JP2022114764A - 光学系、撮像装置、車載システムおよび移動装置 - Google Patents
光学系、撮像装置、車載システムおよび移動装置 Download PDFInfo
- Publication number
- JP2022114764A JP2022114764A JP2021011187A JP2021011187A JP2022114764A JP 2022114764 A JP2022114764 A JP 2022114764A JP 2021011187 A JP2021011187 A JP 2021011187A JP 2021011187 A JP2021011187 A JP 2021011187A JP 2022114764 A JP2022114764 A JP 2022114764A
- Authority
- JP
- Japan
- Prior art keywords
- optical system
- lens
- conjugate side
- vehicle
- θmax
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 230000003287 optical effect Effects 0.000 title claims abstract description 114
- 238000003384 imaging method Methods 0.000 claims description 32
- 230000014509 gene expression Effects 0.000 description 21
- 238000010586 diagram Methods 0.000 description 19
- 230000004075 alteration Effects 0.000 description 11
- 238000000034 method Methods 0.000 description 9
- 230000000694 effects Effects 0.000 description 8
- 238000006073 displacement reaction Methods 0.000 description 4
- 230000002093 peripheral effect Effects 0.000 description 4
- 239000011521 glass Substances 0.000 description 3
- 238000006243 chemical reaction Methods 0.000 description 2
- 238000001514 detection method Methods 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 201000009310 astigmatism Diseases 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 238000007689 inspection Methods 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 230000000116 mitigating effect Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 210000001747 pupil Anatomy 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R1/00—Optical viewing arrangements; Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles
- B60R1/20—Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles
- B60R1/22—Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles for viewing an area outside the vehicle, e.g. the exterior of the vehicle
- B60R1/23—Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles for viewing an area outside the vehicle, e.g. the exterior of the vehicle with a predetermined field of view
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B13/00—Optical objectives specially designed for the purposes specified below
- G02B13/001—Miniaturised objectives for electronic devices, e.g. portable telephones, webcams, PDAs, small digital cameras
- G02B13/0015—Miniaturised objectives for electronic devices, e.g. portable telephones, webcams, PDAs, small digital cameras characterised by the lens design
- G02B13/002—Miniaturised objectives for electronic devices, e.g. portable telephones, webcams, PDAs, small digital cameras characterised by the lens design having at least one aspherical surface
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B15/00—Optical objectives with means for varying the magnification
- G02B15/14—Optical objectives with means for varying the magnification by axial movement of one or more lenses or groups of lenses relative to the image plane for continuously varying the equivalent focal length of the objective
- G02B15/142—Optical objectives with means for varying the magnification by axial movement of one or more lenses or groups of lenses relative to the image plane for continuously varying the equivalent focal length of the objective having two groups only
- G02B15/1421—Optical objectives with means for varying the magnification by axial movement of one or more lenses or groups of lenses relative to the image plane for continuously varying the equivalent focal length of the objective having two groups only the first group being positive
