JP3612256B2 - 作業機械の油圧回路 - Google Patents
作業機械の油圧回路 Download PDFInfo
- Publication number
- JP3612256B2 JP3612256B2 JP36544199A JP36544199A JP3612256B2 JP 3612256 B2 JP3612256 B2 JP 3612256B2 JP 36544199 A JP36544199 A JP 36544199A JP 36544199 A JP36544199 A JP 36544199A JP 3612256 B2 JP3612256 B2 JP 3612256B2
- Authority
- JP
- Japan
- Prior art keywords
- pressure
- valve
- telescopic
- bucket
- telescopic arm
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000008929 regeneration Effects 0.000 claims description 26
- 238000011069 regeneration method Methods 0.000 claims description 26
- 230000001172 regenerating effect Effects 0.000 claims description 18
- 230000006837 decompression Effects 0.000 claims description 9
- 238000001514 detection method Methods 0.000 claims description 4
- 239000003921 oil Substances 0.000 description 37
- 238000010586 diagram Methods 0.000 description 14
- 230000008901 benefit Effects 0.000 description 11
- 230000007423 decrease Effects 0.000 description 6
- 239000010720 hydraulic oil Substances 0.000 description 5
- 230000009471 action Effects 0.000 description 3
- 230000008602 contraction Effects 0.000 description 2
- 230000001276 controlling effect Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000009412 basement excavation Methods 0.000 description 1
- 230000000903 blocking effect Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000001105 regulatory effect Effects 0.000 description 1
Images







Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B11/00—Servomotor systems without provision for follow-up action; Circuits therefor
- F15B11/16—Servomotor systems without provision for follow-up action; Circuits therefor with two or more servomotors
- F15B11/161—Servomotor systems without provision for follow-up action; Circuits therefor with two or more servomotors with sensing of servomotor demand or load
- F15B11/166—Controlling a pilot pressure in response to the load, i.e. supply to at least one user is regulated by adjusting either the system pilot pressure or one or more of the individual pilot command pressures
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
- E02F3/36—Component parts
- E02F3/40—Dippers; Buckets ; Grab devices, e.g. manufacturing processes for buckets, form, geometry or material of buckets
- E02F3/413—Dippers; Buckets ; Grab devices, e.g. manufacturing processes for buckets, form, geometry or material of buckets with grabbing device
- E02F3/4135—Dippers; Buckets ; Grab devices, e.g. manufacturing processes for buckets, form, geometry or material of buckets with grabbing device with grabs mounted directly on a boom
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
- E02F3/36—Component parts
- E02F3/40—Dippers; Buckets ; Grab devices, e.g. manufacturing processes for buckets, form, geometry or material of buckets
- E02F3/413—Dippers; Buckets ; Grab devices, e.g. manufacturing processes for buckets, form, geometry or material of buckets with grabbing device
- E02F3/4136—Dippers; Buckets ; Grab devices, e.g. manufacturing processes for buckets, form, geometry or material of buckets with grabbing device with grabs mounted on a slidable or telescopic boom or arm
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2203—Arrangements for controlling the attitude of actuators, e.g. speed, floating function
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2221—Control of flow rate; Load sensing arrangements
- E02F9/2225—Control of flow rate; Load sensing arrangements using pressure-compensating valves
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2221—Control of flow rate; Load sensing arrangements
- E02F9/2239—Control of flow rate; Load sensing arrangements using two or more pumps with cross-assistance
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2278—Hydraulic circuits
- E02F9/2285—Pilot-operated systems
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2278—Hydraulic circuits
- E02F9/2292—Systems with two or more pumps
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B11/00—Servomotor systems without provision for follow-up action; Circuits therefor
- F15B11/16—Servomotor systems without provision for follow-up action; Circuits therefor with two or more servomotors
- F15B11/161—Servomotor systems without provision for follow-up action; Circuits therefor with two or more servomotors with sensing of servomotor demand or load
- F15B11/162—Servomotor systems without provision for follow-up action; Circuits therefor with two or more servomotors with sensing of servomotor demand or load for giving priority to particular servomotors or users
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/20—Fluid pressure source, e.g. accumulator or variable axial piston pump
- F15B2211/205—Systems with pumps
- F15B2211/20576—Systems with pumps with multiple pumps
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/30—Directional control
- F15B2211/31—Directional control characterised by the positions of the valve element
- F15B2211/3105—Neutral or centre positions
- F15B2211/3116—Neutral or centre positions the pump port being open in the centre position, e.g. so-called open centre
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/30—Directional control
- F15B2211/32—Directional control characterised by the type of actuation
- F15B2211/329—Directional control characterised by the type of actuation actuated by fluid pressure
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/40—Flow control
- F15B2211/405—Flow control characterised by the type of flow control means or valve
- F15B2211/40507—Flow control characterised by the type of flow control means or valve with constant throttles or orifices
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/40—Flow control
- F15B2211/405—Flow control characterised by the type of flow control means or valve
- F15B2211/40576—Assemblies of multiple valves
- F15B2211/40584—Assemblies of multiple valves the flow control means arranged in parallel with a check valve
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/40—Flow control
- F15B2211/415—Flow control characterised by the connections of the flow control means in the circuit
- F15B2211/41572—Flow control characterised by the connections of the flow control means in the circuit being connected to a pressure source and an output member
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/40—Flow control
- F15B2211/42—Flow control characterised by the type of actuation
- F15B2211/428—Flow control characterised by the type of actuation actuated by fluid pressure
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/40—Flow control
- F15B2211/455—Control of flow in the feed line, i.e. meter-in control
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/40—Flow control
- F15B2211/46—Control of flow in the return line, i.e. meter-out control
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/40—Flow control
- F15B2211/47—Flow control in one direction only
- F15B2211/473—Flow control in one direction only without restriction in the reverse direction
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/50—Pressure control
- F15B2211/575—Pilot pressure control
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/70—Output members, e.g. hydraulic motors or cylinders or control therefor
- F15B2211/705—Output members, e.g. hydraulic motors or cylinders or control therefor characterised by the type of output members or actuators
- F15B2211/7058—Rotary output members
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/70—Output members, e.g. hydraulic motors or cylinders or control therefor
- F15B2211/71—Multiple output members, e.g. multiple hydraulic motors or cylinders
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/70—Output members, e.g. hydraulic motors or cylinders or control therefor
- F15B2211/71—Multiple output members, e.g. multiple hydraulic motors or cylinders
- F15B2211/7142—Multiple output members, e.g. multiple hydraulic motors or cylinders the output members being arranged in multiple groups
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/70—Output members, e.g. hydraulic motors or cylinders or control therefor
- F15B2211/78—Control of multiple output members
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mining & Mineral Resources (AREA)
- Civil Engineering (AREA)
- Structural Engineering (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- Fluid Mechanics (AREA)
- Operation Control Of Excavators (AREA)
- Fluid-Pressure Circuits (AREA)
Description
【発明の属する技術分野】
本発明は、油圧ショベル等の作業機械の油圧回路に関し、特に、油圧ショベルをべースにした深礎掘削用多段伸縮アームを有する作業機械に用いて好適の、作業機械の油圧回路に関するものである。
【0002】
【従来の技術】
図8は一般的な多段伸縮アームを装着した油圧ショベルを示す模式的な側面図であって、油圧ショベルは、下部走行体1,下部走行体1に回転自在に結合された上部旋回体2,上部旋回体2に揺動自在に取付けられたブーム3,ブーム3の先端に揺動自在に取付けられた伸縮機能を有する多段伸縮アーム(伸縮アーム)4,多段伸縮アーム4の先端に取付けられたクラムシェルバケット5等をそなえている。ブーム3と上部旋回体2との間にはブームシリンダ3aが設けられ、ブームシリンダ3aの伸縮動作に応じてブーム3が揺動駆動される。同様に、ブーム3と多段伸縮アーム4との間にはアームシリンダ4aが設けられ、このアームシリンダ4aの伸縮動作に応じて多段伸縮アーム4が揺動駆動される。なお、多段伸縮アーム4にはシリンダ11〔図9参照〕が設けられ、多段伸縮アーム4を伸縮させることができる。また、クラムシェルバケット5は、その内部に設けられた油圧シリンダ5a〔図9参照〕を作動させることにより開閉可能に構成されている。
【0003】
図9は上記油圧ショベルの油圧回路の概略構成を示す模式図である。なお、パイロット回路については省略する。図9において、6は原動機、7a,7bは原動機6によって駆動される油圧ポンプ(圧力源)、8は油圧ポンプ7a,7bからの圧油(作動油)を制御して後述の各アクチュエータに流量配分するコントロールバルブユニットである。9は上部旋回体2を駆動する旋回モータ、10a,10bは下部走行体1に設けられた図示しない走行装置を駆動する走行モータである。また、3aはブームシリンダ、4aはアームシリンダ、5aはクラムシェルバケットを開閉するためのバケットシリンダ、11は多段伸縮アーム4を伸縮させるテレスコシリンダ、12はテレスコシリンダ11のロッド側室11bに設けられたスローリターン弁、17はタンクである。このうち、バケットシリンダ5aの図中上方の油圧室に作動油が供給されてバケットシリンダ5aが図中下方に移動すると、クラムシェルバケット5が開くように構成されている。また、スローリターン弁12の内部には絞り(オリフィス)が形成されており、多段伸縮アーム4の自重による急激な伸長が防止されるようになっている。
【0004】
また、13はコントロールバルブユニット8に内蔵されたテレスコシリンダ11を伸縮させるためのテレスコ用制御バルブ、14はバケットシリンダ5aを作動させるためのバケット用制御バルブ、15a,15bはテレスコ用制御バルブ13を制御するためのテレスコ用リモコンバルブ、16a,16bはバケット用制御バルブ14を制御するためのバケット用リモコンバルブである。このうち、テレスコ用リモコンバルブ15aは、テレスコシリンダ11を伸長させるためのリモコンバルブ(開操作器)であり、バケット用リモコンバルブ16aは、バケット5を開動作させるためのリモコンバルブ(開操作器)である。
【0005】
【発明が解決しようとする課題】
図9において、テレスコ用リモコンバルブ15aを操作するとコントロールバルブユニット8のテレスコ用制御バルブ13は室Nから室Xに切り換わり、テレスコシリンダ11のヘッド側室11aに油圧ポンプ7a,7bから圧油が供給され、ロッド側室11bの圧油はスローリターン弁12及びテレスコ用制御バルブ13の室Xを介してタンク17に導かれる。この時、テレスシリンダ11のロッド側室11bには、多段伸縮アーム4およびクラムシェルバケット5の自重が作用するため高い圧力が生じるが、ヘッド側室11aには負荷が加わらないので低圧になる。したがって、多段伸縮アーム4を伸ばしながら、バケット用リモコンバルブ16aを操作してクラムシェルバケット5を開こうとした場合に、油圧ポンプ7a,7bの圧油の多くは作動圧が低いテレスコシリンダ11のヘッド側室11aに流れるため、クラムシェルバケット5の開く速度が遅くなり、作業性が低下するという課題がある。
【0006】
本発明は、このような課題に鑑み創案されたもので、伸縮アームの伸長時のクラムシェルバケットの作動速度の低下を防止して、操作性の向上を図るようにした、作業機械の油圧回路を提供することを目的とする。
【0007】
【課題を解決するための手段】
このため、請求項1記載の本発明の作業機械の油圧回路は、伸縮アームと、該伸縮アームの先端に装着されたクラムシェルバケットとをそなえ、該伸縮アーム及び該クラムシェルバケットが共通の圧力源から供給される圧油により作動するように構成された作業機械の油圧回路において、該クラムシェルバケットを開動させるための操作圧に基づいて、該伸縮アームを伸び側に駆動するための操作圧を減圧する減圧手段をそなえ、該減圧手段が、該クラムシェルバケットを開動させるための操作圧を減圧して出力する第1の減圧手段と、該第1の減圧手段からの出力圧に基づいて該伸縮アームを伸び側に駆動するための操作圧を減圧する第2の減圧手段とをそなえていることを特徴としている。
【0009】
また、請求項2記載の本発明の作業機械の油圧回路は、伸縮アームと、該伸縮アームの先端に装着されたクラムシェルバケットとをそなえ、該伸縮アーム及び該クラムシェルバケットが共通の圧力源から供給される圧油により作動するように構成された作業機械の油圧回路において、該クラムシェルバケットを開動させるための操作圧に基づいて、該伸縮アームを伸び側に駆動するための操作圧を減圧する減圧手段をそなえ、該減圧手段が、該クラムシェルバケットを開動させるための操作圧を検出する操作圧検出手段と、該操作圧検出手段からの検出情報に基づいて該伸縮アームを伸び側に駆動するための操作圧を減圧する第3の減圧手段とをそなえていることを特徴としている。
【0010】
また、請求項3記載の本発明の作業機械の油圧回路は、伸縮アームと、該伸縮アームの先端に装着されたクラムシェルバケットとをそなえた作業機械の油圧回路において、該伸縮アームの作動シリンダと該クラムシェルバケットの開動側の出力圧供給路との間に配設され、該伸縮アームの伸び側駆動時における該作動シリンダからの戻り圧油を該出力圧供給路に供給可能に構成された再生バルブと、該伸縮アームを伸び側に駆動する際の操作圧に応じて切り換わり、該クラムシェルバケットを開動させる開操作圧を該再生バルブの駆動操作圧として該再生バルブに供給することで該再生バルブの作動状態を切り換える切換バルブとをそなえたことを特徴としている。
【0011】
また、請求項4記載の本発明の作業機械の油圧回路は、伸縮アームと、該伸縮アームの先端に装着されたクラムシェルバケットとをそなえた作業機械の油圧回路において、該伸縮アームの作動シリンダと該クラムシェルバケットの開動側の出力圧供給路との間に配設され、該伸縮アームの伸び側駆動時における該作動シリンダからの戻り圧油を該出力圧供給路に供給可能に構成された再生バルブをそなえ、該伸縮アームを伸び側に駆動する際の操作圧に基づいて、該再生バルブの作動状態が制御されるように構成されていることを特徴としている。
【0012】
【発明の実施の形態】
以下、図面により、本発明の実施の形態について説明する。
(A)第1実施形態の説明
まず、本発明の第1実施形態にかかる作業機械の油圧回路について説明すると、図1はその油圧回路の概略構成を示す模式図である。
【0013】
本第1実施形態の油圧回路において、基本的な機器の構成は図9に示す従来の油圧回路と同様であり、図9を用いて説明した部材については同一の符号を付し、その説明を省略する。
