JP2023020249A - 磁気センサ - Google Patents
磁気センサ Download PDFInfo
- Publication number
- JP2023020249A JP2023020249A JP2021125510A JP2021125510A JP2023020249A JP 2023020249 A JP2023020249 A JP 2023020249A JP 2021125510 A JP2021125510 A JP 2021125510A JP 2021125510 A JP2021125510 A JP 2021125510A JP 2023020249 A JP2023020249 A JP 2023020249A
- Authority
- JP
- Japan
- Prior art keywords
- magnetic
- sensor chip
- external magnetic
- sensor
- magneto
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/02—Measuring direction or magnitude of magnetic fields or magnetic flux
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/02—Measuring direction or magnitude of magnetic fields or magnetic flux
- G01R33/06—Measuring direction or magnitude of magnetic fields or magnetic flux using galvano-magnetic devices
- G01R33/09—Magnetoresistive devices
Landscapes
- Physics & Mathematics (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- General Physics & Mathematics (AREA)
- Measuring Magnetic Variables (AREA)
Abstract

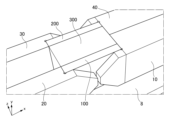
【解決手段】磁気センサ1は、センサチップ100とx方向を長手方向とする外部磁性体10,20とを備える。センサチップ100の素子形成面105上には、磁気ギャップG2を介してx方向に配列された磁性体層111,112と、x方向を感磁方向とする感磁素子R1とが形成される。外部磁性体10は、磁性体層111と重なるよう素子形成面105を覆う内面12aと側面101を覆う内面11aを有し、外部磁性体20は、磁性体層112と重なるよう素子形成面105を覆う内面22aと側面102を覆う内面21aを有する。これにより、外部磁性体10,20をセンサチップ100の側面101,102によって位置決めできることから、検出感度のばらつきが生じにくい。
【選択図】図9
Description
8 基板
10,20,30,40 外部磁性体
11,21,31,41 本体部
12,22,32,42 突出部
11a,12a,21a,22a,31a,32a,41a,42a 内面
13,23 溝
100,200 センサチップ
101~104,201~204 側面
105,205 素子形成面
106,206 裏面
107 絶縁層
111,112,211,212 磁性体層
120 補助基板
300 スペーサー
G1,G2 磁気ギャップ
L1,L2 配線
R1,R2 感磁素子
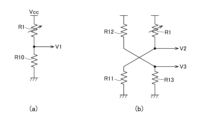
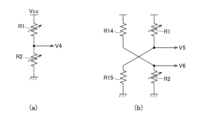
R10~R15 固定抵抗
T11~T14 端子電極
Claims (9)
- 第1の方向及び前記第1の方向に対して垂直な第2の方向に延在する素子形成面と、前記第1の方向に対して垂直であり互いに平行な第1及び第2の側面とを有する第1のセンサチップと、
前記第1の方向を長手方向とする第1及び第2の外部磁性体と、を備え、
前記素子形成面上には、第1の磁気ギャップを介して前記第1の方向に配列された第1及び第2の磁性体層と、前記第1の磁気ギャップによって形成される磁路上に配置され、前記第1の方向を感磁方向とする第1の感磁素子とが形成され、
前記第1の外部磁性体は、前記第1の磁性体層と重なるよう前記素子形成面を覆う第1の内面と、前記第1の側面を覆う第2の内面を有し、
前記第2の外部磁性体は、前記第2の磁性体層と重なるよう前記素子形成面を覆う第3の内面と、前記第2の側面を覆う第4の内面を有することを特徴とする磁気センサ。 - 前記第1の外部磁性体の前記第1の内面及び前記第2の外部磁性体の前記第3の内面は、前記第1の磁気ギャップに近づくにつれて前記第2の方向における幅が狭くなる形状を有していることを特徴とする請求項1に記載の磁気センサ。
- 前記第1の外部磁性体は、前記第1の内面と前記第2の内面が突き当たる角部が除去された構造を有し、
前記第2の外部磁性体は、前記第3の内面と前記第4の内面が突き当たる角部が除去された構造を有していることを特徴とする請求項1又は2に記載の磁気センサ。 - 前記第1のセンサチップ、前記第1の外部磁性体及び前記第2の外部磁性体が搭載された基板をさらに備え、
前記第1のセンサチップは、前記第2の方向に対して垂直な第3の側面が前記基板と向かい合うよう搭載されていることを特徴とする請求項1乃至3のいずれか一項に記載の磁気センサ。 - 前記基板に搭載され、前記第1のセンサチップの前記素子形成面の反対側に位置する裏面に配置された補助基板をさらに備えることを特徴とする請求項4に記載の磁気センサ。
- 前記第1及び第2の方向に延在する素子形成面と、前記第1の方向に対して垂直であり互いに平行な第4及び第5の側面とを有する第2のセンサチップと、
前記第1の方向を長手方向とする第3及び第4の外部磁性体と、をさらに備え、
前記第2のセンサチップの前記素子形成面上には、第2の磁気ギャップを介して前記第1の方向に配列された第3及び第4の磁性体層と、前記第2の磁気ギャップによって形成される磁路上に配置され、前記第1の方向を感磁方向とする第2の感磁素子とが形成され、
前記第3の外部磁性体は、前記第3の磁性体層と重なるよう前記素子形成面を覆う第5の内面と、前記第4の側面を覆う第6の内面を有し、
前記第4の外部磁性体は、前記第4の磁性体層と重なるよう前記素子形成面を覆う第7の内面と、前記第5の側面を覆う第8の内面を有し、
前記第1の感磁素子と前記第2の感磁素子の感度軸方向は、互いに180°異なっていることを特徴とする請求項1乃至4のいずれか一項に記載の磁気センサ。 - 前記第1のセンサチップと前記第2のセンサチップは、前記素子形成面の反対側に位置する裏面同士が向かい合うよう配置されることを特徴とする請求項6に記載の磁気センサ。
- 前記第1のセンサチップの前記裏面及び前記第2のセンサチップの前記裏面と接するスペーサーをさらに備えることを特徴とする請求項7に記載の磁気センサ。
- 前記第1のセンサチップの前記裏面と前記第2のセンサチップの前記裏面が互いに接することを特徴とする請求項7に記載の磁気センサ。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021125510A JP7638819B2 (ja) | 2021-07-30 | 2021-07-30 | 磁気センサ |