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B13/00—Optical objectives specially designed for the purposes specified below
- G02B13/001—Miniaturised objectives for electronic devices, e.g. portable telephones, webcams, PDAs, small digital cameras
- G02B13/0015—Miniaturised objectives for electronic devices, e.g. portable telephones, webcams, PDAs, small digital cameras characterised by the lens design
- G02B13/002—Miniaturised objectives for electronic devices, e.g. portable telephones, webcams, PDAs, small digital cameras characterised by the lens design having at least one aspherical surface
- G02B13/0045—Miniaturised objectives for electronic devices, e.g. portable telephones, webcams, PDAs, small digital cameras characterised by the lens design having at least one aspherical surface having five or more lenses
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B13/00—Optical objectives specially designed for the purposes specified below
- G02B13/06—Panoramic objectives; So-called "sky lenses" including panoramic objectives having reflecting surfaces
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B3/00—Simple or compound lenses
- G02B3/02—Simple or compound lenses with non-spherical faces
- G02B3/04—Simple or compound lenses with non-spherical faces with continuous faces that are rotationally symmetrical but deviate from a true sphere, e.g. so called "aspheric" lenses
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B9/00—Optical objectives characterised both by the number of the components and their arrangements according to their sign, i.e. + or -
- G02B9/64—Optical objectives characterised both by the number of the components and their arrangements according to their sign, i.e. + or - having more than six components
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2300/00—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle
- B60R2300/30—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the type of image processing
- B60R2300/301—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the type of image processing combining image information with other obstacle sensor information, e.g. using RADAR/LIDAR/SONAR sensors for estimating risk of collision
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/143—Alarm means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/146—Display means
Abstract
【課題】十分な画角と解像度を有し、魚眼レンズと望遠レンズを両立する射影特性を備えた光学系を提供する。【解決手段】光学系は、拡大共役側から縮小共役側へ順に配置された、3つ以上のレンズを含む前群と、開口絞りSTと、複数のレンズを含む後群からなる。最も拡大共役側のレンズL1は正レンズである。画角θと像面での像高yとの関係を表す光学系の射影特性y(θ)が、光学系の最大半画角をθmax、光学系の焦点距離をfとするとき、1.80≦fsinθmax/y(θmax)≦4.50なる条件を満足する。【選択図】図1
Description
本発明は、車載カメラ等の撮像装置に好適な光学系に関する。
車載カメラは、車両の周辺の画像データを取得して他車両や障害物等の視認に利用されている。このような車載カメラでは、解像度は低くても広い視野を実現する魚眼レンズや、画角は狭いが遠方を拡大して高い解像度を実現する望遠レンズ等の複数種類の光学系を備えることが多い。これに対して、特許文献1、2には、魚眼レンズと望遠レンズの両方の特性を含む射影特性を有する光学系が開示されている。
しかしながら、特許文献1の光学系では、画角が小さいうえに、前群が2つのレンズで構成されており、十分な射影特性と高画質を実現できていない。また特許文献2の光学系では、画角が小さいうえに、レンズ構成が魚眼レンズと望遠レンズを両立する射影特性を実現するには最適ではない。
本発明は、十分な画角と解像度を有し、魚眼レンズと望遠レンズを両立する射影特性を備えた光学系を提供する。
本発明の一側面としての光学系は、拡大共役側から縮小共役側へ順に配置された、3つ以上のレンズを含む前群と、開口絞りと、複数のレンズを含む後群からなる光学系である。最も拡大共役側のレンズは正レンズである。画角θと像高yとの関係を表す光学系の射影特性y(θ)が、光学系の最大半画角をθmax、光学系の焦点距離をfとするとき、
1.80≦fsinθmax/y(θmax)≦4.50
なる条件を満足することを特徴とする。なお、上記光学系を用いた撮像装置や、該撮像装置を用いた車載システムや移動装置も、本発明の他の一側面を構成する。
1.80≦fsinθmax/y(θmax)≦4.50
なる条件を満足することを特徴とする。なお、上記光学系を用いた撮像装置や、該撮像装置を用いた車載システムや移動装置も、本発明の他の一側面を構成する。