この第1実施形態の油圧回路では、図1に示すように、従来の構成に対してさらに、バケット用リモコンバルブ(開操作器)16aからのパイロット圧(操作圧)を減圧するための減圧弁(第1の減圧手段)20と、テレスコシリンダ11の伸び側のパイロット回路に設けられた外部パイロット式減圧弁(第2の減圧手段)21とをそなえている。
【0014】
外部パイロット式減圧弁21は、減圧弁20の出力圧に応じてその設定圧が制御されるものであり、減圧弁20の出力圧が最小圧の時(例えば、バケット用リモコンバルブ16aの非操作時)は、テレスコ用リモコンバルブ15aの出力圧が減圧されず高い圧に設定されるようになっている。また、バケット用リモコンバルブ16aが操作されて減圧弁20の出力圧が高くなると、その圧力に応じて外部パイロット式減圧弁21の作動が制御されて、リモコンバルブ15aのパイロット圧が減圧されるようになっている。そして、減圧弁20の出力圧が所定値以上となると、テレスコ用制御バルブ13へのパイロット圧が規定圧以上にならないようになっている。
【0015】
本発明の第1実施形態にかかる作業機械の油圧回路は上述のように構成されているので、その作用を説明すると以下のようになる。なお、以下では、テレスコシリンダ11の単独操作の場合とテレスコシリンダ11とバケットシリンダ5aとの連動操作との場合に分けて説明する。
(1)テレスコシリンダ単独操作
図1において、テレスコ用リモコンバルブ15aを操作すると、そのパイロット圧(操作圧)は配管L1及び外部パイロット式減圧弁21を介してテレスコ用制御バルブ13のパイロットポート13aに導かれ、テレスコ用制御バルブ13は室Nから室Xに切り換えられて、油圧ポンプ(圧力源)7a,7bの圧油はテレスコシリンダ11のヘッド側室11aに供給される。一方、テレスコシリンダ11のロッド側室11bの圧油は、スローリターン弁12及びテレスコ用制御バルブ13の室Xを介してタンク17に導かれ、テレスコシリンダ11が伸長する。
【0016】
この時、バケット用リモコンバルブ16aを操作していなければ、減圧弁20の出力圧は最小圧になり、外部パイロット式減圧弁21は最高圧に設定される。したがって、テレスコ用リモコンバルブ15aのパイロット圧は減圧されることなくテレスコ用制御バルブ13のパイロットポート13aに導かれ、同バルブ13を全開させるので、油圧ポンプ7a,7bの全流量がテレスコシリンダ11のヘッド側室11aに供給され、テレスコシリンダ11を最大速度で伸ばすことができる。
(2)テレスコシリンダとバケットシリンダとの連動操作
図1に示すように、多段伸縮アーム(伸縮アーム)4用のテレスコシリンダ11とクラムシェルバケット5用のシリンダ5aとの油圧回路は並列になっており、テレスコシリンダ11の伸長側への操作と同時にバケットシリンダ5aを操作すると、圧力が低いテレスコシリンダ11のみに圧油が流入しようとするが、本実施形態では、以下のような作用がある。
【0017】
つまり、テレスコ用リモコンバルブ15aの操作時にバケット用リモコンバルブ16aを操作すると、配管L2を介してバケット用制御バルブ14のパイロットポート14aにパイロット圧が導かれ、バケット用制御バルブ14が室Nから室Xに切換えられるとともに、前記パイロット圧は減圧弁20に導かれる。一方減圧弁20では、バケット用リモコンバルブ16aのパイロット圧が減圧され規定圧内に規制されて外部パイロット式減圧弁21のパイロットポート21aに出力されるので、バケット用リモコンバルブ16aの操作量の増加にともない、外部パイロット式減圧弁21の設定圧は最高圧から規定圧まで低下する。
【0018】
したがって、バケット用リモコンバルブ16aの操作にともない、テレスコ用リモコンバルブ15aのパイロット圧は外部パイロット式減圧弁21で減圧され、テレスコ用制御バルブ13のパイロット圧が規定圧以上に上がらないように制御される。その結果、テレスコ用制御バルブ13のストロークは、減圧されたパイロット圧による所定のストロークに制限され、油圧ポンプ7a,7bからテレスコシリンダ11に繋がるテレスコ用制御バルブ13の開口面積が絞られポンプ圧が上昇し、テレスコシリンダ11の伸長速度が低下するとともに、バケット用制御バルブ14からバケットシリンダ5aへの供給流量が増加し、クラムシェルバケット5の開く速度を高めることができる。
【0019】
以上の作用により、多段伸縮アーム4を伸ばしながらクラムシェルバケット5を開く操作をした時に、テレスコシリンダ11への圧油供給を制限して、クラムシェルバケット5に圧油を供給できるので、クラムシェルバケット5を速やかに開くことができ、従来技術で説明したクラムシェルバケット5の開く速度が遅いという課題を解決できるとともに、操作性の向上を図ることができる。また、従来の構成に対して、2つの減圧弁20,21を追加するだけでよいので、比較的安価で且つ容易に本装置を提供することができる利点がある。
(B)第2実施形態の説明
次に、本発明の第2実施形態にかかる作業機械の油圧回路について説明すると、図2はその油圧回路の概略構成を示す模式図、図3はその制御手段の構成を示す模式的なブロック図である。
【0020】
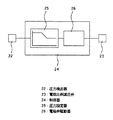
本第2実施形態においても、その基本的な構成は図9に示す従来の油圧回路と同様であり、図2に示すように、従来の構成に対して、バケット用リモコンバルブ(開操作器)16aの出力ポートに設けられた圧力検出器(操作圧検出手段)22と、テレスコ用リモコンバルブ15aとテレスコ用制御バルブ13のパイロットポート13aとの間に設けられた電磁比例減圧弁(第3の減圧手段)23と、圧力検出器22の信号に基づき電磁比例減圧弁23への駆動信号を出力する制御器(制御手段)24とをさらにそなえている。なお、すでに図9を用いて説明した部材については同一の符号を付し、その説明を省略する。
【0021】
また、図3に示すように、制御器24内には、圧力検出器22の信号に基づいて電磁比例減圧弁23の設定圧を出力する圧力設定器25及び圧力設定器25から出力される設定圧信号に基づいて電磁比例減圧弁23の駆動電流を出力する電磁弁駆動器26が設けられている。
ここで、圧力設定器25の特性について簡単に説明すると、この圧力設定器25では、基本的には、バケット用リモコンバルブ16aのパイロット圧(操作圧)が低い時には電磁比例減圧弁23の設定圧を高めるように設定されている。
【0022】
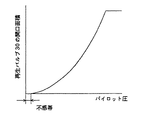
図3は、この圧力設定器25の特性の一例を示しており、パイロット圧がある範囲内に有る場合には、リモコンバルブ16aのパイロット圧の増大に応じて線形に電磁比例減圧弁23の設定圧を低下させるようになっている。また、パイロット圧が上記の範囲以下では、設定圧は最大値に固定されるようになっており、また、パイロット圧が上記の範囲以上の時には、設定圧は最低値に固定されるようになっている。
【0023】
本発明の第2実施形態にかかる作業機械の油圧回路は、上述のように構成されているので、その作用をテレスコシリンダ11の単独操作の場合とテレスコシリンダ11とバケットシリンダ5aとの連動操作との場合に分けて説明すると以下のようになる。
(1)テレスコシリンダ単独操作
まず、バケット用リモコンバルブ16aが非操作状態において、テレスコ用リモコンバルブ15aを操作すると、同リモコンバルブ15aのパイロット圧は電磁比例減圧弁23に導かれる。
【0024】
このとき、圧力検出器22で検出されるリモコンバルブ16aのパイロット圧は最低値となっているため、圧力設定器25では、バケット用リモコンバルブ16aのパイロット圧が最高圧になるように信号を出力し、電磁弁駆動器26を介して電磁比例減圧弁23が駆動される。このため、テレスコ用リモコンハルブ15aのパイロット圧は、例えば減圧されずそのまま出力されテレスコ用制御バルブ13のパイロットポート13aに導かれる。この結果、油圧ポンプ7a,7bの全流量がテレスコ用制御バルブ13を介してテレスコシリンダ11に供給され、テレスコシリンダ11を最大速度で伸長させることができる。
(2)テレスコシリンダとバケットシリンダとの連動操作
バケット用リモコンバルブ16aが操作されると、圧力検出器22によりそのパイロット圧が検出され、圧力設定器25で電磁比例減圧弁23に対する制御信号が設定される。そして、リモコンバルブ16aが全開操作されると、そのパイロット圧の増大に応じて電磁比例減圧弁23の出力が最高圧から規定圧まで徐々に低下する。したがって、テレスコ用リモコンバルブ15aのパイロット圧は電磁比例減圧弁23により規定圧に制限され、この減圧されたパイロット圧がテレスコ用制御バルブ13のパイロットポート13aに出力される。
【0025】
この結果、テレスコ用制御バルブ13のストロークは減圧されたパイロット圧に応じた所定ストロークに制限されるので、油圧ポンプ7a,7bからテレスコシリンダに繋がるテレスコ用制御バルブ13の開口面積が絞られ、ポンプ圧が上昇する。したがって、バケット用制御バルブ14からバケットシリンダ5aへの作動油供給流量が増加し、クラムシェルバケット5の開く速度を高めることができる。
