JP3779534B2 - 電動式パワーステアリング装置 - Google Patents
電動式パワーステアリング装置 Download PDFInfo
- Publication number
- JP3779534B2 JP3779534B2 JP2000226870A JP2000226870A JP3779534B2 JP 3779534 B2 JP3779534 B2 JP 3779534B2 JP 2000226870 A JP2000226870 A JP 2000226870A JP 2000226870 A JP2000226870 A JP 2000226870A JP 3779534 B2 JP3779534 B2 JP 3779534B2
- Authority
- JP
- Japan
- Prior art keywords
- control
- data
- control map
- map
- vehicle speed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000007704 transition Effects 0.000 claims description 36
- 230000005856 abnormality Effects 0.000 claims description 20
- 238000001514 detection method Methods 0.000 claims description 19
- 238000013459 approach Methods 0.000 claims description 4
- 238000011084 recovery Methods 0.000 description 16
- 238000010586 diagram Methods 0.000 description 8
- 238000000034 method Methods 0.000 description 8
- 238000012545 processing Methods 0.000 description 8
- 238000004364 calculation method Methods 0.000 description 6
- 238000005452 bending Methods 0.000 description 4
- 230000007423 decrease Effects 0.000 description 4
- 230000008569 process Effects 0.000 description 4
- 230000000694 effects Effects 0.000 description 3
- 230000008859 change Effects 0.000 description 2
- 230000006870 function Effects 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 101150064138 MAP1 gene Proteins 0.000 description 1
- 238000013500 data storage Methods 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 238000007562 laser obscuration time method Methods 0.000 description 1
- 230000007257 malfunction Effects 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
Images






Landscapes
- Steering Control In Accordance With Driving Conditions (AREA)
- Power Steering Mechanism (AREA)
Description
【発明の属する技術分野】
本願発明は、車速感応型の電動式パワーステアリング装置、さらに詳しくは、車速検出手段に故障が発生した場合に好適に対処することができるようにされた電動式パワーステアリング装置に関する。
【0002】
【従来の技術】
周知のとおり、電動式パワーステアリング装置においては、モータを利用することにより操舵補助力を発生させており、この操舵補助力を操舵機構部に作用させることにより、ステアリング操作に要するドライバの負担を軽減するように構成されている。車速感応型の電動式パワーステアリング装置においては、上記モータの出力は、車速と操舵トルクとに基づいて決定されており、たとえばCPUを用いて構成されたコントローラによってその制御がなされている。車速が低速のときには、ステアリングホイールの操作特性を軽くする必要があることから、上記モータの出力は高められる。反対に、車速が高速のときには、ステアリングホイールの操作特性を軽くすることは好ましくないため、上記モータの出力は低くされる。ただし、このような制御は、車速検出手段が故障した場合には実行困難となる。
【0003】
そこで、本出願人は、特開平1−215667号公報に記載された手段を先に提案している。すなわち、同公報に記載された手段は、本願の図7に示すようなデータを含むマップを用いる手段である。このマップは、モータの制御を実行するコントローラに付属して設けられた記憶装置に記憶されたものであり、車速検出手段が故障していない通常時に用いるための可変制御マップMPaと、車速検出手段の故障時に用いるための固定制御マップMPbとに区分することができる。可変制御マップMPaは、車速0、車速1〜5km、車速5〜10kmなどの複数種類の車速ごとに操舵トルクに対応するモータ電流を定めた複数のデータDaを含んでいる。このモータ電流の値が大きいほど、モータの出力が大きくなる。一方、固定制御マップMPbは、操舵トルクに対応するモータ電流を車速とは無関係に定めたデータDbを含んでいる。
【0004】
上記公報に記載の手段においては、通常時には、コントローラが可変制御マップMPaを利用することにより、車速および操舵トルクに対応したモータ電流をきめ細かく選定し、モータの出力を制御する。したがって、ステアリング操作に要する力を自動車の実際の走行状況に適合させることができる。これに対して、車速検出手段が故障したときには、上記コントローラは固定制御マップMPbを利用した制御に切り替わり、車速には関係なく、操舵トルクに対応したモータ電流を選定することにより、上記モータの出力を制御する。したがって、この場合には、可変制御マップMPaを用いた場合と比較すると、上記モータの出力制御は粗くなるものの、たとえば操舵トルクが大きくなったときには上記モータの出力をも大きくして、ステアリングホイールの操作特性を良好にするといった制御が可能である。
【0005】
上記した可変制御マップMPaの各データDaと固定制御マップMPbのデータDbとは、大きく相違している。したがって、可変制御マップMPaから固定制御マップMPbへの切り替えが急激になされると、上記モータの出力も急激に変動する場合がある。このような事態は、ステアリング操作に要する力の急変を招くため、適切ではなく、未然に防止することが望まれる。
【0006】
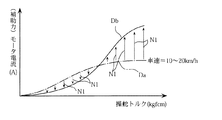
そこで、上記公報に記載の手段においては、可変制御マップMPaから固定制御マップMPbに切り替えるときには、コントローラが可変制御マップMPaで利用されていたデータを演算処理することによって、固定制御マップMPbに近いデータを順次作成し、この作成データに基づいてモータ電流を決定していた。より具体的には、たとえば車速10〜20kmで走行している際に車速検出手段が故障した場合には、コントローラは、図8に示す曲線に相当するデータDaを、同図の矢印N1に示すように、固定制御マップMPbのデータDbに徐々に近づけていく演算処理を実行し、その演算処理によって得られたデータに基づきながらモータ電流を決定していた。このような手段によれば、可変制御マップMPaから固定制御マップMPbへの切り替えを徐々に行うことが可能となり、ステアリング操作に要する力が急変しないようにすることができる。
【0007】
【発明が解決しようとする課題】
しかしながら、上記従来の手段においては、可変制御マップMPaから固定制御マップMPbへの切り替えを行う際に、可変制御マップMPaの所定のデータを固定制御マップMPbのデータDbに徐々に近づけるための演算処理をコントローラに実行させている。したがって、上記コントローラとしては、演算処理能力が高い高価なものを用いる必要があり、従来においては、この点において未だ改善すべき余地があった。
【0008】
本願発明は、このような事情のもとで考え出されたものであって、演算処理能力が高い高価なコントローラを用いることなく、車速検出手段が故障したときに適切に対処することができる電動式パワーステアリング装置を提供することをその課題としている。
【0009】
【発明の開示】
上記の課題を解決するため、本願発明では、次の技術的手段を講じている。
【0010】
本願発明によって提供される電動式パワーステアリング装置は、操舵トルク検出手段と、車速検出手段と、この車速検出手段の異常を検出する異常検出手段と、操舵補助力を発生させるモータと、このモータの出力を制御するための制御量と操舵トルクとの関係を複数段階の車速ごとに定めた複数のデータを含む可変制御マップおよびこの可変制御マップの代替となる制御量と操舵トルクとの関係を定めたデータを含む固定制御マップが記憶されている記憶手段と、上記異常検出手段により異常が検出されていない通常時には、上記操舵トルク検出手段および上記車速検出手段により検出されたデータと上記可変制御マップとに基づいて上記モータを制御する一方、上記異常検出手段により異常が検出されたときには、上記モータの制御を上記固定制御マップを利用した制御に切り替えるコントローラと、を具備している、電動式パワーステアリング装置であって、上記記憶手段には、制御量と操舵トルクとの関係を複数通り定めた複数のデータを含む移行制御マップがさらに記憶されており、かつ上記コントローラは、上記可変制御マップを利用した制御から上記固定制御マップを利用した制御に移行するときには、その移行途中において上記移行制御マップの複数のデータに基づく制御に順次切り替わることにより、上記可変制御マップを利用して実行されていた制御特性を上記固定制御マップを利用した制御特性に段階的に近づけるように構成されていることを特徴としている。
【0011】
このような構成を有する電動式パワーステアリング装置においては、次のような効果が得られる。
【0012】
第1に、上記車速検出手段が故障したときには、上記コントローラによるモータの制御が、上記可変制御マップを利用した制御から上記固定制御マップを利用した制御にいきなり切り替わることはなく、上記移行制御マップを利用した制御を経由してから、上記固定制御マップを利用した制御に切り替わることとなる。一方、上記コントローラは、上記移行制御マップを利用した制御を実行することにより、上記可変制御マップを利用して実行されていた制御特性を上記固定制御マップを利用して実行される制御特性に徐々に近づけていく。したがって、上記車速検出手段の故障時には、ステアリング操作に要する力が急に大きくなったり、あるいは小さくなったりすることを回避しつつ、上記固定制御マップを利用したモータの制御モードにスムーズに移行させることができる。
【0013】
第2に、上記移行制御マップを利用した制御に際しては、この移行制御マップのデータと操舵トルクとに基づいて上記モータの出力を制御するための制御量を選定し、この選定された制御量に基づいて上記モータの出力が制御されることとなる。したがって、従来とは異なり、可変制御マップから固定制御マップへの移行を行う際に、コントローラに制御量を算出するための複雑な演算処理を実行させる必要はない。その結果、上記コントローラとしては、演算処理能力の高いものを用いる必要を無くし、または少なくすることができ、そのコストを下げることができる。
【0014】
本願発明の好ましい実施の形態においては、上記コントローラは、上記異常検出手段により異常が検出されたときには、上記可変制御マップで利用されるデータを、上記モータの出力を小さくする特性をもつ他の複数のデータに順次切り替え、かつ上記モータの出力を最小とする特性のデータを利用した制御に移行した後に、上記移行制御マップを利用した制御に切り替わるように構成されている。
【0015】
このような構成によれば、上記車速検出手段に故障が生じたときには、上記移行制御マップを利用した制御に切り替わる前に、上記モータの出力を徐々に小さくする制御が実行されることとなる。したがって、上記車速検出手段が故障する直前の状態と比べて、ステアリング操作に要する力は徐々に大きくなり、たとえば実際の車速が高速であるにも拘わらず、ステアリングホイールの操作特性が過度に軽くなるといった事態を生じないようにすることができる。
【0016】
本願発明のその他の特徴および利点については、以下に行う発明の実施の形態の説明から、より明らかになるであろう。
【0017】
【発明の実施の形態】
以下、本願発明の好ましい実施の形態について、図面を参照しつつ具体的に説明する。
【0018】
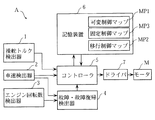
図1は、本願発明に係る電動式パワーステアリング装置の概略構成の一例を示すブロック図である。図2は、可変制御マップの一例を示す説明図である。図3は、固定制御マップおよび移行制御マップの一例を示す説明図である。
【0019】
図1によく表われているように、本実施形態の電動式パワーステアリング装置Aは、操舵トルク検出器1、車速検出器2、エンジン回転数検出器3、故障・故障復帰検出器4、コントローラ5、記憶装置6、モータM、およびモータM用のドライバ7を具備して構成されている。
【0020】
モータMは、この電動式パワーステアリング装置Aのステアリング機構に操舵補助力を付与するためのものであり、その出力は可変制御可能である。このモータMの出力が大きくなるほど、ステアリング操作に要する力を小さくすることができる。操舵トルク検出器1、車速検出器2、およびエンジン回転数検出器3は、この電動式パワーステアリング装置Aにおける操舵トルク、この電動式パワーステアリング装置Aを搭載した自動車の車速、およびエンジンの回転数をそれぞれ検出するものであり、これらによって検出されたデータは、コントローラ5や故障・故障復帰検出器4に入力される。車速およびエンジン回転数のデータは、インストルメントパネルに設けられている速度メータおよびタコメータを経由してからコントローラ5や故障・故障復帰検出器4に入力されるように構成されていてもかまわない。
【0021】
故障・故障復帰検出器4は、車速検出器2およびエンジン回転数検出器3からの信号に基づいて、車速検出器2が正常か否かの判断を行うものである。この故障・故障復帰検出器4は、たとえばエンジン回転数検出器3からエンジンが回転している旨のデータを受信しているとともに、車速検出器2から自動車が走行している旨のデータを受信している状態において、その後エンジンが一定回転数以上に回転しているにも拘わらず車速ゼロの状態が一定時間継続すると、車速検出器2が故障であると判断し、その旨の信号を出力するように構成されている。また、エンジン始動時においては、エンジンが一定回転数以上に回転している時間が継続しているにも拘わらず、車速がゼロの状態が一定時間以上継続すると、その時点で車速検出器2が故障であると判断されるようになっている。一方、車速検出器2が故障であると判断した後に、エンジン回転数のデータと照合して正常と考えられる車速のデータを受信したときには、この故障・故障復帰検出器4は車速検出器2が正常に復帰したものと判断し、その旨の信号を出力するように構成されている。本実施形態においては、この故障・故障復帰検出器4がコントローラ5とは別個の構成要素とされているが、本願発明はこれに限定されない。本願発明においては、コントローラ5に車速検出器2が正常であるか否かの判別機能を具備させることにより、このコントローラ5が故障・故障復帰検出器を兼用した構成とすることもできる。
【0022】
記憶装置6は、ROMあるいはEEPROMなどの適当なメモリを用いて構成されたものであり、この記憶装置6には、可変制御マップMP1、移行制御マップMP2、および固定制御マップMP3が記憶されている。可変制御マップMP1は、車速検出器2が正常である通常時に利用するためのものであり、図2によく表われているように、操舵トルクとモータMに流すべきモータ電流との関係を、複数段階の車速ごとに定めた複数のデータD1〜D11を含んでいる。上記モータ電流は、モータMの出力を制御するための制御量の一例に相当するものであり、複数のデータD1〜D11は、基本的には車速が高速になるほど、モータ電流が小さくなる内容となっている。また、この可変制御マップMP1で利用される車速の上限は、たとえば98km/hとされており、実際の車速がこの車速を超える場合であっても、51〜98km/hの車速についてのデータD11が用いられるようになっている。
【0023】
図3によく表われているように、固定制御マップMP3は、操舵トルクとモータ電流との関係を車速には関係なく定めたデータD30を含むものである。この固定制御マップMP3は、車速検出器2が故障したときに利用するためのものであり、データD30は、実際の車速の高低を問わず、ステアリングホイールの操作特性が過度に軽くならないように考慮されたデータとされている。
【0024】
移行制御マップMP2は、可変制御マップMP1から固定制御マップMP3への移行時に利用するためのものであり、操舵トルクとモータ電流とについての複数通りの関係を定めた複数のデータD20〜D29を含んでいる。これら複数のデータD20〜D29は、たとえば操舵トルクが4N・m以下の領域については、可変制御マップMP1のデータD11および固定制御マップMP3のデータD30と同一であるものの、4N・mを超える操舵トルクの領域においては、同一の操舵トルクに対するモータ電流の大きさは、データD11とデータD30との中間領域に属し、かつ互いに相違した値となっている。これら複数のデータD20〜29のうち、データD20は、データD11に比較的近似した内容となっており、データD20からデータD29に進むにしたがってデータD30の特性に徐々に近づくようになっている。
【0025】
移行制御マップMP2の複数のデータD20〜D29は、たとえば図3に示すような屈曲線のそれぞれの屈曲点を示すデータとして記憶装置6に記憶されてる。より具体的には、たとえばデータD20は、その屈曲線の屈曲点となる符号n1〜n4で示す箇所の各座標のデータとして、記憶装置6に記憶されている。これは、他のデータD21〜D29についても同様である。また、本実施形態においては、可変制御マップMP1のデータD1〜D11や固定制御マップMP3のデータD30についても同様とされている。このようなデータの態様にすれば、3種類のマップMP1〜MP3の総データ量を少なくすることができ、記憶装置6としてメモリ容量の小さい廉価なものを用いることが可能となる。あるいは、記憶装置6を他のデータの記憶用途に併用するのに好適となる。また、図面においては、固定制御マップMP3および移行制御マップMP2を、可変制御マップMP1とは区分した状態に記載しているが、これら3種類のマップは、互いに関連する一群のデータとして一纏めにして記憶装置6に記憶させることが可能であることは言うまでもない。
【0026】
図1において、コントローラ5は、ステアリング操作に必要な力が適度な値となるように、モータMの出力制御を実行するものであり、たとえばCPUを具備して構成されている。このコントローラ5は、故障・故障復帰検出器4から車速検出器2が故障した旨の異常検知信号が出力されていない通常時においては、車速検出器2からの車速データ、操舵トルク検出器1からの操舵トルクのデータ、および可変制御マップMP1に基づいてモータ電流値を決定し、この決定した値のモータ電流がドライバ7を介してモータMに流れるようにする制御を行う。ただし、故障・故障復帰検出器4から異常検知信号が出力されたときには、後述するように、可変制御マップMP1を利用した所定の制御を終えた後に、移行制御マップMP2を利用した制御に移行し、その後最終的に固定制御マップMP3を利用した制御を実行するように構成されている。また、異常検知が解除された故障復帰時についても、後述するような制御を行うように構成されている。
【0027】
次に、コントローラ5の具体的な制御動作手順を、図4〜図6に示すフローチャートにしたがって説明し、併せて本実施形態の電動式パワーステアリング装置Aの作用をも説明する。
【0028】
まず、エンジンを始動させると、コントローラ5は、可変制御マップMP1を利用したモータ制御を開始する(S1,S2)。故障・故障復帰検出器4から異常検出がなされない場合には(S3:NO)、エンジン停止がなされるまで、可変制御マップMP1を利用したモータ制御がなされる(S4)。可変制御マップMP1は、操舵トルクとモータ電流との関係が、複数段階の車速ごとにきめ細かく定められているために、自動車の実際の走行条件に応じた適切なモータ出力、すなわち操舵補助力が得られることとなり、ステアリングホイールの操作特性を良好にすることができる。
【0029】
故障・故障復帰検出器4において異常検出がなされた場合には(S3:YES)、コントローラ5は、可変制御マップMP1で利用されるデータを高速帯域の車速に対応するデータに順次切り替えていく(S5)。より具体的には、異常検出がなされた直前の車速が、たとえば7km/hであったとすると、その時点では可変制御マップMP1のデータD5がモータ制御に利用されているために(図2参照)、コントローラ5は、可変制御マップMP1のうち、制御に利用するデータを、データD5からデータD6へ、さらにはその後データD7,D8,D9……に順次切り替えていく。最終的には、最も高速の帯域であるデータD11にする。このようなデータの切り替えは、たとえば1秒間隔で行う。このように、コントローラ5が利用する可変制御マップMP1のデータを順次高速寄りのデータに変化させていくと、基本的にはモータ電流が小さくなり、モータMによる操舵補助力が徐々に小さくなる。したがって、ステアリングホイールの操作特性が急に軽くなったり、あるいは急に重くなったりしないようにすることができる。また、上記ようにすれば、ステアリングホイールの操作に必要なドライバの力が徐々に大きくなるために、仮に実際の車速が高速であったとしても、ステアリングホイールがいわゆるきれ過ぎる状態にならないようにすることができる。
【0030】
可変制御マップMP1のデータD11を利用した制御が、たとえば1秒間実行された後には、コントローラ5は、モータ制御に利用するマップを、可変制御マップMP1から移行制御マップMP2に切り替える(S7)。移行制御マップMP2に切り替えた直後においては、コントローラ5は、先のデータD11に最も近い特性をもつ移行制御マップMP2のデータD20を利用した制御を実行する。したがって、この移行制御マップMP2への切り替え時においても、コントローラ5によって実行される制御特性が急変しないようにすることができる。
【0031】
ただし、このデータD20を利用した制御は、たとえば1秒間のみ行い、その後はデータD21,D22,D23……の順序で順次切り替えていき、これらの各データにしたがってモータ制御を実行する。このようにデータを順次切り替えることにより、データD29の制御に到達する。データD29による制御をたとえば1秒間実行した後には、コントローラ5は、その後モータ制御に利用するマップを移行制御マップMP2から固定制御マップMP3に切り替え、そのデータD30を利用した制御を開始する(S9:YES,S10)。
【0032】
上記したように、可変制御マップMP1から固定制御マップMP3に切り替わるときに、その途中過程において、移行制御マップMP2の複数のデータD20〜D29を順次一定時間間隔で実行すると、コントローラ5によって実行される制御特性を可変制御マップMP1を利用した制御特性から固定制御マップMP3を利用した制御特性へと徐々に近づけるように変化させることができる。したがって、車速検出器2が故障したときの可変制御マップMP1から固定制御マップMP3への切り替え時において、ステアリング操作に要する力が、急変しないようにすることができる。その結果、ステアリングホイールを握るドライバに違和感、あるいは不安感を極力与えないようにしつつ、可変制御マップMP1から固定制御マップMP3へのスムーズな移行が行えることとなる。
【0033】
一方、上記した移行制御マップMP2を利用したモータMの制御は、コントローラ5が移行制御マップMP2のデータと操舵トルクの値とに基づいてモータ電流を決定し、この決定されたモータ電流がモータMに流れるようにする制御である。したがって、コントローラ5には、従来技術とは異なり、可変制御マップMP1から固定制御マップMP3への移行をスムーズに行わせるための複雑な演算処理を行わせるといった必要はなく、コントローラ5としては、演算処理能力がさほど高くない廉価なものを用いることが可能となる。固定制御マップMP3を利用した制御に移行した後においては、故障・故障復帰検出器4から車速検出が正常である旨の信号を受信しない限りは、その後エンジン停止がなされるまで固定制御マップMP3を利用した制御が継続して実行されることとなる(S11:NO,S12)。
【0034】
固定制御マップMP3を利用した制御が実行されている間に、故障・故障復帰検出器4から車速検出が正常である旨の信号を受信した場合には(S11:YES)、コントローラ5は、制御に利用するマップを、固定制御マップMP3から移行制御マップMP2に切り替える(S13)。コントローラ5は、この切り替え直後には、移行制御マップMP2のデータD29を利用した制御を、たとえば1秒の一定時間だけ実行し、その後はこのデータD29を、他のデータD28,D27,D26……D20にたとえば1秒間隔で切り替えていきながら、これらの各データに基づいた制御を実行する。コントローラ5は、データD20を利用した制御を一定時間実行した後には、可変制御マップMP1を利用した通常の制御に切り替わる(S15:YES,S16)。このように、固定制御マップMP3から可変制御マップMP1に復帰させる際に、事前に移行制御マップMP2に移行し、その参照データをデータD29からデータD20に順次切り替えるようにすれば、モータMによる操舵補助力を徐々に小さくしてから可変制御マップMP1を利用した制御に移行することができる。このようにすると、車速が高速であるにも拘わらず、ステアリングホイールの操作特性が過度に軽くなるといった事態を防止することができる。また、固定制御マップMP3を利用した制御から可変制御マップMP1を利用した制御へのスムーズな移行も行えることとなる。
【0035】
本願発明に係る電動式パワーステアリング装置の各部の具体的な構成は、上述の実施形態に限定されるものではなく、種々に設計変更自在である。
【0036】
上述の実施形態においては、モータの出力を制御するための制御量が、モータ電流とされていたが、本願発明はこれに限定されず、モータに印加される電圧値、あるいはそれ以外のパラメータを制御量とすることもできる。
【0037】
本願発明においては、移行制御マップに含まれるモータの出力を制御するための制御量と操舵トルクとの関係を定めたデータ(実施形態のデータD20〜D29に相当するデータ)の数を多くするほど、可変制御マップから固定制御マップに移行するときにその制御特性を小刻みに変化させることができ、好ましい。ただし、本願発明においては、移行制御マップに含まれるそれらのデータの具体的な数はとくに限定されるものではなく、要は複数あればよい。また、本願発明においては、移行制御マップ、可変制御マップ、および固定制御マップに含まれている各データの具体的な内容(数値)も、上述の実施形態の内容に限定されるものではない。
【図面の簡単な説明】
【図1】本願発明に係る電動式パワーステアリング装置の概略構成の一例を示すブロック図である。
【図2】可変制御マップの一例を示す説明図である。
【図3】固定制御マップおよび移行制御マップの一例を示す説明図である。
【図4】図1に示す電動式パワーステアリング装置のコントローラの動作手順の一例を示すフローチャートである。
【図5】図1に示す電動式パワーステアリング装置のコントローラの動作手順の一例を示すフローチャートである。
【図6】図1に示す電動式パワーステアリング装置のコントローラの動作手順の一例を示すフローチャートである。
【図7】従来技術において利用されていた可変制御マップおよび固定制御マップを示す説明図である。
【図8】従来技術において実行されていた演算処理を概念的に示す説明図である。
【符号の説明】
A 電動式パワーステアリング装置
M モータ
MP1 可変制御マップ
MP2 移行制御マップ
MP3 固定制御マップ
1 操舵トルク検出器
2 車速検出器
4 故障・故障復帰検出器
5 コントローラ
6 記憶装置
Claims (2)
- 操舵トルク検出手段と、車速検出手段と、この車速検出手段の異常を検出する異常検出手段と、操舵補助力を発生させるモータと、このモータの出力を制御するための制御量と操舵トルクとの関係を複数段階の車速ごとに定めた複数のデータを含む可変制御マップおよびこの可変制御マップの代替となる制御量と操舵トルクとの関係を定めたデータを含む固定制御マップが記憶されている記憶手段と、上記異常検出手段により異常が検出されていない通常時には、上記操舵トルク検出手段および上記車速検出手段により検出されたデータと上記可変制御マップとに基づいて上記モータを制御する一方、上記異常検出手段により異常が検出されたときには、上記モータの制御を上記固定制御マップを利用した制御に切り替えるコントローラと、を具備している、電動式パワーステアリング装置であって、
上記記憶手段には、制御量と操舵トルクとの関係を複数通り定めた複数のデータを含む移行制御マップがさらに記憶されており、かつ、
上記コントローラは、上記可変制御マップを利用した制御から上記固定制御マップを利用した制御に移行するときには、その移行途中において上記移行制御マップの複数のデータに基づく制御に順次切り替わることにより、上記可変制御マップを利用して実行されていた制御特性を上記固定制御マップを利用した制御特性に段階的に近づけるように構成されていることを特徴とする、電動式パワーステアリング装置。 - 上記コントローラは、上記異常検出手段により異常が検出されたときには、上記可変制御マップで利用されるデータを、上記モータの出力を小さくする特性をもつ他の複数のデータに順次切り替え、かつ上記モータの出力を最小とする特性のデータを利用した制御に移行した後に、上記移行制御マップを利用した制御に切り替わるように構成されている、請求項1に記載の電動式パワーステアリング装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2000226870A JP3779534B2 (ja) | 2000-07-27 | 2000-07-27 | 電動式パワーステアリング装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2000226870A JP3779534B2 (ja) | 2000-07-27 | 2000-07-27 | 電動式パワーステアリング装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2002037102A JP2002037102A (ja) | 2002-02-06 |
| JP3779534B2 true JP3779534B2 (ja) | 2006-05-31 |
Family
ID=18720411
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2000226870A Expired - Fee Related JP3779534B2 (ja) | 2000-07-27 | 2000-07-27 | 電動式パワーステアリング装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3779534B2 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006007860A (ja) * | 2004-06-23 | 2006-01-12 | Favess Co Ltd | 電動パワーステアリング装置 |
| JP5426686B2 (ja) * | 2009-10-20 | 2014-02-26 | 本田技研工業株式会社 | 電動パワーステアリング装置 |
| JP5728424B2 (ja) * | 2012-03-30 | 2015-06-03 | 本田技研工業株式会社 | 電動パワーステアリング装置 |
| JPWO2020115973A1 (ja) * | 2018-12-04 | 2021-10-28 | 日本精工株式会社 | 車両用操向装置 |
| JP7491802B2 (ja) | 2020-09-28 | 2024-05-28 | 株式会社ジェイテクト | 操舵制御装置 |
-
2000
- 2000-07-27 JP JP2000226870A patent/JP3779534B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2002037102A (ja) | 2002-02-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3127736B1 (en) | Regeneration control device of electrically driven vehicle | |
| JP4411514B2 (ja) | 電動パワーステアリング装置 | |
| JP3593898B2 (ja) | 操舵制御装置 | |
| EP2168830A2 (en) | Motor control method for electric-powered vehicle and driving apparatus for electric-powered vehicle | |
| JP3779534B2 (ja) | 電動式パワーステアリング装置 | |
| JPS6371482A (ja) | 動力舵取装置の操舵力制御装置 | |
| JP5775220B1 (ja) | フォークリフト及びフォークリフトの制御方法 | |
| WO2022045242A1 (ja) | パワーステアリング制御装置、及びパワーステアリング制御方法 | |
| US6608457B2 (en) | System for controlling electric power steering | |
| JP2011105103A (ja) | 電動パワーステアリング装置 | |
| JP3409323B2 (ja) | 車両用操舵制御装置 | |
| KR20210080659A (ko) | 후륜 조향 제어 장치 및 후륜 조향 제어 방법 | |
| JP3525478B2 (ja) | アクセル制御装置 | |
| JP2003320950A (ja) | 電気式動力舵取装置 | |
| JPH06312666A (ja) | 動力操舵装置 | |
| CN116209612A (zh) | 线控转向式转向装置 | |
| JP5125328B2 (ja) | 操舵制御装置 | |
| JP2005007991A (ja) | 電動パワーステアリング装置 | |
| JP6759836B2 (ja) | モータ制御装置 | |
| JP2004314909A (ja) | 電動パワーステアリング装置 | |
| JP2001088726A (ja) | 電動式パワーステアリングの制御方法 | |
| JP2000085603A (ja) | 操舵制御装置 | |
| JP5307583B2 (ja) | 電動車両のモータ制御方法および電動車両用駆動装置 | |
| KR20000019287A (ko) | 전동식 파워 스티어링 장치 | |
| JP4940709B2 (ja) | 操舵制御装置、自動車及び操舵制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20060221 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20060228 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20060302 |
|
| R150 | Certificate of patent (=grant) or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110310 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110310 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130310 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130310 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150310 Year of fee payment: 9 |
|
| LAPS | Cancellation because of no payment of annual fees |