JP2021081663A - 光学系及びそれを備える撮像装置 - Google Patents
光学系及びそれを備える撮像装置 Download PDFInfo
- Publication number
- JP2021081663A JP2021081663A JP2019210890A JP2019210890A JP2021081663A JP 2021081663 A JP2021081663 A JP 2021081663A JP 2019210890 A JP2019210890 A JP 2019210890A JP 2019210890 A JP2019210890 A JP 2019210890A JP 2021081663 A JP2021081663 A JP 2021081663A
- Authority
- JP
- Japan
- Prior art keywords
- optical
- optical element
- optical system
- reflection region
- vehicle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images









Classifications
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B13/00—Optical objectives specially designed for the purposes specified below
- G02B13/001—Miniaturised objectives for electronic devices, e.g. portable telephones, webcams, PDAs, small digital cameras
- G02B13/0015—Miniaturised objectives for electronic devices, e.g. portable telephones, webcams, PDAs, small digital cameras characterised by the lens design
- G02B13/002—Miniaturised objectives for electronic devices, e.g. portable telephones, webcams, PDAs, small digital cameras characterised by the lens design having at least one aspherical surface
- G02B13/0035—Miniaturised objectives for electronic devices, e.g. portable telephones, webcams, PDAs, small digital cameras characterised by the lens design having at least one aspherical surface having three lenses
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B17/00—Systems with reflecting surfaces, with or without refracting elements
- G02B17/08—Catadioptric systems
- G02B17/0804—Catadioptric systems using two curved mirrors
- G02B17/0816—Catadioptric systems using two curved mirrors off-axis or unobscured systems in which not all of the mirrors share a common axis of rotational symmetry, e.g. at least one of the mirrors is warped, tilted or decentered with respect to the other elements
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Lenses (AREA)
Abstract
【課題】小型でありながら良好な耐環境性を有する光学系を提供する。【解決手段】光学系100は、拡大側に向かって凸形状の第1反射領域G1Mを含む第1光学素子G1と、拡大側に向かって凸形状の縮小側面を有する第2光学素子G2と、拡大側に向かって凸形状の拡大側面を有する第3光学素子G3とを備え、第2光学素子G2の縮小側面又は第3光学素子G3の拡大側面は第2反射領域G2Mを含み、拡大側からの光は、第2反射領域G2M、第1反射領域G1M、第2光学素子G2の屈折領域、及び第3光学素子G3の屈折領域を順に介して縮小側へ向かい、所定の条件式を満足する。【選択図】図1
Description
本発明は、屈折面及び反射面を有する光学系に関し、例えば、デジタルスチルカメラやデジタルビデオカメラ、車載カメラ、携帯電話用カメラ、監視カメラ、ウェアラブルカメラ、医療用カメラ等の撮像装置に好適なものである。
反射面及び屈折面を用いることで小型化を図った反射屈折光学系が知られている。特許文献2には、反射面及び屈折面を含む反射屈折素子と反射面を含む反射素子とで構成される反射屈折光学系が開示されている。
反射屈折光学系においては、温度変化(環境変動)によって光学性能が変化してしまう可能性がある。しかしながら、特許文献1では光学系の耐環境性について一切考慮されていない。
本発明は、小型でありながら良好な耐環境性を有する光学系を提供することを目的とする。
上記目的を達成するための、本発明の一側面としての光学系は、拡大側に向かって凸形状の第1反射領域を含む第1光学素子と、拡大側に向かって凸形状の縮小側面を有する第2光学素子と、拡大側に向かって凸形状の拡大側面を有する第3光学素子とを備え、前記第2光学素子の縮小側面又は前記第3光学素子の拡大側面は第2反射領域を含み、拡大側からの光は、前記第2反射領域、前記第1反射領域、前記第2光学素子の屈折領域、及び前記第3光学素子の屈折領域を順に介して縮小側へ向かい、前記第1光学素子の屈折率の温度係数をDNDT1、前記第2光学素子の屈折率の温度係数をDNDT2、前記第3光学素子の屈折率の温度係数をDNDT3とするとき、DNDT1、DNDT1、及びDNDT3の少なくとも一つは負の値であり、0.00<|DNDT1/DNDT2|<12.00、0.00<|DNDT3/DNDT2|<8.00なる条件式を満足することを特徴とする。
本発明によれば、小型でありながら良好な耐環境性を有する光学系を提供することができる。
以下、本発明の好ましい実施形態について図面を参照しながら説明する。なお、各図面は、便宜的に実際とは異なる縮尺で描かれている場合がある。また、各図面において、同一の部材については同一の参照番号を付し、重複する説明を省略する。本実施形態において、「光学面」とは屈折面や反射面のことを指し、「光軸」とは光学系における各光学面の中心(面頂点)を通る軸を指し、「間隔」とは光軸上での面間隔のことを指すものとする。
図1(a)は、本発明の実施形態に係る撮像装置1000の光軸Aを含むYZ断面(第1の断面)における要部概略図であり、図1(b)は、撮像装置1000をY方向から見たときの要部概略図である。撮像装置1000は、光学系100と、光学系100を介して物体(被写体)を撮像する撮像素子110とを有する。なお、図1では、水平方向(H方向)において左側(−H側)が拡大側(物体側)であり、右側(+H側)が縮小側(像側)である。また、図1(b)では、Y方向における中心像高に向かう光束を示している。
本実施形態に係る光学系100は、不図示の物体からの光束を集光して物体の像を形成するための結像光学系(撮像光学系)である。像面IMGの位置には、光学系100によって形成された像の光電変換を行う撮像素子110の撮像面が配置されている。図1では、撮像素子110の撮像面のうち、被写体の結像に寄与する有効光束を受光する受光面のみを示している。撮像素子110としては、例えばCCDセンサやCMOSセンサ等の固体撮像素子を採用することができる。
光学系100は、第1光学素子G1、第2光学素子G2、第3光学素子G3を有する反射屈折光学系である。第1光学素子G1は拡大側(物体側)に向かって凸形状の第1反射領域G1Mを含み、第2光学素子G2は拡大側に向かって凸形状の縮小側面を含み、第3光学素子G3は拡大側に向かって凸形状の拡大側面を含んでいる。そして、第2光学素子G2の縮小側面は、第2反射領域G2Mを含んでいる。ただし、第2光学素子G2の縮小側面ではなく、第3光学素子G3の拡大側面に第2反射領域G2Mを設けてもよい。
このとき、拡大側からの光は、第1光学素子G1の屈折領域G1T、第2反射領域G2M、第1反射領域G1M、第2光学素子G2の屈折領域G2T、第3光学素子G3の屈折領域G3T、を順に介して縮小側(像側)へ向かい、像面IMGを形成する。このように、光学系100は、正のパワーの反射面(凹反射面)である第1反射領域G1Mと負のパワーの反射面(凸反射面)である第2反射領域G2Mとを備えることで、光路を折り畳んで小型化を実現しつつ、収差の発生を抑制することができる。このとき、第1反射領域G1M及び第2反射領域G2Mの配置は、シュバルツシルト光学系と同様になるため、絞り値(F値)が小さく明るい光学系を実現することが可能になる。
なお、本実施形態に係る撮像素子110の受光面は、光軸Aを含むYZ断面(第1の断面)において、光軸Aに対して一方の側(+Y側)にのみ配置されている。言い換えると、撮像素子110の受光面は、光学系100からの光束のうち、光軸Aの上に集光される軸上光束を受光せず、光軸Aに対して受光面とは反対側(−Y側)から光学系100に入射する軸外光束のみを受光するように配置されている。これにより、各反射面により光路を折り畳んで小型化を図りつつ、撮像素子110を光学系100及びその光路と干渉しないように配置することができる。
上述したように、反射屈折光学系においては、温度変化によって光学性能が変化してしまう可能性がある。そこで、本実施形態に係る光学系100では、温度変化が生じた場合のフォーカス変動を十分に抑制することができる構成を採っている。具体的には、第1光学素子G1、第2光学素子G2、及び第3光学素子G3の夫々の屈折率の温度係数(dn/dt)をDNDT1、DNDT1、及びDNDT3とするとき、そのうちの少なくとも一つを負の値としている。そして、光学系100は、以下の条件式(1)及び(2)を満足している。
0.00<|DNDT1/DNDT2|<12.00・・・(1)
0.00<|DNDT3/DNDT2|<8.00・・・ (2)
0.00<|DNDT1/DNDT2|<12.00・・・(1)
0.00<|DNDT3/DNDT2|<8.00・・・ (2)
各光学素子のうち少なくとも一つを屈折率の温度係数が負の値である材料で構成し、かつ条件式(1)及び(2)を満足することで、各光学素子の温度変化によるフォーカス変動を相殺することができる。条件式(1)及び(2)を満たさない場合、各光学素子の屈折率の温度係数のバランスが崩れてしまい、温度変化が生じた際のフォーカス変動を十分に抑制することが困難になる。具体的には、条件式(1)の上限値を上回ると、第2光学素子G2の温度係数に対して第1光学素子G1の温度係数が大きくなり過ぎてしまう。また、条件式(2)の上限値を上回ると、第2光学素子G2の温度係数に対して第3光学素子G3の温度係数が大きくなり過ぎてしまう。
更に、以下の条件式(1a)及び(2a),(1b)及び(2b)を順に満足することがより好ましい。
0.05<|DNDT1/DNDT2|<10.0・・・(1a)
0.02<|DNDT3/DNDT2|<6.00・・・(2a)
0.10<|DNDT1/DNDT2|<9.00・・・(1b)
0.05<|DNDT3/DNDT2|<5.00・・・(2b)
0.05<|DNDT1/DNDT2|<10.0・・・(1a)
0.02<|DNDT3/DNDT2|<6.00・・・(2a)
0.10<|DNDT1/DNDT2|<9.00・・・(1b)
0.05<|DNDT3/DNDT2|<5.00・・・(2b)
また、第1反射領域G1Mを含む光学面と第2反射領域G2Mを含む光学面との間隔をL1、第1反射領域G1Mを含む光学面と撮像素子110の受光面との間隔をL2とするとき、以下の条件式(3)を満足することが望ましい。
1.5≦L2/L1≦6.5・・・(3)
1.5≦L2/L1≦6.5・・・(3)
条件式(3)を満足することにより、光学系100を撮像装置に適用した場合に、光学系100の全長の増大を抑制しつつ、ゴーストの発生を抑制することが可能になる。条件式(3)の下限値を下回ると、第1反射領域G1Mを含む光学面と撮像素子110の受光面との間隔が小さくなり過ぎてしまい、不要光が撮像素子110の受光面に到達し易くなってしまう。また、条件式(3)の上限値を上回ると、第1反射領域G1Mを含む光学面と撮像素子110の受光面との間隔が大きくなり過ぎてしまい、光学系100の全長を短くすることが難しくなる。更に、以下の条件式(3a),(3b)を順に満足することがより好ましい。
1.6≦L2/L1≦4.0・・・(3a)
1.7≦L2/L1≦3.0・・・(3b)
1.6≦L2/L1≦4.0・・・(3a)
1.7≦L2/L1≦3.0・・・(3b)
また、第1反射領域G1Mを含む光学面の曲率半径をR1とするとき、以下の条件式(4)を満足することが望ましい。
1.3≦|R1/L1|≦4.0・・・(4)
1.3≦|R1/L1|≦4.0・・・(4)
条件式(4)を満足することにより、撮像素子110と各光路との干渉を回避しつつ、像面湾曲を良好に補正することが可能になる。条件式(4)の下限値を下回ると、撮像素子110が各光路と干渉してしまう可能性が生じる。また、条件式(4)の上限値を上回ると、像面湾曲の補正が不十分になり良好な結像性能を得ることが難しくなる。更に、以下の条件式(4a),(4b)を順に満足することがより好ましい。
1.5≦|R1/L1|≦3.0・・・(4a)
1.6≦|R1/L1|≦2.5・・・(4b)
1.5≦|R1/L1|≦3.0・・・(4a)
1.6≦|R1/L1|≦2.5・・・(4b)
また、光学系100の全長をLa、光学系100の(全系の)焦点距離をfとするとき、以下の条件式(5)を満足することが望ましい。ただし、本実施形態に係る光学系100の全長とは、光軸方向(Z方向)において像面IMGから最も離れた光学面と像面IMGとの間隔を指している。すなわち、本実施形態においては、第1光学素子G1の拡大側面と像面IMGとの間隔が光学系100の全長である。
La/f≦3.0・・・(5)
La/f≦3.0・・・(5)
条件式(5)を満足するように、光学系100の焦点距離で正規化した全長を小さくすることで、全系の小型化を実現することが可能になる。更に、以下の条件式(5a),(5b)を順に満足することがより好ましい。
La/f≦2.8・・・(5a)
La/f≦2.7・・・(5b)
La/f≦2.8・・・(5a)
La/f≦2.7・・・(5b)
[実施例1]
以下、本発明の実施例1に係る撮像装置1000について説明する。本実施例に係る撮像装置1000は、上述した実施形態に係る撮像装置1000と同様の構成を採っているため、重複する説明を省略する。
以下、本発明の実施例1に係る撮像装置1000について説明する。本実施例に係る撮像装置1000は、上述した実施形態に係る撮像装置1000と同様の構成を採っているため、重複する説明を省略する。
本実施例に係る光学系100は、正のパワーの屈折領域G1Tを含む第1光学素子G1と、負のパワーの屈折領域G2Tを含む第2光学素子G2と、正のパワーの屈折領域G3Tを含む第3光学素子G3とを備えている。また、第2光学素子G2の像側面に設けられた第2反射領域G2Mが開口絞りの役割を果たしている。この構成により、開口絞りの前後における各屈折領域のパワー配置の対称性を確保し、倍率色収差などの諸収差を良好に補正することができる。
具体的に、本実施例に係る第1光学素子G1は、物体側面及び像側面の両方が物体側に向かって凸形状である正メニスカスレンズであって、屈折領域G1T及び第1反射領域G1Mを有する反射屈折素子(反射屈折レンズ)である。本実施例に係る第1反射領域G1Mは、第1光学素子G1の像側面に設けられた表面鏡であるが、第1光学素子G1の物体側面に設けられた裏面鏡であってもよい。ただし、倍率色収差等の諸収差の補正のために、後述する開口絞りの前後での光の屈折回数の対称性を持たせるには、第1反射領域G1Mを表面鏡とすることが望ましい。
本実施例に係る第2光学素子G2は、物体側面及び像側面の両方が物体側に向かって凸形状である負メニスカスレンズであって、屈折領域G2T及び第2反射領域G2Mを有する反射屈折素子である。また、本実施例に係る第3光学素子G3は、正のパワーの両凸レンズであって、反射領域を持たない屈折素子(屈折レンズ)である。なお、第1光学素子G1、第2光学素子G2、及び第3光学素子G3の夫々の形状は、図1に示したものに限られず、必要に応じて適宜変更可能である。
このように、本実施例に係る光学系100では、第1光学素子G1及び第2光学素子G2を反射屈折素子としているため、光学素子の枚数の増大を抑制して全系を小型化しつつ、収差を良好に補正することができる。また、本実施例に係る第3光学素子G3は正のパワーの屈折領域G3Tを含んでいる。これにより、凸反射面である第2反射領域G2Mを有する第2光学素子G2の縮小側面における屈折領域G2Tで発生するコマ収差等の収差を良好に補正することができる。よって、第1光学素子G1及び第2光学素子G2を反射屈折素子とした小型な構成においても、高い結像性能を実現することが可能になる。
また、本実施例に係る第1光学素子G1において、第1反射領域G1Mは光軸Aに対して一方の側(+Y側)にのみ配置されている。ただし、本実施形態における反射領域とは、光学素子において結像に寄与する有効光を反射させる有効領域のことを指している。すなわち、仮に第1光学素子G1の有効領域外に反射面が形成されていたとしても、それは第1反射領域G1Mには含まれない。この構成によれば、上述したようにYZ断面において光路を光軸Aに対して非対称にすることで、光路同士の干渉を回避しつつ全系を小型化することができる。
そして、本実施例に係る第2反射領域G2Mは、有効光を反射する反射部と、それ以外の光を遮光する遮光部とで構成されており、開口絞りの役割を果たしている。反射部は反射膜(蒸着膜)などで構成され、遮光部は吸光部材で構成される。なお、第2光学素子G2の像側面ではなく、第3光学素子G3の物体側面に第2反射領域G2Mを設けてもよい。その場合は第2光学素子G2が屈折素子となり、第3光学素子G3が反射屈折素子となる。
ただし、第3光学素子G3の物体側面に第2反射領域G2Mを設けた場合、第2光学素子G2の像側面から光が出射する際に収差が発生してしまう可能性が生じる。よって、本実施例のように、第2光学素子G2の像側面に第2反射領域G2Mを設けることが好ましい。また、第3光学素子G3の物体側面に第2反射領域G2Mを設ける場合は、第2光学素子G2の像側面と第3光学素子G3の物体側面とを接合するか、あるいは各面を非球面とすることで、上述した収差の発生を抑制することが望ましい。
不図示の物体からの光は、第1光学素子G1の物体側面に入射し、第1光学素子G1の像側面における屈折領域G1T及び第2光学素子G2の物体側面における屈折領域G2Tを透過して、第2反射領域G2Mにおける反射部で反射される。このとき、光の一部は第2反射領域G2Mの遮光部により遮光される。第2反射領域G2Mの反射部で反射された光は、第2光学素子G2の物体側面を透過して、第1光学素子G1の像側面における第1反射領域G1Mで反射される。
第1反射領域G1Mで反射された光は、再び第2光学素子G2の物体側面に入射して、第2光学素子G2の屈折領域G2T及び第3光学素子G3の屈折領域G3Tを透過し、光学ブロックCGを介して平面形状の像面IMGを形成する。なお、光学ブロックCGは、カバーガラスや光学フィルター等に相当するパワーを持たない(結像に寄与しない)光学素子である。
図1(b)に示すように、X方向において、光学系100は光軸Aに対して対称な形状であり、物体側からの光は光軸Aに対して両側から第1光学素子G1に入射する。すなわち、Y方向の各位置でのZX断面において、光学系100は光軸Aに対して対称な形状である。一方、図1(a)に示すYZ断面においても、光学系100は光軸Aに対して対称な形状であるが、物体側からの光は光軸Aに対して下側(−Y側)のみから第1光学素子G1に入射し、光軸Aに対して上側(+Y側)に像面が形成される。このように、光学系100は、YZ断面において光が各光学面に斜入射する構成を採っている。
本実施例に係る光学系100の光軸Aを含むZX断面(第2の断面)での画角(水平画角)は50°である。光軸Aを基準(0°)として+X側を正、−X側を負とするとき、水平画角内の角度θxの範囲は−25°≦θx≦+25°である。また、光学系100の光軸Aを含むYZ断面での画角(垂直画角)は29°である。第1光学素子G1の物体側面に入射する中心光線を基準(0°)として+Y側を正、−Y側を負とするとき、垂直画角内の角度θyの範囲は−14.5°≦θy≦+14.5°である。なお、この中心光線と光軸Aとのなす角度は40°である。
本実施例に係る光学系100では、水平画角が光軸Aの両側に対称に設定されているのに対して、垂直画角は光軸Aに対して−Y側にのみ設定されている。そして、光学系100では、光軸Aを含むZX断面での画角よりも、光軸Aを含みZX断面に垂直なYZ断面での画角の方が小さくなっている。また、本実施例に係る光学系100は、全ての光学面の面頂点及び曲率中心が光軸Aの上に存在する共軸系であり、かつ全ての光学面が光軸Aに対して回転対称な形状である回転対称系である。このように、光学系100を共軸系かつ回転対称系とすることで、ZX断面及びYZ断面の夫々で諸収差を良好に補正することができる。
第2光学素子G2の物体側面における光軸Aに対して下側の領域は、物体側から入射する光に向かって凸形状であるため、光軸Aの近傍を通過する光よりも、光軸Aから離れた位置を通過する光の方を大きく屈折させる。よって、第2光学素子G2の物体側面における下側の領域に入射する各光の角度は不均一になり、コマ収差、倍率色収差、及び歪曲収差が発生してしまう。一方、第2光学素子G2の物体側面における光軸Aに対して上側の領域は、第1光学素子G1の方へ出射する光に向かって凹形状であるため、光軸Aの近傍を通過する光よりも、光軸Aから離れた位置を通過する光の方を大きく屈折させる。
ここで、第2光学素子G2の物体側面における下側の領域と上側の領域との間の光路には第2反射領域G2Mが配置されているため、光束内の各光線の配置(光軸Aからの距離の長短)は、下側の領域に入射する時と上側の領域から出射する時とで反対になる。よって本実施例に係る光学系100は、第2光学素子G2の物体側面における下側の領域で発生したコマ収差、倍率色収差、及び歪曲収差を、第2光学素子G2の物体側面における上側の領域によってキャンセルすることができる。
このとき、第1光学素子G1と第2光学素子G2との間の媒質と第2光学素子G2とに十分な屈折率差を生じさせるためには、その媒質の屈折率をできるだけ小さくすることが望ましい。具体的には、第1光学素子G1と第2光学素子G2との間の媒質を第2光学素子G2よりも小さい屈折率の材料とすることが望ましく、特に本実施例のように空気とすることがより好ましい。なお、必要に応じて、第1光学素子G1と第2光学素子G2との間に他の媒質(光学素子)を配置してもよい。ただし、その場合は、第1光学素子G1とそれに隣接する光学素子との間に、空気などの屈折率が小さい媒質を配置することが望ましい。
本実施例に係る第2反射領域G2Mは、上述したように凸形状の反射面であり、かつ開口絞りとしての機能を備えている。このように、負のパワーの第2反射領域G2Mを開口絞りとすることにより、像面湾曲や非点収差への影響を抑えつつ、球面収差を良好に補正することができる。また、第2反射領域G2Mに負のパワーを持たせることによって、第1反射領域G1Mと像面IMGとの間隔を適切に確保することができ、光学系100と撮像素子110との干渉を回避することが容易になる。なお、本実施例では、第2反射領域G2Mを、光軸Aから離れるに従ってパワーが小さくなる非球面とすることによって、球面収差をより良好に補正することを可能にしている。
また、本実施例に係る第2反射領域G2Mの反射部は楕円形状であり、その長軸はZX断面に平行、短軸はYZ断面に平行となっている。言い換えると、第2反射領域G2Mの反射部の光軸Aに垂直かつZX断面に平行なX方向(第1の方向)の直径は、反射部の光軸A及び第1の方向に垂直なY方向(第2の方向)の直径よりも大きくなっている。具体的に、本実施例に係る光学系100の絞り値は、X方向においてはF=1.2、Y方向においてはF=3.0である。