【0026】
以上の作用により、上記第1実施形態と同様に、多段伸縮アーム4を伸ばしながらクラムシェルバケット5を開く操作をした時に、クラムシェルバケット5を速やかに開くことができ、従来技術で説明したクラムシェルバケット5の開く速度が遅いという課題を解決でき、操作性の向上を図ることができる。また、従来の油圧回路に対して、油圧機器としては減圧弁23を追加するだけでよいので、比較的安価で且つ容易に本装置を提供することができる利点がある。
【0027】
なお、制御器24の圧力設定器25の特性を図示しないメモリに複数ストアしておき、作業状況や装着されたクラムシェルバケット等に応じて圧力設定器25の特性を適宜変更するように構成してもよい。これにより、圧力検出器22の信号に基づいて制御器24で電磁比例減圧弁23の信号を自由に設定できるので、異なる重量のバケット5を装着した場合や異なるテレスコシリンダ11を装着した場合に、第1実施形態のものよりも速度調整が容易となり、運転調整が簡単になるという利点もある。
(C)第3実施形態の説明
次に、本発明の第3実施形態にかかる作業機械の油圧回路について説明すると、図4はその油圧回路の概略構成を示す模式図、図5及び図6はいずれもその制御特性を説明するための図である。
【0028】
また、本第3実施形態の油圧回路についても、その基本的な構成は図9に示す従来の油圧回路と同様であり、図9を用いて説明した部材については同一の符号を付し、その説明を省略する。
この第3実施形態では、図4に示すように、従来の構成に対して、テレスコシリンダ(作動シリンダ)11のロッド側室11bの圧油をバケット用制御バルブ14とポンプ7bとの間の出力圧供給路sに導くための再生バルブ30と、この再生バルブ30とバケット制御バルブ14との間に設けられた合流用チェック弁31と、テレスコ用リモコンバルブ15aのパイロット圧(操作圧)により切り換え制御される切換バルブ32とをさらにそなえて構成されている。
【0029】
切換バルブ32の入力ポートpには、バケット用リモコンバルブ16aのパイロット圧が導かれ、出力ポートdは再生バルブ30のパイロットポート30aに接続されている。また、切換バルブ32は、テレスコシリンダ11を伸び側に駆動する際のパイロット圧に基づいてその作動状態が制御されるようになっており、再生バルブ30は、切換バルブ32の作動状態に応じてその作動状態が制御されるようになっている。そして、この再生バルブ30の作動状態に応じて、テレスコシリンダ11のロッド側室11bの作動油(戻り圧油)が出力圧供給路sに供給されるようになっている。
【0030】
本発明の第3実施形態にかかる作業機械の油圧回路は、上述のように構成されているので、その作用をテレスコシリンダ11の単独操作の場合とテレスコシリンダ11とバケットシリンダ5aとの連動操作との場合に分けて説明すると以下のようになる。
(1)テレスコシリンダの単独操作
テレスコ用リモコンバルブ15aを操作すると、そのパイロット圧は配管L1を介してテレスコ用制御バルブ13のパイロットポート13aに導かれ、テレスコ用制御バルブ13が室Nから室Xに切り換えられるとともに、このパイロット圧は切換バルブ32のパイロットポート32aにも供給されて、切換バルブ32が室Cから室Aに切り換えられる。これにより、バケット用リモコンバルブ16aのパイロット圧の配管L2と再生バルブ30のパイロットポート30aとが切換バルブ32を介して接続される。
【0031】
上記の状態で、バケット用リモコンバルブ16aを操作していない場合は、切換バルブ30のパイロットポート30aに圧力が立たないので、再生バルブ30は図4に示す状態に保持される。したがって、油圧ポンプ7a,7bの圧油がテレスコシリンダ11のヘッド側室11aに供給されると、テレスコシリンダ11のロッド側室11bの圧油は、スローリターン弁12及びテレスコ用制御バルブ13の室Xを介してタンク17に導かれ、テレスコシリンダ11が伸長する。
(2)テレスコシリンダとバケットシリンダとの連動操作
上記の状態から、バケット用リモコンバルブ16aを操作すると、リモコンバルブ16aのパイロット圧は、配管L2及び切換バルブ32の室Aを介して、再生バルブ30のパイロットポート30aに導かれ、再生バルブ30が室Cから室Aに切り換えられる。
【0032】
これにより、テレスコシリンダ11のロッド側室11bとバケット制御バルブ14とが接続された状態となる。一方、上記ロッド側室11bは、多段伸縮アーム4およびクラムシェルバケット5の自重により高い圧力が発生するので、その圧油(戻り圧油)の一部が再生バルブ30,合流チェック弁31及び出力圧供給路sを介してバケット制御バルブ14に供給される。
【0033】
したがって、テレスコ用リモコンバルブ15aとバケット用リモコンバルブ16aとが連動操作した時のみ、テレスコシリンダ11のロッド側室11bの圧油がバケットシリンダ5aに供給されることになり、これによりクラムシェルバケット5の開く速度を速くすることができるのである。
なお、テレスコシリンダ11が低速で作動している時にバケット用リモコンバルブ16aを操作すると、再生バルブ30が連通状態となることによりテレスコシリンダ11のロッド側室11bの圧油の排出流量が急激に増えて、ロッド側室11bの圧力が低下し、テレスコシリンダ11の速度が急激に上昇するようなことも考えられる。そこで、本第3実施形態では、上述のような事態を回避すべく、切換バルブ32のポートpからポートdまでの間の開口特性が例えば図5に示すように設定されている。
【0034】
すなわち、テレスコ用リモコンバルブ15aのパイロット圧が低い時には、ポートpとポートdとの間を完全に遮断する領域(不感帯)が設けられ、パイロット圧が上昇すると、このパイロット圧の増加に応じて緩やかに開口面積が増加するように設定されている。
なお、図5では、パイロット圧の増加に応じて2次曲線的に開口面積が増加するような特性を示しているが、この切換バルブ32の特性は、図5に示すものに限定されるものではなく、少なくともパイロット圧が所定値以上になるとこのパイロット圧の増加に応じて、開口面積が徐々に増加するような特性であれば、他の特性であってもよい。
【0035】
また、上記と同様の理由から、再生バルブ30についても例えば図6に示すような特性に設定されている。すなわち、バケット用リモコンバルブ16aのパイロット圧(パイロットポート30aに作用するパイロット圧)が増加すると、これにともなって緩やかに再生バルブ30の開口面積が徐々に増加する特性に設定されているのである。なお、再生バルブ30の特性についても、図6に示すものに限定されるものではなく、図5で説明したように、種々の変形が可能である。さらに、図6に示す例では、パイロット圧が微小な範囲では再生バルブ30の開口面積が0の領域(不感帯)が設けられているが、このような不感帯は他の設計事項の調整によっては設けなくてもよい。
【0036】
そして、上述のように、切換バルブ32及び再生バルブ30の特性を適宜設定することにより、バケットシリンダ5aおよびテレスコシリンダ11の速度変化を滑らかにすることができるのである。
以上の作用により、多段伸縮アーム4の伸び操作とクラムシェルバケット5の開く操作を連動した時には、テレスコシリンダ11の圧油がバケットシリンダ5aに供給されるので、テレスコシりシダ11の伸び速度を低下させることなく、クラムシェルバケット5の開く速度を高めることができ、従来技術で説明したようなクラムシェルバケット5の開く速度が遅いという課題を解消でき、操作性の向上を図ることができる。
【0037】
また、テレスコシリンダ11の圧油をバケットシリンダ5aに供給するので、上述した第1及び第2実施形態のようにテレスコ用制御バルブ13のパイロット圧を制限して同バルブ13を絞る必要がないため、ポンプ圧を必要以上に上昇させる必要がなく、省エネ化を図ることができ作業効率を上げることができるという利点も有している。
(D)第4実施形態の説明
次に、本発明の第4実施形態にかかる作業機械の油圧回路について説明すると、図7はその油圧回路の概略構成を示す模式図である。また、本第4実施形態の油圧回路についても、その基本的な構成は図9に示す従来の油圧回路と同様であり、図9を用いて説明した部材については同一の符号を付し、その説明を省略する。
【0038】
この第4実施形態では、従来の構成に対して、図7に示すように、テレスコシリンダ11のロッド側室11bの圧油を油圧ポンプ7bの吐出側に合流させるための再生バルブ35と、再生バルブ35と油圧ポンプ7bの吐出ポートとの間に設けられた合流用チェック弁36とをさらにそなえて構成されている。なお、図示するように、油圧ポンプ7bの下流側は、クラムシェルバケット5の出力圧供給路sに接続されているので、再生バルブ35は、多段伸縮アーム4のシリンダ11と、クラムシェルバケット5の出力圧供給路sとの間に設けられているとも言える。再生バルブ35は、通常はロッド側室11bと油圧ポンプ7bの吐出側とを遮断し、パイロット圧が供給されるとこれらを連通するような切換弁であって、その連通路には絞り(オリフィス)が形成されている。