本発明によれば、十分な画角と解像度を有し、魚眼レンズと望遠レンズを両立する射影特性を備えた光学系を実現することができる。
以下、本発明の実施例について図面を参照しながら説明する。実施例1~3の具体的な説明に先立って、各実施例に共通する事項について説明する。
各実施例の光学系は、デジタルスチルカメラ、デジタルビデオカメラ、車載カメラ、携帯電話用カメラ、監視カメラ、ウェアラブルカメラ、医療用カメラ等の撮像装置に好適なものである。
図1、図5および図9はそれぞれ、実施例1、2および3の光学系の光軸(一点鎖線)を含む断面を示している。各図は、光学系の撮像距離∞の状態を示している。
各図において、左側が拡大共役側であり、右側が縮小共役側である。各実施例の光学系は、拡大共役側に位置する不図示の物体からの光束を集光させて縮小共役側の像面(11,21,31)に物体像を形成する結像(撮像)光学系である。像面には、CCDセンサやCMOSセンサ等の撮像素子の撮像面(受光面)が配置される。ただし、各実施例の光学系は、縮小共役側に配置された液晶パネル等の空間光変調素子からの光束を拡大共役側に配置されたスクリーン等の被投射面に投射するプロジェクタの投射光学系として使用することもできる。以下の説明では、光学系が、車載カメラの撮像光学系として用いられる場合について説明する。
各実施例の光学系は、拡大共役側から縮小共役側へ順に配置された、3つ以上のレンズを含む前群と、開口絞り(ST1,ST2,ST3)と、複数のレンズを含む後群とにより構成されている。前群のうち最も拡大共役側のレンズ(L1,L21,L31)は正の屈折力のレンズ(正レンズ)である。各実施例の光学系は、単一の光学系でありながら、十分な画角と周辺解像度を有しつつ、中心解像度も十分確保し、画角全体にわたって良好な光学性能を得るのに適切なレンズ構成を有する。なお、各実施例の光学系は、前群は少なくとも一つの負の屈折力のレンズ(負レンズ)を含み、前群のうち最も縮小共役側のレンズを正レンズとしている。
以下の説明において、画角1degあたりの単位長を解像度(mm/deg)と定義し、画角θに対する像高yの関係を射影特性y(θ)と定義する。例えば一般的なfθレンズは、各像高での解像度は一定であり、比例関係の射影特性を有する。また、光軸と最軸外主光線とがなす角度を最大半画角と定義する。
各実施例の光学系は、車載カメラにおいて、光軸近傍の第1の領域(中心領域)が前遠方監視用に使用され、第1の領域よりも軸外側(周辺側)の第2の領域(周辺領域)がフロントビュー用に使用される。この場合、第1の領域に対応する画角内では望遠機能を有することで高解像を実現し、第2の領域では魚眼機能により十分な画角を得るとともに画角全体にわたって良好な光学性能を実現する。
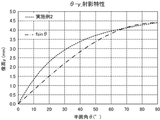
図3、図7および図11はそれぞれ、実施例1、2および3の光学系の射影特性y(θ)(図では「θ-y_射影特性」と記している)を示している。各実施例の射影特性は、y=fsinθで定義される正射影方式と同様に90°と十分な画角を有する一方、正射影方式に比べて第1の領域での像高が高い。また、図4、図8および図12はそれぞれ、実施例1、2および3の光学系の画角θごとの解像度を表す解像度特性を示している。各実施例の解像度特性は、y=fθで定義される等距離射影方式に比べて、第1の領域での解像度が高く、第2の領域での解像度は低い。
各実施例ではこのような射影特性および解像度特性を実現するために、上述したように開口絞りよりも拡大共役側の前群を3つ以上のレンズで構成し、前群(光学系)のうち最も拡大共役側のレンズの屈折力を正としている。さらに、拡大共役側から2番目のレンズ(L2,L22,L32)の屈折力を負として、テレフォトタイプのレンズ構成としている。加えて、光学系全系の焦点距離を長く設定している。これらによって、コンパクトでありながら望遠効果を持たせて、第1の領域の解像度を増加させている。
具体的には、各実施例の光学系は、画角θと像面での像高yとの関係を表す射影特性をy(θ)、光学系の焦点距離(mm)をf、光学系の最大半画角(°)をθmaxとするとき、以下の条件式(1)を満足する。
1.80≦fsinθmax/y(θmax)≦4.50 (1)
fsinθmax/y(θmax)が条件式(1)の下限を下回ると、望遠効果が弱くなりすぎて第1の領域で十分な解像度を得ることができないため、好ましくない。また、fsinθmax/y(θmax)が条件式(1)の上限を上回ると、望遠効果が強くなりすぎて良好な解像性能を実現することができないため、好ましくない。
1.80≦fsinθmax/y(θmax)≦4.50 (1)
fsinθmax/y(θmax)が条件式(1)の下限を下回ると、望遠効果が弱くなりすぎて第1の領域で十分な解像度を得ることができないため、好ましくない。また、fsinθmax/y(θmax)が条件式(1)の上限を上回ると、望遠効果が強くなりすぎて良好な解像性能を実現することができないため、好ましくない。
より良好な光学性能を得るために、以下の条件式(1)′を満足することが好ましい。
1.85≦fsinθmax/y(θmax)≦3.50 (1)′
さらに良好な光学性能を得るために、以下の条件式(1)″を満足することが好ましい。
1.90≦fsinθmax/y(θmax)≦3.00 (1)″
以上の条件を満足することで、単一の光学系でありながら、十分な画角と周辺解像度、さらには高い中心解像度を有し、画角全体にわたって良好な光学性能を有する光学系を得ることができる。
1.85≦fsinθmax/y(θmax)≦3.50 (1)′
さらに良好な光学性能を得るために、以下の条件式(1)″を満足することが好ましい。
1.90≦fsinθmax/y(θmax)≦3.00 (1)″
以上の条件を満足することで、単一の光学系でありながら、十分な画角と周辺解像度、さらには高い中心解像度を有し、画角全体にわたって良好な光学性能を有する光学系を得ることができる。
各実施例の光学系は、十分な望遠性能を得るために、前述したように前群のうち最も拡大共役側のレンズL1の焦点距離f1が正であり、拡大共役側から2番目のレンズL2の焦点距離f2が負であるテレフォトタイプのレンズ構成としている。そしてこれらの焦点距離は、以下の条件式(2)を満足することが望ましい。
0.1≦|f2/f1|≦1.5 (2)
|f2/f1|が条件式(2)の下限を下回ると、正の屈折力が相対的に弱くなりすぎて望遠化が難しくなるため、好ましくない。|f2/f1|が条件式(2)の上限を上回ると、正の屈折力が相対的に強くなりすぎて像面湾曲が大きくアンダーになり、良好な画質が得られなくなるため、好ましくない。
0.1≦|f2/f1|≦1.5 (2)
|f2/f1|が条件式(2)の下限を下回ると、正の屈折力が相対的に弱くなりすぎて望遠化が難しくなるため、好ましくない。|f2/f1|が条件式(2)の上限を上回ると、正の屈折力が相対的に強くなりすぎて像面湾曲が大きくアンダーになり、良好な画質が得られなくなるため、好ましくない。
より十分な望遠性能を得るために、以下の条件式(2)′を満足することが好ましい。
0.2≦|f2/f1|≦1.4 (2)′
さらに十分な望遠性能を得るために、以下の条件式(2)″を満足することが好ましい。
0.3≦|f2/f1|≦1.3 (2)″
また、等距離射影fθの解像度がy(θmax)/θmaxと等しくなる半画角をθbとするとき、以下の条件式(3)を満足することにより前述した射影特性を実現しつつ、より良好な光学性能を実現することができる
0.20≦θb/θmax≦0.45 (3)
条件式(3)は、各実施例の光学系の解像度が等距離射影方式fθの解像度と交わる画角θ(半画角θb)に関する条件を示している。図4、図8および図12に示すように、各実施例の光学系では、射影特性を示す曲線(実線)がfθの直線(破線)と最大半画角θmax=90°に対して半画角θb=20°~35°の範囲で交わっている。θb以下の画角(第1の領域)ではfθより高解像度が得られ、一方、θmax=90°近傍の周辺解像度もfθより低いものの十分に確保することができている。