すなわち、本実施例に係る光学系100の絞り値は、光学系100の画角が光軸Aに対して対称であるZX断面よりも、光学系100の画角が光軸Aに対して非対称であるYZ断面の方が大きく(暗く)なるように設定されている。これにより、ZX断面において明るさと解像度を向上させつつ、YZ断面において光束幅を狭めて光路干渉を回避し易くすることができ、各光学面の配置の自由度を向上させることが可能になる。なお、第2反射領域G2Mの反射部は楕円形状に限られるものではなく、必要に応じて矩形などにしてもよい。
本実施例に係る第1反射領域G1Mは、主に像面湾曲を補正する役割を果たしている。一般的に、光学系において像面湾曲を補正するためには、正のパワーと負のパワーとの打ち消し合いによって各光学面のペッツバール和を小さくし、ペッツバール像面が平面に近づくように光学設計が行われる。それに対して、本実施例に係る光学系100では、第1光学素子G1の第1反射領域G1Mのサグ量を適切に設定することで像面湾曲を補正している。これについて、以下で詳細に説明する。
本実施例に係る光学系100は、全体として正のパワーを有しているため、像面近傍に結像した際のペッツバール像面は、光軸Aから周辺部へ向かうに従って物体側に変位した湾曲形状となる傾向がある。一方、第1反射領域G1Mは、凹形状、すなわち光軸Aから周辺部へ向かうに従って像側に変位した形状であるため、第1反射領域G1Mと像面IMGとの間隔は光軸Aから周辺部へ向かうに従って短くなる。
よって、第1反射領域G1Mが生じさせた像高毎の光路差により、光学系100の像面湾曲を良好に補正することができる。さらに、第1反射領域G1Mを非球面とすることで、第1反射領域G1Mが球面である場合に補正しきれない像面湾曲を、第1反射領域G1Mの非球面成分によって補正することができる。これにより、第1反射領域G1Mのサグ量の設計自由度を向上させることができ、像面湾曲をより良好に補正することが可能になる。
なお、光学系の像面湾曲を補正するためには、光軸上と比較して周辺部の方でパワーが小さくなるように非球面を構成することが一般的である。一方、本実施例では、一般的な光学系とは異なり第1反射領域G1Mのサグ量により像面湾曲を補正しているため、第1反射領域G1Mの非球面量は光軸A上と比較して周辺部でパワーが大きくなるように設定されている。
本実施例では、第1光学素子G1における屈折領域G1T及び第1反射領域G1Mによって、上述したような良好な収差補正を可能にしている。このとき、屈折領域G1T及び第1反射領域G1Mを一つの光学素子に設けることで、これらを互いに異なる光学素子に設ける場合と比較して、光学素子の枚数の増大や各光学素子の相対的な配置誤差の発生を抑制することができる。そして、第1光学素子G1を物体側に凸面を向けた正メニスカスレンズとすることで、光学系100を広角化した場合にも、屈折領域G1Tによって倍率色収差を良好に補正することができる。
上述したように、本実施例に係る第3光学素子G3は、正パワーを有することで、凸反射面である第2反射領域G2Mを有する第2光学素子G2の像側面における屈折領域G2Tで発生するコマ収差等の諸収差を良好に補正している。このとき、本実施例のように第3光学素子G3の像側面を物体側に向かって凹形状とすることが望ましい。光学系100における最も像側に配置された光学面(最終面)を物体側に向かって凹形状の屈折面とすることで、他の光学面で補正しきれなかった像面湾曲や非点収差を良好に補正することができる。ただし、必要に応じて第3光学素子G3の像側面を物体側に向かって凸形状としてもよいが、この場合は第3光学素子G3よりも像側に、物体側に向かって凹形状の屈折面を更に配置することが望ましい。
そして、後述する表1に示す通り、本実施例に係る光学系100は、上述した条件式(1)及び(2)を満足している。これにより、例えば環境温度が20℃から30℃に変化した場合の全系のフォーカス変動を、0.3μmに抑えることができる。