【0039】
また、図示するように、再生バルブ35のパイロットポート35aには、テレスコ用リモコンバルブ15aのパイロット圧供給配管L1が接続されている。
本発明の第4実施形態にかかる作業機械の油圧回路は、上述のように構成されているので、その作用をテレスコシリンダ11の単独操作の場合とテレスコシリンダ11とバケットシリンダ5aとの連動操作との場合に分けて説明すると以下のようになる。
(1)テレスコシリンダ単独操作
テレスコ用リモコンバルブ15aを操作すると、そのパイロット圧は配管L1を介してテレスコ用制御バルブ13のパイロットポート13aに供給され、テレスコ用制御バルブ13が室Nから室Xに切り換えられるとともに、このパイロット圧は再生バルブ35のパイロットポート35aにも導かれ、再生バルブ35が室Cから室Aに切り換えられる。これにより、テレスコシリンダ11のロッド側室11bと油圧ポンプ7bの吐出側とが再生バルブ35を介して接続される。
【0040】
また、油圧ポンプ7a,7bからの圧油はテレスコ用制御バルブ13を介してテレスコシリンダ11のヘッド側室11aに供給され、一方テレスコシリンダ11のロッド側室11bの圧油の一部は、スローリターン弁12及びテレスコ用制御バルブ13の室Xを介してタンク17に導かれ、残りの圧油は再生バルブ35及び合流チェック弁36を介して油圧ポンプ7bの吐出圧油と合流して、コントロールバルブユニット8内に供給される。したがって、テレスコシリンダ11のヘッド側室11aに供給される圧油が従来の油圧回路よりも増大するので、従来よりも速い速度でテレスコシリンダ11を伸長させることができる。
(2)テレスコシリンダとバケットシリンダとの連動操作
上記の状態から、バケット用リモコンバルブ16aを操作すると、同リモコンバルブ16aのパイロット圧はバケット用制御バルブ14のパイロットポート14aに導かれ、室Nから室Xに切り換えられる。テレスコシリンダ11のロッド側室11bには、多段伸縮アーム4およびクラムシェルバケット5の自重により高圧が発生するので、その圧油の一部が再生バルブ35及び合流チェック弁36を介して油圧ポンプ7bの吐出側に供給され、ポンプ圧は比較的高くなる。
【0041】
したがって、バケット制御バルブ14の室Xを介してバケットシリンダ5aに油圧ポンプ7a,7bの吐出圧よりも高圧の圧油が供給されるので、クラムシェルバケット5を速やかに開くことができるのである。
以上の作用により、テレスコシリンダ11の圧油の一部をポンプ吐出側に供給するので、テレスコシリンダ11の単独操作時には供給流量が増加し、上記の各実施形態の油圧回路に比較して、テレスコシリンダ11の伸び速度を高めることができる。また、第1及び第2実施形態では、多段伸縮アーム4の伸び操作とクラムシェルバケット5の開き操作とを連動した時にテレスコシリンダ11の速度が低下するが、本実施形態では、テレスコシリンダ11の圧油をポンプ7bの吐出側に供給するので、テレスコシリンダ11の伸び速度を確保でき、かつクラムシェルバケット5の開閉速度を高めることができる。したがって、作業速度を高めることができるとともに、かつクラムシェルバケット5の開く速度が遅いという課題を解消でき、操作性及び作業効率の向上を図ることができるという利点がある。
(E)その他
本発明の作業機械の油圧回路は、上述の実施形態のものに限定されるものでなく、本発明の趣旨を逸脱しない範囲で種々の変形が可能である。例えば、油圧回路の細部の構成や制御特性は、設計条件の変更や機種の仕様等に応じて適宜変更することができる。
【0042】
【発明の効果】
以上詳述したように、請求項1記載の本発明の作業機械の油圧回路によれば、クラムシェルバケットを開動させるための操作圧に基づいて、伸縮アームを伸び側に駆動するための操作圧を減圧する減圧手段をそなえるという構成により、伸縮アームを伸ばしながらクラムシェルバケットを開く操作をした時に、伸縮アームを伸び側に駆動するための圧油供給が制限されて、この分だけクラムシェルバケットに対する圧油の供給量を増大させることができる。したがって、クラムシェルバケットを速やかに開くことができ、クラムシェルバケットの開く速度が遅いという課題を解決できるとともに、操作性の向上を図ることができるという利点がある。
【0043】
さらに、クラムシェルバケットを開動させるための開操作器の操作圧を減圧して出力する第1の減圧手段と、第1の減圧手段からの出力圧に基づいて伸縮アームを伸び側に駆動するための作動油圧を減圧する第2の減圧手段とをそなえるという構成により、安価で且つ容易に本装置を提供することができる利点がある。
【0044】
また、請求項2記載の本発明の作業機械の油圧回路によれば、伸縮アームを伸ばしながらクラムシェルバケットを開く操作をした時に、伸縮アームを伸び側に駆動するための圧油供給が制限されて、この分だけクラムシェルバケットに対する圧油の供給量を増大させることができる。したがって、クラムシェルバケットを速やかに開くことができ、クラムシェルバケットの開く速度が遅いという課題を解決できるとともに、操作性の向上を図ることができるという利点がある。
また、クラムシェルバケットを開動させるための開操作器の操作圧を検出する操作圧検出手段と、操作圧検出手段からの検出情報に基づいて伸縮アームを伸び側に駆動するための作動油圧を減圧する第3減圧手段とをそなえるという構成により、従来の油圧回路に対して、油圧機器としては1つの減圧手段を追加するだけでよいので、安価で且つ容易に本装置を提供することができる利点がある。
【0045】
また、請求項3記載の本発明の作業機械の油圧回路によれば、該伸縮アームの作動シリンダと該クラムシェルバケットの開動側の出力圧供給路との間に配設され、該伸縮アームの伸び側駆動時における該作動シリンダからの戻り圧油を該出力圧供給路に供給可能に構成された再生バルブと、該伸縮アームの伸び操作圧に応じて切り換わり、該クラムシェルバケットを開動させる開操作圧を該再生バルブの駆動操作圧として該再生バルブに供給することで該再生バルブの作動状態を切り換える切換バルブとをそなえるという構成により、伸縮アームの伸び操作とクラムシェルバケットの開操作とを連動させた時に、伸縮アームの伸び速度を低下させることなく、クラムシェルバケットの開く速度を高めることができるという利点がある。したがって、クラムシェルバケットの開く速度が遅いという課題を解決できるとともに、操作性の向上を図ることができる。
【0046】
また、請求項4記載の本発明の作業機械の油圧回路によれば、該伸縮アームの作動シリンダと該クラムシェルバケットの開動側の出力圧供給路との間に配設され、該伸縮アームの伸び側駆動時における該作動シリンダからの戻り圧油を該出力圧供給路に供給可能に構成された再生バルブをそなえ、該伸縮アームを伸び側に駆動する際の操作圧に基づいて、該再生バルブの作動状態が制御されるという構成により、伸縮アームの伸び操作とクラムシェルバケットの開操作とを連動させた時に、伸縮アームの伸び速度を低下させることなく、クラムシェルバケットの開く速度を高めることができるという利点がある。したがって、クラムシェルバケットの開く速度が遅いという課題を解決できるとともに、操作性の向上を図ることができる。
【図面の簡単な説明】
【図1】本発明の第1実施形態にかかる作業機械の油圧回路の概略構成を示す模式図である。
【図2】本発明の第2実施形態にかかる作業機械の油圧回路の概略構成を示す模式図である。
【図3】本発明の第2実施形態にかかる作業機械の油圧回路における制御手段の構成を示す模式的なブロック図である。
【図4】本発明の第3実施形態にかかる作業機械の油圧回路の概略構成を示す模式図である。
【図5】本発明の第3実施形態にかかる作業機械の油圧回路の制御特性を説明するための図である。
【図6】本発明の第3実施形態にかかる作業機械の油圧回路の制御特性を説明するための図である。
【図7】本発明の第4実施形態にかかる作業機械の油圧回路の概略構成を示す模式図である。
【図8】一般的な多段伸縮アームを装着した油圧ショベルを示す模式的な側面図である。
【図9】一般的な多段伸縮アームを装着した油圧ショベルの油圧回路の概略構成を示す模式図である。
【符号の説明】
1 下部走行体
2 上部旋回体
3 ブーム
3a ブームシリンダ
4 多段伸縮アーム(伸縮アーム)
4a アームシリンダ
5 クラムシェルバケット
5a 油圧シリンダ
6 原動機
7a,7b 油圧ポンプ(圧力源)
8 コントロールバルブユニット
9 旋回モータ
10a,10b 走行モータ
11 テレスコシリンダ(作動シリンダ)
12 スローリターン弁、
13 テレスコ用制御バルブ
14 バケット用制御バルブ
15a,15b テレスコ用リモコンバルブ
16a バケット用リモコンバルブ(開操作器)
17 タンク
20 減圧弁(第1の減圧手段)
21 外部パイロット式減圧弁(第2の減圧手段)
22 圧力検出器(操作圧検出手段)
23 電磁比例減圧弁(減圧手段)
35 再生バルブ