0.2≦|f2/f1|≦1.4 (2)′
さらに十分な望遠性能を得るために、以下の条件式(2)″を満足することが好ましい。
0.3≦|f2/f1|≦1.3 (2)″
また、等距離射影fθの解像度がy(θmax)/θmaxと等しくなる半画角をθbとするとき、以下の条件式(3)を満足することにより前述した射影特性を実現しつつ、より良好な光学性能を実現することができる
0.20≦θb/θmax≦0.45 (3)
条件式(3)は、各実施例の光学系の解像度が等距離射影方式fθの解像度と交わる画角θ(半画角θb)に関する条件を示している。図4、図8および図12に示すように、各実施例の光学系では、射影特性を示す曲線(実線)がfθの直線(破線)と最大半画角θmax=90°に対して半画角θb=20°~35°の範囲で交わっている。θb以下の画角(第1の領域)ではfθより高解像度が得られ、一方、θmax=90°近傍の周辺解像度もfθより低いものの十分に確保することができている。
θb/θmaxが条件式(3)の下限を下回ると、各図における交点の画角がさらに小さくなり、望遠効果が強くなりすぎて良好な解像性能を実現することができないため、好ましくない。逆にθb/θmaxが条件式(3)の上限を上回ると、望遠効果が弱くなりすぎて第1の領域で十分な解像度を実現することができないため、好ましくない。
より良好な光学性能を得るためには、以下の条件式(3)′を満足することが好ましい。
0.25≦θb/θmax≦0.42 (3)′
さらに良好な光学性能を得るためには、以下の条件式(3)″を満足することが好ましい。
0.30≦θb/θmax≦0.38 (3)′
さらに、各実施例の光学系では、上述した射影特性を実現しつつ良好な光学特性を得るために、歪曲収差と像面湾曲を良好に補正するレンズ構成としている。具体的には、軸外光線が高い位置に入射するレンズ(L1、L2、L8、L21、L27、L31、L37)における拡大共役側および縮小共役側のうち少なくとも一方の面を非球面とすることで、効果的に歪曲収差と像面湾曲を補正している。さらには、拡大共役側のレンズで主に射影特性を実現し、それ以降のレンズで像面湾曲を補正している。
さらに良好な光学性能を得るためには、以下の条件式(3)″を満足することが好ましい。
0.30≦θb/θmax≦0.38 (3)′
さらに、各実施例の光学系では、上述した射影特性を実現しつつ良好な光学特性を得るために、歪曲収差と像面湾曲を良好に補正するレンズ構成としている。具体的には、軸外光線が高い位置に入射するレンズ(L1、L2、L8、L21、L27、L31、L37)における拡大共役側および縮小共役側のうち少なくとも一方の面を非球面とすることで、効果的に歪曲収差と像面湾曲を補正している。さらには、拡大共役側のレンズで主に射影特性を実現し、それ以降のレンズで像面湾曲を補正している。
加えて、各実施例の光学系では、上述した射影特性を実現するために、非球面を変曲点を有する形状としている。変曲点とは、曲率Cの符号が切り替わる点(光軸を中心とする円)である。図13(a)~(d)は、実施例1の光学系の各非球面の光軸からの径方向高さy(縦軸)と曲率C(横軸)との関係を表す曲率(y-C)特性を示す。図13(a)はレンズL1の拡大共役側の第1面の、(b)はレンズL1の縮小共役側の第2面の、(c)はレンズL7の拡大共役側の第14面の、(d)はレンズL7の縮小共役側の第15面のy-C特性をそれぞれ示している。
図13(a)から分かるように、実施例1の光学系のレンズL1の拡大共役側の非球面が変曲点を有している。このようにレンズL1の拡大共役側の非球面に変曲点を持たせることで、第1の領域と第2の領域とで解像度を大きく変化させ、上述した射影特性を実現している。
さらに、広画角化と上述した射影特性を両立するためには、拡大共役側の任意の非球面を、同一面内に複数の変曲点を有する形状とすることが好ましい。図13(a)に示したレンズL1の拡大共役側の非球面の曲率Cは、光軸近傍から軸外側(径方向外側)に向かって像高yが変化するにつれて、まず曲率Cは正から6.3mm付近の変曲点で負に変化し、さらに軸外側の9.5mm付近の変曲点で正になる。すなわち、レンズL1の拡大共役側の非球面は2つの変曲点を有する。この非球面形状は以下の理由で形成されている。まず、光軸近傍では望遠効果を持たせるために非球面形状を拡大共役側に凸の形状とし、軸外に向かって徐々に解像度を低下させるために拡大共役側に凹の形状へと非球面形状を変化させている。さらに周辺付近の解像度を確保するために、再度、拡大共役側に凸の形状へと非球面形状を変化させている。
また、図13(c)に示すように、実施例1において後群のうち最も縮小共役側に配置された、軸外主光線の入射高さが高いレンズL7により、効果的に像面湾曲を補正している。なお、レンズL7は、拡大共役側および縮小共役側のうち少なくとも一方の面が非球面であればよい。さらにレンズL7の非球面が変曲点を有してもよい。
また、広画角になるほど上述した射影特性が効果的であるため、以下の条件式(4)を満足することが好ましい。
θmax≧50° (4)
より好ましくは、
θmax≧55° (4)′
さらに好ましくは、
θmax≧60° (4)″
を満足するとよい。
θmax≧50° (4)
より好ましくは、
θmax≧55° (4)′
さらに好ましくは、
θmax≧60° (4)″
を満足するとよい。
さらに、上述した射影特性と広画角、高画質を実現するために、以下のレンズ構成(屈折力配置)とすることが好ましい。すなわち、前群を、拡大共役側から縮小共役側へ順に配置された、正の屈折力の第1レンズ(正レンズ)と、負の屈折力の第2レンズ(負レンズ)と、正または負の屈折力の第3レンズ(正または負レンズ)と、正の屈折力の第4レンズ(正レンズ)により構成する。また、後群を、拡大共役側から縮小共役側へ順に配置された、正の屈折力の第5レンズ(正レンズ)と、負の屈折力の第6レンズ(負レンズ)と、正の屈折力の第7レンズ(正レンズ)により構成する。
なお、以上の説明は本発明の実施例として最小限の必要な構成のものであり、実施例の構成が上記説明の内容に限定されるものではない。例えば、開口絞りの位置とは、軸外主光線が光軸と交わる位置近傍を表しており、物理的な開口絞りに限定されない。また、射影特性や変曲点の位置と数等も上記説明のものに限定されない。
以下、実施例1~3の光学系について具体的に説明する。
図1に示す実施例1の光学系は、拡大共役側から縮小共役側へ順に配置された、正の屈折力の第1レンズL1、負の屈折力の第2レンズL2、負の屈折力の第3レンズL3および正の屈折力の第4レンズL4を含む前群と、開口絞りST1と、正の屈折力の第5レンズL5、負の屈折力の第6レンズL6および正の屈折力の第7レンズL7を含む後群とにより構成されている。図1において、P1、P2はフィルター等のガラス平板である。
表1には、本実施例の具体的な数値例を示している。数値例において、riは物体側からi番目の面の曲率半径(mm)、diはi番目と(i+1)番目の面間のレンズ厚または空気間隔(mm)、niは第i面と第i+1面間の光学材料のd線における屈折率である。νiは第i面と第i+1面間の光学材料のd線を基準としたアッベ数である。
アッベ数νdは、フラウンホーファ線のd線(587.6nm)、F線(486.1nm)、C線(656.3nm)における屈折率をNd、NF、NCとするとき、
νd=(Nd-1)/(NF-NC)で表される。
νd=(Nd-1)/(NF-NC)で表される。
STは開口絞りの位置である。面番号に付された「*」は、その面が非球面であることを意味する。非球面の形状は、yを径方向での座標、zを光軸方向での座標、Kを円錐定数、光の進行方向を正とし、Rを近軸曲率半径、A,B,C,D,E,Fを非球面係数とするとき、以下の式で表される。
z(y)=(y2/Ri)/[1+{1-(1+k)(y2/Ri2)}1/2]
