16に作用する引寄せ力を示す。
図1Eから、引込み位置における重なりが−1mm、すなわちリラクタンス極16の前端部16″が永久磁石極から負または時計回り方向に1mm間隔がおかれていれば、引寄せ力は非常に小さいことが明らかである。前端部16″が補助極部分14′の端部に対向していれば(0の重なり)、引寄せ力は実質的に大きくなり、約1mmという正の重なりでは、補助極部分16′に対する引寄せ力は、最大または最大に近く、この場合、約1mmの負の重なりに対する引寄せ力の3から4倍である。回転子リラクタンス極16の非対称に関連する固定子永久磁石極14の非対称はこのようにして、回転子のリラクタンス極のみがWO92/12567で開示されているモータにおけるような非対称である場合と比較して、引寄せ力の初期値の大幅な増大をもたらす。この引寄せ力の増大が、本発明に従うモータの応用分野を拡大する。
図1Eより、引寄せ運動中重なりが徐々に増大するにつれて、引寄せ運動の第1の部分の間すなわち主極部分が重なり合い始めるまで引寄せ力はおよそ一定のままである。継続される引寄せ運動中、引寄せ力は初めに増大し次に徐々に減少しリラクタンス極16Aが始動位置に到達する際には0になる。
さらに、図1Eは、引込み位置から始動位置への回転子リラクタンス極16Aの反時計回りの引寄せ運動中、永久磁石極14Aは、永久磁石極14Aの円周方向の大きさよりも大きな円周方向の距離を通して、回転子リラクタンス極に十分な引付け力を与えることを示している。上記距離は、前端部16″が永久磁石極14Aの補助極部分14′の端部14″に対向するかまたは端部14″から時計回り方向にほんのわずかに間隔がおかれている位置から、前端部16″が永久磁石極を十分に過ぎるポイントまでである。
回転子極が始動位置にあり、巻線コイル15に再びエネルギが供給されるとき、すべての4つの回転子極16Aの補助極部分16′はしたがって、回転子の回転方向において見られるようにその前方の固定子リラクタンス極13Sの近くにある。他方、各回転子極の後端部のその後ろの固定子リラクタンス極からの間隔は十分なものである。固定子リラクタンス極13Sおよびその後ろの回転子リラクタンス極16Aの前端部16″間の反時計回り方向における磁気の引付けはこのように、次の固定子リラクタンス極(すなわち回転子極の後ろのリラクタンス極)により同じ回転子極の後端部に与えられる時計回り方向における磁気の引付けを優に上回るであろう。
したがって、固定子リラクタンス極13Sにより回転子に与えられる正味トルクは、反時計回り方向に作用し、大きいものであるので、モータは考え得る負荷に対向して始動することができるだろう。再び、巻線コイルのエネルギ供給の結果として発生する磁束は、永久磁石極14Aにより発生する磁束に対向するため、永久磁石極は始動位置からの運動に実質的に反作用するものではない。
他の図面に示された実施例は、図1A−1Dにおいて示された実施例と異なる場合のみ説明される。すべての実施例に対し同じ表記が使用され、末尾につけられる文字AまたはSは非対称または対称を示している。特に述べられていなければ、極に関する「対称」および「非対称」は、幾何学上の対称または非対称(これは磁気的対称または非対称に対応しても対応していなくてもよい)よりもむしろ磁気的な対称または非対称に関する。
図2A−2Cにおけるモータは、固定子極に関してのみ図1A−1Cと異なる。より具体的には、各固定子極群における一方の固定子リラクタンス極13Aは、回転子極16Aの補助極16′と同じタイプの補助極13′に対し磁気的に非対称であり、一方、他方のリラクタンス極13Sおよび永久磁石極14Sは磁気的に対称である。補助極部分13′は、回転子極が始動位置にあり巻線コイルにエネルギが供給されたとき補助回転子極部分16′の上記の効果を増幅させる。
図3Aおよび3Bにおけるモータもまた、固定子極に関してのみ図1A−1Cのモータと異なる。この場合、各固定子極群における固定子リラクタンス極13Aおよび13Sは、図2Aおよび2Bにおけるものと同様である、すなわち一方が非対称であり他方が対称である。しかしながら、永久磁石極14Aは回転子補助極16′と同じタイプの補助極14′に対して非対称であり、その非対称は固定子リラクタンス極13Aの非対称と同じ方向に向けられている。結果として、非対称はこのモータにおけるすべての3つの極のタイプにおいて存在する。
図2A、2B、3A、3B、および以下のいくつかの図は、極群におけるリラクタンス極であれ永久磁石極であれ何らかのタイプのすべての極が、必ずしも対称または非対称という点において同種のものである必要はないことを示している。これはすべての実施例について当てはまることである。
図4A、4Bのモータは、各極群において2つの対称固定子リラクタンス極13Sおよび1つの非対称固定子永久磁石極14Aを、固定子11に関する限りは有しており、したがって、図1A−1Cにおけるモータと一致する。しかしながらこの場合、回転子12Cは前述の実施例における回転子12と異なった設計のものであり、これは一部は、同じように対向する補助極18′と非対称な永久磁石極18ANおよび18ASのみを有するからであり、一部はこれら永久磁石極が回転子本体の周辺に間隔を設けずに配置されており、隣接する極がそれぞれNおよびSという反対の極性を有するためである。
図5Aおよび5Bにおけるモータでは、各固定子極群は2つのみのリラクタンス極すなわち対称リラクタンス極13Sのみを有し、固定子11には従って永久磁石極はない。回転子12Cは図4Aおよび4Bにおける回転子と同様であるが、永久磁石極18ANおよび18ASはわずかに異なるように成形されている点のみが異なる。
図6A、6Bにおけるモータでは、図2A−2Bにおけるモータのように、固定子極群は1つの非対称および1つの対称のリラクタンス極13Aおよび13Sをそれぞれ有し、これは対称永久磁石極14Sと組合され、一方回転子12Cは図4Aおよび4Bにおける回転子と同様である。
図7Aおよび7Bにおけるモータは、図3Aおよび3Bにおけるモータと同じタイプの固定子極群を有する。すなわち、1つの非対称のおよび1つの対称のリラクタンス極13Aおよび13Sをそれぞれ備え、さらに非対称永久磁石極14Aならびに図4A、4B、6A、および6Bと同じ設計の回転子12Cを備える。
図8Aおよび8Bにおけるモータの固定子極群は非対称のリラクタンス極13Aしか備えず、したがって永久磁石極はなく、回転子は図4A、4B、6Aおよび6Bにおける回転子と非常に似ている。
図9Aおよび9Bにおけるモータでは、固定子極群は、図7Aおよび7Bにおけるモータの極の組合せに対応する極の組合せ、すなわち回転子の交流極性の対称の永久磁石18SNおよび18SSとともに非対称のリラクタンス極13A、対称のリラクタンス極13Sおよび非対称の永久磁石極14Aを有するものが使用される。
図8Aおよび8Bにおけるモータと同様、図10Aおよび10Bにおけるモータは、リラクタンス極のみを備える固定子極群を有する、すなわち、比較的長い補助極13′とともに非対称のリラクタンス極13Aを有する。図9Aおよび9Bにおけるモータのように、回転子12Cは磁気的に対称な永久磁石極18SNおよび18SSのみを有し、この場合はしかしながら部分的に斜めにされた端部を備えている。
