JP3545995B2 - ロボットの関節構造 - Google Patents
ロボットの関節構造 Download PDFInfo
- Publication number
- JP3545995B2 JP3545995B2 JP2000174696A JP2000174696A JP3545995B2 JP 3545995 B2 JP3545995 B2 JP 3545995B2 JP 2000174696 A JP2000174696 A JP 2000174696A JP 2000174696 A JP2000174696 A JP 2000174696A JP 3545995 B2 JP3545995 B2 JP 3545995B2
- Authority
- JP
- Japan
- Prior art keywords
- gear
- robot
- motor
- reduction
- case
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images


Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/10—Programme-controlled manipulators characterised by positioning means for manipulator elements
- B25J9/102—Gears specially adapted therefor, e.g. reduction gears
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H1/00—Toothed gearings for conveying rotary motion
- F16H1/28—Toothed gearings for conveying rotary motion with gears having orbital motion
- F16H1/32—Toothed gearings for conveying rotary motion with gears having orbital motion in which the central axis of the gearing lies inside the periphery of an orbital gear
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T74/00—Machine element or mechanism
- Y10T74/20—Control lever and linkage systems
- Y10T74/20207—Multiple controlling elements for single controlled element
- Y10T74/20305—Robotic arm
- Y10T74/20311—Robotic arm including power cable or connector
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T74/00—Machine element or mechanism
- Y10T74/20—Control lever and linkage systems
- Y10T74/20207—Multiple controlling elements for single controlled element
- Y10T74/20305—Robotic arm
- Y10T74/20317—Robotic arm including electric motor
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T74/00—Machine element or mechanism
- Y10T74/20—Control lever and linkage systems
- Y10T74/20207—Multiple controlling elements for single controlled element
- Y10T74/20305—Robotic arm
- Y10T74/20329—Joint between elements
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Robotics (AREA)
- Manipulator (AREA)
- Retarders (AREA)
Description
【発明の属する技術分野】
本発明は、ロボットの旋回胴、アーム等のロボット移動部材間の関節部における動力を伝達する関節構造に関する。
【0002】
【従来の技術】
産業用ロボットにおいては、ロボットベースに対して旋回する胴部、該胴部上で揺動するアーム、さらにはアーム上でさらに揺動する第2のアーム等、ロボットベースと胴部の間、胴部とアーム間、アーム間等の相対移動が生じる各部材間の関節部には各種のタイプの減速装置が使用されている。このうち、ロボットの各アームや手首を駆動するためのモータや、ロボット手首先端に取り付けるエンドエフェクタの駆動源に電力や油圧や空気圧等のエネルギーを供給するケーブルやホースの通路を確保するために、中空タイプの減速装置が用いられている。且つ、ケーブルやホース等の通路のための貫通孔を回転中心部に設けることから、モータをこの減速装置の軸芯からオフセットして配置した構造のものが一般的に用いられている。
【0003】
図3は、このようなロボットの各関節部に一般的に用いられている偏心揺動型の遊星歯車減速装置の断面図であり、図4はこの偏心揺動型の遊星歯車減速装置の歯車の噛み合い関係の説明図である。
センターギヤ53は、大歯車53aと小歯車53bを有し、モータ51の出力シャフトに直結されているインプットギヤ52は、このセンターギヤ53の大歯車53aと噛み合っている。又、センターギヤ53の小歯車53bには、図4に示すように、等角度間隔に配置された3つのスパーギヤ54が噛み合っている。スパーギヤ54にはクランクシャフト55が結合されている。このクランクシャフト55は、軸受け56により回転部材57に回転自在に取り付けられている。クランクシャフト55の偏心部には外歯歯車58が軸受けを介して揺動回転自在に取り付けられ、ケース59の内側に設けられた内歯歯車60と噛み合うようになっている。なお、回転部材57はケース59に軸受けによって相対的に回転可能に取り付けられている。
【0004】
そこで、モータ51が駆動されインプットギヤ52が回転すると、このインプットギヤ52と噛み合う大歯車53aが駆動されセンターギヤ53が回転し、歯数比分の減速が行われる。このインプットギヤ52とセンターギヤ53の大歯車53aで第1の減速部を構成している。センターギヤ53が回転すると、このギヤ53の小歯車53bと噛み合う3つのスパーギヤ54が回転する。このスパーギヤ54は第2減速部の入力部を構成している。3つのスパーギヤ54が回転すると、各スパーギヤ54にそれぞれ連結されているクランクシャフト55の偏心運動により、外歯歯車58が偏心運動を行う。この外歯歯車58と噛み合うケース59の内側に形成されている内歯歯車60は、外歯歯車58より歯数が1つ多く形成されており、クランクシャフト55が1回転すると外歯歯車58は、クランクシャフト55と反対方向に1歯だけ回転し、ケース59を固定しておれば、クランクシャフト55を介して回転部材57は、上記1歯分だけ回転することになる。スパーギヤ54の回転により最終的に回転部材57を減速回転させる部分が第2の減速部となる。
【0005】
なお、この減速装置は中心部は貫通孔が設けられている。すなわち、回転部材57,スパーギヤ53の中心部には貫通孔がもうけられ、この貫通孔が配線や配管の通路となっている。又そのために、この減速装置に接続されるモータはこの中心部の貫通孔部から外れた偏心した位置に取り付けられるようになっている。
【0006】
【発明が解決しようとする課題】
上述したように、偏心揺動型の遊星歯車減速装置を用いた産業用ロボットの関節構造は、モータに直結されるインプットギヤ52と減速装置のスパーギヤ54間にセンターギヤ53を必要とする。このセンターギヤ53は、インプットギヤ52と噛み合う大歯車53aとスパーギヤ54と噛み合う小歯車53bを必要とし、2段歯車構造となっている。そのため、その形状が複雑になることから製作費が高くなるという欠点がある。又、センターギヤ53を支持するためにベアリングが2個必要となる。このセンターギヤ、2個のベアリングはこの中空減速装置のコストを押し上げる原因となっており、ロボット関節構造の製造コスト低減の課題となっている。
【0007】
【課題を解決するための手段】
そこで、上述した従来技術の課題を解決するために、本発明は、減速装置を介して相対的に回転可能に接続されるアーム等の第1部材と第2部材間のロボットの関節構造において、この減速装置を第1段減速機構と第2段減速機構を備えるものとし、第1段減速機構は、前記モータの出力シャフトに直結したインプットギヤと、該インプットギヤと噛み合う単一のスパーギヤで構成し、第2段減速機構は、前記スパーギヤに直結したクランクシャフトと、該クランクシャフトに係合して偏心揺動させられる外歯歯車と、前記減速装置のケースと、該ケースの内側に設けられ前記外歯歯車に噛み合う内歯歯車と、前記クランクシャフトを回転可能に支持し前記ケースに対して前記内歯歯車の中心軸回りに回転する回転部材とで構成する。そして、前記ケースに前記第1部材が取り付けられ、前記回転部材に前記第2部材が取り付けられ、さらに、前記インプットギヤが前記スパーギヤと噛み合うように前記モータが前記第2部材に取り付けられることによって関節を構成する。
さらに、第2部材の所定の位置にモータを取り付けるための取り付け部を設け、第2部材の軸心と減速装置の出力の軸心とを一致させるために、第2部材の回転部材への取付を嵌め合い構造とし、かつ、取付の際の回転位相を決めるために、位置決めピンを使う構造として、インプットギヤとスパーギヤの噛み合いを確保する。又、第1部材と第2部材の内部を空洞構造とし、且つケースと回転部材それぞれに軸心を含む貫通孔を設けることにより、関節内部に配線及び/又は配管のための空間を確保した。
【0008】
【発明の実施の形態】
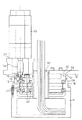
図1は本発明の第1の実施形態のロボット関節構造を示す断面図である。