32 切換バルブ
s 出力圧供給路
Claims (4)
- 伸縮アームと、該伸縮アームの先端に装着されたクラムシェルバケットとをそなえ、該伸縮アーム及び該クラムシェルバケットが共通の圧力源から供給される圧油により作動するように構成された作業機械の油圧回路において、
該クラムシェルバケットを開動させるための操作圧に基づいて、該伸縮アームを伸び側に駆動するための操作圧を減圧する減圧手段をそなえ、
該減圧手段が、
該クラムシェルバケットを開動させるための操作圧を減圧して出力する第1の減圧手段と、
該第1の減圧手段からの出力圧に基づいて該伸縮アームを伸び側に駆動するための操作圧を減圧する第2の減圧手段とをそなえている
ことを特徴とする、作業機械の油圧回路。 - 伸縮アームと、該伸縮アームの先端に装着されたクラムシェルバケットとをそなえ、該伸縮アーム及び該クラムシェルバケットが共通の圧力源から供給される圧油により作動するように構成された作業機械の油圧回路において、
該クラムシェルバケットを開動させるための操作圧に基づいて、該伸縮アームを伸び側に駆動するための操作圧を減圧する減圧手段をそなえ、
該減圧手段が、
該クラムシェルバケットを開動させるための操作圧を検出する操作圧検出手段と、
該操作圧検出手段からの検出情報に基づいて該伸縮アームを伸び側に駆動するための操作圧を減圧する第3の減圧手段とをそなえている
ことを特徴とする、作業機械の油圧回路。 - 伸縮アームと、該伸縮アームの先端に装着されたクラムシェルバケットとをそなえた作業機械の油圧回路において、
該伸縮アームの作動シリンダと該クラムシェルバケットの開動側の出力圧供給路との間に配設され、該伸縮アームの伸び側駆動時における該作動シリンダからの戻り圧油を該出力圧供給路に供給可能に構成された再生バルブと、
該伸縮アームを伸び側に駆動する際の操作圧に応じて切り換わり、該クラムシェルバケットを開動させる開操作圧を該再生バルブの駆動操作圧として該再生バルブに供給することで該再生バルブの作動状態を切り換える切換バルブとをそなえたことを特徴とする、作業機械の油圧回路。 - 伸縮アームと、該伸縮アームの先端に装着されたクラムシェルバケットとをそなえた作業機械の油圧回路において、
該伸縮アームの作動シリンダと該クラムシェルバケットの開動側の出力圧供給路との間に配設され、該伸縮アームの伸び側駆動時における該作動シリンダからの戻り圧油を該出力圧供給路に供給可能に構成された再生バルブをそなえ、
該伸縮アームを伸び側に駆動する際の操作圧に基づいて、該再生バルブの作動状態が制御されるように構成されている
ことを特徴とする、作業機械の油圧回路。
Priority Applications (7)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP36544199A JP3612256B2 (ja) | 1999-12-22 | 1999-12-22 | 作業機械の油圧回路 |
| CN03131419.8A CN1242129C (zh) | 1999-12-22 | 2000-11-02 | 工程机械的液压回路 |
| PCT/JP2000/007723 WO2001046527A1 (fr) | 1999-12-22 | 2000-11-02 | Circuit hydraulique de machine de travaux publics |
| EP00971744A EP1172488B1 (en) | 1999-12-22 | 2000-11-02 | Hydraulic circuit of working machine |
| US09/890,876 US6557277B1 (en) | 1999-12-22 | 2000-11-02 | Hydraulic circuit of working machine |
| EP04011184A EP1447480B1 (en) | 1999-12-22 | 2000-11-02 | Working machine |
| CN00804130.XA CN1128907C (zh) | 1999-12-22 | 2000-11-02 | 工程机械的液压回路 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP36544199A JP3612256B2 (ja) | 1999-12-22 | 1999-12-22 | 作業機械の油圧回路 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2001182100A JP2001182100A (ja) | 2001-07-03 |
| JP3612256B2 true JP3612256B2 (ja) | 2005-01-19 |
Family
ID=18484273
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP36544199A Expired - Fee Related JP3612256B2 (ja) | 1999-12-22 | 1999-12-22 | 作業機械の油圧回路 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US6557277B1 (ja) |
| EP (2) | EP1172488B1 (ja) |
| JP (1) | JP3612256B2 (ja) |
| CN (2) | CN1242129C (ja) |
| WO (1) | WO2001046527A1 (ja) |
Families Citing this family (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE10047175A1 (de) * | 2000-09-22 | 2002-04-11 | Mannesmann Rexroth Ag | Verfahren und Steueranordnung zur Ansteuerung von hydraulischen Verbrauchern |
| JP2003232303A (ja) * | 2002-02-12 | 2003-08-22 | Shin Caterpillar Mitsubishi Ltd | 流体圧回路 |
| JP3818252B2 (ja) * | 2002-10-31 | 2006-09-06 | コベルコ建機株式会社 | 油圧ショベルの油圧回路 |
| JP4931048B2 (ja) * | 2006-07-31 | 2012-05-16 | キャタピラー エス エー アール エル | 作業機械の制御装置 |
| JP2011106591A (ja) * | 2009-11-18 | 2011-06-02 | Hitachi Constr Mach Co Ltd | 建設機械の油圧駆動装置 |
| JP5750454B2 (ja) * | 2011-01-06 | 2015-07-22 | 日立建機株式会社 | 履帯式走行装置を備えた作業機の油圧駆動装置 |
| JP5567512B2 (ja) * | 2011-02-21 | 2014-08-06 | 日立建機株式会社 | 深掘掘削機 |
| CN102619794B (zh) * | 2012-03-28 | 2014-12-10 | 三一汽车起重机械有限公司 | 单缸插销伸缩控制系统及工程机械 |
| CN104838073B (zh) | 2012-11-23 | 2017-03-08 | 沃尔沃建造设备有限公司 | 用于控制工程机械的优先功能的设备和方法 |
| CN103047204B (zh) * | 2013-01-05 | 2015-06-17 | 中联重科股份有限公司 | 工程机械及其液控操作系统、方法 |
| JP6307292B2 (ja) * | 2014-01-31 | 2018-04-04 | Kyb株式会社 | 作業機の制御システム |
| US11105347B2 (en) * | 2017-07-20 | 2021-08-31 | Eaton Intelligent Power Limited | Load-dependent hydraulic fluid flow control system |
| JP6982474B2 (ja) * | 2017-11-22 | 2021-12-17 | 川崎重工業株式会社 | 油圧駆動システム |
| JP6893894B2 (ja) * | 2018-03-27 | 2021-06-23 | ヤンマーパワーテクノロジー株式会社 | 作業車両の油圧回路 |
| JP6687054B2 (ja) * | 2018-03-29 | 2020-04-22 | コベルコ建機株式会社 | 旋回式作業機械 |