図11Aおよび11Bは、回転子12Dが図1Aから1Dにおける回転子12Cに類似するモータを示しているが、異なる点は、3つの非対称のリラクタンス極16Aを備えることである。この場合、固定子11Dは円形であり、永久磁石極のみが与えられている、すなわち、2つの直径方向に対向する群である非対称の永久磁石極14ANおよび14ASであり、各群は交流極性の2つの間隔がおかれた極NおよびSを含み、極のピッチは回転子極ピッチの2分の1である。さらに、このモータにおいては、巻線コイル15には交流極性の電流パルスが供給される。巻線コイル15Dは前述の実施例の巻線コイルと、固定子11Dのまわりに部分的にトロイド状(環状)に巻付けられている点のみが異なっている。
固定子および回転子の極の他の組合せもまた、本発明の範囲内で可能である。上記に示し説明した極の配置に加え、以下のリストは本発明の範囲内の極の配置の例を含む。
I.固定子における対称リラクタンス極
A.固定子における非対称永久磁石極
(対称または非対称配置)
1.回転子におけるリラクタンス極
a.非対称リラクタンス極 図1
b.対称リラクタンス極 −−−
2.回転子における永久磁石極
a.非対称永久磁石極
(対称または非対称の極の列に配置される。) 図4
b.対称永久磁石極
(対称または非対称の極の列に配置される。)
B.対称永久磁石極
(固定子における非対称配置)
1.回転子におけるリラクタンス極
a.非対称リラクタンス極
b.対称リラクタンス極 図12
C.固定子における永久磁石極の欠如
1.回転子における永久磁石極
a.非対称永久磁石極 図5
b.非対称の極の列に配置された対称永久磁石極
II.固定子における非対称リラクタンス極
A.固定子における対称永久磁石極
1.回転子におけるリラクタンス極
a.非対称リラクタンス極 図2
b.対称リラクタンス極 −−−
2.回転子における永久磁石極
a.非対称永久磁石極 図6
B.固定子にける非対称永久磁石極
1.回転子におけるリラクタンス極
a.非対称リラクタンス極 図3
b.対称リラクタンス極 −−−
2.回転子における永久磁石極
a.非対称永久磁石極 図7
b.対称永久磁石極 図9
C.固定子における永久磁石極の欠如
1.回転子における永久磁石極
a.非対称永久磁石極
(対称または非対称の極の列に配置される。) 図8
b.対称永久磁石極
(対称または非対称の極の列に配置される。) 図10
III.固定子のみにおける対称永久磁石極
A.対称の極の列に配置される固定子極
1.回転子におけるリラクタンス極
a.非対称リラクタンス極
B.非対称の極の列に配置される固定子極
1.回転子におけるリラクタンス極
a.非対称リラクタンス極
b.対称リラクタンス極
IV.固定子における非対称永久磁石極
A.対称の極の列に配置された固定子極
1.回転子におけるリラクタンス極
a.非対称リラクタンス極 図11
b.対称リラクタンス極
B.非対称の極の列に配置された固定子極
1.回転子におけるリラクタンス極
a.非対称リラクタンス極
b.対称リラクタンス極
図12Aおよび12Bは、これもまた本発明の範囲内であるモータを示す。すべての個々の極は固定子におけるものおよび回転子におけるもの双方、磁気的に対称である。このモータにおいて、本発明の目的は、その代わりに、固定子における極群内の磁気非対称により、すなわち、極群の1対の対称のリラクタンス極間の対称の永久磁石極の非対称の位置決めにより達成される。回転子にもまた対称のリラクタンス極が設けられているため、図12Aおよび12Bに示されるモータはまた上記のカテゴリ化したもののカテゴリI.B.1.b.に属するものと見なし得る。
より具体的には、図12Aおよび12Bに示されるモータは、図1Aから1Dに示されるリラクタンス極と同様のリラクタンス極13Sを有する固定子11を含む。回転子12はまた図1Aから1Dの回転子に類似するが、その極16には、前端部および後端部双方に補助極部分16′が設けられており、これら補助極部分の円周方向の大きさがより小さいことのみが異なっている。
各極群は、2つのリラクタンス極13Sの一方に隣接して非対称または中心をはずれた位置に配置される矩形の磁気的に対称の永久磁石極14を含む。2つの永久磁石極14はレバー21を含む共通のアクチュエート(駆動)メカニズム20に接続される。モータの動作において、永久磁石極14は選択された中心をはずれた位置において静止しているが、図12Aにおける実線で示される位置から下方向にレバー21をシフトさせることにより、永久磁石極14を図示された中心をはずれた位置から他方の固定子リラクタンス極13Sに隣接する対応の中心をはずれた位置(図12Aおよび12Bにおける一点鎖線で示される)へと円周方向に移動させ、回転子の回転の優先方向を反対にすることができる。
回転子12は、引込められたまたは引付けられた位置の極16とともに示される。この位置では、2つの回転子極すなわち左上の極および右下の極の後端部(回転子の反時計回りの回転を仮定する)での補助極部分16′は、各永久磁石極14の一方の端部に非常に近接しており、好ましくは、各永久磁石極および回転子極の隣接するものの一方の間にわずかに重なりがある。各永久磁石極14および他方の隣接する回転子極の対向する側の間隔は十分にある。
したがって、図示の引込められた回転子位置では、各永久磁石極14およびその前方の回転子極16間の磁気的な引付けは、回転子の回転方向においてみられるように、永久磁石極およびその後方の回転子極間の磁気的な引付けを大幅に上回るであろう。回転子が図示の位置にあり巻線コイル15における電流が遮断されるとき、永久磁石極14はしたがって、回転子を時計回り方向に始動位置へと引くであろう。
始動位置では、回転子極16の前端部の補助極部分16′は、その前方の2つの固定子リラクタンス極13Sに非常に近接しており好ましくはわずかに重なっている。巻線コイル15に再びエネルギが供給されると、これらリラクタンス極はしたがって強制的に回転子を、図1Aから1Eについて先に述べたように、始動位置から離れるように反時計回り方向に押すことができる。
図13Aから13Dは、図1B、2B、3Bなどに相当する図であり、固定子における1対のリラクタンス極間の永久磁石極の磁気的に対称および非対称の位置決めの概念をさらに解明するのに役立つ。この4つの図面は、永久磁石極の4つの異なる形状を、すべての図面において同じであり図1Aおよび1Bと同様の固定子および回転子リラクタンス極の組合せとともに示す。すべての4つの図面は、始動位置における回転子リラクタンス極16Aを示し、これは永久磁石極14S(図13A)または14A(図13Bから13D)と磁気的に整列しており、固定子極群に関連づけられる巻線には電流がない。
始動位置では、永久磁石極14Sおよび14Aにより回転子リラクタンス極16に与えられる力は、円周方向においては0であるが、整列した位置からの回転子極の何らかのずれに応答して、永久磁石極および回転子極間の引付け力は、回転子極を始動位置に戻す円周方向の成分を増大させるであろう。
比較のために含まれ、WO92/12567に示されるものに対応する対称極構造を示す図13Aにおいては、永久磁石極13Sは完全に回転子リラクタンス極16の主極部分16Aに重なる。図13B−13Dは、永久磁石極(図13B−D)の非対称の形状により、および/またはその非対称の位置決め(図13D)により非対称である、本発明に従う異なる固定子極構成を示す。
図13Dでは、極13Sおよび14Aからなる固定子極群は、永久磁石極14の極の非対称により、かつその極のわずかに非対称の位置決めにより(左側の固定子リラクタンス極13Sに向かっている)、非対称であり、その結果、2つの固定子リラクタンス極13S間の回転子リラクタンス極16Aのわずかに非対称に整列する位置がもたらされる。結果として、回転子極16Aが右側の回転子リラクタンス極と磁気的に整列する位置から、永久磁石極14Aと磁気的に整列する位置まで運動するときに横切る距離は、最後に述べた位置から、左側のリラクタンス極13Sと磁気的に整列する位置までの横切る距離よりもわずかに長い。
極の非対称の位置決めの結果発生する回転子の磁気的な非対称は図面には示されていないが、個々の極の非対称単独または組合せで、固定子−回転子極システムにおけるこのような非対称もまた可能である。たとえば、図4A、4Bから図10A、10Bに示されたような種類の回転子では、一方の極性の永久磁石極が他方の極性の永久磁石極と交互にされ、一方の極性の永久磁石極は、他方の極性の近接する永久磁石極間に中心位置からいずれかの円周方向にまとめてずらすことが可能であり、同様の極性の極の各組における極はなお十分に均一的に間隔をあけられている。
図面に示されたすべての実施例において、固定子および回転子は、図1Dに示されるように、薄い電気的な鋼板の積層からなる(この場合板の厚みは図を明確にするために非常に強調されている)。
固定子リラクタンス極13Sまたは13Aを形成する板の部分では、2つおきの固定子板11Aはわずかに減じられているため、エアギャップ17に面する湾曲した板のエッジ11Bは、近傍の板に関し外向きに放射方向にオフセットされている。図1Aおよび図1Dの下部を参照されたい。言い換えれば、2つおきの板11Cのみが、エアギャップ17まで延在し、一方介在する板11Aの端部はエアギャップ17に達しない。同様のリラクタンス極設計は、固定子および回転子双方にリラクタンス極が設けられる。すべてのモータの固定子および/または回転子において与えられるまたは与えられ得る。
リラクタンス極の極の面での板の積み重ねをこのように薄くすることは、回転子リラクタンス極が固定子リラクタンス極を通過して運動する際に生じる固定子および回転子リラクタンス極間のエアギャップの磁束の変化が、極の重なり合う領域の変化に比例することを確実にするのに役立つ。言い換えれば、極の重なり合う領域における磁束密度が実質的に、磁束変化が磁気回路の異なる領域における磁気飽和により制限されない限りは実質的に一定であることを確実にするのに役立ち、そのため、極の相互作用により成長するトルクはできるかぎり均一となる。
磁気的には、2つおきの板のリラクタンス極部分の低減または短縮の効果は、極の面を横切る飽和磁束密度の平均値を50%低減することであり、鉄損の大部分が生じる積層の大部分における磁気誘導の揺れ(磁束密度がモータの動作サイクルにわたり変化する間隔)を減じる目的に役立つ。
図14Aおよび14Bは、極の面においてリラクタンス極を薄くするための変形技術を示す。この変形技術は、増大した動作周波数で運転するモータに適切なものであり、上記の単一層のモータに限定されるものではなく、固定子および回転子双方にリラクタンス極を有するすべてのモータに一般には応用可能である。たとえば、WO90/02437およびWO92/12567に開示された種類のモータは、この変形技術に従い設計される固定子および/または固定子のリラクタンス極を有することが可能である。
増大されたモータ速度には、モータのための電流源の増大された動作周波数が必要である。しかしながら、増大された動作周波数には、増大した鉄損が伴われる。鉄損の増大を回避するためのある技術は、成層についてより薄い板を使用することにあるが、板の厚みを減じれば、自動製造設備を使用することが困難または不可能になるであろう。他の技術は、3つのうち2つを低減または短縮することにあるが、この技術は多くの場合満足を得られるものではない。
本発明のさらなる目的は、増大された周波数で動作するモータに適応可能なリラクタンス極設計を提供することでもあり、これがなければ上記の技術のいずれかに頼らなければならない。
本発明のこの局面に従うと、増大された動作周波数での誘導の揺れの所望の低減は、図1A−1Dに示されるタイプのリラクタンス極において、エアギャップにまで延在する板にリセス(窪み)を設けることにより達成され、この窪みは、極における磁束に与えられる板の断面領域を収縮し、したがって、極が極の面で磁気的に飽和する原因である磁束密度の低減に貢献する。
窪み(リセス)は、板の断面にわたり実質的に均一に分布しているべきものである。窪みは穴の形式をとってもよい。すなわち、エアギャップに対して開放していない開口でもよく、または、好ましくは狭い通路を介してエアギャップと連通する開口の形式をとってもよい。幅広い通路は望ましくない、というのも、広い通路は他のモータ部分のリラクタンス極の面に渦電流を生じさせるからである。
図14Aおよび14Bでは、図1A−1Dに示されるモータの固定子のリラクタンス極、すなわち上側の固定子極群において右の方にある固定子リラクタンス極13Sについての変形例が示される。図14Aは、1つの板11Aの短縮されたリラクタンス極部分を示し、図14Bは、近隣の板11Cの全長リラクタンス極部分を示す。エアギャップ17近くの領域では、この部分には、閉じられた輪郭を有ししたがってエアギャップ17に面する湾曲したエッジ11Eと接続しない細長い開口の形の3つの窪み11Dが設けられる。この3つの窪みは湾曲したエッジの長さに沿い均一に分布している。
板の窪みを設けられた部分を設計するときには、以下の実験式が役立つ。
ΔB2=ΔB1(f1/f2)1/1.2
この等式では、ΔBおよびfはそれぞれ、誘導の揺れおよび動作周波数を示し、指数1および2は、2つの異なる動作条件を示す。等式から明らかになるように、鉄損を変化させずに動作周波数を増大するには、動作周波数の増大に対する正比例未満の誘導の揺れの減少が必要である。たとえば、動作周波数を2倍にするには、鉄損を変化させないためには、誘導の揺れをもとの値の56%に減じることが必要である。動作周波数が引上げられると、鉄および銅の損失を調整しておよそ等しくし、トルク発生に最適なものとすることができる。したがって、磁束密度は変化しない鉄損に対応する磁束密度よりも大きいものとして選択できる。
上記のように鉄の板の窪みを設けることは、リラクタンス極の面での飽和磁束密度を低減するが、同じモータの大きさに対するエアギャップパワーの実質的な増大は、達成できるだろう。なぜなら、モータ速度を、必要とされるモータトルクの減少よりも増大できるからである。
当然、上記の原則に従う板のリラクタンス極部分に窪みを設けることは、すべての板のリラクタンス極部分が図1Dおよび14Dにおける板11Cについて示されたようなエアギャップまで延在するモータに適用できる。所望であれば、窪みは近隣の板について異なるものとすることができる。
代替実施例
以下の代替モータは、巻線を備える極群から組立てられ、回転または線形運動のために成形され得る。
回転モータは以下を有し得る。
1.円柱形、円錐形、ディスク形状などのエアギャップ表面。原則的には、静止した軸に関する母線回転を描くことが可能な何らかの形状の表面。
2.外部回転子
3.固定子および回転子における極の数の差。それぞれ、たとえば部分化された固定子の場合任意的なものでもよい。
4.円柱形のエアギャップ表面および内部回転子を備えるモータでは、いくつかの極群を配置して同じ面における電気的な鉄の積層により接続されるものでもよい(図面に示された実施例と同様)。モータは、共通の回転軸に沿ういくつかのこのような「モータディスク」からなるものでもよい。