| PCT/JP2022/024685 WO2023007989A1 (ja) | 2021-07-30 | 2022-06-21 | 磁気センサ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021125510A JP7638819B2 (ja) | 2021-07-30 | 2021-07-30 | 磁気センサ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2023020249A true JP2023020249A (ja) | 2023-02-09 |
| JP7638819B2 JP7638819B2 (ja) | 2025-03-04 |
Family
ID=85086604
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021125510A Active JP7638819B2 (ja) | 2021-07-30 | 2021-07-30 | 磁気センサ |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP7638819B2 (ja) |
| WO (1) | WO2023007989A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN119247219A (zh) * | 2024-08-30 | 2025-01-03 | 北京智芯微电子科技有限公司 | 磁传感芯片灵敏度温漂测试装置及测试方法 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20100271018A1 (en) * | 2009-04-24 | 2010-10-28 | Seagate Technology Llc | Sensors for minute magnetic fields |
| JP2016164549A (ja) * | 2015-02-26 | 2016-09-08 | エスアイアイ・セミコンダクタ株式会社 | 磁気センサおよびその製造方法 |
| WO2018216651A1 (ja) * | 2017-05-23 | 2018-11-29 | Tdk株式会社 | 磁気センサ |
| JP2019215311A (ja) * | 2018-06-07 | 2019-12-19 | Tdk株式会社 | 磁気センサ |
| JP2020187084A (ja) * | 2019-05-17 | 2020-11-19 | Tdk株式会社 | 磁気センサ |
| JP2021105601A (ja) * | 2019-12-27 | 2021-07-26 | Tdk株式会社 | 磁気センサ |
-
2021
- 2021-07-30 JP JP2021125510A patent/JP7638819B2/ja active Active
-
2022
- 2022-06-21 WO PCT/JP2022/024685 patent/WO2023007989A1/ja not_active Ceased
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20100271018A1 (en) * | 2009-04-24 | 2010-10-28 | Seagate Technology Llc | Sensors for minute magnetic fields |
| JP2016164549A (ja) * | 2015-02-26 | 2016-09-08 | エスアイアイ・セミコンダクタ株式会社 | 磁気センサおよびその製造方法 |
| WO2018216651A1 (ja) * | 2017-05-23 | 2018-11-29 | Tdk株式会社 | 磁気センサ |
| JP2019215311A (ja) * | 2018-06-07 | 2019-12-19 | Tdk株式会社 | 磁気センサ |
| JP2020187084A (ja) * | 2019-05-17 | 2020-11-19 | Tdk株式会社 | 磁気センサ |
| JP2021105601A (ja) * | 2019-12-27 | 2021-07-26 | Tdk株式会社 | 磁気センサ |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN119247219A (zh) * | 2024-08-30 | 2025-01-03 | 北京智芯微电子科技有限公司 | 磁传感芯片灵敏度温漂测试装置及测试方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2023007989A1 (ja) | 2023-02-02 |
| JP7638819B2 (ja) | 2025-03-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5012939B2 (ja) | 電流センサ | |
| JP6822127B2 (ja) | 磁気センサ | |
| CN107430155A (zh) | 电流传感器 | |
| JP2009002911A (ja) | 電流センサおよびその製造方法 | |
| CN110709720B (zh) | 磁传感器 | |
| JP2006125962A (ja) | 電流センサ | |
| CN120044455A (zh) | 磁传感器 | |
| CN111198341B (zh) | 磁传感器及位置检测装置 | |
| JP7070532B2 (ja) | 磁気センサ | |
| JP7095350B2 (ja) | 磁気センサ | |
| CN113474670A (zh) | 磁传感器及其制造方法 | |
| WO2019167598A1 (ja) | 磁気センサ | |
| JP2019144116A (ja) | 磁気センサ | |
| WO2023007989A1 (ja) | 磁気センサ | |
| WO2023145063A1 (ja) | 磁気センサ | |
| JP7628832B2 (ja) | 磁気センサ | |
| JP2023060610A (ja) | 磁気センサ | |
| JP2022143682A (ja) | 磁気センサ | |
| JP7521981B2 (ja) | 磁気センサ | |
| CN108780130B (zh) | 磁传感器 | |
| US12174270B2 (en) | Magnetic sensor | |
| WO2011111747A1 (ja) | 磁気検出素子を備えた電流センサ | |
| JP2013047610A (ja) | 磁気平衡式電流センサ | |
| JP7832340B2 (ja) | 磁気センサ | |
| CN116075735B (zh) | 磁传感器及其制造方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220602 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20220602 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20240516 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20250212 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20250219 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7638819 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |