JP3615980B2 - 車輪測定装置 - Google Patents
車輪測定装置 Download PDFInfo
- Publication number
- JP3615980B2 JP3615980B2 JP2000034945A JP2000034945A JP3615980B2 JP 3615980 B2 JP3615980 B2 JP 3615980B2 JP 2000034945 A JP2000034945 A JP 2000034945A JP 2000034945 A JP2000034945 A JP 2000034945A JP 3615980 B2 JP3615980 B2 JP 3615980B2
- Authority
- JP
- Japan
- Prior art keywords
- wheel
- flange
- image
- tread
- point
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images

















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01M—TESTING STATIC OR DYNAMIC BALANCE OF MACHINES OR STRUCTURES; TESTING OF STRUCTURES OR APPARATUS, NOT OTHERWISE PROVIDED FOR
- G01M17/00—Testing of vehicles
- G01M17/08—Railway vehicles
- G01M17/10—Suspensions, axles or wheels
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/24—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures
- G01B11/25—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures by projecting a pattern, e.g. one or more lines, moiré fringes on the object
- G01B11/2545—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures by projecting a pattern, e.g. one or more lines, moiré fringes on the object with one projection direction and several detection directions, e.g. stereo
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61K—AUXILIARY EQUIPMENT SPECIALLY ADAPTED FOR RAILWAYS, NOT OTHERWISE PROVIDED FOR
- B61K9/00—Railway vehicle profile gauges; Detecting or indicating overheating of components; Apparatus on locomotives or cars to indicate bad track sections; General design of track recording vehicles
- B61K9/12—Measuring or surveying wheel-rims
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/08—Measuring arrangements characterised by the use of optical techniques for measuring diameters
- G01B11/10—Measuring arrangements characterised by the use of optical techniques for measuring diameters of objects while moving
- G01B11/105—Measuring arrangements characterised by the use of optical techniques for measuring diameters of objects while moving using photoelectric detection means
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/24—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures
- G01B11/25—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures by projecting a pattern, e.g. one or more lines, moiré fringes on the object
- G01B11/2531—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures by projecting a pattern, e.g. one or more lines, moiré fringes on the object using several gratings, projected with variable angle of incidence on the object, and one detection device
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/50—Depth or shape recovery
- G06T7/521—Depth or shape recovery from laser ranging, e.g. using interferometry; from the projection of structured light
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Optics & Photonics (AREA)
- Theoretical Computer Science (AREA)
- Mechanical Engineering (AREA)
- Length Measuring Devices By Optical Means (AREA)
Description
【発明の属する技術分野】
この発明は、例えば鉄道車両の車輪を測定する車輪測定装置に関するものである。
【0002】
【従来の技術】
図17は、例えば特開平7−91918公報に示された従来の車輪測定装置を示す構成図である。
【0003】
図17において、地上に設置されたレーザ光源10から出射された細線状光線10aは、レール6上の車輪1のフランジ3および踏面4に照射される。地上に設置されたレーザ光源11から照射された細線状光線11aは、車輪1の内側側面2に照射される。車輪1の踏面4に光が照射されている部分は、地上に設置された撮影装置12により撮影され、車輪1の内側側面2の光が照射されている部分は、内側側面2から撮影装置13により撮影される。
【0004】
撮影装置12および13から出力される映像信号は、画像信号処理装置15に送られる。画像信号処理装置15は、入力された映像信号をディジタル変換し、その画像データに対して画像処理を行ない、フランジ厚さF、フランジ高さH、車輪径D、踏面勾配α、フランジ角度φ、フランジ先端寸法Sなどの寸法を算出する。
【0005】
なお、レーザ光源10、レーザ光源11から照射される2本の細線状の光線10a、11aは、車輪1の中心と踏面4を結ぶ直線上に一致しており、光電スイッチ14により車輪1が検出されたタイミングに従い撮影装置12、13により映像入力が行なわれる。
【0006】
図18は、図17で測定される車輪1の踏面4および内側側面2の輪郭を示したものである。車輪1の形状は、フランジ厚さF、フランジ高さH、車輪径D、踏面勾配α、フランジ角度φ、フランジ先端寸法Sによって表わされる。
【0007】
図18において、点P、点Q、点R、点Uおよび点Vは測定基準位置であり、点Pはフランジ3の先端、点Rは内側側面2から車輪厚さ方向に所定寸法Bだけ離れた踏面4上の点、点Qは点Rから車輪径方向に所定寸法Kだけ離れたフランジ内側曲面上の点である。点Uは、車輪1が摩耗した場合に生じるフランジ内側の角であり、摩耗の少ない車輪では存在しない。点Vは、内側側面2に設けられた基準溝5の寸法基準となる壁の先端である。
【0008】
そして、車輪径Dは点Rを通る車輪1の直径であり、フランジ厚さFは点Bから内側側面2までの車輪厚さ方向の距離であり、フランジ高さHは点Pから点Rまでの車輪径方向の距離である。また、踏面勾配αは点Rにおける踏面の勾配であり、フランジ角度φは点Qから点Uの間の直線に近い部分の勾配と内側側面2とのなす角度であり、フランジ先端寸法Sは点Pと点Sの間の車輪径方向の距離である。
【0009】
撮影装置12は図18の範囲16に、撮影装置13は図18の範囲17に、それぞれ対応したレーザ光の反射像を含む映像を撮影する。撮影された映像は、画像信号処理装置15によって画像データに変換した後、画像処理を行なってレーザ光像の形状から車輪各部の寸法を求める。
【0010】
フランジ厚さF、フランジ高さH、踏面勾配α、フランジ角度φおよびフランジ先端寸法Sは、いずれも撮影装置12により得られた図18の範囲16に対応する画像上で算出される。車輪径Dは次のようにして算出される。すなわち、撮影装置13により得られた図18の範囲17に対応する画像上で、車輪1の内側側面2に彫り込まれた基準溝5の点Vからフランジ3先端Pまでの寸法Cを求め、既に得られているフランジ高さHを減じた後、基準溝5の直径が既知であるとして車輪径Dを求めている。
【0011】
【発明が解決しようとする課題】
従来の車輪測定装置は以上のような構成と寸法の算出処理を行なっているので、レーザ光の像が図18に示す断面形状の通りの明瞭な映像であればよいが、実際の車輪を撮影した画像においては、以下に示すような画像上の問題が発生するため、正しい寸法が算出できない場合があり、それに関する解決策は示されていない。
【0012】