符号11で示す第1部材と符号12で示す第2部材は、ロボットを構成する部材で、ロボットのベース、旋回胴、アーム等の相対的に回転する部材である。この第1部材と第2部材間には、従来技術で説明した中空の偏心揺動型の遊星歯車減速装置と同様な減速装置が配置されている。ただし、本発明の減速装置は、従来の中空偏心揺動型の遊星歯車減速装置と比べ、センターギヤがない点等において相違する。
【0009】
この第1の実施形態では、第1部材11に減速装置のケース18が固着されている。又、この減速装置を介して第1部材に対して第2部材を相対的に回動させるモータ13は、第2部材12の所定の位置に設けられた取り付け部22に固着されている。第2部材12は、減速装置の回転部材21に取り付けられている。この第2部材12の回転部材21への取り付け部23を嵌め合い構造とすることにより、第2部材12の軸芯と減速装置の出力の軸芯を一致させるようにしている。さらに、第2部材12の回転部材21に対する回転位相を決めるため、位置決めピン24を用いて回転位置が決められ、固定されるようになっている。これにより、後述するインプットギヤ14と減速装置のスパーギヤ15の所定の軸間距離が得られ、該インプットギヤ14とスパーギヤ15が噛み合うように連結される。又、回転部材21は、減速装置のケース18に対して軸受け25で回転自在に軸支されている。
【0010】
モータ13の出力シャフトにはインプットギヤ14が直結されており、このインプットギヤ14は、前述したように減速装置のスパーギヤ15と噛み合い、減速装置の第1段減速機構を構成している。
本発明は、このインプットギヤ14が、直接、減速装置のスパーギヤ15と噛み合う点に特徴を有するもので、図3に示したように従来の偏心揺動型の遊星歯車減速装置では、インプットギヤはセンターギヤの大歯車と噛み合い、センターギヤの小歯車がスパーギヤと噛み合い、モータの動力をインプットギヤからセンターギヤを介してスパーギヤに伝達したが、本発明では、インプットギヤ14から、直接スパーギヤ15に伝達するようにしている。又、従来はスパーギヤ15は3個設けられていたが、本発明では1個のみスパーギヤ15が設けられている。
【0011】
スパーギヤ15にはクランクシャフト16が固定されており、該クランクシャフト16は、軸受け20を介して回転自在に回転部材21に取り付けられている。クランクシャフト16の偏心部には、外歯歯車17が従来の偏心揺動型の遊星歯車減速装置と同様に軸受けを介して揺動回転自在に取り付けられており、クランクシャフト16の回転により該外歯歯車17は偏心揺動する。この構成は、従来のように偏心揺動型の遊星歯車減速装置と同一である。
【0012】
ケース18の内周面には、外歯歯車17と噛み合う内歯歯車19が設けられている。この内歯歯車19は外歯歯車17より歯数が1つだけ多く、クランクシャフト16の1回転により外歯歯車17はクランクシャフト16と反対方向に1歯だけ回転し、回転部材21はクランクシャフト16を介してケース18に対して相対的に回転し、第2部材12を第1部材11に対して相対的に回転させる。このクランクシャフト16,外歯歯車17,内歯歯車19によってこの減速装置の第2段減速機構を構成している。
【0013】
ロボットのアーム等を構成する第1部材11、第2部材12等は空洞構造とし、さらに、この関節機構の減速装置には、その中心部に貫通孔50が設けられ、且つ、モータ13が第2部材12に対して偏心して取り付けていることによって、この貫通孔50を配線/配管のためのケーブルやホース等の通路としている。
【0014】
モータ13が駆動され、インプットギヤ14が回転すると、第1段減速機構であるインプットギヤ14とスパーギヤ15により、モータ13の回転動力は減速してクランクシャフト16に伝達される。クランクシャフト16の回転により、外歯歯車17が偏心揺動し、該外歯歯車17と噛み合うケース18に設けられた内歯歯車19に対して1歯分回転し、回転部材21はケース18に対して回転する。その結果、ケース18が固定されている第1部材11に対して、回転部材21に固定されている第2部材12は回転することになる。
【0015】
第2部材12に固定されたモータ13も、第2部材12及びこれと一体的に回転する回転部材21と共に回転する。一方、クランクシャフト16を介して回転部材21に取り付けられたスパーギヤ15も回転部材21と共に回転するので、モータ13の出力シャフトに直結されたインプットギヤ14とスパーギヤ15の噛み合いは、第2部材12の第1部材に対する相対回転によっても外れることはない。
【0016】
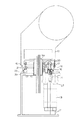
図2は、本発明の第2の実施形態のロボット関節構造を示す断面図である。 この第2の実施形態と前述した第1の実施形態とでは、実質的な差異はない。ロボットのアームや胴等を構成する第1部材、第2部材が一方に対して他方が相対的に回転するものであり、一方をベースとし、他方をこのベースとした部材に対して回転する部材としても良いものである。第1の実施形態では、ベースとなる第1部材に減速装置のケースを固定し、ベースの第1部材に対して回転する第2部材を減速装置の回転部材に固定した例を示している。
【0017】
これに対してこの第2の実施形態は、ベースとしての第1部材に減速装置の回転部材を固定し、このベースとしての第1部材に対して回転する第2の部材を減速装置のケースに固定している。そして、モータは第1の実施形態では第2部材に取り付けたが、この第2実施形態では第1の部材に取り付けている。すなわち、モータは減速装置の回転部材と一体的に回転する部材に取り付けることによって、インプットギヤとスパーギヤの噛み合いを保持するようにしている。
以下、この第2の実施形態を簡単に説明する。なお、各部材に付する符号は、第1の実施形態と同一の符号を用いる。
【0018】
この第2の実施形態において、ベースとして構成されている第1部材11には、モータ取り付け部22が設けられ、該取り付け部22にモータ13が取り付けられる。又、第1部材11には減速装置の回転部材21への嵌め合い構造での取り付け部23が設けられ、且つ、位置決めピン24によって回転方向への位相合わせができるように構成されている。減速装置の回転部材21を第1部材11に取り付けた際、モータ13の出力シャフトに直結されたインプットギヤ14と減速装置のスパーギヤ15との軸間が決められ、このインプットギヤ14とスパーギヤ15が噛み合うように位置決めされる。又、減速装置のケース18には、ベースとしての第1部材11に対して相対回転する第2部材12が固着されている。
【0019】
他の構成は第1の実施形態と同一である。すなわち、スパーギヤ15にはクランクシャフト16が取り付けられ、該クランクシャフト16は回転部材21に軸受け20により回転自在に取り付けられている。クランクシャフト16の偏心部には、外歯歯車17が軸受けを介して揺動回転自在に取り付けられ、ケース18の内側に設けられた内歯歯車19と噛み合う構造となっている。
【0020】
モータ13が駆動され、インプットギヤ14の回転は、スパーギヤ15を介して減速されてクランクシャフト16に伝達され、クランクシャフト16が1回転すると、外歯歯車17は偏心揺動して1歯分だけ内歯歯車19に対して回転し、この回転分、回転部材21はケース18に対して回転する。その結果、回転部材21が第1部材11に固定されているから、ケース18に取り付けられている第2部材12は、第1部材11に対して相対的に回転することになる。
【0021】
以上の通り、本発明においては、モータの出力シャフトに直結したインプットギヤを、直接減速装置のスパーギヤと噛み合わせることによって、従来の減速装置で必要であったセンターギヤをなくした。そのために、スパーギヤが取り付けられた減速装置の回転部材と一体的にモータが回転し、その位置関係を保持するように、回転部材に取り付けるロボットの部材にモータを取り付けて、スパーギヤとインプットギヤの噛み合いが外れることがないようにしている。しかも、回転部材とモータを取り付けるロボットの部材の連結を嵌め合い構造とし、且つ位置決めピン等で回転位相をも決めることにより、スパーギヤとインプットギヤの軸間距離を決め、噛み合いを保証している。
【0022】
【発明の効果】
本発明においては、従来の減速装置を使用した関節構造と比較して、センターギヤを必要としないことから、このセンターギヤを支持するベアリングも必要なく、部品点数が削減される。特にセンターギヤは形状が複雑なことから、その製造コストが高く、このセンターギヤ及びその支持ベアリングを必要としない分、ロボット関節部の駆動系のコストを下げることができる。又、部品点数が削減されることからこの関節駆動系の信頼性を向上させることができ、かつ、駆動系の効率を向上させることができる。さらに、センターギヤを設けない分、ギヤの噛み合い部の箇所がすくなくなり、騒音が減少する。
【図面の簡単な説明】
【図1】本発明の第1実施形態のロボットの関節構造を示す断面図である。
【図2】本発明の第2実施形態のロボットの関節構造を示す断面図である。
【図3】ロボットの関節機構に使用されている従来の偏心揺動型の遊星歯車減速装置の断面図である。
【図4】同、従来の偏心揺動型の遊星歯車減速装置の歯車の噛み合い関係の説明図である。
【符号の説明】
11 第1部材
12 第2部材
13 モータ
14 インプットギヤ
15 スパーギヤ
16 クランクシャフト
17 外歯歯車
18 ケース
19 内歯歯車
20 軸受け
21 回転部材
22 取り付け部
23 取り付け部
24 位置決めピン
Claims (3)
- 減速装置を介して相対的に回転可能に接続されたロボットの第1部材と第2部材、及びこの回転を駆動するモータを備えたロボットの関節構造において、
前記減速装置は第1段減速機構と第2段減速機構を有し、
前記第1減速機構は、前記モータのシャフトに直結したインプットギヤと、該インプットギヤと噛み合う単一のスパーギヤとを備え、
前記第2段減速機構は、前記スパーギヤに直結したクランクシャフトと、該クランクシャフトに係合して偏心揺動させられる外歯歯車と、前記減速装置のケースと、該ケースの内側に設けられ前記外歯歯車に噛み合う内歯歯車と、前記クランクシャフトを回転可能に支持し前記ケースに対して前記内歯歯車の中心軸回りに回転する回転部材とを備え、
前記ケースが前記第1部材に取り付けられ、
前記第2部材が前記回転部材に取り付けられ、
前記インプットギヤが前記スパーギヤと噛み合うように前記モータが前記第2部材に取り付けられることを特徴とするロボットの関節構造。 - 前記第2部材は、所定の位置に前記モータを取り付けるための取り付け部が設けられ、前記第2部材の軸心と前記減速装置の出力の軸心とを一致させるために、前記第2部材の前記回転部材への取付を嵌め合い構造とし、さらに取付の際の回転位相を決めるために、位置決めピンを使う構造を前記第2部材と前記回転部材に設けた請求項1に記載のロボットの関節構造。
- 前記ロボットの第1部材と第2部材の内部を空洞構造とし、且つ前記ケースと前記回転部材それぞれに軸心を含む貫通孔を設けることにより、関節内部に配線及び/又は配管のための空間を確保した、請求項1又は請求項2記載のロボットの関節構造。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2000174696A JP3545995B2 (ja) | 2000-06-12 | 2000-06-12 | ロボットの関節構造 |
| US09/875,916 US20020066331A1 (en) | 2000-06-12 | 2001-06-08 | Joint structure of robot |
| EP01305074A EP1163984A1 (en) | 2000-06-12 | 2001-06-11 | Joint structure for a robot comprising a speed reducer |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2000174696A JP3545995B2 (ja) | 2000-06-12 | 2000-06-12 | ロボットの関節構造 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2001353684A JP2001353684A (ja) | 2001-12-25 |
| JP3545995B2 true JP3545995B2 (ja) | 2004-07-21 |
Family
ID=18676683
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2000174696A Expired - Fee Related JP3545995B2 (ja) | 2000-06-12 | 2000-06-12 | ロボットの関節構造 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20020066331A1 (ja) |
| EP (1) | EP1163984A1 (ja) |
| JP (1) | JP3545995B2 (ja) |
Families Citing this family (35)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003170381A (ja) * | 2001-11-30 | 2003-06-17 | Seiko Epson Corp | 操作装置 |
| DE602004005369T2 (de) * | 2003-02-27 | 2007-07-12 | Fanuc Ltd | Vorrichtung zum Verlegen von Leitungselementen |
| JP4267950B2 (ja) * | 2003-03-28 | 2009-05-27 | 住友重機械工業株式会社 | 内歯揺動型内接噛合遊星歯車装置 |
| DE602006021350D1 (de) | 2005-04-25 | 2011-05-26 | Nabtesco Corp | Exzentrisches oszillierendes Getriebe für die Drehabschnittsstruktur eines Industrieroboters |
| JP2007075913A (ja) * | 2005-09-12 | 2007-03-29 | Nabtesco Corp | 産業用ロボットの旋回部構造 |
| JP4851826B2 (ja) * | 2006-03-29 | 2012-01-11 | 住友重機械工業株式会社 | 内接揺動噛合型遊星歯車減速機 |
| KR100801940B1 (ko) * | 2006-03-29 | 2008-02-12 | 스미도모쥬기가이고교 가부시키가이샤 | 감속기 |
| WO2007129296A1 (en) * | 2006-05-09 | 2007-11-15 | Raviv - Agriculture Cooperative Societies Ltd. | Actuator for an automobile |
| US7974739B2 (en) * | 2006-06-27 | 2011-07-05 | Illinois Tool Works Inc. | System and method having arm with cable passage through joint to infrared lamp |
| WO2008026571A1 (en) * | 2006-09-01 | 2008-03-06 | Nabtesco Corporation | Reduction gear |
| DE102008026702B4 (de) | 2007-06-11 | 2021-04-22 | Sumitomo Heavy Industries, Ltd. | Gelenkantriebsvorrichtung für einen Roboter |
| JP4767979B2 (ja) * | 2008-01-10 | 2011-09-07 | ナブテスコ株式会社 | 偏心揺動型減速機 |
| JP5270462B2 (ja) * | 2009-06-15 | 2013-08-21 | ナブテスコ株式会社 | 偏心揺動型歯車装置および偏心揺動型歯車装置におけるクランク軸の組み付け方法 |
| CN102114634B (zh) * | 2009-12-30 | 2014-03-26 | 鸿富锦精密工业(深圳)有限公司 | 多轴机器人及其采用的轴固定座 |
| CN101758497B (zh) * | 2010-01-05 | 2011-05-11 | 浙江大学 | 冲床上下料机器人 |
| CN102310404A (zh) * | 2010-06-29 | 2012-01-11 | 鸿富锦精密工业(深圳)有限公司 | 机器人 |
| JP5633935B2 (ja) * | 2011-07-22 | 2014-12-03 | 住友重機械工業株式会社 | 揺動内接噛合型遊星歯車装置 |
| JP5447455B2 (ja) * | 2011-08-19 | 2014-03-19 | 株式会社安川電機 | ロボットおよびロボットシステム |
| JP5346105B2 (ja) | 2012-03-27 | 2013-11-20 | ファナック株式会社 | 線条体処理装置 |
| JP5647661B2 (ja) * | 2012-11-20 | 2015-01-07 | 住友重機械工業株式会社 | 揺動内接噛合型遊星歯車装置 |
| JP5466779B2 (ja) * | 2013-05-08 | 2014-04-09 | ナブテスコ株式会社 | 偏心揺動型歯車装置 |
| JP5799072B2 (ja) * | 2013-11-18 | 2015-10-21 | ナブテスコ株式会社 | ロボット |
| CN104308845A (zh) * | 2014-08-18 | 2015-01-28 | 昆山鑫腾顺自动化设备有限公司 | 一种四轴冲压取料机器人 |
| JP6055018B2 (ja) | 2015-04-09 | 2016-12-27 | ファナック株式会社 | モータと減速機とを備えたロボットの関節構造 |
| DE102015011962B4 (de) * | 2015-07-14 | 2017-07-06 | Sew-Eurodrive Gmbh & Co Kg | Getriebe mit Anlaufscheibe zur axialen Sicherung von Wälzkörpern eines Lagers |
| GB201512966D0 (en) * | 2015-07-22 | 2015-09-02 | Cambridge Medical Robotics Ltd | Drive arrangements for robot arms |
| DE102015014087B4 (de) * | 2015-11-03 | 2017-11-09 | Sew-Eurodrive Gmbh & Co Kg | Getriebe |
| CN106828652B (zh) * | 2016-12-30 | 2023-10-10 | 深圳市优必选科技有限公司 | 腰部旋转结构以及机器人 |
| GB2576221B8 (en) | 2018-10-25 | 2023-11-29 | Automata Tech Limited | A drive train |
| CN109236978B (zh) * | 2018-11-06 | 2020-08-07 | 浙江大学 | 一种高分辨率、可调的步进式执行机构 |
| JP7440240B2 (ja) * | 2019-10-23 | 2024-02-28 | ファナック株式会社 | ロボット |
| JP2022071492A (ja) * | 2020-10-28 | 2022-05-16 | Ntn株式会社 | 球面リンク機構及び球面リンク作動装置 |
| WO2022092064A1 (ja) | 2020-10-28 | 2022-05-05 | Ntn株式会社 | 球面リンク機構、球面リンク作動装置、リンク作動装置及び原点位置決め方法 |
| JP7728117B2 (ja) * | 2021-07-30 | 2025-08-22 | Ntn株式会社 | パラレルリンク機構およびリンク作動装置 |
| WO2023062776A1 (ja) * | 2021-10-14 | 2023-04-20 | ヤマハ発動機株式会社 | ロボット |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS604388B2 (ja) * | 1976-10-08 | 1985-02-04 | 株式会社不二越 | 高速回転用減速装置 |
| DE2801138C3 (de) * | 1978-01-12 | 1981-06-19 | Leistritz Maschinenfabrik Paul Leistritz GmbH, 8500 Nürnberg | Verteilergetriebe, insbesondere für Doppelschneckenpresse |
| JPS59175984A (ja) * | 1983-03-22 | 1984-10-05 | フアナツク株式会社 | 工業用ロボツトのハンド交換装置 |
| DE3685478D1 (de) * | 1985-03-18 | 1992-07-02 | Teijin Seiki Co Ltd | Gelenkantrieb fuer industrielle roboter. |
| IT1272083B (it) * | 1993-12-17 | 1997-06-11 | Comau Spa | Robot industriale con gruppi riduttori integrati. |
| JP3659707B2 (ja) * | 1995-08-24 | 2005-06-15 | ナブテスコ株式会社 | ロボット等の旋回部構造 |
| JP3293438B2 (ja) * | 1995-12-28 | 2002-06-17 | 松下電器産業株式会社 | 駆動伝達装置 |
| JP4755357B2 (ja) * | 2001-04-18 | 2011-08-24 | ナブテスコ株式会社 | 減速機 |
-
2000
- 2000-06-12 JP JP2000174696A patent/JP3545995B2/ja not_active Expired - Fee Related
-
2001
- 2001-06-08 US US09/875,916 patent/US20020066331A1/en not_active Abandoned
- 2001-06-11 EP EP01305074A patent/EP1163984A1/en not_active Withdrawn
Also Published As
| Publication number | Publication date |
|---|---|
| EP1163984A1 (en) | 2001-12-19 |
| JP2001353684A (ja) | 2001-12-25 |
| US20020066331A1 (en) | 2002-06-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3545995B2 (ja) | ロボットの関節構造 | |
| KR101258241B1 (ko) | 중공 감속기 | |
| JP2020138319A (ja) | ロボットの手首構造およびロボット | |
| JP4232795B2 (ja) | 平行リンク機構及び産業用ロボット | |
| JP5375778B2 (ja) | ロボットおよび2台以上のロボットの組み立て方法 | |
| TW200932454A (en) | Robot joint drive system | |
| JP2004216535A (ja) | 多関節ロボット | |
| KR20060103119A (ko) | 로봇 손목 구동용 동력전달장치 및 동력전달장치 | |
| JP2006167863A (ja) | リンク駆動機構およびこれを用いた産業用ロボット | |
| JPH01150042A (ja) | マニピュレータ関節機構 | |
| WO1997037817A1 (fr) | Mecanisme de poignet pour robot industriel | |
| JPH0659635B2 (ja) | ロボツト手首 | |
| WO2006115257A1 (ja) | 産業用ロボットの旋回部構造 | |
| JP2021084207A (ja) | ロボットアームの駆動ユニット | |
| JP4737695B2 (ja) | 指関節機構 | |
| JP2563266Y2 (ja) | 偏心差動方式減速機 | |
| US10537992B2 (en) | Speed reducer | |
| JPH03287392A (ja) | 多関節ロボット | |
| JP2001310287A (ja) | ロボット用アーム装置 | |
| JPWO2008136405A1 (ja) | 回転駆動装置、ロボットの関節構造及びロボットアーム | |
| JP2000161449A (ja) | 減速装置及びこれを用いたコンクリートミキサー車のドラム駆動装置 | |
| CN213892711U (zh) | 腿部结构及仿人机器人 | |
| JP4575627B2 (ja) | ワーク搬送用ロボット | |
| CN119589721A (zh) | 机械臂关节、机械臂及机器人 | |
| JPH08141968A (ja) | 工業用ロボットの手首機構 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20040323 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20040409 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20080416 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090416 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100416 Year of fee payment: 6 |
|
| LAPS | Cancellation because of no payment of annual fees |