こうしたディスクはその代わりとして、個々に閉じられた磁束経路なしで設計されてもよく、その代わりに軸方向に導かれた磁束経路により接続される。このような配置の例は、WO90/02437に見うけられる。「モータディスク」は、たとえば2つの「モータディスク」について共通のコイルにより磁化可能である。
5.「モータディスク」間に軸方向の磁束接続を備えるモータについては、巻線は、回転軸を囲む円柱のコイルからなるものでもよい(このような配置の例はWO92/02437に示される)。この場合、たとえば、回転部分は、そうでなければ静止している極のタイプを含み得る。その逆でもよい。
6.固定子がリラクタンス極も永久磁石極も有さず、したがって1つのタイプの極のみを有するモータは、固定子極の場所を回転子極の場所と交換することにより、本発明の範囲内で変形できる。このようなケースの例は、図5A、5B、8A、8B、10Aおよび10Bのモータである。こうしたモータではしたがって、固定子のリラクタンス極は、回転子のリラクタンス極に対応する永久磁石極と交換でき、回転子の永久磁石極は固定子の永久磁石極に対応するリラクタンス極と交換できる。図11Aおよび11Bは、図8Aおよび8Bにおけるモータのこのような変形例を示す。
7.モータにおける極、たとえば、リラクタンス極の形状および/または分布は、固定子および回転子間の磁気力を変化させることにより生じる雑音および振動ができるかぎり減じられるように選択できる。このタイプの既知の方策の例は、斜めにされた極のエッジ、または回転子の周囲に沿う極のわずかに不均等な分布、または固定子における極群における極のピッチおよび回転子における極のピッチ間の何らかの相違である。種々の方策を組合せることも可能である。
8.固定子における各群の2つまたは他の偶数のリラクタンス極を備え、固定子に永久磁石極を備えないモータでは、図示の実施例では極群の中央部に延びている軟磁性の固定子ヨーク部分を除去することができ、除去してもモータの磁気機能には影響を及ぼさない。スペーサとしての上記固定子のヨーク部分の機械的機能は、非磁性スペーサ手段のものと置換えることができる。
9.極群を磁化するための図1から12に示されたコイルはまた異なる配置にすることができることが理解されるであろう。たとえば、極群間のヨークを囲む変圧器タイプのコイル、または図11Aに示されるようなものである。固定子ヨークはまた、分割可能であり、そうすることにより予め巻かれたコイルの使用が可能になる。たとえば小さなモータでは、2つの極群を接続する2つのヨークを、2倍の断面を有する単一のヨークと置換え、ヨークを囲む単一のコイルを備えることがコスト上は有利であろう。このような配置は、小さなくま取りコイル形モータおよびDCモータにおいては既知である。
10.WO90/02437で述べられるように、単一の極性の電流パルスの供給を受けるモータにおいてただ一つの電子スイッチ素子を使用することを可能にするには、磁界エネルギを、動作巻線と並列に巻かれるフィードバック巻線によりDC源に戻すことができる。
Claims (16)
- 自己始動ブラシレス電気モータであって、
第1の極の列(S)に間隔をおかれた関係で配置される複数の極群を有する強磁性の第1のモータ部分(11)を含み、各極群は複数の極を含み、前記自己始動ブラシレス電気モータはさらに、
第2の極の列(R)に間隔をおかれた関係で配置される複数の極を有する強磁性の第2のモータ部分(12)と、
エアギャップ(17)を通して第2の極の列に対面する第1の極の列との相対運動のための第1のモータ部分および第2のモータ部分を支持する軸受手段と、
各極群と関連づけて配置され、かつ各極群に巻きつけられたコイルにエネルギが供給された際に極群の極を通して第1および第2の極の列(S、R)の極を接合する磁界を生成する巻線コイルを有する第1のモータ部分(11)の巻線システム(15)とを含み、
第1および第2の極の列(S、R)は、リラクタンス極とエアギャップを横切るように分極される永久磁石極とを含む極システムを構成し、極システムは、巻線システムにエネルギが供給された際および巻線システムへのエネルギが断たれた際双方において、モータ部分の運動の同一の優先的相対方向を与える磁気非対称を示し、
第1の極の列(S)の少なくとも1つの極群および第2の極の列(R)双方とも、主極部分と、主極部分からそれぞれのモータ部分(11、12)の運動の優先的相対方向に突出する補助極部分(13’、16’、14’、18’)とを有する極(13A、16A、14A、14AN、14AS、18AN、18AS)を含み、モータ部分(11、12)の相対運動の間、第1の極の列(S)の補助極部分は第2の極の列(R)の補助極部分と相互作用し、
極群のなかにリラクタンス極および永久磁石極双方を含むものがなければ、第1の極の列(S)はリラクタンス極のみまたは永久磁石極のみを含むことを特徴とする、自己始動ブラシレス電気モータ。 - 第1の極の列(S)の少なくとも1つの極群は、少なくとも1つの対称のリラクタンス極(13S)と、前記主および補助極部分を含む少なくとも1つの永久磁石極(14A)とを有することを特徴とする、請求項1に記載のモータ。
- 第2の極の列(R)は、前記主および補助極部分を含む少なくとも1つのリラクタンス極(16A)または前記主および補助極部分を含む少なくとも1つの永久磁石極(14A)を有することを特徴とする、請求項2に記載のモータ。
- 第1の極の列(S)の少なくとも1つの極群は、1つの対称のリラクタンス極(13S)と、前記主および補助極部分を含む1つのリラクタンス極(13A)と、前記主および補助極部分を含みリラクタンス極の間に位置決めされた1つの永久磁石極(14A)とを有し、第2の極の列(R)は、前記主および補助極部分を含み実質的に均等に間隔がおかれた複数のリラクタンス極(16A)を含むことを特徴とする、請求項2に記載のモータ。
- 第1の極の列(S)の少なくとも1つの極群は、2つの対称のリラクタンス極(13S)と、前記主および補助極部分を含みリラクタンス極間に位置決めされた1つの永久磁石極(14A)とを有し、第2の極の列(R)は、前記主および補助極部分を含み実質的に均等に間隔がおかれた複数のリラクタンス極(16A)を含むことを特徴とする、請求項2に記載のモータ。
- 第1の極の列(S)の少なくとも1つの極群は、少なくとも1つの対称のリラクタンス極(13S)および1つの対称の永久磁石極(14S)を有することを特徴とする、請求項1に記載のモータ。
- 第2の極の列(R)は、前記主および補助極部分を含み実質的に均等に間隔がおかれた複数のリラクタンス極(16A)ならびに前記主および補助極部分を含み実質的に均等に間隔がおかれた複数の永久磁石極(18AS、18AN)のうちいずれかを有することを特徴とする、請求項6に記載のモータ(図6)。
- 第1の極の列(S)の前記極群は前記主および補助極部分を含む少なくとも1つのリラクタンス極(13A)をまた有し、前記極群の永久磁石極(14S)はリラクタンス極(13A、13S)間に位置決めされることを特徴とする、請求項6または7に記載のモータ。
- 第1の極の列(S)はリラクタンス極(13A)のみを含み、第2の極の列(R)は交流極性の複数の永久磁石極(18AN、18AS)を含み、同様の極性の極は実質的に均等に間隔がおかれていることを特徴とする、請求項1に記載のモータ。
- 第1の極の列(S)の少なくとも1つの極群は前記主および補助極部分を含む1対のリラクタンス極(13A)を含むことを特徴とする、請求項9に記載のモータ。
- 第1の極の列(S)は永久磁石極(14AN、14AS)のみを含み、第1の極の列の少なくとも1つの極群は反対方向に分極された1対の永久磁石極(14AN、14AS)を含み、第2の極の列(R)は前記主および補助極部分を含み実質的に均等に間隔がおかれた複数のリラクタンス極(16A)を含むことを特徴とする、請求項1に記載のモータ。
- 前記極群は近接する1つまたは複数の極に関して反対方向に分極された少なくとも1つのさらなる永久磁石極を含むことを特徴とする、請求項11に記載のモータ。
- 補助極部分(13’、16’、14’、18’)は極の列(S、R)に沿い測定される長さを有し、2つのモータ部分(11、12)のいずれか2つの極が互いに磁気的に整列したときに、前記主および補助極部分を含むモータ部分の一方の極のうち少なくとも1つの補助極部分は、他方のモータ部分の近接する極の少なくとも近傍に延在することを特徴とする、上記請求項のいずれか1つに記載のモータ。
- 補助極部分(13’、16’、14’、18’)は極の列に沿い測定される長さを有し、2つのモータ部分(11、12)のいずれか2つの極が巻線システム(15)にエネルギが供給された結果として互いに磁気的に整列したときに、前記主および補助極部分を含むモータ部分の一方の極のうち少なくとも1つの補助極部分は、他方のモータ部分の近接する極に重なる、上記請求項のいずれか1つに記載のモータ。
- 第1の極の列の極群は同一であることを特徴とする、上記請求項のいずれか1つに記載のモータ。
- モータは回転モータであり、第1の極の列(S)は少なくとも1対の直径方向に対向する極群を含むことを特徴とする、上記請求項のいずれか1つに記載のモータ。
Applications Claiming Priority (7)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| SE9501981A SE9501981D0 (sv) | 1995-05-30 | 1995-05-30 | Självstartande borstlös elektrisk motor |
| DE19520054 | 1995-05-31 | ||
| DE9501981-6 | 1995-05-31 | ||
| DE19520052 | 1995-05-31 | ||
| DE19520054.3 | 1995-05-31 | ||
| DE19520052.7 | 1995-05-31 | ||
| PCT/SE1996/000704 WO1996038903A1 (en) | 1995-05-30 | 1996-05-30 | A self-starting brushless electric motor |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006016762A Division JP3921494B2 (ja) | 1995-05-30 | 2006-01-25 | 自己始動ブラシレス電気モータ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPH11506299A JPH11506299A (ja) | 1999-06-02 |
| JP3833254B2 true JP3833254B2 (ja) | 2006-10-11 |
Family
ID=27215163
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP53640896A Expired - Lifetime JP3833254B2 (ja) | 1995-05-30 | 1996-05-30 | 自己始動ブラシレス電気モータ |
| JP2006016762A Expired - Lifetime JP3921494B2 (ja) | 1995-05-30 | 2006-01-25 | 自己始動ブラシレス電気モータ |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006016762A Expired - Lifetime JP3921494B2 (ja) | 1995-05-30 | 2006-01-25 | 自己始動ブラシレス電気モータ |
Country Status (7)
| Country | Link |
|---|---|
| US (2) | US6204587B1 (ja) |
| EP (2) | EP1363384A3 (ja) |
| JP (2) | JP3833254B2 (ja) |
| CN (1) | CN1077347C (ja) |
| AT (1) | ATE245867T1 (ja) |
| DE (1) | DE69629192T2 (ja) |
| WO (1) | WO1996038903A1 (ja) |
Families Citing this family (48)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| ATE245867T1 (de) * | 1995-05-30 | 2003-08-15 | Vilmos Toeroek | Selbststartender bürstenloser motor |
| SE516498C2 (sv) * | 1996-05-30 | 2002-01-22 | Vilmos Toeroek | Självstartande borstlös elektrisk motor |
| SE516499C2 (sv) * | 1996-05-30 | 2002-01-22 | Vilmos Toeroek | Självstartande borstlös elektrisk motor |
| GB9615950D0 (en) * | 1996-07-30 | 1996-09-11 | Univ Warwick | Variable reluctance machines |
| DE19904469A1 (de) * | 1999-02-04 | 2000-08-10 | Bosch Gmbh Robert | Dreh-Stellantrieb und Drehschalter |
| GB9915370D0 (en) | 1999-07-02 | 1999-09-01 | Black & Decker Inc | Electrical machines |
| US7058291B2 (en) | 2000-01-07 | 2006-06-06 | Black & Decker Inc. | Brushless DC motor |
| US6538403B2 (en) | 2000-01-07 | 2003-03-25 | Black & Decker Inc. | Brushless DC motor sensor control system and method |
| US6975050B2 (en) | 2000-01-07 | 2005-12-13 | Black & Decker Inc. | Brushless DC motor |
| DE10135019A1 (de) * | 2001-07-18 | 2003-01-30 | Bosch Gmbh Robert | Permanentmagnetisch erregter Elektromotor |
| DE10147310B4 (de) * | 2001-09-26 | 2004-06-17 | Vacuumschmelze Gmbh & Co. Kg | Schalenförmiger Magnet |
| US6710502B2 (en) * | 2002-02-07 | 2004-03-23 | Wavecrest Laboratories, Llc | Rotary electric motor having at least three axially aligned stator poles and/or rotor poles |
| US6727629B1 (en) * | 2002-06-04 | 2004-04-27 | Wavecrest Laboratories, Llc | Rotary electric motor having a plurality of shifted stator poles and/or rotor poles |
| US6717323B1 (en) * | 2002-06-04 | 2004-04-06 | Wavecrest Laboratories, Llc | Rotary electric motor having a plurality of skewed stator poles and/or rotor poles |
| GB0215849D0 (en) * | 2002-07-09 | 2002-08-14 | Switched Reluctance Drives Ltd | Starting of switched reluctance generators |
| FR2847087B1 (fr) * | 2002-08-14 | 2014-04-11 | Valeo Equip Electr Moteur | Machine electrique tournante a double excitation autorisant un defluxage modulable |
| US20040061387A1 (en) * | 2002-09-27 | 2004-04-01 | Harmonic Drive, Inc. | Magnetically actuated commutator |
| US6906443B2 (en) * | 2003-04-21 | 2005-06-14 | Eaton Corporation | Brushless DC motor with stepped skewed rotor |
| US7237748B2 (en) | 2003-12-15 | 2007-07-03 | Delos Aerospace, Llc | Landing gear method and apparatus for braking and maneuvering |
| JP4619040B2 (ja) * | 2004-05-14 | 2011-01-26 | アイシン・エィ・ダブリュ株式会社 | 電動駆動制御装置、電動駆動制御方法及びプログラム |
| TWI249898B (en) * | 2004-08-27 | 2006-02-21 | Delta Electronics Inc | Brushless DC motor and driver used therein |
| CN1832305B (zh) * | 2005-03-08 | 2010-09-01 | 可斯塔·佩龙尼斯 | 无刷直流风扇马达 |
| US20070132330A1 (en) * | 2005-12-12 | 2007-06-14 | Fei Renyan W | Fan assemblies employing LSPM motors and LSPM motors having improved synchronization |
| DE102006034578A1 (de) * | 2006-07-26 | 2008-01-31 | Siemens Ag | Elektrische Maschine mit variierendem Luftspalt |
| EP2158668A4 (en) * | 2007-05-31 | 2017-07-19 | Krishnan Ramu | Switched reluctance machines with minimum stator core |
| AU2008291655B2 (en) * | 2007-08-24 | 2012-12-06 | Sunco Investments Ltd. | Multistage variable reluctance motor/generator |
| US8598758B2 (en) * | 2009-07-16 | 2013-12-03 | Cameron International Corporation | Electric motor and position holding device for such an electric motor |
| DE102009037114A1 (de) | 2009-07-31 | 2011-02-03 | C. & E. Fein Gmbh | Reihenschlussmotor mit Permanentmagnet |
| ITPN20110015A1 (it) * | 2011-03-11 | 2012-09-12 | Mate S A S Di Furlan Massimo & C | Motore elettrico brushless a magnete permanente di tipo monofase |
| CN102299607B (zh) * | 2011-08-25 | 2013-02-13 | 哈尔滨工业大学 | 永磁偏置型横向磁通直线磁阻电机 |
| RU2524144C2 (ru) * | 2012-03-19 | 2014-07-27 | Федеральное государственное автономное образовательное учреждение высшего профессионального образования "Уральский федеральный университет имени первого Президента России Б.Н. Ельцина" | Однофазная электрическая машина |
| JP2016000960A (ja) * | 2012-09-07 | 2016-01-07 | 三菱重工業株式会社 | 輸送機械用の電動圧縮機 |
| WO2014037023A1 (en) * | 2012-09-10 | 2014-03-13 | Cameron International Corporation | Magnetic holding brake and actuator with a magnetic holding brake |
| US9293952B2 (en) * | 2012-11-05 | 2016-03-22 | Foster-Miller, Inc. | Wound field flux switching machine with sinusoidal back electromotive force |
| JP2014204491A (ja) * | 2013-04-02 | 2014-10-27 | 本田技研工業株式会社 | ブラシレス直流モータ |
| CN103997178A (zh) * | 2014-05-19 | 2014-08-20 | 刘忠涛 | 一种永磁磁阻节能电动机 |
| JP6062900B2 (ja) * | 2014-09-15 | 2017-01-18 | トヨタ自動車株式会社 | ロータの製造方法 |
| US10107275B2 (en) * | 2014-12-01 | 2018-10-23 | Sheng-Lian Lin | Linear motor and compressor having the same |
| US10075051B2 (en) | 2015-03-16 | 2018-09-11 | Foster-Miller, Inc. | Series-wound heteropolar inductor motor |
| US9825510B2 (en) * | 2016-04-13 | 2017-11-21 | Hamilton Sundstrand Corporation | Variable gap electrical machines |
| KR101899508B1 (ko) * | 2016-10-20 | 2018-09-19 | (주)리큅 | 개량된 로터를 갖는 스위치드 릴럭턴스 모터 |
| ES2666212B1 (es) * | 2016-10-26 | 2019-03-19 | Univ Catalunya Politecnica | Maquina de reluctancia conmutada de flujo axial y un vehiculo electrico que comprende a la maquina |
| KR101893261B1 (ko) * | 2016-11-04 | 2018-08-30 | 경성대학교 산학협력단 | 비균일 공극을 가지는 단상 하이브리드 srm |
| KR101893262B1 (ko) * | 2016-11-04 | 2018-08-29 | 경성대학교 산학협력단 | 복합 공극을 가지는 단상 하이브리드 srm |
| KR101893289B1 (ko) * | 2017-02-07 | 2018-08-29 | 경성대학교 산학협력단 | 영구자석 빠짐 방지 모터 |
| US10840015B2 (en) * | 2017-07-26 | 2020-11-17 | Hitachi Industrial Products, Ltd. | Laminated core rotatable transformer |
| US10965176B2 (en) | 2019-01-15 | 2021-03-30 | Mcmillan Electric Company | Electric motors with pole biasing |
| CN114421656B (zh) * | 2021-12-31 | 2023-09-29 | 歌尔股份有限公司 | 旋转装置、力反馈装置及电子设备 |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5543953A (en) * | 1978-09-20 | 1980-03-28 | Rhythm Watch Co Ltd | Miniature motor for watch |
| US4438362A (en) * | 1982-08-19 | 1984-03-20 | Rotron, Incorporated | Self-starting, direct current motor with permanent magnets of varied magnetic strength |
| US4583015A (en) * | 1983-08-20 | 1986-04-15 | Pioneer Electronic Corporation | Single-phase brushless motor with multisector stator armature poles having different cross-sections |
| SE442368B (sv) * | 1983-12-21 | 1985-12-16 | Ems Electronic Motor Systems | Reluktansmotor av kommuteringstyp |
| SE459833B (sv) * | 1987-12-09 | 1989-08-07 | Astra Tech Ab | Roterande elektrisk maskin |
| SE465696B (sv) * | 1988-08-25 | 1991-10-14 | Vilmos Toeroek | Elektrisk motor och anordning foer matning av en saadan motor |
| US5294856A (en) * | 1990-04-30 | 1994-03-15 | Emerson Electric Co. | Shifted pole single phase variable reluctance motor |
| SE467852B (sv) * | 1990-12-28 | 1992-09-21 | Vilmos Toeroek | Elektrisk motor |
| GB9225846D0 (en) * | 1992-12-10 | 1993-02-03 | Switched Reluctance Drives Ltd | Further improvements in electric machines |
| GB9414584D0 (en) | 1994-07-19 | 1994-09-07 | Smithkline Beecham Plc | Package |
| ATE245867T1 (de) * | 1995-05-30 | 2003-08-15 | Vilmos Toeroek | Selbststartender bürstenloser motor |
| DE19633209A1 (de) * | 1995-08-28 | 1997-03-06 | Papst Motoren Gmbh & Co Kg | Verfahren und Vorrichtung zur Reduzierung des sogenannten Nutruckens bei einem Elektromotor |
| SE516499C2 (sv) * | 1996-05-30 | 2002-01-22 | Vilmos Toeroek | Självstartande borstlös elektrisk motor |
| SE516498C2 (sv) * | 1996-05-30 | 2002-01-22 | Vilmos Toeroek | Självstartande borstlös elektrisk motor |
| JPH1032967A (ja) * | 1996-07-15 | 1998-02-03 | Tsujikawa Keiko | トルク発生装置 |
| US6232693B1 (en) * | 1997-05-13 | 2001-05-15 | Emerson Electric Co. | Switched reluctance motor having stator inserts for noise reduction, magnet positioning, and coil retention |
| JP3450710B2 (ja) * | 1997-10-24 | 2003-09-29 | オークマ株式会社 | スウィッチトリラクタンスモータ |
-
1996
- 1996-05-30 AT AT96916422T patent/ATE245867T1/de active
- 1996-05-30 DE DE69629192T patent/DE69629192T2/de not_active Expired - Lifetime
- 1996-05-30 WO PCT/SE1996/000704 patent/WO1996038903A1/en active IP Right Grant
- 1996-05-30 EP EP03016486A patent/EP1363384A3/en not_active Withdrawn
- 1996-05-30 CN CN96195652A patent/CN1077347C/zh not_active Expired - Lifetime
- 1996-05-30 US US08/973,185 patent/US6204587B1/en not_active Expired - Lifetime
- 1996-05-30 EP EP96916422A patent/EP0829128B1/en not_active Expired - Lifetime
- 1996-05-30 JP JP53640896A patent/JP3833254B2/ja not_active Expired - Lifetime
-
2001
- 2001-01-03 US US09/752,512 patent/US6512318B2/en not_active Expired - Lifetime
-
2006
- 2006-01-25 JP JP2006016762A patent/JP3921494B2/ja not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| US6512318B2 (en) | 2003-01-28 |
| CN1191640A (zh) | 1998-08-26 |
| ATE245867T1 (de) | 2003-08-15 |
| JP2006174699A (ja) | 2006-06-29 |
| US6204587B1 (en) | 2001-03-20 |
| WO1996038903A1 (en) | 1996-12-05 |
| EP0829128B1 (en) | 2003-07-23 |
| EP0829128A1 (en) | 1998-03-18 |
| EP1363384A3 (en) | 2003-12-17 |
| DE69629192D1 (de) | 2003-08-28 |
| CN1077347C (zh) | 2002-01-02 |
| EP1363384A2 (en) | 2003-11-19 |
| US20020047447A1 (en) | 2002-04-25 |
| JPH11506299A (ja) | 1999-06-02 |
| DE69629192T2 (de) | 2004-05-27 |
| JP3921494B2 (ja) | 2007-05-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3833254B2 (ja) | 自己始動ブラシレス電気モータ | |
| KR100674286B1 (ko) | 스테이터와 로터 세그먼트를 분리시키는 적어도 2개의축방향의 에어 갭을 갖는 로터리 전기 모터 | |
| EP1706934B1 (en) | Rotor-stator structure for electrodynamic machines | |
| US4990809A (en) | Variable reluctance motor | |
| US8072106B2 (en) | Stator and rotor-stator structures for electrodynamic machines | |
| US20070057589A1 (en) | Interior permanent magnet rotor and interior permanent magnet motor | |
| JP3280896B2 (ja) | 永久磁石式リラクタンス型回転電機 | |
| JP2000512837A (ja) | 自己起動式ブラシレス電気モータ | |
| CN110268610B (zh) | 具有磁旋转场降低和通量集中的同步电机 | |
| US20090091205A1 (en) | Single field rotor motor | |
| JP2000512838A (ja) | 自己起動式ブラシレス電気モータ | |
| US6075774A (en) | Method and device for generating a frame check sequence | |
| JPH03195343A (ja) | ステッピングモータの着磁器 | |
| CN111030402A (zh) | 方向性硅钢片轴向磁场电动机 | |
| KR100515989B1 (ko) | 모터 및 발전기용 회전자의 영구자석 착자요크 | |
| JP2003522511A (ja) | 電磁装置 | |
| WO2021035526A1 (zh) | 具有栅栏式h型定子的盘式马达 | |
| JP2001251826A (ja) | ベーシックファクターを用いた交流回転機 | |
| CN112448555A (zh) | 具有栅栏式定子的外盘式马达 | |
| JPH03277161A (ja) | Hb型ステッピングモータ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20050726 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20051024 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20051212 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060125 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20060620 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20060719 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100728 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110728 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120728 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130728 Year of fee payment: 7 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| EXPY | Cancellation because of completion of term |