| JP2019190226A (ja) * | 2018-04-27 | 2019-10-31 | Kyb株式会社 | 流体圧制御装置 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3574387A (en) * | 1968-11-12 | 1971-04-13 | Mcginnes Mfg Co | Power assembly for grapple or bucket |
| FR2357764A1 (fr) * | 1976-07-06 | 1978-02-03 | Poclain Sa | Dispositif de commande d'au moins deux organes moteurs a fluide |
| FR2483486A1 (fr) * | 1980-05-28 | 1981-12-04 | Poclain Sa | Engin de terrassement du type chargeuse |
| DE4137963C2 (de) * | 1991-10-30 | 1995-03-23 | Rexroth Mannesmann Gmbh | Ventilanordnung zur lastunabhängigen Steuerung mehrerer hydraulischer Verbraucher |
| JP3129495B2 (ja) * | 1991-12-13 | 2001-01-29 | 株式会社小松製作所 | 昇降作業機の位置エネルギ回収装置 |
| US5375348A (en) * | 1992-04-23 | 1994-12-27 | Japanic Corporation | Deep excavator |
| JP3553186B2 (ja) * | 1995-03-09 | 2004-08-11 | 株式会社小松製作所 | テレスコピック用シリンダの油圧回路 |
| US5540005A (en) * | 1995-07-21 | 1996-07-30 | Lynch; Robert P. | Contaminated marine sediments dredging apparatus |
| DE19720454B4 (de) * | 1997-05-15 | 2008-10-23 | Linde Material Handling Gmbh | Hydrostatisches Antriebssystem |
| JP3763375B2 (ja) * | 1997-08-28 | 2006-04-05 | 株式会社小松製作所 | 建設機械の制御回路 |
| JPH11270505A (ja) * | 1998-03-24 | 1999-10-05 | Sumitomo Constr Mach Co Ltd | 伸縮アーム式深穴掘削機における油圧制御回路 |
-
1999
- 1999-12-22 JP JP36544199A patent/JP3612256B2/ja not_active Expired - Fee Related
-
2000
- 2000-11-02 CN CN03131419.8A patent/CN1242129C/zh not_active Expired - Fee Related
- 2000-11-02 EP EP00971744A patent/EP1172488B1/en not_active Expired - Lifetime
- 2000-11-02 CN CN00804130.XA patent/CN1128907C/zh not_active Expired - Fee Related
- 2000-11-02 EP EP04011184A patent/EP1447480B1/en not_active Expired - Lifetime
- 2000-11-02 WO PCT/JP2000/007723 patent/WO2001046527A1/ja active IP Right Grant
- 2000-11-02 US US09/890,876 patent/US6557277B1/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| CN1242129C (zh) | 2006-02-15 |
| US6557277B1 (en) | 2003-05-06 |
| CN1515758A (zh) | 2004-07-28 |
| EP1447480B1 (en) | 2007-05-02 |
| CN1128907C (zh) | 2003-11-26 |
| EP1172488B1 (en) | 2007-03-07 |
| CN1341184A (zh) | 2002-03-20 |
| EP1447480A3 (en) | 2004-08-25 |
| EP1172488A1 (en) | 2002-01-16 |
| WO2001046527A1 (fr) | 2001-06-28 |
| JP2001182100A (ja) | 2001-07-03 |
| EP1172488A4 (en) | 2003-07-23 |
| EP1447480A2 (en) | 2004-08-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3612256B2 (ja) | 作業機械の油圧回路 | |
| WO2011046184A1 (ja) | 作業機械の油圧システム | |
| KR20140034214A (ko) | 작업 기계의 유압 구동 장치 | |
| EP2354331B1 (en) | Hydraulic drive device for hydraulic excavator | |
| KR101121705B1 (ko) | 건설기계의 붐 위치에너지 회생 장치 및 방법 | |
| JP2010078035A (ja) | 作業機械の油圧シリンダ制御回路 | |
| JP4715400B2 (ja) | 建設機械の油圧制御装置 | |
| JP2009167618A (ja) | 油圧ショベルの油圧回路 | |
| JP2009127643A (ja) | 建設機械のブーム駆動回路 | |
| JP2009150462A (ja) | 作業機械における油圧制御システム | |
| JP2013508647A (ja) | バルブ固着の安全機構 | |
| WO2011009705A1 (en) | Control arrangement | |
| JP3946176B2 (ja) | 油圧ショベルの油圧回路 | |
| JP6157994B2 (ja) | 建設機械の油圧回路及び建設機械 | |
| JP2013147886A (ja) | 建設機械 | |
| JP2017015130A (ja) | 流体回路 | |
| JP2002349505A (ja) | 油圧アクチュエータ回路 | |
| JP2018145726A (ja) | ショベル | |
| JP6909115B2 (ja) | 油圧ショベル | |
| KR200397109Y1 (ko) | 연장 가능한 붐을 가지는 스키드 로더 | |
| JP4700447B2 (ja) | クレーン仕様付油圧ショベル | |
| JP3779488B2 (ja) | 建設機械の油圧駆動装置 | |
| JP6605413B2 (ja) | 作業機械の油圧駆動装置 | |
| JP2015048857A (ja) | 建設機械の油圧回路及び建設機械 | |
| WO2023248680A1 (ja) | 液圧駆動装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20040629 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20040824 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20041005 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20041022 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101029 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111029 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111029 Year of fee payment: 7 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111029 Year of fee payment: 7 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111029 Year of fee payment: 7 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |