JP3697397B2 - 狭ビーム指向装置および狭ビーム指向方法 - Google Patents
狭ビーム指向装置および狭ビーム指向方法 Download PDFInfo
- Publication number
- JP3697397B2 JP3697397B2 JP2001009804A JP2001009804A JP3697397B2 JP 3697397 B2 JP3697397 B2 JP 3697397B2 JP 2001009804 A JP2001009804 A JP 2001009804A JP 2001009804 A JP2001009804 A JP 2001009804A JP 3697397 B2 JP3697397 B2 JP 3697397B2
- Authority
- JP
- Japan
- Prior art keywords
- target
- signal
- tracking
- unit
- phased array
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images











Landscapes
- Aiming, Guidance, Guns With A Light Source, Armor, Camouflage, And Targets (AREA)
- Radar Systems Or Details Thereof (AREA)
Description
【発明の属する技術分野】
この発明は、アクティブフェーズドアレーアンテナ(APAA)を使用した狭ビーム指向装置の指向精度の向上に関するものである。
【0002】
【従来の技術】
一定の規則に従い配列した多数の素子アンテナの各々の励振電力および励振位相を調節して、アンテナ全体としての指向特性を制御するフェーズドアレイアンテナを、目標の大きさや移動速度等に応じてリアルタイムに制御する(アクティブフェーズドアレイアンテナ、以下APAAという)ことにより、従来のアンテナ系で得られなかった優れた指向制御性能や狭ビーム性能が得られる。
このような特性を利用して、対象とする目標のレーダ装置に強い電波を放射し、相手レーダの受信回路を飽和させるなどにより、相手レーダに影響を与える装置として利用することができる。
APAAのビームは、極めて狭角度とすることができ、そのゲインを高めることができる反面、目標を捕捉し続けることが難しくなり、対抗目標の追尾のために種々の工夫を必要とする。
以下、ここでは電波発射源を探知して、この発射源に対して強いビームを放射するビーム指向装置を例として説明する。
【0003】
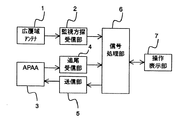
図15は、従来のビーム指向装置の概要を示すブロック図である。図において、1は目標の初期探知を行う広覆域アンテナ、2は広覆域アンテナ1で受信した信号から目標の周波数, パルス幅, パルス繰り返し周期等の目標電波諸元及び目標の方位を分析する監視方探受信部、3は目標信号を受信して送信部5からの種信号を増幅して相手電波発射源に電波を放射するとともに、放射を中断して受信も可能なAPAA、4はAPAAからの受信信号を解析して目標を追尾する追尾受信部、5は対抗目標に対抗するための送信種信号をAPAAに与える送信部、6は監視方探受信部2の受信結果から対抗する目標の有無を確認しそれが存在した場合はAPAAに切り換えて追尾受信及び送信を実施するよう指示を行う信号処理部で図示しないが対抗する目標の諸元の一覧表(対抗目標テーブル)を持っている。7は受信状況及び送信状況をオペレータに示し必要な場合オペレータが操作する操作表示部である。
【0004】
次に動作について説明する。
図16は、図15の従来のビーム指向装置の動作を示すフローチャートである。ステップS1で広覆域アンテナ1により信号を受信し、ステップS2で信号の有無の確認を行う。何も受信できなければステップS1へ戻るが、何らかの信号が受信された場合は、ステップS3で、監視方探受信部2により目標諸元及び目標方位の分析をおこない、ステップS4では信号処理部6で対抗目標テーブルとの比較を行って目標の有無を確認する。対抗目標テーブルと一致する目標がなければステップS1へ戻る。
対抗目標テーブルと一致する目標があった場合、これらのデータと方位情報とを用いて(これらを粗方探結果という)ステップS5のAPAA系に切り換えて受信し、ステップS6でまず受信信号の有無を確認し、確認出来なければ(目標を失探するという)ステップS7でアンテナのビーム指向方向の近辺を捜索受信して、それでも受信できなければステップS8でステップS1へ戻る。
ステップS6で受信が確認されるか、前述のステップS7の近辺捜索で受信できたときは、追尾受信部4で一致する目標を追尾(ステップS11)させるとともに、ステップS9で信号処理部6で規定した(あるいは操作表示部7で手動設定した)送信パラメータに従い送信部5で送信種信号を発生させて、APAA3により増幅して空中に放射する。ステップS9の送信開始後は、この送信の途中で時々受信に切り換えて追尾受信部4で目標の存在を確認するルックスルー受信(ステップS10)を行う。
【0005】
以上に説明した動作に於ける問題点の理解を助けるため、図17に広覆域アンテナ1の覆域Zと、広覆域アンテナ1による方位探知精度Z’と、APAA3のビーム幅Pを示す。110は目標である。
広覆域アンテナ1で広い覆域内Zを初期探知して、狭ビームPのAPAA系に移管する場合、APAA3は広覆域アンテナ1による方位探知精度Z’の幅の中に誘導される。このとき、Z’とPの関係が、例えば2Z’<Pの程度であれば問題はないが、方位探知精度Z’の幅が広ければ必ずしも目標110をAPAAで捕捉できるとは限らない。即ち、APAA3はビーム幅Pが狭いため、移管する前の広覆域アンテナ1による目標方位精度Z’がAPAA3のビーム幅Pより広ければ、目標を失探する恐れがある。
即ち、図17ではしばしば、Z>Z’>Pなる関係となっている。
しかし、広覆域アンテナ1の方位精度Z’の向上は広覆域性能と相反するため、広覆域性能を落とさないで方位精度を向上することは困難である。また、広覆域アンテナ1による目標探知は、アンテナ自身の利得が低いため、高感度化するのが難しく探知距離が短くなる。従って、目標方位精度を向上させる場合、装置の大型化やさらなる低感度化が生じてしまうことが懸念される。
【0006】
【発明が解決しようとする課題】
従来の狭ビーム指向装置は、以上のように構成されており、広覆域アンテナで広い覆域内を初期探知して目標を発見した後、狭ビームのAPAA系に移管する。しかし、APAAはビーム幅が狭いため、移管する前の広覆域アンテナによる目標方位精度がAPAAのビーム幅より広ければ目標を失探する恐れがある。
勿論、APAA系のビーム幅を広げることは意味がないし、また、広覆域アンテナの方探精度の向上は、アンテナ自身の利得が低いため、高感度化するのが難しく、探知距離が短くなるなどのため、装置の大型化やさらなる低感度化が懸念されて困難であり、結果としてAPAA系の狭ビーム性能を十分に活用することが出来ないという課題があった。
【0007】
この発明は、広覆域アンテナでの目標受信の後、APAA系に移管したとき、失探の恐れの少ないビーム指向装置を得ようとするものである。
【0008】
【課題を解決するための手段】
この発明による狭ビーム指向装置は、電波を発信した対抗目標の探知を行う広覆域アンテナ、
前記広覆域アンテナで受信した信号から前記電波の諸元及び前記目標の方位を分析して粗方探結果を出力する監視方探受信部、
前記監視方探受信部の分析結果と予め記憶した対抗目標のデータとを比較して目標の有無を確認し、前記目標を発見したとき目標認識信号を出力する信号処理部、
所定の方位探知精度を有するとともに、前記目標認識信号が出力されたとき前記広覆域アンテナの指向方向に指向する光学センサ、
前記光学センサの画像から前記目標を抽出して目標の方位を算出する画像処理部、
ビーム指向方向制御機能およびビーム幅制御機能を有するフェーズドアレイアンテナと、前記フェーズドアレイアンテナの受信信号を解析して目標を追尾する追尾受信部と、前記信号処理部の発信する前記目標認識信号を受けて前記分析結果にもとづき決定した電波諸元の送信信号を出力する送信部とを有し、前記目標の追尾と、前記送信信号の送出とを繰り返すアクティブフェーズドアレイアンテナ部とを備え、
前記アクティブフェーズドアレイアンテナ部の前記追尾受信部は、前記画像処理部が前記目標の方位を算出したときは算出された方位にもとづき前記追尾を開始し、前記画像処理部が前記目標を算出できないときは前記粗方探結果にもとづいて前記追尾を開始するものである。
【0009】
また、電波を発信した対抗目標の探知を行う広覆域アンテナ、
広覆域アンテナで受信した信号から電波の諸元及び目標の方位を分析する監視方探受信部、
監視方探受信部の分析結果と予め記憶した対抗目標のデータとを比較して、目標の有無を確認し、目標を発見したとき目標認識信号を出力する信号処理部、
広覆域アンテナの指向方向に指向し、所定の方位探知精度を有する光学センサ、
光学センサの画像から目標の可能性ある画像を抽出してその方位を算出する画像処理部、
画像処理部の算出した方位と信号処理部の確認した目標とから目標の方位を確定するデータ統合処理部、
ビーム指向方向制御機能およびビーム幅制御機能を有するフェーズドアレイアンテナと、フェーズドアレイアンテナの受信信号を解析して目標を追尾する追尾受信部と、信号処理部の発信する目標認識信号を受けて分析結果にもとづき決定した電波諸元の送信信号を出力する送信部とを有し、目標の追尾と、送信信号の送出とを繰り返すアクティブフェーズドアレイアンテナ部とを備え、
アクティブフェーズドアレイアンテナ部の追尾受信部は、データ統合処理部の処理した目標の方位にもとづき追尾を開始するものである。
【0010】
また、フェーズドアレイアンテナの追尾受信部が目標の信号を受信出来なかったとき、送信部は信号処理部の分析結果に基づく周波数よりも広帯域の周波数の電波を送信する失探処理を行うことにより、対抗目標に強電界の電波を放射し続けるものである。
【0011】
また、電波を発信した対抗目標の探知を行う広覆域アンテナ、
広覆域アンテナで受信した信号から電波の諸元及び目標の方位を分析する監視方探受信部、
監視方探受信部の分析結果と予め記憶した対抗目標のデータとを比較して、目標の有無を確認し、目標を発見したとき目標認識信号を出力する信号処理部、
広覆域アンテナの指向方向に指向し、広覆域アンテナと同等の視野角と所定の方位探知精度を有する光学センサ、
光学センサの画像と監視方探受信部の分析した方位とから目標を抽出して目標の方位を算出する画像処理部、
ビーム指向方向制御機能およびビーム幅制御機能を有するフェーズドアレイアンテナと、画像処理部の算出した目標の方位にもとづき追尾する光学系追尾部と、信号処理部の発信する目標認識信号を受けて分析結果にもとづき決定した電波諸元の送信信号を出力する送信部とを有し、目標を追尾しつつ送信信号を連続的に送出するアクティブフェーズドアレイアンテナ部とを備えたものである。
【0012】
また、光学センサは指向方向を制御する駆動制御部を備えるとともに、光学センサの視野角は広覆域アンテナの方位探知精度の1倍以上、2倍以下にしたものである。
【0013】
また、光学センサはその視野角が制御可能なものである。
【0014】
また、光学センサは2次元撮像素子を備えたものである。
【0015】
この発明による狭ビーム指向方法は、広覆域アンテナで受信した電波の諸元を解析してその方位を分析する監視方探手順と、
所定の方位探知精度を有する光学センサを広覆域アンテナの指向方向に指向し、光学センサの画像から目標を抽出してその方位を算出する画像処理手順と、
画像処理手順で得た目標の方位にフェーズドアレイアンテナを指向させた後、フェーズドアレイアンテナの受信信号にもとづきフェーズドアレイアンテナに目標を追尾させるとともに、フェーズドアレイアンテナから電波を放射するフェーズドアレイアンテナ系追尾送信手順とを含むものである。
【0016】
また、監視方探手順と画像処理手順とを同時に実施するものである。
【0017】
また、フェーズドアレイアンテナ系追尾送信手順において目標の信号を受信出来なかったとき、送信周波数の帯域幅をより広帯域に変化させて送信する失探処理手順を含むものである。
【0018】
また、広覆域アンテナで受信した電波の諸元を解析してその方位を分析する監視方探手順と、
所定の方位探知精度を有する光学センサを広覆域アンテナの指向方向に指向し、光学センサの画像から目標を抽出してその方位を算出するとともに、この画像により目標を追尾する画像追尾手順と、
画像追尾手順で得た目標の方位にフェーズドアレイアンテナを指向させた後、フェーズドアレイアンテナから電波を連続的に放射する連続送信手順とを含むものである。
【0019】
【発明の実施の形態】
実施の形態1.
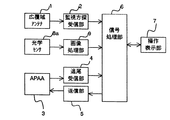
図1は、この発明の実施の形態1を示すブロック図である。図において、1は目標の初期探知を行う広覆域アンテナ、2は広覆域アンテナ1で受信した信号から目標の周波数, パルス幅, パルス繰り返し周期等の目標電波諸元及び目標の方位を分析する監視方探受信部、3は目標信号を受信して、送信部5からの種信号を増幅して空中に放射するアクティブフェーズドアレイアンテナ(以下APAA)でビーム指向方向制御機能とビーム幅制御機能とを備えている。
4はAPAAからの受信信号を解析して目標を追尾する追尾受信部、5は受信目標に対抗するための送信種信号をAPAAに与える送信部、6は監視方探受信部2の受信結果から対抗する目標の有無を確認しそれが存在した場合はAPAA3に切り換えて追尾受信及び送信を実施するよう指示を行う(目標認識信号と言う)信号処理部で図示しないが対抗する目標の諸元の一覧表(対抗目標テーブル)を持っている。7は受信状況及び送信状況をオペレータに示し必要な場合オペレータが操作する操作表示部である。なお、以下の説明でAPAA3と追尾受信部4と送信部5を含む部分をAPAA系またはアクティブフェーズドアレイアンテナ部と呼ぶ。
【0020】
8aは広覆域アンテナ1と同等の視野角とAPAA3の方位精度より高い方位探知精度を備えた光学センサで例えば2次元赤外線撮像素子を使用する。9は光学センサ8aから得られた画像から目標信号を抽出して目標の方位を算出する画像処理部である。
【0021】
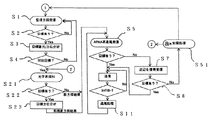
図2は、この発明の実施の形態1を示すフローチャートである。以下各フローチャート図において、ステップS1〜ステップS11は、従来の説明の図12で説明した同符号のステップと同じであるので詳細な説明は省略する。
光学センサ8aは歪曲の少ないレンズを使用すれば、視野角/素子数の角度分解能が得られ(ここで言う素子数は画像変換素子の素子数である)、これはその視野角の割りに極めて高精度の分解能である。従って、画素数の多い二次元撮像素子を使用すれば、視野角が広覆域アンテナ1と同等であっても、角度分解能を向上し、電波による方位探知よりも(広覆域アンテナ1は言うに及ばす、APAA3のビーム幅Pよりも)はるかに高い角度分解能が得られる。
【0022】
図2のステップS4において目標有りと判定したとき、ステップS21の光学系探知に切り換える。そしてステップS22で目標画像が捕らえられなければ、従来と同様に広覆域アンテナ1による粗方探結果を用いてAPAA系に移行する。また、目標画像が捕らえられたときはステップS23で目標方位を分析し、その結果(高精度方探結果という)を用いてAPAA系のステップS5に移行する。
図3は広覆域アンテナ1による覆域Zとその方位精度Z’、光学センサ8aによる覆域Aとその方位精度A’、APAA3による覆域Pとの関係を説明するための特性比較図である。
図に示すとおり
Z ≒A>Z’>A’ …(1)
A’≦P …(2)
となるように各装置の性能が決定されている。
式(1)ではAがほぼZに等しい程度とすることにより、失探の発生をより少なくしている。
【0023】
図2に於いて、ステップS3で目標の電波探知分析ができているにもかかわらずステップS22で目標を光学探知できない場合を想定しているが、これは光学探知の特性として、気象条件その他の外乱により、電波探知が可能でも光学探知が出来ない場合を想定したもので、光学探知系をAPAA系に移行する必須の方位確定手段としていない理由もここにある。
従来の装置では、監視方探受信結果である粗方探結果を基準として、APAA系を動作させていたが、本実施の形態では、粗方探結果を基準としてまず光学センサによる探知を行い。次に光学センサ系による高精度方探結果を入力してAPAA系に移管することで、APAA系移管時の失探を低減することができる。
【0024】
図2のステップS1〜S4は、この発明に言う監視方探手順である。
ステップS5はこの発明に言う追尾受信手順である。
ステップS21〜S23は、この発明に言う画像処理手順である。
ステップS5〜S11は、この発明に言うフェーズドアレイアンテナ系追尾送信手順である。
【0025】
実施の形態2.
図4は、この発明の実施の形態2を示すフローチャートである。実施の形態1と同じ目的、同じ効果を得る他の方法であるが、広覆域アンテナ系の処理(ステップS1〜ステップS4)と、光学センサ系の処理(ステップS21〜ステップS23)とを時間的に並列に行う(同時に実施する)ことにより、この発明の実施の形態1で説明した広覆域アンテナ系の処理後に光学センサ系の処理を実施する場合よりも処理時間が短縮されるという効果が得られる。
【0026】
ステップS31ではそれぞれに処理した結果をデータ統合処理してAPAA系に移管する。図に詳細は示さないが、ここでいうデータ統合処理とは、例えば光学系の高精度方探結果データがあればこれを用い、なければ広覆域アンテナ系の粗方探結果を用いるという意味であり、また、(光学系の視野角)≠(広覆域アンテナの覆域角)である場合に、粗方探結果を用いて光学系を誘導するなどの処理を含むものである。ステップS31はこの発明に言うデータ統合処理手順である。
【0027】
実施の形態3.
図5、図6は、この発明の実施の形態3を示すフローチャートである。この発明の実施の形態1では、APAA系で追尾受信中のルックスルーで目標を失探した場合、監視方探受信に戻らなければならない。これは方探を最初からやり直すということで時間がかかりすぎる。一方、APAA系で失探してしまう理由の多くは、対象目標が被探知、妨害回避を目的として例えば使用周波数その他の電波諸元を変更してしまったという理由が多いので、例えば、対抗目標が周波数を変化させた場合、図6に示すように広帯域周波数で送受信する失探処理を実施する。
【0028】
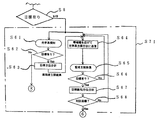
図5はステップS51の失探処理以外の部分は図2と同じなので詳細な説明を省略する。図6は図5のステップS51の失探処理の詳細を示すものである。図5のステップS8でNoであった場合、ステップS61〜ステップS63の光学系方探を実行するとともに(ステップS61は図2のステップS21、ステップS62はステップS22、ステップS63はステップS23とそれぞれ処理後の移行先は異なるものの同じ内容であるので説明は省略する)、ステップS64で光学センサ8aの方探結果で目標を追尾し、広帯域の送信を実施することにより、対抗目標レーダに強電界電波放射の効果を与え続けることができる。また、ステップS67で新たな目標諸元/方位分析結果を得れば旧データの更新を行うとともに本来のステップ(図5のステップS21)に戻る。
ステップS61〜62の光学系探知でも目標を見失った場合は本来のステップS1へ戻る。
図6のステップS61〜S68はこの発明に言う失探処理または失探処理手順である。
【0029】
実施の形態4.
図7、図8は、この発明の実施の形態4を示すフローチャートである。
本実施の形態は、実施の形態2の図4のフローに、実施の形態3で説明した図6の失探処理(ステップの移行先は無論異なっている)を実施することにより、失探した場合でも対抗目標レーダに効果を与え続けることができるようにしたものである。
図7の失探処理ステップS71は図8に詳細を示す。図8のステップS71の中のステップS61〜ステップS68は、図6の同符号のステップと下記の点を除いて同内容なので詳細な説明を省略する。即ち、光学探知のステップS62で目標を捕捉出来なかったときはステップS1の監視方探およびステップS21の光学方探の両方へ戻り、探知を最初からやり直す。また、ステップS68で、捕捉した目標が対抗目標であると判定されたときはステップS31のデータ統合処理にもどってデータを更新する。
【0030】
実施の形態5.
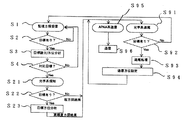
図9は、この発明の実施の形態5を示すフローチャートである。対抗目標が周波数変化等しないとわかっている単純なレーダの場合は、ステップS91〜ステップS94で目標方位の追尾を光学系センサで行う。ステップS95〜ステップS96でAPAAは光学系による目標方位情報を元に送信方位を修正しつつ連続的に送信(ときどき受信に切り替えて失探していないか確かめるルツクスルーを行わないという意味)することができるので、相手目標への送信を断絶させる必要がなく、効果をより高めることが出来る。
図9のステップS91〜S93はこの発明に言う画像追尾手順である。
ステップS94〜S96はこの発明に言う連続送信手順である。
【0031】
実施の形態6.
図10は、この発明の実施の形態6を示すフローチャートである。実施の形態5の監視方探受信(S1〜)と光学系探知(S21〜)とを並列に処理するもので、対抗目標が周波数変化等しないとわかっている単純なレーダの場合は、ステップS91〜ステップS94で目標方位の追尾を光学系センサで行う。ステップS95〜ステップS96でAPAAは光学系による目標方位情報を元に送信方位を修正しつつ常時送信(ルツクスルーなしという意味)することができるので、相手目標への送信を断絶させる必要がなく、効果をより高めることが出来る。
更に、加えて、目標を見失った後の処理が高速化されるという効果が得られる。
【0032】
実施の形態7.
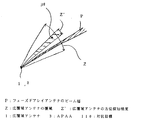
図11は、この発明の実施の形態7を示すブロック図である。また、図11の構成に於ける各センサの覆域(又は視野角)の相互の関係を図12に示す。即ち本実施の形態では、光学センサ8bの視野角Bは広覆域アンテナ1の覆域Zよりはるかに狭く、その方位精度Z’より若干広い程度(例えば1Z’以上で2Z’以下)の視野角とし、視野の移動は駆動制御部10で光学センサ8aの視軸を変化させる機構としている。
図12において、
Z>B≧Z’>B’ …(3)
B’≦P …(4)
(3)でBがZ’にほぼ等しい程度とすることによって、その光学センサの方位探知精度を高め、広覆域アンテナ系で探知した目標方位に光学センサを指向させたとき、詳細な方位を光学センサの画像データから得ることができる。
【0033】
実施の形態8.
図13は、この発明の実施の形態8を示すブロック図である。8cは視野角切換型(例えばズーミングのように連続的な変化を含む)の光学センサであり、その視野角は、初期探知では広視野角、光学系または広覆域アンテナ系の初期探知後は狭視野角に切り換えて、探知した目標方位に光学センサを指向させ、より詳細な方位を光学センサの画像データから得ることができる。図13の構成に於ける各センサの覆域(又は視野角)の相互の関係を図14に示す。
図14において、C(広)は光学センサ8cの広視野角を、C(狭)は光学センサ8cの狭視野角を示し、C’(広)、C’(狭)はそれぞれの方位探知精度を示している。
図に於いて、
Z ≧C(広)>C(狭)≧Z’>C’(広)>C’(狭) …(5)
C’(広)≦P …(6)
【0034】
【発明の効果】
以上のようにこの発明によれば、光学センサの高い方位探知精度を用いて狭ビーム指向装置のフェーズドアレイアンテナを制御しているので、フェーズドアレイアンテナへの移管時における失探の恐れを少なくすることができる。
【0035】
また、光学センサによる方探と広覆域アンテナによる方探とを並列に実施しているので、方探時間をより短縮できる。
【0036】
また、フェーズドアレイアンテナが失探したとき、より広帯域の電波を放射するので、失探中も対抗目標に影響を与えつづけることができる。
【0037】
また、光学センサによる追尾を行い、この光学センサの方位探知データにもとづきフェーズドアレイアンテナの指向制御を行うことにより、連続的に電波放射を行うことができ、対抗目標により大きな効果を与えることができる。
【0038】
また、光学センサは広覆域アンテナの方位探知精度より広く、その覆域より狭い視野角と、指向方向の駆動制御部とを備えているので、光学センサによる方位探知精度をより高めることができる。
【0039】
また、光学センサの視野角は可変なので、必要時に必要な方位探知精度を得ることができ、目標を失探する恐れをより少なくすることができる。
【0040】
また、光学センサとして2次元撮像素子を用いているので容易に方位探知精度を高めることができる。
【0041】
この発明による狭ビーム指向方法によれば、画像処理手順により目標の方向にフェーズドアレイアンテナを指向させたのち、フェーズドアレイアンテナの受信により目標を追尾しているので、広覆域アンテナからフェーズドアレイアンテナに移管したとき失探する恐れが少ない。
【0042】
また、広覆域アンテナによる探知と光学センサによる探知とを同時刻に実施するので探知時間を短縮できる。
【0043】
また、目標の信号を受信できなかったとき、送信周波数の帯域幅をより広帯域に変化させて送信する失探処理手順を含むので、失探の可能性をより低減することができる。
【0044】
また、画像追尾手順によってフェーズドアレイアンテナを指向させた後、フェーズドアレイアンテナから電波を連続的に放射する連続送信手順を含むので、失探中にも対抗目標に効果を与え続けることができる。
【図面の簡単な説明】
【図1】 この発明の実施の形態1による狭ビーム指向装置の構成を示すブロック図である。
【図2】 図1の狭ビーム指向装置の動作を示すフローチャートである。
【図3】 図1の狭ビーム指向装置の動作を説明するための各センサの性能比較説明図である。
【図4】 この発明の実施の形態2による狭ビーム指向装置の動作を示すフローチャートである。
【図5】 この発明の実施の形態3による狭ビーム指向装置の動作を示すフローチャートである。
【図6】 図5のフローチャートの部分を詳細に示すフローチャートである。
【図7】 この発明の実施の形態4による狭ビーム指向装置の動作を示すフローチャートである。
【図8】 図7のフローチャートの部分を詳細に示すフローチャートである。
【図9】 この発明の実施の形態5による狭ビーム指向装置の動作を示すフローチャートである。
【図10】 この発明の実施の形態6による狭ビーム指向装置の動作を示すフローチャートである。
【図11】 この発明の実施の形態7による狭ビーム指向装置の構成を示すブロック図である。
【図12】 図11の狭ビーム指向装置の特性を示す特性比較図である。
【図13】 この発明の実施の形態8による狭ビーム指向装置を示すブロック図である。
【図14】 図13の狭ビーム指向装置の特性を示す特性比較図である。
【図15】 従来の狭ビーム指向装置を示すブロック図である。
【図16】 図15の狭ビーム指向装置の動作を示すフローチャートである。
【図17】 図15の狭ビーム指向装置の特性を示す特性図である。
【符号の説明】
1 広覆域アンテナ、 2 監視方探受信部、
3 アクティブフェーズドアレイアンテナ、 4 追尾受信部、
5 送信部、 6 信号処理部、 7 操作表示部、 8a 光学センサ、
8b 光学センサ、 8c 光学センサ、 9 画像処理部、
10 駆動制御部、
A 光学センサ8aの視野角、 A’ 光学センサ8aの方位探知精度、
B 光学センサ8bの視野角、 B’ 光学センサ8bの方位探知精度、
C 光学センサ8cの視野角、 C’ 光学センサ8cの方位探知精度、
P フェーズドアレイアンテナのビーム角、
Z 広覆域アンテナの覆域、 Z’ 広覆域アンテナの方位探知精度。
Claims (10)
- 電波を発信した対抗目標の探知を行う広覆域アンテナ、
前記広覆域アンテナで受信した信号から前記電波の諸元及び前記目標の方位を分析して粗方探結果を出力する監視方探受信部、
前記監視方探受信部の分析結果と予め記憶した対抗目標のデータとを比較して目標の有無を確認し、前記目標を発見したとき目標認識信号を出力する信号処理部、
所定の方位探知精度を有するとともに、前記目標認識信号が出力されたとき前記広覆域アンテナの指向方向に指向する光学センサ、
前記光学センサの画像から前記目標を抽出して目標の方位を算出する画像処理部、
ビーム指向方向制御機能およびビーム幅制御機能を有するフェーズドアレイアンテナと、前記フェーズドアレイアンテナの受信信号を解析して目標を追尾する追尾受信部と、前記信号処理部の発信する前記目標認識信号を受けて前記分析結果にもとづき決定した電波諸元の送信信号を出力する送信部とを有し、前記目標の追尾と、前記送信信号の送出とを繰り返すアクティブフェーズドアレイアンテナ部とを備え、
前記アクティブフェーズドアレイアンテナ部の前記追尾受信部は、前記画像処理部が前記目標の方位を算出したときは算出された方位にもとづき前記追尾を開始し、前記画像処理部が前記目標を算出できないときは前記粗方探結果にもとづいて前記追尾を開始することを特徴とした狭ビーム指向装置。 - 前記アクティブフェーズドアレイアンテナ部の前記追尾受信部が目標の信号を受信出来なかったとき、前記送信部は前記信号処理部の分析結果に基づく周波数よりも広帯域の周波数の電波を送信する失探処理を行うことにより、前記対抗目標に強電界の電波を放射し続けることを特徴とする請求項1に記載の狭ビーム指向装置。
- 電波を発信した対抗目標の探知を行う広覆域アンテナ、
前記広覆域アンテナで受信した信号から前記電波の諸元及び前記目標の方位を分析する監視方探受信部、
前記監視方探受信部の分析結果と予め記憶した対抗目標のデータとを比較して目標の有無を確認し、前記目標を発見したとき目標認識信号を出力する信号処理部、
前記広覆域アンテナの指向方向に指向し、所定の方位探知精度を有する光学センサ、
前記光学センサの画像から前記目標の可能性ある画像を抽出してその方位を算出する画像処理部、
前記画像処理部の算出した方位と前記信号処理部の確認した目標とから前記目標の方位を確定するデータ統合処理部、
ビーム指向方向制御機能およびビーム幅制御機能を有するフェーズドアレイアンテナと、前記データ統合処理部の処理した前記目標の方位にもとづき追尾を開始し、前記フェーズドアレイアンテナの受信信号を解析して目標を追尾する追尾受信部と、前記信号処理部の発信する前記目標認識信号を受けて前記分析結果にもとづき決定した電波諸元の送信信号を出力するとともに、前記追尾受信部が目標の信号を受信出来なかったとき、前記信号処理部の分析結果に基づく周波数よりも広帯域の周波数の電波を送信する失探処理を行うことにより、前記対抗目標に強電界の電波を放射し続ける送信部とを有し、前記目標の追尾と、前記送信信号の送出とを繰り返すアクティブフェーズドアレイアンテナ部とを備えたことを特徴とする狭ビーム指向装置。 - 電波を発信した対抗目標の探知を行う広覆域アンテナ、
前記広覆域アンテナで受信した信号から前記電波の諸元及び前記目標の方位を分析する監視方探受信部、
前記監視方探受信部の分析結果と予め記憶した対抗目標のデータとを比較して目標の有無を確認し、前記目標を発見したとき目標認識信号を出力する信号処理部、
前記広覆域アンテナと同等の視野角と所定の方位探知精度を有し、前記監視方探受信部の分析した目標の方位に指向する光学センサ、
前記光学センサの画像から前記目標を抽出して目標の方位を算出する画像処理部、
ビーム指向方向制御機能およびビーム幅制御機能を有するフェーズドアレイアンテナと、前記画像処理部の算出した前記目標の方位にもとづき追尾する光学系追尾部と、前記信号処理部の発信する前記目標認識信号を受けて前記分析結果にもとづき決定した電波諸元の送信信号を出力する送信部とを有し、前記目標を追尾しつつ前記送信信号を連続的に送出するアクティブフェーズドアレイアンテナ部とを備えたことを特徴とする狭ビーム指向装置。 - 光学センサは指向方向を制御する駆動制御部を備えるとともに、前記光学センサの視野角は広覆域アンテナの方位探知精度の1倍以上2倍以下としたことを特徴とする請求項1〜3のいずれか一項に記載の狭ビーム指向装置。
- 光学センサはその視野角が制御可能であることを特徴とする請求項1乃至5のいずれか一項に記載の狭ビーム指向装置。
- 光学センサは二次元赤外線撮像素子を備えたことを特徴とする請求項1乃至6のいずれか一項に記載の狭ビーム指向装置。
- 広覆域アンテナで受信した電波の諸元を解析してその方位を分析して粗方探結果を出力する監視方探手順と、
所定の方位探知精度を有する光学センサを前記広覆域アンテナの指向方向に指向し、前記光学センサの画像から目標を抽出してその方位を算出する画像処理手順と、
前記画像処理手順で前記目標の方位が得られたときは前記フェーズドアレイアンテナを得られた目標の方位に指向させ、前記画像処理手順により前記目標の方位が算出できなかったときは前記粗方探結果にもとづいて前記フェーズドアレイアンテナを指向させた後、前記フェーズドアレイアンテナの受信信号にもとづき前記フェーズドアレイアンテナに前記目標を追尾させ前記フェーズドアレイアンテナから電波を放射するフェーズドアレイアンテナ系追尾送信手順とを含むことを特徴とする狭ビーム指向方法。 - フェーズドアレイアンテナ系追尾送信手順において、目標の信号を受信出来なかったとき、送信周波数の帯域幅をより広帯域に変化させて送信する失探処理手順を含むことを特徴とする請求項8に記載の狭ビーム指向方法。
- 広覆域アンテナで受信した電波の諸元を解析して予め記憶した対抗目標のデータと比較して目標の有無を確認し、その方位を分析する監視方探手順と、
所定の方位探知精度を有する光学センサを前記広覆域アンテナの指向方向に指向し、前記光学センサの画像から目標を抽出してその方位を算出する画像処理手順と、
前記画像処理手順で算出した方位と前記監視方探手順で得た目標とから前記目標の方位を確定するデータ統合処理手順と、
前記データ統合処理手順で得た前記目標の方位にもとづき追尾を開始し、前記受信信号を解析して目標を追尾する追尾受信手順と、前記追尾受信手順で目標の信号を受信出来なかったとき、前記監視方探手順の結果に基づく前記電波諸元の周波数よりも広帯域の周波数の電波を送信する失探処理を行うことにより、前記対抗目標に強電界の電波を放射し続ける連続送信手順とを含むことを特徴とする狭ビーム指向方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2001009804A JP3697397B2 (ja) | 2001-01-18 | 2001-01-18 | 狭ビーム指向装置および狭ビーム指向方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2001009804A JP3697397B2 (ja) | 2001-01-18 | 2001-01-18 | 狭ビーム指向装置および狭ビーム指向方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2002214325A JP2002214325A (ja) | 2002-07-31 |
| JP3697397B2 true JP3697397B2 (ja) | 2005-09-21 |
Family
ID=18877229
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2001009804A Expired - Fee Related JP3697397B2 (ja) | 2001-01-18 | 2001-01-18 | 狭ビーム指向装置および狭ビーム指向方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3697397B2 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006234513A (ja) * | 2005-02-23 | 2006-09-07 | Toyota Central Res & Dev Lab Inc | 障害物検出装置 |
| JP2006258507A (ja) * | 2005-03-15 | 2006-09-28 | Omron Corp | 前方物体認識装置 |
| US10823820B2 (en) * | 2016-03-04 | 2020-11-03 | Mitsubishi Electric Corporation | Radar and beam control method |
| CN109031280B (zh) * | 2018-06-25 | 2023-08-11 | 中国海洋大学 | 一种基于相控阵天线的时间式信标回收机及回收方法 |
-
2001
- 2001-01-18 JP JP2001009804A patent/JP3697397B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2002214325A (ja) | 2002-07-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101764570B1 (ko) | 전파간섭 회피를 위한 레이더 장치 및 그를 위한 방법 | |
| JP3441326B2 (ja) | レーダ装置 | |
| US20210083395A1 (en) | Method and apparatus for object detection incorporating metamaterial antenna side lobe features | |
| JP3623183B2 (ja) | レーダ装置 | |
| JPS62108175A (ja) | レ−ダ装置 | |
| EP1533627B1 (en) | Radar | |
| JP3697397B2 (ja) | 狭ビーム指向装置および狭ビーム指向方法 | |
| US12607734B2 (en) | Radar device and radar method | |
| JP3458066B2 (ja) | レーダ装置および制御方法 | |
| JPH026029B2 (ja) | ||
| JP2716604B2 (ja) | 目標検出装置および目標検出方法 | |
| JPH10282231A (ja) | レーダ装置 | |
| US12553702B2 (en) | Distance estimation device, antenna device, feed system, feed device, and feed method | |
| JPH01262492A (ja) | レーダ装置 | |
| KR102763714B1 (ko) | 저전력으로 장애물의 정확한 탐지가 가능한 드론용 충돌방지 레이더 장치 및 방법 | |
| JPH03282389A (ja) | 精測進入レーダ | |
| JP2000155166A (ja) | 対目標レーダシステム | |
| Álvarez-Narciandi et al. | Last advances in freehand sensing for mmWave imaging | |
| JP3456148B2 (ja) | レーダ装置およびビーム制御方法 | |
| JP2002122398A (ja) | 誘導装置 | |
| JP2002022819A (ja) | 電子走査型レーダ装置及び測角処理方法 | |
| JP2003207563A (ja) | レーダ装置 | |
| JPS60128376A (ja) | レ−ダ装置 | |
| JPH03282286A (ja) | 目標検出方法及びその装置 | |
| JPH02198383A (ja) | 目標捜索方式 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20040601 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20040817 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20041013 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20050628 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20050704 |
|
| LAPS | Cancellation because of no payment of annual fees |