+Ay4+By6+Cy8+Dy10+Ey12+Fy14
また、数値例における条件式(1)~(4)に対応する値を表中の(C)にまとめて示す。さらに参考値として、y(θmax)の値も示している。以上の数値例の説明は、他の実施例の数値例についても同じである。
z(y)=(y2/Ri)/[1+{1-(1+k)(y2/Ri2)}1/2]
+Ay4+By6+Cy8+Dy10+Ey12+Fy14
また、数値例における条件式(1)~(4)に対応する値を表中の(C)にまとめて示す。さらに参考値として、y(θmax)の値も示している。以上の数値例の説明は、他の実施例の数値例についても同じである。
表1の(C)に示すように、本実施例(数値例1)の光学系は条件式(1)~(4)を満足している。
図2は、本実施例(数値例1)の撮像距離∞での縦収差図を示す。球面収差図において、実線はd線(波長587.6nm)に対する球面収差を示している。非点収差図において、実線Sはサジタル像面を、破線Tはメリディオナル像面を示している。歪曲収差はd線に対するものを示している。これら縦収差図の説明は、他の実施例の縦収差図についても同じである。
前述したように、図3は本実施例の光学系の射影特性を示し、図4は本実施例の光学系の解像度特性を示している。
図5に示す実施例2の光学系は、実施例1に対して射影特性と屈折力配置が異なる実施例である。本実施例の光学系は、拡大共役側から縮小共役側へ順に配置された、正の屈折力の第1レンズL21、負の屈折力の第2レンズL22、正の屈折力の第3レンズL23および正の屈折力の第4レンズL24を含む前群と、開口絞りST2と、正の屈折力の第5レンズL25、負の屈折力の第6レンズL26および正の屈折力の第7レンズL27を含む後群とにより構成されている。拡大共役側から3つ目の第3レンズL23が、実施例1と異なり、正の屈折力を有する。図5において、P21はフィルター等のガラス平板である。
表2には、本実施例の具体的な数値例を示している。表2の(C)に示すように、本実施例(数値例2)の光学系は条件式(1)~(4)を満足している。
図6は、本実施例(数値例2)の撮像距離∞での縦収差図を示す。また前述したように、図7は本実施例の光学系の射影特性を示し、図8は本実施例の光学系の解像度特性を示している。
図9に示す実施例3の光学系は、実施例1に対して射影特性と画角が異なる実施例である。本実施例の光学系は、拡大共役側から縮小共役側へ順に配置された、正の屈折力の第1レンズL31、負の屈折力の第2レンズL32、負の屈折力の第3レンズL33および正の屈折力の第4レンズL34を含む前群と、開口絞りST3と、正の屈折力の第5レンズL35、負の屈折力の第6レンズL36および正の屈折力の第7レンズL37を含む後群とにより構成されている。図9において、P31はフィルター等のガラス平板である。
表3には、本実施例の具体的な数値例を示している。表3の(C)に示すように、本実施例(数値例3)の光学系は条件式(1)~(4)を満足している。
図10は、本実施例(数値例3)の撮像距離∞での縦収差図を示す。また前述したように、図11は本実施例の光学系の射影特性を示し、図12は本実施例の光学系の解像度特性を示している。
[表1]数値例1
(A)レンズ構成(単位mm)
f(焦点距離) 8.00
F(開口比) 3.00
最大半画角 90.0°
* r1 = 6.44 d1 = 3.74 n1 = 1.661 ν1 = 57.0
* r2 = 7.77 d2 = 1.27
* r3 = 11.42 d3 = 2.94 n2 = 1.861 ν2 = 26.8
* r4 = 5.11 d4 = 1.29
r5 = 10.17 d5 = 2.89 n3 = 1.841 ν3 = 44.3
r6 = 3.93 d6 = 2.89
r7 = 6.69 d7 = 1.05 n4 = 1.535 ν4 = 49.7
r8 = -6.62 d8 = 0.62
ST r9 = ∞ d9 = 1.23
r10 = 5.80 d10 = 1.14 n5 = 1.631 ν5 = 58.5
r11 = -5.73 d11 = 0.10
r12 = -4.74 d12 = 0.25 n6 = 1.859 ν6 = 28.8
r13 = 9.79 d13 = 0.11
* r14 = 7.71 d14 = 1.58 n7 = 1.657 ν7 = 57.2
* r15 = -6.30 d15 = 1.21
r16 = ∞ d16 = 0.65 n8 = 1.560 ν8 = 56.0
r17 = ∞ d17 = 1.64
r18 = ∞ d18 = 0.30 n9 = 1.500 ν9 = 63.0
r19 = ∞ d19 = 0.10

[表1]数値例1
(A)レンズ構成(単位mm)
f(焦点距離) 8.00
F(開口比) 3.00
最大半画角 90.0°
* r1 = 6.44 d1 = 3.74 n1 = 1.661 ν1 = 57.0
* r2 = 7.77 d2 = 1.27
* r3 = 11.42 d3 = 2.94 n2 = 1.861 ν2 = 26.8
* r4 = 5.11 d4 = 1.29
r5 = 10.17 d5 = 2.89 n3 = 1.841 ν3 = 44.3
r6 = 3.93 d6 = 2.89
r7 = 6.69 d7 = 1.05 n4 = 1.535 ν4 = 49.7
r8 = -6.62 d8 = 0.62
ST r9 = ∞ d9 = 1.23
r10 = 5.80 d10 = 1.14 n5 = 1.631 ν5 = 58.5
r11 = -5.73 d11 = 0.10
r12 = -4.74 d12 = 0.25 n6 = 1.859 ν6 = 28.8
r13 = 9.79 d13 = 0.11
* r14 = 7.71 d14 = 1.58 n7 = 1.657 ν7 = 57.2
* r15 = -6.30 d15 = 1.21
r16 = ∞ d16 = 0.65 n8 = 1.560 ν8 = 56.0
r17 = ∞ d17 = 1.64
r18 = ∞ d18 = 0.30 n9 = 1.500 ν9 = 63.0
r19 = ∞ d19 = 0.10
[表2]数値例2
(A)レンズ構成(単位mm)
f(焦点距離) 8.60
F(開口比) 2.40
最大半画角 90.0°
* r1 = 6.39 d1 = 2.85 n1 = 1.697 ν1 = 55.5
* r2 = 9.32 d2 = 0.50
r3 = 9.52 d3 = 2.00 n2 = 1.860 ν2 = 36.0
r4 = 3.97 d4 = 3.57
r5 = -16.14 d5 = 1.53 n3 = 1.850 ν3 = 32.0
r6 = -10.06 d6 = 1.13
r7 = -9.59 d7 = 2.00 n4 = 1.576 ν4 = 61.8
r8 = -6.11 d8 = 1.50
ST r9 = ∞ d9 = 0.50
r10 = 4.53 d10 = 1.69 n5 = 1.487 ν5 = 70.2
r11 = -4.43 d11 = 0.50
r12 = -3.76 d12 = 1.00 n6 = 1.850 ν6 = 32.0
r13 = 261.47 d13 = 0.50
r14 = 9.24 d14 = 2.42 n7 = 1.686 ν7 = 55.9
* r15 = -15.32 d15 = 0.96
r16 = ∞ d16 = 1.30 n8 = 1.516 ν8 = 64.1
r17 = ∞ d17 = 1.04

(A)レンズ構成(単位mm)
f(焦点距離) 8.60
F(開口比) 2.40
最大半画角 90.0°
* r1 = 6.39 d1 = 2.85 n1 = 1.697 ν1 = 55.5
* r2 = 9.32 d2 = 0.50
r3 = 9.52 d3 = 2.00 n2 = 1.860 ν2 = 36.0
r4 = 3.97 d4 = 3.57
r5 = -16.14 d5 = 1.53 n3 = 1.850 ν3 = 32.0
r6 = -10.06 d6 = 1.13
r7 = -9.59 d7 = 2.00 n4 = 1.576 ν4 = 61.8
r8 = -6.11 d8 = 1.50
ST r9 = ∞ d9 = 0.50
r10 = 4.53 d10 = 1.69 n5 = 1.487 ν5 = 70.2
r11 = -4.43 d11 = 0.50
r12 = -3.76 d12 = 1.00 n6 = 1.850 ν6 = 32.0
r13 = 261.47 d13 = 0.50
r14 = 9.24 d14 = 2.42 n7 = 1.686 ν7 = 55.9
* r15 = -15.32 d15 = 0.96
r16 = ∞ d16 = 1.30 n8 = 1.516 ν8 = 64.1
r17 = ∞ d17 = 1.04
[表3]数値例3
(A)レンズ構成(単位mm)
f(焦点距離) 14.50
F(開口比) 2.40
最大半画角 60.0°
* r1 = 14.30 d1 = 4.54 n1 = 1.861 ν1 = 37.1
* r2 = 29.93 d2 = 2.11
r3 = -78.81 d3 = 1.05 n2 = 1.963 ν2 = 24.1
r4 = 41.30 d4 = 2.25
r5 = -54.67 d5 = 0.88 n3 = 1.963 ν3 = 24.1
r6 = 56.88 d6 = 3.51
r7 = -99.86 d7 = 3.23 n4 = 1.923 ν4 = 27.3
r8 = -17.38 d8 = 10.33
ST r9 = ∞ d9 = 0.84
r10 = 8.26 d10 = 2.011795757 n5 = 1.628 ν5 = 53.5
r11 = -6.64 d11 = 0.64
r12 = -5.36 d12 = 0.31 n6 = 1.946 ν6 = 24.2
r13 = -48.45 d13 = 1.56
* r14 = 9.80 d14 = 4.48 n7 = 1.583 ν7 = 59.4
* r15 = -1000.00 d15 = 0.96
r16 = ∞ d16 = 1.30 n8 = 1.516 ν8 = 64.1
r17 = ∞ d17 = 1.00

(A)レンズ構成(単位mm)
f(焦点距離) 14.50
F(開口比) 2.40
最大半画角 60.0°
* r1 = 14.30 d1 = 4.54 n1 = 1.861 ν1 = 37.1
* r2 = 29.93 d2 = 2.11
r3 = -78.81 d3 = 1.05 n2 = 1.963 ν2 = 24.1
r4 = 41.30 d4 = 2.25
r5 = -54.67 d5 = 0.88 n3 = 1.963 ν3 = 24.1
r6 = 56.88 d6 = 3.51
r7 = -99.86 d7 = 3.23 n4 = 1.923 ν4 = 27.3
r8 = -17.38 d8 = 10.33
ST r9 = ∞ d9 = 0.84
r10 = 8.26 d10 = 2.011795757 n5 = 1.628 ν5 = 53.5
r11 = -6.64 d11 = 0.64
r12 = -5.36 d12 = 0.31 n6 = 1.946 ν6 = 24.2
r13 = -48.45 d13 = 1.56
* r14 = 9.80 d14 = 4.48 n7 = 1.583 ν7 = 59.4
* r15 = -1000.00 d15 = 0.96
r16 = ∞ d16 = 1.30 n8 = 1.516 ν8 = 64.1
r17 = ∞ d17 = 1.00
図14は、上述した各実施例の光学系を撮像光学系として用いた車載カメラ10とこれを備えた車載システム(運転支援装置)600の構成を示している。車載システム600は、自動車(車両)等の移動可能な移動体(移動装置)により保持され、車載カメラ10により取得した車両の周囲の画像情報に基づいて車両の運転(操縦)を支援するためのシステムである。
図15は、車載システム600を備えた移動装置としての車両700を示している。図15においては、車載カメラ10の撮像範囲50を車両700の前方に設定した場合を示しているが、撮像範囲50を車両700の後方や側方などに設定してもよい。
図15に示すように、車載システム600は、車載カメラ10と、車両情報取得装置20と、制御装置(制御部、ECU:エレクトロニックコントロールユニット)30と、警告装置(警告部)40とを備える。また、車載カメラ10は、撮像部1と、画像処理部2と、視差算出部3と、距離取得部(取得部)4と、衝突判定部5とを備えている。画像処理部2、視差算出部3、距離取得部4、及び衝突判定部5で、処理部が構成されている。撮像部1は、上述した各実施例の光学系と撮像素子とを有する。
図16のフローチャートは、車載システム600の動作例を示す。ステップS1では、撮像部1を用いて車両の周囲の障害物や歩行者などの対象物(被写体)を撮像し、複数の画像データ(視差画像データ)を取得する。
ステップS2では、車両情報取得装置20により車両情報の取得を行う。車両情報とは、車両の車速、ヨーレート、舵角などを含む情報である。
ステップS3では、撮像部1により取得された複数の画像データに対して、画像処理部2により画像処理を行う。具体的には、画像データにおけるエッジの量や方向、濃度値などの特徴量を解析する画像特徴解析を行う。ここで、画像特徴解析は、複数の画像データの夫々に対して行ってもよいし、複数の画像データのうち一部の画像データのみに対して行ってもよい。
ステップS4では、撮像部1により取得された複数の画像データ間の視差(像ずれ)情報を、視差算出部3によって算出する。視差情報の算出方法としては、SSDA法や面積相関法等の既知の方法を用いることができるため、ここでは説明を省略する。なお、ステップS2,S3,S4は、上記の順番に行われてもよいし、互いに並列して処理を行われてもよい。
ステップS5では、撮像部1により撮像した対象物との間隔情報を、距離取得部4によって取得(算出)する。距離情報は、視差算出部3により算出された視差情報と、撮像部1の内部パラメータおよび外部パラメータとに基づいて算出することができる。なお、ここでの距離情報とは、対象物との間隔、デフォーカス量、像ズレ量、などの対象物との相対位置に関する情報のことであり、画像内における対象物の距離値を直接的に表すものでも、距離値に対応する情報を間接的に表すものでもよい。
そして、ステップS6では、車両情報取得装置20により取得された車両情報や、距離取得部4により算出された距離情報を用いて、対象物までの距離が予め設定された設定距離の範囲内に含まれるか否かの判定を衝突判定部5によって行う。これにより、車両の周囲の設定距離内に対象物が存在するか否かを判定し、車両と対象物との衝突可能性を判定することができる。衝突判定部5は、設定距離内に対象物が存在する場合は「衝突可能性あり」と判定し(ステップS7)、設定距離内に対象物が存在しない場合は「衝突可能性なし」と判定する(ステップS8)。
次に、衝突判定部5は、「衝突可能性あり」と判定した場合、その判定結果を制御装置30や警告装置40に対して通知(送信)する。このとき、制御装置30は、衝突判定部5での判定結果に基づいて車両を制御し(ステップS6)、警告装置40は、衝突判定部5での判定結果に基づいて車両のユーザ(運転者、搭乗者)への警告を行う(ステップS7)。なお、判定結果の通知は、制御装置30及び警告装置40の少なくとも一方に対して行えばよい。
制御装置30は、車両の駆動部(エンジンやモータ等)に対して制御信号を出力することで、車両の移動を制御することができる。例えば、車両においてブレーキをかける、アクセルを戻す、ハンドルを切る、各輪に制動力を発生させる制御信号を生成してエンジンやモータの出力を抑制するなどの制御を行う。また、警告装置40は、ユーザに対して、例えば警告音(警報)を発する、カーナビゲーションシステムなどの画面に警告情報を表示する、シートベルトやステアリングに振動を与えるなどの警告を行う。