まず第1に、実際の車輪1では、レールとの接触によって、図18に示す踏面4からフランジ内側U点付近までの範囲が研磨され鏡面に近い状態となり、光学的には乱反射より正反射に近い状態になっている。このような車輪1が対象でしかも周囲が明るい場合、撮影装置12で撮影される車輪踏面画像は、図19に示すような画像となる。図19において、踏面19およびフランジ内側部分20のレーザ光反射映像は乱反射光であるため前記理由により光量が少なくなり、鏡面でないフランジ先端付近21では光量が多くなりアンバランスとなる。また、周囲の明るい光が車輪1で正反射されて図18に示すような外乱光の像が表われ、レーザ光との区別が困難となるため、対策を講じない限り外乱光18の一部を誤って車輪断面形状と見なしてしまい、一部または全部の寸法計測が不能となったり大きな誤差が生じたりする。
【0013】
第2に、実際の車輪1を撮影装置13で撮影した画像は図20に示すようになり、フランジ先端部22の像は、汚れの付着に起因する反射率のむらがある場合に、図18の先端点Pまでくっきりと見えないことがあり、この場合、図18の寸法Cが実際より短く算出されてしまう。
【0014】
第3に、光電スイッチ14の検出タイミングの誤差により、車輪1の撮影位置ずれが発生すると、図18の先端点Pが撮影装置13から見えなくなる場合がある。この場合、図18の寸法Cが実際より短く算出されてしまう。
【0015】
第4に、基準溝5の寸法基準側(図18のV点)の角の形状は、鋭利な直角ばかりでなく、車輪1の種類によってはわずかに面取りがなされている場合がある。面取りされた車輪1を撮影すると、図20に符号23で示すように、角が少し落ち込んだ形状となる。この場合、光像の落込みにかかわらず先端まで検出しなければ、基準側壁の位置を正しくとらえられない。
【0016】
また汚れの激しい車輪1では、基準溝5の寸法基準側(図18のV点)の角自体が直角であっても、汚れの付着によってそれだけ内側にせり出してしまう場合がある。このとき、図20に符号23で示すように、角が少し落ち込んだ形状として撮影されるが、光像の先端まで検出してしまうと、図18の寸法Cが付着物の分だけ実際より長く算出されてしまう。このように、基準溝5の角の検出は、車輪1の種類や汚れの有無に応じて、それぞれ異なる方法でなされなければならない。
【0017】
この発明は上述したような問題点を解消するためになされたもので、車輪の摩耗による影響を受けずに車輪の寸法の測定が行える車輪測定装置を提供することを目的とするものである。
本発明の他の目的は、撮影画像の画質に問題がある場合に、その影響を排除し車輪各部の寸法を正確に測定できる車輪測定装置を提供することである。
【0018】
本発明の更に他の目的は、撮影画像への外乱光の写り込みを抑え、車輪各部の寸法を正確に測定できる車輪測定装置を提供することである。
【0019】
【課題を解決するための手段】
本発明は、車軸に装着された左右一対の車輪のうち一方の車輪に対し、該車輪の前方または後方に配置され、該車輪の踏面とフランジとを含む範囲に細線状の光線を照射する光源と、上記光線により照射された上記範囲の像を撮影する撮影手段と、上記撮影手段の出力に基づいて演算を行なう演算手段と、を備え、上記演算手段において、上記撮影手段から得られた上記車輪の画像に対し、撮影時の位置関係と上記車輪の標準寸法を用いて踏面中央の探索点を定め、上記探索点を含む車軸方向(x方向)に踏面全体の幅より狭い幅で、垂直な方向(y方向)に充分長い幅の矩形領域をとり、上記矩形領域内で各y位置ごとにx方向の領域幅内の輝度値を加算した値(ヒストグラム)を求め、上記ヒストグラムの値が最大となるy位置を踏面の寸法基準位置として上記車輪の少なくとも踏面に関する寸法を算出し、上記フランジをパターンマッチング法で探索するか又は像全体でy方向の下側から順次上に横1ラインずつ輝度の大きい部分を探索して最初に見出されたところをフランジ先端としてフランジ先端のy方向の座標を求め、上記フランジ先端から所定の距離だけy方向の車輪中心側に移動した点から車輪内面側に直線を引いたフランジの像との交点を求め、摩擦しない部分である上記交点を基準点として上記矩形領域を定めることを特徴とする車輪測定装置にある。
【0020】
また、車軸に装着された左右一対の車輪のうち一方の車輪に対し、該車輪の前方または後方に配置され、該車輪の踏面とフランジとを含む範囲に細線状の光線を照射する光源と、上記光線により照射された上記範囲の像を撮影する撮影手段と、上記撮影手段の出力に基づいて演算を行なう演算手段と、を備え、上記演算手段において、上記撮影手段から得られた上記車輪の画像に対し、撮影時の位置関係と上記車輪の標準寸法とを用いて踏面中央の探索点を定め、上記探索点を含む車軸方向(x方向)に踏面全体の幅より狭い幅で、垂直な方向(y方向)に充分長い幅の矩形領域をとり、上記矩形領域内で各y位置ごとにx方向の領域幅内の輝度値を加算した値(ヒストグラム)を求め、上記ヒストグラムの値が極大となるy位置のうち、該極大値をその半値幅で除した値が最大となるy位置を踏面の寸法基準位置として上記車輪の少なくとも踏面に関する寸法を算出し、上記フランジをパターンマッチング法で探索するか又は像全体でy方向の下側から順次上に横1ラインずつ輝度の大きい部分を探索して最初に見出されたところをフランジ先端としてフランジ先端のy方向の座標を求め、上記フランジ先端から所定の距離だけy方向の車輪中心側に移動した点から車輪内面側に直線を引いたフランジの像との交点を求め、摩擦しない部分で ある上記交点を基準点として上記矩形領域を定めることを特徴とする車輪測定装置にある。
【0021】
また、車軸に装着された左右一対の車輪のうち一方の車輪に対し、該車輪の前方または後方に配置され、該車輪の踏面とフランジとを含む範囲に細線状の光を照射する光源と、上記光線により照射された上記範囲の像を撮影する撮影手段と、上記撮影手段の出力に基づいて演算を行なう演算手段と、を備え、上記演算手段において、上記撮影手段から得られた上記車輪の画像に対し、撮影時の位置関係と上記車輪の標準寸法を用いて踏面中央の探索点を定め、上記探索点を含む車軸方向(x方向)に踏面全体の幅より狭い幅で、垂直な方向(y方向)に充分長い幅の第1の矩形領域をとり、上記第1の矩形領域内で各y位置ごとにx方向の領域幅内の輝度値を加算した値(ヒストグラム)を求め、上記ヒストグラムの値が最大となるy位置を求めた後、上記y位置を含みy方向およびx方向共に狭い幅の第2の矩形領域を新たに定め、上記第2の矩形領域において所定のレベルで2値化を行なって得られた2値化画像に対して、上記第2の矩形領域内でのy方向平均位置を算出し、上記算出されたy位置を踏面の寸法基準位置として上記車輪の少なくとも踏面に関する寸法を算出し、上記フランジをパターンマッチング法で探索するか又は像全体でy方向の下側から順次上に横1ラインずつ輝度の大きい部分を探索して最初に見出されたところをフランジ先端としてフランジ先端のy方向の座標を求め、上記フランジ先端から所定の距離だけy方向の車輪中心側に移動した点から車輪内面側に直線を引いたフランジの像との交点を求め、摩擦しない部分である上記交点を基準点として上記第1の矩形領域を定めることを特徴とする車輪測定装置にある。
【0022】
また、車軸に装着された左右一対の車輪のうち一方の車輪に対し、該車輪の前方または後方に配置され、該車輪の踏面とフランジとを含む範囲に細線状の光線を照射する光源と、上記光線により照射された上記範囲の像を撮影する撮影手段と、上記撮影手段の出力に基づいて演算を行なう演算手段と、を備え、上記演算手段において、上記撮影手段から得られた上記車輪の画像に対し、上記画像の少なくともフランジのレール側面と接触するフランジ内面を含む範囲を第1の対象領域として、上記フランジ内面の少なくとも一部が検出できる第1の2値化レベルで2値化処理を行ない、得られた2値化画像において上記フランジ内面部分の検出できなかった部分を直線または曲線で補間して連続した輪郭線を得た後、上記輪郭線から所定距離内の範囲を第2の対象領域として、上記撮影手段から得られた元の踏面画像の上記第2の対象領域内に対して、上記第1の2値化レベルより低い第2の2値化レベルで2値化処理を行なって上記フランジ内面の輪郭線を再度求めることにより上記車輪の寸法を算出し、上記フランジをパターンマッチング法で探索するか又は像全体で垂直な方向(y方向)の下側から順次上に横1ラインずつ輝度の大きい部分を探索して最初に見出されたところをフランジ先端としてフランジ先端のy方向の座標を求め、上記フランジ先端から所定の距離だけy方向の車輪中心側に移動した点から車輪内面側に直線を引いたフランジの像との交点を求め、摩擦しない部分である上記交点を基準点として上記第1の対象領域を定めることを特徴とする車輪測定装置にある。
【0023】
また、車軸に装着された左右一対の車輪のうち一方の車輪に対し、該車輪の前方または後方に配置され、該車輪の踏面とフランジとを含む範囲に細線状の光線を照射する光源と、上記光線により照射された上記範囲の像を撮影する撮影手段と、上記撮影手段の出力に基づいて演算を行なう演算手段と、を備え、上記演算手段において、上記撮影手段から得られた上記車輪の画像のフランジ先端周辺部の像に対し、上記フランジをパターンマッチング法で探索するか又は像全体で垂直な方向(y方向)の下側から順次上に横1ラインずつ輝度の大きい部分を探索して最初に見出されたところをフランジ先端としてフランジ先端のy方向の座標を求めることによりフランジの位置を特定し、上記フランジ先端から所定の距離だけy方向の車輪中心側に移動した点から車輪内面側に直線を引いたフランジの像との交点を求め、摩擦しない部分である上記交点を基準点としてフランジのレール側面 と接触するフランジ内面を含む範囲を定め、上記範囲を対象領域として、所定の2値化レベルで2値化処理を行なって上記フランジ内面の輪郭線を求めることにより上記車輪の寸法を算出することを特徴とする車輪測定装置にある。
【0024】
本発明のさらに他の態様においては、上記光源と上記撮影手段の設置された位置から、上記車輪に対して上記光源と上記撮影手段のある側の少なくとも上記踏面に反射されて上記撮影手段に写る範囲の先までに対して、車輪の通過する線路の少なくとも片側の横に上記車輪の中心軸より上の高さまで遮光板を設置したことを特徴とするものである。
【0025】
本発明の更にまた他の態様においては、上記光源と上記撮影手段の設置された位置から、上記車輪に対して上記光源と上記撮影手段とのある側の少なくとも上記踏面に反射されて上記撮影手段に写る範囲の先までに対して、車輪の通過する線路上および線路横の物体を反射率の低い物質で構成するか、或いはその物体の線路側の表面を反射率の低い物質で被覆したことを特徴とするものである。
【0026】
【発明の実施の形態】
以下、添付図面により本発明の実施の形態について説明する。
【0027】
実施の形態1.
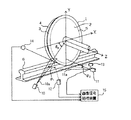
図1は、この発明の実施の形態1による車輪測定装置の各構成要素の配置を概略的に示している。図1において、車輪1、車輪内面2、フランジ3、踏面4、基準溝5、レール6、細線状レーザ光源10、11、撮影装置12、13、光電スイッチ14および画像信号処理装置15は、上述した従来例と同じものである。但し、レーザ光源11により照射されて撮影装置13により撮影される車輪内面2の位置は、レール6と車輪1の接触点の真横になっている。なお、この実施の形態1では、説明を簡単にするため、レール6が水平に設置されたものとして説明する。
【0028】
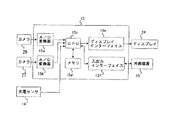
画像信号処理装置15は、図2に示すように構成されており、撮影装置12のカメラ26および撮影装置13のカメラ27からの映像信号をそれぞれ入力して、A/D変換器15aおよび15bでディジタル画像データに変換し、演算手段としてのCPU15cに読み込んでメモリ15dに格納しておき、必要に応じて取り出して、CPU15cで画像処理演算を行なう。
【0029】
画像および処理結果は、ディスプレイインターフェイス15eを介してディスプレイ24に表示される。CPU15cは入出力インターフェイス15fを介して外部装置25に接続され、データの授受を行なう。
【0030】
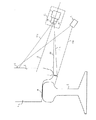
図3は、レーザ光源11、撮影装置13と車輪1との位置関係を示すために車輪1の進行方向から見た断面図である。図3に示すように、レーザ光源11は車輪1のフランジ3より下方に設置され、直線32aと32bの範囲内に細線状のレーザ光を出射し、車輪1のフランジ3から基準溝5を含む範囲を照射する。
【0031】
撮影装置13は、図1に示すように、レーザ光源11に対して上方から見た角度θ2だけ斜め横に設置されている。また、図3の断面図に示すように、撮影装置13の内部はカメラ27と受光レンズ28とから構成され、受光レンズ28の光学的中心29が、フランジ3の先端P点を通る水平面30を通る位置に配置され、光軸中心線31はフランジ先端3と基準溝5の中間に向けて設置されている。
【0032】
受光レンズ28の光学的中心29をフランジ先端3の高さに一致させることにより、フランジ先端3が過不足無く見える位置から撮影できる。
【0033】
また、通過する車輪1は常にレール6と踏面4とが接触しているため、フランジ先端3の高さ方向の位置は通過速度や撮影タイミング差に影響されることなくほぼ安定している。車輪1のフランジ高さHの違いによって、車輪1ごとにフランジ3の先端P点が少々上下するが、一般にフランジ高さHの差は数mm程度に管理されているため、影響はほとんどない。
【0034】
撮影装置13により撮影される視野範囲は、光軸中心線31を中心に左右均等な範囲31aに広がっているため、光軸中心線31をフランジ先端3と基準溝5との中間に向けて設置すると、撮影対象であるフランジ3と基準溝5ともに視野範囲に入れつつ、最大限に拡大して撮影できるので、画像処理の分解能を上げることができる。
【0035】
以上、レール6が水平に設置されたものとして説明したが、レール6が水平でない場合、上記説明の「水平面」や「高さ」の基準をレール上面に置き換えて考えればよい。
【0036】
実施の形態2.
図4は、図1において撮影装置12から画像信号処理装置15に入力された画像である。図4において、32は光源10のレーザ光10aが車輪1で乱反射した像であり、33はその像のうち踏面4部分である。34は車輪1の周囲の物体や背景などから発せられた光(以下、外乱光と称する)が車輪踏面4で主に正反射した像である。
【0037】
フランジ高さH、車輪直径Dなどの寸法を測定するためには、図18に示す踏面4中央の点Rのy方向位置を正確に求める必要があるが、図4の画像では、踏面像33が外乱光34に埋もれてしまっている。
【0038】
そこで本実施の形態2は、図2の演算手段としてのCPU15cにおいて、外乱光34に埋もれた踏面像33の位置を正確に求める方法を提示する。
【0039】
図4において、踏面像33が必ず含まれるようなy方向に長い矩形領域を探索領域35として設定する。この探索領域35のx方向(車軸方向)の位置は、別途、車軸方向測定手段、例えば図1におけるレーザ光源11と撮影装置13により決定された結果を用いて決める。
【0040】
この探索領域35内で、各y位置においてx方向に画像の輝度値を加算した値(ヒストグラム)を計算し、yの関数として表わすと、図4の右端のような分布が得られる。図4において、36は外乱光34に対応し、37は踏面像33に対応している。そこで、輝度ヒストグラムが最大となる37をとれば、踏面像のy位置を確定することができる。
【0041】
実施の形態3.
図5は、設置条件等により外乱光の大きさと位置が異なる場合を示したもので、踏面像33の近傍にかなり強く現われたものを示す。前記実施の形態2と同様、この領域内で輝度ヒストグラムとると、図5に符号38で示すような分布となり、外乱光34が明るいために、ヒストグラムの最大値は、踏面像33のところではなく外乱光34の方に現われる。本実施の形態3は、CPU15cにおいて次の処理を行うことにより、このような現象を改善するものである。
【0042】
ヒストグラムは、外乱光34と踏面像33に対応する箇所にそれぞれ極大を示すので、それぞれの極大値wと半値幅hを求め、それらの比h/wの値を算出する。レーザ光による踏面像33は細線状のためh/wの値が大きく、外乱光34は広がっているためh/wの値は小さい。そこで現われた極大のうち、h/wの最大のものをとれば踏面像33のy位置を確定することができる。勿論、この方法は図4の実施の形態2の場合にも適用可能である。
【0043】
実施の形態4.
図6は、異なるパターンの外乱を示したもので、踏面像33にほぼ重なっているが、探索領域35のx方向中央以外の部分では重ならずに近接してかなり強い外乱光39がある場合である。
【0044】
このヒストグラムは、図6の右端に示すような分布となり、明るい外乱光39が強くしかも近接しているために、極大を1つだけ生じその中心は明るい外乱光39の中心41と踏面像33の中心43の間となってしまい、そのまま踏面像の位置とすると誤差が大きい。
【0045】
そこで、本実施の形態4では、CPU15cにおいて次の処理を行う。すなわち、得られた極大位置を中心として、x方向の幅を半分程度に狭めy方向幅をこの極大位置を含む程度に絞った、図6の符号42で示すような矩形領域からなる第2の探索領域を定め、この探索領域42内の画像に対して含まれる外乱光39と踏面像33との中間レベルで2値化する。その結果、第2の探索領域42内には強い外乱光が含まれないため、2値化された踏面像33だけが現われる。この踏面像33のy方向の位置を全画素の平均等の方法により計算すれば、踏面像33のy位置を確定することができる。この方法は、図4および図5に示した実施の形態2および3の場合にも適用可能である。
【0046】
実施の形態5.
上記実施の形態2〜4では、探索領域35を設定するとき、x方向(車軸方向)の位置を別途車軸方向測定手段により求めるものとしたが、フランジ高さH等の踏面寸法だけ測定する目的の装置では、踏面撮影用のレーザ光源10と撮影装置12による撮影画像だけから寸法算出しなければならない。
【0047】
そこで、本実施の形態5は、1つの画像から探索領域35を決定する方法を提供するもので、CPU15cにおいて、次の処理を行う。
【0048】
図7は、上記実施の形態2〜4と同様、撮影装置12から画像信号処理装置15に入力された画像を表している。まず、この画像上でフランジ先端3のy座標を求める。具体的には、踏面像33のうち矩形状の枠44で囲まれた形状すなわちフランジ部分をパターンマッチング法で探索した後、先端3のy座標を求めるか、または画像全体でy軸の下側から順次上に横1ラインずつ輝度の大きい部分を探索して、最初に見出されたところを先端3とするなどの方法による。
【0049】
次に、先端3から所定の距離aだけ車輪中心方向(y)に移動した点から車輪内面側に直線を引き、フランジ像32との交点を求める。この交点のx座標と先に求めたフランジ先端3のy座標を持つ点45をこの車輪1の基準点とし、ここから所定のxy寸法だけ離れた点を基準として探索領域35を定める。なお、交点45は通常は摩耗しない部分から決定しているので、摩耗によって変動することがない。
【0050】
実施の形態6.
本実施の形態6は、図1において撮影装置12から画像信号処理装置15に入力された画像において、外乱光がある場合にフランジ厚さFを測定するためのフランジ内面の輪郭線を求める方法を提供するもので、このため、CPU15cにおいて次に述べるような処理を行う。
【0051】
図8は、上記実施の形態2〜5と同様、撮影装置12から画像信号処理装置15に入力された画像を表している。図8において、50は外乱光、領域47はフランジ内面を含む矩形状の探索領域である。49はレーザ光の踏面像33のうち、フランジ内面の反射率が低いために受光量が小さく暗くなっている部分である。
【0052】
探索領域47は、フランジ内面部以外の外乱光をできるだけ含まないようにするため、正確に決定する必要がある。このため、上記実施の形態5と同様に、明るいフランジ部分から基準点45を求め、ここから所定のxy寸法だけ離れた点を基準として探索領域47を定める。
【0053】
この探索領域47内にある外乱光50の輝度は、暗い踏面像49より大きいため、領域全体で一律に2値化処理すると両者を区別することが困難である。そこで、まず外乱光50の輝度より高い2値化レベルで探索領域47内を2値化し、図9左上のように、外乱光のない2値化画像を得る。このとき、踏面像の暗い部分は図9に符号51で示すように消えてしまう。
【0054】
次に、残った像から消えた部分を直線で補間することにより、図9右上の輪郭線52を得る。補間された部分は真のフランジ形状に一致していないので、このまま寸法測定に使用すると誤差が生じる。そこで、2値化された輪郭線52から両側に所定の距離だけ離れた範囲53をとり、この領域を原画像に当てはめる(図9右下)。
【0055】
この領域には外乱光が含まれないので、暗い部分49より低い2値化レベルで2値化を行なうと、図9右下のようにフランジ内面の輪郭全体が連続した曲線として抽出される。
【0056】
参考例1.
本参考例1は、車輪内面の基準溝の角の形状に差がある場合に、その影響を受けずに位置を検出する方法を提供するもので、CPU15cにおいて、次に述べるような処理を行う。
【0057】
図10は、図1において撮影装置13から画像信号処理装置15に入力された画像のうち、車輪内面2の基準溝(図18の5)付近を拡大したものであり、54は車輪内面2の平坦部分の像、5は基準溝部分である。
【0058】
基準溝5の角55の部分の形状は、車輪の種類あるいは車輪個々の個体差によって角が直角のものと面取りされたものがある。角が直角のものは車輪内面から基準溝の直前まで直線となった画像として撮影されるが、角が面取りされた基準溝の場合には、図10に示すように、わずかに落込んだ形状の画像として撮影される。
【0059】
車輪直径Dを算出するのに必要な図18のC寸法を測定するためには、基準溝5の基準側端(点V)の位置を正確に決めることが重要であり、図10の撮影画像において角55の形状にかかわらず、角55の先端(P1で示す点)を検出する必要がある。
【0060】
そこで、本参考例1では、以下の方法により常に角55の先端を検出できるようにする。
【0061】
図10において、車輪内面の像54の上にy座標の間隔がΔyである3点(P0、P1、P2)をとり、P0とP1間のx座標の差x1、P1とP2間のx座標の差x2をそれぞれ求める。y座標の間隔Δyの大きさは、面取りのy方向の大きさ程度が適当である。
【0062】
このような3点(P0、P1、P2)を、まず基準溝5より車輪中心側(図10では上側)例えば56aに示す位置にとり、3点のy座標を1画素ずつ車輪外周方向(図10では下方向)へ変えながら移動させたとき、定数a、bに対して最初にx1<aかつx2>bとなったときの点P1の位置を基準溝5の基準側端と判断する。この位置を56bに示す。
【0063】
aは画像上での基準溝5の深さ(x方向)より少し小さい値、bは画像上での面取り部分のx方向寸法より少し大きい値とするとよい。このようにして検出されたP1の位置は、角55の落込み有無にかかわらず必ず基準側端になる。
【0064】
参考例2.
本参考例2は、車輪の基準溝の角が直角であって溝に異物が付着した場合に、その影響を受けずに位置を検出する方法を提供するもので、このためCPU15cにおいて次の処理を行う。
【0065】
基準溝の角自体が直角でも走行中に汚れやゴミなどの異物が付着すると、撮影画像は図11のようになる。像の形状は図10と類似しているが、この場合は点P2で示す部分が車輪自体の角にあたり、落込んだように見える57の部分は付着した異物による反射による像である。
【0066】
そこで、本参考例2では、異物の付着の有無によらず、基準溝5の基準側端(P2で示す点)を検出する。
【0067】
図11において、まず前記参考例1による方法で基準溝5の端点P1の位置を検出し、次に点P1を端として車輪外周側にy座標の間隔がΔyである2点(P1、P2)をとり、P1とP2間のx座標の差を求める。y座標の間隔Δyの大きさは、前記参考例1の場合と同様、面取りのy方向の大きさ程度が適当である。
【0068】
図示例の場合、付着物による落込みのために点P1、P2間のx座標の差は0ではない。このような2組の点を車輪外周方向(図11では下方向)へ1画素ずつ移動させ、2点間のx座標の差が最初に0となったときの後ろ側の点を基準溝5の基準側端と判断する。図11では点P2の位置に相当する。
【0069】
このようにして検出された基準側端の位置は、付着物による落込みの有無にかかわらず必ず基準側端になる。この方法は基準溝5の角に面取りがなく、付着物が多い場合に有効である。
【0070】
参考例3.
図12は、図1において撮影装置13から画像信号処理装置15に入力された画像のうち、車輪内面からフランジ先端に至る部分を拡大したものである。図12において、58は基準溝5(図1参照)から続く車輪内面の平坦部分、60はフランジ先端3(図1参照)付近であり、先端付近の像は輝度が小さくなっており見えにくい。
【0071】
そこで、本参考例3は、入力された画像のフランジ先端の見えにくい部分を使用しないで、フランジ先端までの距離を正確に求める方法を提供するもので、CPU15cにおいて次の処理を行う。
【0072】
すなわち、入力画像において、車輪内面の平坦部分58に平行で所定の距離x0だけ離れた直線59をフランジ先端の曲っている側にとり、この直線とフランジ先端像との交点P3を求め、その点より先端方向に所定の距離y0だけ先の位置をフランジ先端と決定する。距離x0の値は、交点P3が全ての車輪画像に対して明瞭に撮影される範囲になるように定め、加算する値y0は実際の車輪による測定値と比較して定める。
【0073】
本参考例3では、フランジ先端の見えにくい部分を使用しないため、先端の撮影状態の影響を受けることがない。
【0074】
参考例4.
図13は、図12と同様に、先端が見えにくい場合の画像である。図13において、61は輝度が高く常に安定している部分、62は輝度が低くしかも車輪ごとに差のある部分である。61、62とも連続して先端の曲線部を構成しているため、曲線部分61の形状から外挿して曲線62を決定することができる。
【0075】
本参考例4では、このための実用的な1方法として、CPU15cにおいて次の処理を行う。すなわち、曲線61を2次曲線で近似してパラメータを定め、曲線62側へ延長する。このようにして得られた延長曲線の先端y座標(63の位置)を求めることは容易である。
【0076】
本参考例4も、フランジ先端の見えにくい部分を使用しないため、先端の撮影状態の影響を受けることがない。
【0077】
実施の形態7.
本実施の形態7は、車輪踏面を撮影した映像に外乱光が写るのを低減する方法を提供する。図14は、図1または図2における車輪踏面の撮影系を線路側面から見たものである。図14において、撮影装置12はレーザ光源10により照射され車輪踏面4で乱反射された光を受光すると同時に、前方路面からの光が車輪踏面4で正反射されたものも受光する。後者のうち画像上で前者の像と重複または近付いて写るものは、レーザ光源10の照射光10aを中心にして、撮影装置12の受光軸と対称な角度の方向になる。従って、この角度の方向の路面の反射を抑えることによって、撮影画像への混入を低減することができる。
【0078】
図14に示す直線64は、路面上からの光が車輪踏面4で正反射されて撮影装置12へ入る限界に少し余裕をみたもので、撮影時の車輪中心からの距離はLである。
【0079】
本実施の形態7では、図15に示すように、この距離Lの範囲への光の照射を防ぐため、線路両側横に平行に遮光板65を設置する。遮光板65の高さは、測定する車両の形状と太陽光の照射する条件等を考慮し、車両の通過時に直射日光や間接光の明るい光が路面に照射しないような高さにする。なお、図15において、66は光源10および撮影装置12等の収納されたブロックを示している。
【0080】
実施の形態8.
路面など前方からの反射光を低減する方法として、反射光を発生する路面上の物体の表面反射率を低く抑えることが有効である。
【0081】
図16に符号67で示す範囲は、車輪1の踏面で正反射されて撮影装置に入る範囲を示す。そこで、本実施の形態8では、この範囲内の全ての物体の表面反射率を低くする。すなわち、車輪踏面に反射してカメラに写る範囲の線路および周辺の物体(建造物)を反射率の低いもので構成するか、或いはその物体の線路側の表面を反射率の低い物質で被覆をする。具体的には、バラストやコンクリート自体に黒色のものを使用したり、あるいは黒色の塗料で塗装する等の方法でもよい。
【0082】
これに加え、図15に示すように、線路横に遮光板65を設置しその内面を黒色塗装する方法を併用すれば、効果が更に大きくなる。
【0083】
【発明の効果】
以上のように、この発明によれば、車輪内面側のレーザ光を照射され撮影される位置を車輪とレールの接点の真横とし、カメラの受光レンズの光学的中心をフランジ先端の水平高さに設置し、光軸中心線をフランジ先端と内面基準溝の間に向けて設置することにより、車輪が通過して撮影するときの速度の違いなどの影響を受けることなく、常にフランジ先端が過不足なく見えるように撮影されるので、フランジ先端までの寸法測定誤差が低減され、またフランジ先端と内面基準溝を充分な拡大率でカメラの視野範囲に収めることができるので、測定分解能が高くなる効果がある。
【0084】
また、車輪踏面を撮影した画像上で踏面中央概略位置を含む矩形領域をとり、車軸に平行な方向の輝度の加算値を求め、それと直角方向にこの加算値の分布を調べて最大となる位置を踏面の寸法基準位置とすることにより、照射光以外に広く分布した外乱光による影響を排除し、測定に必要な踏面中央位置を決定できる効果がある。
【0085】
また、車輪踏面を撮影した画像上で踏面中央概略位置を含む矩形領域をとり、車軸に平行な方向の輝度の加算値を求め、それと直角方向にこの加算値の分布が極大となる位置のうち、極大値をその半値幅で割った値が最大となる位置を踏面の寸法基準位置とすることにより、照射光以外の横付近に比較的強く入る外乱光による影響を排除し、測定に必要な踏面中央位置を決定できる効果がある。
【0086】
また、車輪踏面を撮影した画像上で踏面中央概略位置を含む矩形領域をとり、車軸に平行な方向の輝度の加算値を求め、それと直角方向にこの加算値の分布を調べて最大となる位置を求め、その位置を含むさらに狭い矩形領域をとって、2値化を行なった後、領域内での車軸平行方向の平均位置を求めて踏面の寸法基準位置とすることにより、求める照射光の近傍に局部的に強く現われた外乱光による影響を排除し、測定に必要な踏面中央位置を決定できる効果がある。
【0087】
また、車輪踏面を撮影した画像上で、フランジ先端と内面側にかけての像から位置を定め、この位置と車輪の標準寸法とから踏面中央の探索領域を決定することにより、踏面撮影用のレーザ光源と撮影装置による撮影画像だけから踏面関係の寸法を算出できる効果がある。
【0088】
また、車輪踏面とフランジを撮影した画像上で、まず大きいレベルで2値化してフランジ内面の輪郭線を求め、得られた輪郭線から所定の距離内を対象範囲として、小さいレベルで2値化を行なってフランジ内面の輪郭線を決定することにより、フランジ内面の照射光の像が暗い場合でも、周辺の外乱光の影響を受けずにフランジ内面の形状を正確に検出できる効果がある。
【0089】
また、車輪踏面とフランジを撮影した画像上で、フランジ先端と内面側にかけての像からフランジの位置を定め、この位置と車輪の標準寸法からフランジ内面の輪郭線を求める領域を決定することにより、フランジ内面の像が暗い場合でも、その周辺の外乱光の影響を受けずに探索領域を決定できる効果がある。
【0090】
また、車輪内面を撮影した画像上で、内面に平行な方向に少し離れた3点をとり、中央の点と前後の点との内面に直角方向の位置差を調べ、一方の差が0または充分小さく、他方の差が所定値以上となるときの中央の点の位置を求めることにより、基準溝の基準となる角の面取りの有無によらず、基準溝の寸法基準端を正しく検出できる効果がある。
【0091】
また、車輪内面を撮影した画像上で、請求項8の方法により特定された位置を起点として、差の小さかった点の方向に順次移動して、2つの点のx座標の差が0となるところを求めることにより、基準溝の内側にある付着物の反射による直線でない部分を除き、基準溝の寸法基準端を正しく検出できる効果がある。
【0092】
また、車輪内面およびフランジ先端部を撮影した画像上で、光の像の内面に相当する部分に平行で所定の距離だけ離れた直線とフランジ先端部の像との交点を求め、そこから一定の距離だけ先をフランジ先端とすることにより、フランジ先端付近の像の写り具合の違いの影響を受けずに先端位置を決めることができ、フランジ先端までの寸法を正確に測定できる効果がある。
【0093】
また、車輪内面およびフランジ先端部を撮影した画像上で、フランジ先端部のやや手前の光の像の曲線をその形状に従って延長してフランジ先端の位置を推定することにより、フランジ先端付近の像の写り具合の違いの影響を受けずに先端位置を決めることができ、フランジ先端までの寸法を正確に測定できる効果がある。
【0094】
また、車輪踏面に反射してカメラに写る範囲の線路の横に遮光板を設置することにより、路面に明るい光が照射されるのを防ぎ、明るい路面が車輪踏面に反射して撮影画像に混入するのを防止できる効果がある。
【0095】
また、車輪踏面に反射してカメラに写る範囲の線路および周辺の物体を反射率の低いもので構成するか、或いはその物体の線路側の表面を反射率の低い物質で被覆をすることにより、線路および周辺からの反射光を減少させ、車輪踏面の撮影画像に混入するのを防止できる効果がある。
【図面の簡単な説明】
【図1】この発明の全ての実施の形態に共通な車輪測定装置の撮影部と画像信号処理部の配置を示す斜視図である。
【図2】本発明の処理装置の構成と周辺装置との関係を示すブロック図である。
【図3】この発明の実施の形態1の概略構成を示す図である。
【図4】この発明の実施の形態2による画像処理を示す説明図である。
【図5】この発明の実施の形態3による画像処理を示す説明図である。
【図6】この発明の実施の形態4による画像処理を示す説明図である。
【図7】この発明の実施の形態5による画像処理を示す説明図である。
【図8】この発明の実施の形態6による画像処理を示す説明図である。
【図9】この発明の実施の形態6による画像処理の詳細を示す説明図である。
【図10】この発明の参考例1による画像処理を示す説明図である。
【図11】この発明の参考例2による画像処理を示す説明図である。
【図12】この発明の参考例3による画像処理を示す説明図である。
【図13】この発明の参考例4による画像処理を示す説明図である。
【図14】この発明の実施の形態7において車輪踏面の撮影系を線路側面から見た図である。
【図15】この発明の実施の形態7の要部の構成を表す図である。
【図16】この発明の実施の形態8の要部の構成を表す図である。
【図17】従来の車輪測定装置の概略構成を表す斜視図である。
【図18】車輪断面の形状と測定部を示す図である。
【図19】車輪踏面の撮影画像における外乱光を示す図である。
【図20】車輪内面の撮影画像における基準溝とフランジ先端の性質を示す図である。
【符号の説明】
1 車輪、2 車輪内面、3 フランジ、4 車輪踏面、5 基準溝、6 レール、10、11 レーザ光源、10a、11a レーザ光線、12、13 撮影装置、14 光電スイッチ、15 画像信号処理装置、15a、15b A/D変換器、15c CPU、15d メモリ、15e ディスプレイインターフェイス、15f 入出力インターフェイス、18 外乱光、24 ディスプレイ、25 外部装置、26、27 カメラ、28 受光レンズ、29 光学的中心、30 水平面、31 光軸中心線、32 フランジ像、32a 直線、33 踏面像、34 外乱光、35 探索領域、39 外乱光、41 外乱光中心、42 探索領域、43 踏面像中心、44 枠、45 基準点、47 探索領域、49 踏面像、50 外乱光、52 輪郭線、54 車輪内面の像、55 角、58 車輪内面の平坦部分、59 直線、61 曲線、62 曲線、64 直線、65 遮光板、D 車輪径、F フランジ厚さ、H フランジ高さ、L 距離、P 先端、S フランジ先端寸法、Δy 間隔、α 踏面勾配、θ2 角度、φ フランジ角度。
Claims (7)
- 車軸に装着された左右一対の車輪のうち一方の車輪に対し、該車輪の前方または後方に配置され、該車輪の踏面とフランジとを含む範囲に細線状の光線を照射する光源と、
上記光線により照射された上記範囲の像を撮影する撮影手段と、
上記撮影手段の出力に基づいて演算を行なう演算手段と、
を備え、
上記演算手段において、上記撮影手段から得られた上記車輪の画像に対し、撮影時の位置関係と上記車輪の標準寸法を用いて踏面中央の探索点を定め、
上記探索点を含む車軸方向(x方向)に踏面全体の幅より狭い幅で、垂直な方向(y方向)に充分長い幅の矩形領域をとり、
上記矩形領域内で各y位置ごとにx方向の領域幅内の輝度値を加算した値(ヒストグラム)を求め、
上記ヒストグラムの値が最大となるy位置を踏面の寸法基準位置として上記車輪の少なくとも踏面に関する寸法を算出し、
上記フランジをパターンマッチング法で探索するか又は像全体でy方向の下側から順次上に横1ラインずつ輝度の大きい部分を探索して最初に見出されたところをフランジ先端としてフランジ先端のy方向の座標を求め、上記フランジ先端から所定の距離だけy方向の車輪中心側に移動した点から車輪内面側に直線を引いたフランジの像との交点を求め、摩擦しない部分である上記交点を基準点として上記矩形領域を定めることを特徴とする車輪測定装置。 - 車軸に装着された左右一対の車輪のうち一方の車輪に対し、該車輪の前方または後方に配置され、該車輪の踏面とフランジとを含む範囲に細線状の光線を照射する光源と、
上記光線により照射された上記範囲の像を撮影する撮影手段と、
上記撮影手段の出力に基づいて演算を行なう演算手段と、
を備え、
上記演算手段において、上記撮影手段から得られた上記車輪の画像に対し、撮影時の位置関係と上記車輪の標準寸法とを用いて踏面中央の探索点を定め、
上記探索点を含む車軸方向(x方向)に踏面全体の幅より狭い幅で、垂直な方向(y方向)に充分長い幅の矩形領域をとり、
上記矩形領域内で各y位置ごとにx方向の領域幅内の輝度値を加算した値(ヒストグラム)を求め、
上記ヒストグラムの値が極大となるy位置のうち、該極大値をその半値幅で除した値が最大となるy位置を踏面の寸法基準位置として上記車輪の少なくとも踏面に関する寸法を算出し、
上記フランジをパターンマッチング法で探索するか又は像全体でy方向の下側から順次上に横1ラインずつ輝度の大きい部分を探索して最初に見出されたところをフランジ先端としてフランジ先端のy方向の座標を求め、上記フランジ先端から所定の距離だけy方向の車輪中心側に移動した点から車輪内面側に直線を引いたフランジの像との交点を求め、摩擦しない部分である上記交点を基準点として上記矩形領域を定めることを特徴とする車輪測定装置。 - 車軸に装着された左右一対の車輪のうち一方の車輪に対し、該車輪の前方または後方に配置され、該車輪の踏面とフランジとを含む範囲に細線状の光を照射する光源と、
上記光線により照射された上記範囲の像を撮影する撮影手段と、
上記撮影手段の出力に基づいて演算を行なう演算手段と、
を備え、
上記演算手段において、上記撮影手段から得られた上記車輪の画像に対し、撮影時の位置関係と上記車輪の標準寸法を用いて踏面中央の探索点を定め、
上記探索点を含む車軸方向(x方向)に踏面全体の幅より狭い幅で、垂直な方向(y方向)に充分長い幅の第1の矩形領域をとり、
上記第1の矩形領域内で各y位置ごとにx方向の領域幅内の輝度値を加算した値(ヒストグラム)を求め、
上記ヒストグラムの値が最大となるy位置を求めた後、
上記y位置を含みy方向およびx方向共に狭い幅の第2の矩形領域を新たに定め、
上記第2の矩形領域において所定のレベルで2値化を行なって得られた2値化画像に対して、上記第2の矩形領域内でのy方向平均位置を算出し、
上記算出されたy位置を踏面の寸法基準位置として上記車輪の少なくとも踏面に関する寸法を算出し、
上記フランジをパターンマッチング法で探索するか又は像全体でy方向の下側から順次上に横1ラインずつ輝度の大きい部分を探索して最初に見出されたところをフランジ先端としてフランジ先端のy方向の座標を求め、上記フランジ先端から所定の距離だけy方向の車輪中心側に移動した点から車輪内面側に直線を引いたフランジの像との交点を求め、摩擦しない部分である上記交点を基準点として上記第1の矩形領域を定めることを特徴とする車輪測定装置。 - 車軸に装着された左右一対の車輪のうち一方の車輪に対し、該車輪の前方または後方に配置され、該車輪の踏面とフランジとを含む範囲に細線状の光線を照射する光源と、
上記光線により照射された上記範囲の像を撮影する撮影手段と、
上記撮影手段の出力に基づいて演算を行なう演算手段と、
を備え、
上記演算手段において、上記撮影手段から得られた上記車輪の画像に対し、上記画像の少なくともフランジのレール側面と接触するフランジ内面を含む範囲を第1の対象領域として、上記フランジ内面の少なくとも一部が検出できる第1の2値化レベルで2値化処理を行ない、
得られた2値化画像において上記フランジ内面部分の検出できなかった部分を直線または曲線で補間して連続した輪郭線を得た後、
上記輪郭線から所定距離内の範囲を第2の対象領域として、上記撮影手段から得られた元の踏面画像の上記第2の対象領域内に対して、上記第1の2値化レベルより低い第2の2値化レベルで2値化処理を行なって上記フランジ内面の輪郭線を再度求めることにより上記車輪の寸法を算出し、
上記フランジをパターンマッチング法で探索するか又は像全体で垂直な方向(y方向)の下側から順次上に横1ラインずつ輝度の大きい部分を探索して最初に見出されたところをフランジ先端としてフランジ先端のy方向の座標を求め、上記フランジ先端から所定の距離だけy方向の車輪中心側に移動した点から車輪内面側に直線を引いたフランジの像との交点を求め、摩擦しない部分である上記交点を基準点として上記第1の対象領域を定めることを特徴とする車輪測定装置。 - 車軸に装着された左右一対の車輪のうち一方の車輪に対し、該車輪の前方または後方に配置され、該車輪の踏面とフランジとを含む範囲に細線状の光線を照射する光源と、
上記光線により照射された上記範囲の像を撮影する撮影手段と、
上記撮影手段の出力に基づいて演算を行なう演算手段と、
を備え、
上記演算手段において、上記撮影手段から得られた上記車輪の画像のフランジ先端周辺部の像に対し、上記フランジをパターンマッチング法で探索するか又は像全体で垂直な方向(y方向)の下側から順次上に横1ラインずつ輝度の大きい部分を探索して最初に見出されたところをフランジ先端としてフランジ先端のy方向の座標を求めることによりフランジの位置を特定し、
上記フランジ先端から所定の距離だけy方向の車輪中心側に移動した点から車輪内面側に直線を引いたフランジの像との交点を求め、摩擦しない部分である上記交点を基準点としてフランジのレール側面と接触するフランジ内面を含む範囲を定め、
上記範囲を対象領域として、所定の2値化レベルで2値化処理を行なって上記フランジ内面の輪郭線を求めることにより上記車輪の寸法を算出することを特徴とする車輪測定装置。 - 上記光源と上記撮影手段の設置された位置から、上記車輪に対して上記光源と上記撮影手段のある側の少なくとも上記踏面に反射されて上記撮影手段に写る範囲の先までに対して、車輪の通過する線路の少なくとも片側の横に上記車輪の中心軸より上の高さまで遮光板を設置したことを特徴とする請求項1乃至5のいずれか1項に記載の車輪測定装置。
- 上記光源と上記撮影手段の設置された位置から、上記車輪に対して上記光源と上記撮影手段とのある側の少なくとも上記踏面に反射されて上記撮影手段に写る範囲の先までに対して、車輪の通過する線路上および線路横の物体を反射率の低い物質で構成するか、或いはその物体の線路側の表面を反射率の低い物質で被覆したことを特徴とする請求項1乃至6のいずれか1項に記載の車輪測定装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2000034945A JP3615980B2 (ja) | 2000-02-14 | 2000-02-14 | 車輪測定装置 |
| KR10-2000-0045910A KR100382577B1 (ko) | 2000-02-14 | 2000-08-08 | 차륜 측정장치 |
| FR0010479A FR2805038B1 (fr) | 2000-02-14 | 2000-08-09 | Dispositif de mesure des dimensions de roues telles que celles de vehicules de chemin de fer ou de materiels roulants |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2000034945A JP3615980B2 (ja) | 2000-02-14 | 2000-02-14 | 車輪測定装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2001227924A JP2001227924A (ja) | 2001-08-24 |
| JP3615980B2 true JP3615980B2 (ja) | 2005-02-02 |
Family
ID=18559206
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2000034945A Expired - Lifetime JP3615980B2 (ja) | 2000-02-14 | 2000-02-14 | 車輪測定装置 |
Country Status (3)
| Country | Link |
|---|---|
| JP (1) | JP3615980B2 (ja) |
| KR (1) | KR100382577B1 (ja) |
| FR (1) | FR2805038B1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2013052100A1 (en) * | 2011-10-03 | 2013-04-11 | International Electronic Machines Corporation | Brake component monitoring |
Families Citing this family (31)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AT504733B1 (de) * | 2004-04-20 | 2009-07-15 | Hottinger Messtechnik Baldwin | Vorrichtung zum ermitteln von flachstellen und/oder bestimmen von gleichmässigen abnützungen von laufflächen und/oder von radien von laufflächen von schienenrädern und verfahren zum ermitteln und bestimmen derselben |
| US20080204765A1 (en) * | 2005-09-19 | 2008-08-28 | Manfred Hoffmann | Method for Contactless Dynamic Detection of the Profile of a Solid Body |
| CN2849715Y (zh) * | 2005-11-29 | 2006-12-20 | 上海铁路局科学技术研究所 | 一种非接触式ccd高速动态检测装置 |
| US7714886B2 (en) | 2006-03-07 | 2010-05-11 | Lynxrail Corporation | Systems and methods for obtaining improved accuracy measurements of moving rolling stock components |
| JP4913498B2 (ja) * | 2006-08-08 | 2012-04-11 | 日立交通テクノロジー株式会社 | 鉄道車両車輪計測装置 |
| CN100449259C (zh) * | 2006-12-18 | 2009-01-07 | 杭州电子科技大学 | 车辆轮对直径在线检测方法及装置 |
| US8289526B2 (en) * | 2007-07-17 | 2012-10-16 | Lynxrail Corporation | System and method for analyzing rolling stock wheels |
| JP5471889B2 (ja) * | 2010-06-28 | 2014-04-16 | 日産自動車株式会社 | 表面形状計測方法およびその装置 |
| KR101056465B1 (ko) * | 2010-09-10 | 2011-08-12 | 주식회사 에코마이스터 | 차륜이상검지장치 및 이를 이용한 차륜 검사 시스템 |
| CN102060037A (zh) * | 2010-12-07 | 2011-05-18 | 安徽科富光电装备有限公司 | 机车轮对全周外形尺寸在线动态检测装置 |
| KR101108548B1 (ko) * | 2011-07-12 | 2012-01-30 | 김진철 | 이어폰 케이블 권취기구 |
| DE102012207427A1 (de) * | 2012-05-04 | 2013-11-07 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Verfahren zur optisch-abtastenden Prüfung einer Radlauffläche eines Rades eines Zuges im Fahrbetrieb, optische Prüfvorrichtung, Prüfsystem und Prüfsystemanordnung sowie Steuermodul |
| CN102788803B (zh) * | 2012-07-09 | 2014-08-20 | 南京航空航天大学 | 列车轮对踏面和轮缘在线高速检测系统及其检测方法 |
| CN102840988A (zh) * | 2012-10-12 | 2012-12-26 | 株洲南车时代电气股份有限公司 | 机车车轮与滚动试验台轨道轮的定位方法 |
| CN103591902B (zh) * | 2013-11-11 | 2016-07-27 | 南京理工大学 | 一种基于激光传感器的城轨车辆车轮直径检测装置及方法 |
| CN103591899B (zh) * | 2013-11-11 | 2016-02-24 | 南京理工大学 | 传感器圆弧法线安装的城轨车辆车轮直径检测装置及方法 |
| CN103587548B (zh) * | 2013-11-11 | 2016-04-20 | 南京理工大学 | 传感器直接测量的城轨车辆车轮不圆度检测方法 |
| CN103661485A (zh) * | 2013-12-23 | 2014-03-26 | 成都铁安科技有限责任公司 | 一种测量机车车辆车轮直径的激光检测装置 |
| CN104192168B (zh) * | 2014-08-22 | 2015-05-13 | 石家庄铁道大学 | 基于图像处理的轮轨位移检测方法 |
| WO2016030009A1 (de) * | 2014-08-29 | 2016-03-03 | Schenck Process Gmbh | Vorrichtung und verfahren zur ermittlung von geometrie-kennwerten eines radprofils an einem rollenden rad eines schienenfahrzeugs |
| CN104554344B (zh) * | 2014-12-19 | 2017-08-25 | 苏州华兴致远电子科技有限公司 | 踏面缺陷信息检测系统及方法 |
| CN104848795A (zh) * | 2015-03-16 | 2015-08-19 | 东莞市诺丽电子科技有限公司 | 在线车轮直径测量方法 |
| CN106080662B (zh) * | 2016-05-27 | 2018-10-02 | 南京理工大学 | 一种非接触式轮对尺寸在线检测方法及系统 |
| CN106767415A (zh) * | 2017-01-03 | 2017-05-31 | 北京铁道工程机电技术研究所有限公司 | 车轮外形几何尺寸检测平台 |
| CN107415985A (zh) * | 2017-03-24 | 2017-12-01 | 东莞市诺丽电子科技有限公司 | 列车车轮直径检测方法 |
| CN107202543A (zh) * | 2017-05-27 | 2017-09-26 | 广州地铁集团有限公司 | 城轨列车车轮直径的检测方法 |
| CN112740010B (zh) | 2018-07-31 | 2023-10-27 | 日本制铁株式会社 | 检查系统、检查方法以及存储介质 |
| CN109084704A (zh) * | 2018-10-19 | 2018-12-25 | 深圳市道通科技股份有限公司 | 一种轮定位仪 |
| JP7557786B2 (ja) | 2021-06-16 | 2024-09-30 | 公益財団法人鉄道総合技術研究所 | レール変位測定装置及びレール変位測定方法 |
| CN115305753B (zh) * | 2022-10-12 | 2023-02-07 | 中国铁建高新装备股份有限公司 | 一种钢轨廓形快速预测方法、系统 |
| CN117990397B (zh) * | 2024-01-09 | 2024-06-28 | 江苏安狮智能技术有限公司 | 一种列车车轮检测辅助装置 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0228500B2 (de) * | 1985-08-12 | 1994-12-28 | Wilhelm Hegenscheidt Gesellschaft mbH | Verfahren und Einrichtung zur berührungslosen Vermessung des Radprofils der Räder von Eisenbahnradsätzen |
| ES2106213T3 (es) * | 1993-03-25 | 1997-11-01 | Hegenscheidt Mfd Gmbh | Procedimiento para la determinacion del diametro de una linea periferica en ruedas de pares de ruedas y dispositivo para la ejecucion del procedimiento. |
| FR2730056B1 (fr) * | 1995-01-27 | 1997-04-11 | Muller Bem | Dispositif de detection et de mesure d'emplacement sur corps tournant, et machine d'equilibrage de corps tournant |
| US5636026A (en) * | 1995-03-16 | 1997-06-03 | International Electronic Machines Corporation | Method and system for contactless measurement of railroad wheel characteristics |
-
2000
- 2000-02-14 JP JP2000034945A patent/JP3615980B2/ja not_active Expired - Lifetime
- 2000-08-08 KR KR10-2000-0045910A patent/KR100382577B1/ko not_active IP Right Cessation
- 2000-08-09 FR FR0010479A patent/FR2805038B1/fr not_active Expired - Fee Related
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2013052100A1 (en) * | 2011-10-03 | 2013-04-11 | International Electronic Machines Corporation | Brake component monitoring |
| US9945652B2 (en) | 2011-10-03 | 2018-04-17 | International Electronic Machines Corporation | Brake component monitoring |
| US12066287B2 (en) | 2011-10-03 | 2024-08-20 | International Electronic Machines Corp. | Brake component monitoring |
Also Published As
| Publication number | Publication date |
|---|---|
| KR100382577B1 (ko) | 2003-05-01 |
| FR2805038A1 (fr) | 2001-08-17 |
| JP2001227924A (ja) | 2001-08-24 |
| KR20010081930A (ko) | 2001-08-29 |
| FR2805038B1 (fr) | 2004-10-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3615980B2 (ja) | 車輪測定装置 | |
| US8107683B2 (en) | Method and system for in-vehicle image processing | |
| JP3327068B2 (ja) | 路面計測装置 | |
| JPH11271038A (ja) | 塗装欠陥検査装置 | |
| JPH0979988A (ja) | 表面欠陥検査装置 | |
| JP2000321039A (ja) | 塗装欠陥検査装置及び方法 | |
| JP3758763B2 (ja) | 孔位置の光学的計測方法 | |
| JP3498532B2 (ja) | 車形判別装置 | |
| JPH03186706A (ja) | 3次元形状寸法計測装置 | |
| JP2001012913A (ja) | コイル位置検出装置 | |
| JP2630844B2 (ja) | 3次元形状寸法計測装置 | |
| JPH0949706A (ja) | レーザ光を用いた被計測物の前後方向の移動量測定方法 | |
| JP2001012917A (ja) | コイル位置検出装置 | |
| JPH1010053A (ja) | 表面欠陥検査装置 | |
| JPH11351842A (ja) | 車輪形状計測装置 | |
| JPH10185515A (ja) | コイル位置検出装置 | |
| JP2715897B2 (ja) | Icの異物検査装置及び方法 | |
| JP3112736B2 (ja) | 画像処理による板状体の厚み算出装置 | |
| JPH03276070A (ja) | 速度計測機能付き車番自動読取装置 | |
| JPH08159712A (ja) | パターン認識方法 | |
| JPH0772909B2 (ja) | 外観検査による溶接状態判定方法 | |
| JP3201297B2 (ja) | コイル位置検出装置 | |
| JPH0534117A (ja) | 画像処理方法 | |
| JPH10185519A (ja) | コイル位置検出装置 | |
| JP3011640B2 (ja) | シールド掘進機のテール部クリアランスの計測方法および計測装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20040227 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20040309 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20040507 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20041026 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20041102 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 3615980 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20071112 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20081112 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20081112 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20091112 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20091112 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101112 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111112 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121112 Year of fee payment: 8 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121112 Year of fee payment: 8 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131112 Year of fee payment: 9 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| EXPY | Cancellation because of completion of term |