以上説明した車載システム600によれば、上記処理により、効果的に対象物の検知を行うことができ、車両と対象物との衝突を回避することが可能になる。特に、上述した各実施例の光学系を車載システム600に適用することで、車載カメラ10の全体を小型化して配置自由度を高めつつ、広画角にわたって対象物の検知および衝突判定を行うことが可能になる。
なお、距離情報の算出については、様々な方法を採り得るが、例として、撮像部1が有する撮像素子として、二次元アレイ状に規則的に配列された複数の画素部を有する瞳分割型の撮像素子を採用した場合について説明する。瞳分割型の撮像素子において、一つの画素部は、マイクロレンズと複数の光電変換部とから構成され、光学系の瞳における異なる領域を通過する一対の光束を受光し、対をなす画像データを各光電変換部から出力することができる。
そして、対をなす画像データ間の相関演算によって各領域の像ずれ量が算出され、距離取得部4により像ずれ量の分布を表す像ずれマップデータが算出される。あるいは、距離取得部4は、その像ずれ量をさらにデフォーカス量に換算し、デフォーカス量の分布(撮像画像の2次元平面上の分布)を表すデフォーカスマップデータを生成してもよい。また、距離取得部4は、デフォーカス量から変換される対象物との間隔の距離マップデータを取得してもよい。
また、車載システム600や移動装置700は、万が一移動装置700が障害物に衝突した場合に、その旨を車載システムの製造元(メーカー)や移動装置の販売元(ディーラー)などに通知するための通知装置(通知部)を備えていてもよい。例えば、通知装置としては、移動装置700と障害物との衝突に関する情報(衝突情報)を予め設定された外部の通知先に対して電子メールなどによって送信するもの採用することができる。
このように、通知装置によって衝突情報を自動通知する構成を採ることにより、衝突が生じた後に点検や修理などの対応を速やかに行うことができる。なお、衝突情報の通知先は、保険会社、医療機関、警察などや、ユーザが設定した任意のものであってもよい。また、衝突情報に限らず、各部の故障情報や消耗品の消耗情報を通知先に通知するように通知装置を構成してもよい。衝突の有無の検知については、上述した受光部2からの出力に基づいて取得された距離情報を用いて行ってもよいし、他の検知部(センサ)によって行ってもよい。
なお、車載システム600を運転支援(衝突被害軽減)に適用する場合について説明したが、これに限らず、車載システム600をクルーズコントロール(全車速追従機能付を含む)や自動運転などに適用してもよい。また、車載システム600は、自動車等の車両に限らず、例えば船舶や航空機、産業用ロボットなどの移動体に適用することができる。また、移動体に限らず、高度道路交通システム(ITS)等の物体認識を利用する種々の機器に適用することができる。
以上説明した各実施例は代表的な例にすぎず、本発明の実施に際しては、各実施例に対して種々の変形や変更が可能である。
L1,L21,L31 第1レンズ
L2,L22,L32 第2レンズ
L3,L23,L33 第3レンズ
L4,L24,L34 第4レンズ
L5,L25,L35 第5レンズ
L6,L26,L36 第6レンズ
L7,L27,L37 第7レンズ
11,21,31 像面
ST1,ST2,ST3 開口絞り
L2,L22,L32 第2レンズ
L3,L23,L33 第3レンズ
L4,L24,L34 第4レンズ
L5,L25,L35 第5レンズ
L6,L26,L36 第6レンズ
L7,L27,L37 第7レンズ
11,21,31 像面
ST1,ST2,ST3 開口絞り
Claims (21)
- 拡大共役側から縮小共役側へ順に配置された、3つ以上のレンズを含む前群と、開口絞りと、複数のレンズを含む後群からなる光学系であって、
最も拡大共役側のレンズは正レンズであり、
画角θと像高yとの関係を表す前記光学系の射影特性y(θ)が、前記光学系の最大半画角をθmax、前記光学系の焦点距離をfとするとき、
1.80≦fsinθmax/y(θmax)≦4.50
なる条件を満足することを特徴とする光学系。 - 前記前群は、負レンズと、 前記開口絞りに隣接する正レンズを含むことを特徴とする請求項1に記載の光学系。
- 最も拡大共役側の前記正レンズの焦点距離をf1、該正レンズに隣接するレンズの焦点距離をf2とするとき、
0.1≦|f2/f1|≦1.5
なる条件を満足することを特徴とする請求項1または2に記載の光学系。 - 前記前群は、拡大共役側から縮小共役側へ順に配置された、前記正レンズと、負レンズと、正レンズまたは負レンズと、正レンズからなり、
前記後群は、拡大共役側から縮小共役側へ順に配置された、正レンズと、負レンズと、正レンズからなることを特徴とする請求項1から3のいずれか一項に記載の光学系。 - 等距離射影fθの解像度がy(θmax)/θmaxと等しくなるときの半画角をθbとするとき、
0.20≦θb/θmax≦0.45
なる条件を満足することを特徴とする請求項1から4のいずれか一項に記載の光学系。 - 最も拡大共役側の前記正レンズが非球面を備えることを特徴とする請求項1から5のいずれか一項に記載の光学系。
- 最も拡大共役側の前記正レンズが、複数の変曲点を有する非球面を備えることを特徴とする請求項6に記載の光学系。
- 最も拡大共役側の前記正レンズが、光軸から径方向外側に向かって順に、拡大共役側に凸の形状、凹の形状および凸の形状を有する非球面を備えることを特徴とする請求項7に記載の光学系。
- 前記後群のうち最も縮小共役側のレンズが非球面を備えることを特徴とする請求項1から8のいずれか一項に記載の光学系。
- 前記最も縮小共役側のレンズが、変曲点を有する非球面を備えることを特徴とする請求項9に記載の光学系。
- θmax≧50°
なる条件を満足することを特徴とする請求項1から10のいずれか一項に記載の光学系。 - 請求項1から11のいずれか一項に記載の光学系と、
該光学系を介して物体を撮像する撮像素子とを備えることを特徴とする撮像装置。 - 請求項12に記載の撮像装置と、
該撮像装置により取得される前記物体の距離情報に基づいて、車両と前記物体との衝突可能性を判定する判定部とを備えることを特徴とする車載システム。 - 前記車両と前記物体との衝突可能性が有ると判定された場合に、前記車両の駆動部に制動力を発生させる制御信号を出力する制御装置を備えることを特徴とする請求項13に記載の車載システム。
- 前記車両と前記物体との衝突可能性が有ると判定された場合に、前記車両のユーザに対して警告を行う警告装置を備えることを特徴とする請求項13または14に記載の車載システム。
- 前記車両と前記物体との衝突に関する情報を外部に通知する通知装置を備えることを特徴とする請求項13から15のいずれか一項に記載の車載システム。
- 請求項12に記載の撮像装置を備え、該撮像装置を保持して移動可能であることを特徴とする移動装置。
- 前記撮像装置によって得られた前記物体の距離情報に基づいて前記物体との衝突可能性を判定する判定部を有することを特徴とする請求項17に記載の移動装置。
- 前記物体との衝突可能性が有ると判定された場合に、移動を制御する制御信号を出力する制御部を備えることを特徴とする請求項18に記載の移動装置。
- 前記物体との衝突可能性が有ると判定された場合に、前記移動装置のユーザに対して警告を行う警告部を備えることを特徴とする請求項17または19に記載の移動装置。
- 前記物体との衝突に関する情報を外部に通知する通知部を備えることを特徴とする請求項18から20のいずれか一項に記載の移動装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021011187A JP2022114764A (ja) | 2021-01-27 | 2021-01-27 | 光学系、撮像装置、車載システムおよび移動装置 |
| US17/580,906 US20220234504A1 (en) | 2021-01-27 | 2022-01-21 | Optical system, image pickup apparatus, in-vehicle system, and moving apparatus |
| EP22152952.2A EP4036625A1 (en) | 2021-01-27 | 2022-01-24 | Optical system, image pickup apparatus, in-vehicle system, and moving apparatus |
| CN202210093495.1A CN114815190A (zh) | 2021-01-27 | 2022-01-26 | 光学系统、摄像设备、车载系统和移动设备 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021011187A JP2022114764A (ja) | 2021-01-27 | 2021-01-27 | 光学系、撮像装置、車載システムおよび移動装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022114764A true JP2022114764A (ja) | 2022-08-08 |
| JP2022114764A5 JP2022114764A5 (ja) | 2024-01-29 |
Family
ID=80001488
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021011187A Pending JP2022114764A (ja) | 2021-01-27 | 2021-01-27 | 光学系、撮像装置、車載システムおよび移動装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20220234504A1 (ja) |
| EP (1) | EP4036625A1 (ja) |
| JP (1) | JP2022114764A (ja) |
| CN (1) | CN114815190A (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115980984B (zh) * | 2023-03-15 | 2023-06-27 | 江西联创电子有限公司 | 光学镜头 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5207761B2 (ja) * | 2008-02-12 | 2013-06-12 | キヤノン株式会社 | 光学系及びそれを有する光学機器 |
| CN102685382B (zh) * | 2011-03-18 | 2016-01-20 | 安尼株式会社 | 图像处理装置和方法、及移动体防碰撞装置 |
| JP5724755B2 (ja) * | 2011-08-26 | 2015-05-27 | 株式会社リコー | 撮像システム |
| JP2018087938A (ja) * | 2016-11-30 | 2018-06-07 | Hoya株式会社 | 撮像光学系 |
| JP7194979B2 (ja) | 2018-09-28 | 2022-12-23 | 学校法人 芝浦工業大学 | 撮像光学系及び撮像装置 |
| JP7189724B2 (ja) * | 2018-10-17 | 2022-12-14 | 東京晨美光学電子株式会社 | 撮像レンズ |
| WO2021184165A1 (zh) * | 2020-03-16 | 2021-09-23 | 江西晶超光学有限公司 | 光学系统、摄像模组及电子装置 |
| JP7391794B2 (ja) * | 2020-08-17 | 2023-12-05 | 富士フイルム株式会社 | 内視鏡用対物レンズおよび内視鏡 |
-
2021
- 2021-01-27 JP JP2021011187A patent/JP2022114764A/ja active Pending
-
2022
- 2022-01-21 US US17/580,906 patent/US20220234504A1/en active Pending
- 2022-01-24 EP EP22152952.2A patent/EP4036625A1/en active Pending
- 2022-01-26 CN CN202210093495.1A patent/CN114815190A/zh active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| US20220234504A1 (en) | 2022-07-28 |
| EP4036625A1 (en) | 2022-08-03 |
| CN114815190A (zh) | 2022-07-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2017150486A1 (ja) | 光学系、それを備える撮像装置及び投影装置 | |
| JP6519758B2 (ja) | レンズ系 | |
| CN109307929B (zh) | 带折射面和反射面的光学系统与图像拍摄装置和投影装置 | |
| WO2023276819A1 (ja) | 撮像システム | |
| JP2023016888A (ja) | 光学系、撮像装置、車載システムおよび移動装置 | |
| US20240111134A1 (en) | Optical system, image pickup apparatus, and image pickup system | |
| JP2022114764A (ja) | 光学系、撮像装置、車載システムおよび移動装置 | |
| JP7483451B2 (ja) | 光学系および撮像装置 | |
| JP2022114767A (ja) | 光学系、撮像装置、車載システムおよび移動装置 | |
| JP6983584B2 (ja) | 撮像装置、それを備える測距装置及び車載カメラシステム | |
| JP2021081663A (ja) | 光学系及びそれを備える撮像装置 | |
| CN113448064B (zh) | 光学系统、图像拾取装置、车载系统和移动装置 | |
| WO2017150492A1 (ja) | 光学系、それを備える撮像装置及び投影装置 | |
| JP7379112B2 (ja) | 光学系及びそれを備える撮像装置 | |
| JP2023183790A (ja) | 光学系、撮像装置、車載システム、および移動装置 | |
| US20230296881A1 (en) | Optical system including cemented lenses, imaging apparatus including the same, and moving apparatus including the same | |
| JP2022114765A (ja) | 光学系、撮像装置、車載システムおよび移動装置 | |
| JP2019028128A (ja) | 光学系、それを備える撮像装置及び投影装置 | |
| JP2018189747A (ja) | 光学系、それを備える撮像装置及び投影装置 | |
| JP2023037298A (ja) | 光学系、撮像装置、車載システム、および移動装置 | |
| JP2021081662A (ja) | 光学系及びそれを備える撮像装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240119 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20240119 |