図2は、本実施例に係る光学系100の横収差図である。図2では、光学系100の5つの画角におけるC線(波長656.3nm)、d線(波長587.6nm)、F線(波長486.1nm)、及びg線(波長435.8nm)の夫々に対する横収差を示しており、数値の単位はmmである。図2を見て分かる通り、各収差(球面収差、コマ収差、倍率色収差、軸上色収差、像面湾曲、非点収差)が良好に補正されている。また、光学系100の開口率(ビネッティング)は全画角において100%であるため、第2反射領域G2Mによるケラレが生じておらず、軸上から軸外にかけて明るい光学系が実現できている。
[実施例2]
以下、本発明の実施例2に係る撮像装置2000について説明する。本実施例に係る撮像装置2000において、上述した実施例1に係る撮像装置1000と同等の構成については説明を省略する。図3(a)は、撮像装置2000の光軸Aを含むYZ断面における要部概略図であり、図3(b)は、撮像装置2000をY方向から見たときの要部概略図である。
以下、本発明の実施例2に係る撮像装置2000について説明する。本実施例に係る撮像装置2000において、上述した実施例1に係る撮像装置1000と同等の構成については説明を省略する。図3(a)は、撮像装置2000の光軸Aを含むYZ断面における要部概略図であり、図3(b)は、撮像装置2000をY方向から見たときの要部概略図である。
後述する表1に示す通り、本実施例に係る光学系200は、上述した条件式(1)及び(2)を満足している。これにより、例えば環境温度が20℃から30℃に変化した場合の全系のフォーカス変動を、0.0μmに抑えることができる。
図4は、本実施例に係る光学系200の横収差図である。図4を見て分かる通り、各収差が良好に補正されている。また、光学系200の開口率は全画角において100%であり、軸上から軸外にかけて明るい光学系が実現できている。
[数値実施例]
以下、上述した実施例1及び2に係る各光学系に対応する数値実施例1及び2を示す。各数値実施例において、面番号は拡大側から数えたときの光学面の番号(i)を示し、rは第i番目の光学面(第i面)の曲率半径[mm]を示し、dは第i面と第(i+1)面との間隔[mm]を示す。Nd及びνdの夫々は、第i面と第(i+1)面との間の媒質のd線に対する屈折率及びアッベ数を示す。また、Fnoは絞り値を示し、焦点距離の単位は[mm]である。ただし、面間隔dは、光路に沿って像側に向かうときに正、物体側に向かうときに負としている。なお、「E±N」は「×10±N」を意味している。
以下、上述した実施例1及び2に係る各光学系に対応する数値実施例1及び2を示す。各数値実施例において、面番号は拡大側から数えたときの光学面の番号(i)を示し、rは第i番目の光学面(第i面)の曲率半径[mm]を示し、dは第i面と第(i+1)面との間隔[mm]を示す。Nd及びνdの夫々は、第i面と第(i+1)面との間の媒質のd線に対する屈折率及びアッベ数を示す。また、Fnoは絞り値を示し、焦点距離の単位は[mm]である。ただし、面間隔dは、光路に沿って像側に向かうときに正、物体側に向かうときに負としている。なお、「E±N」は「×10±N」を意味している。
また、表1において、面番号の横に「*」が付いている光学面は非球面である。各数値実施例における非球面形状の各光学面は、光軸Aを中心とした回転対称形状であり、以下の非球面式で表される。
ただし、zは非球面形状の光軸方向のサグ量(mm)、cは光軸A上における曲率(1/mm)、kは円錐定数(コーニック定数)、rは光軸Aからの半径方向の距離(mm)、A〜Gの夫々は4次項〜14次項の非球面係数である。上記の非球面式において、第1項は参照球面のサグ量を示しており、この参照球面の曲率半径はR=1/cである。また、第2項以降の項は、参照球面上に付与される非球面成分のサグ量(非球面量)を示している。
なお、数値実施例1では4次項〜10次項の非球面係数を用いており、数値実施例2では4次項〜14次項の非球面係数を用いているが、夫々16次以上の項の非球面係数を用いてもよい。また、各数値実施例においては、光学面が非球面形状である場合、参照球面の曲率半径をその光学面の曲率半径としており、その曲率半径が上述した各条件式を満足している。
(数値実施例1)
各種データ
焦点距離 10.8
Fno(水平断面) 1.2
Fno(垂直断面) 3.0
画角(水平断面) ±25°
画角(垂直断面) ±14.5°
面データ
面番号 r d Nd νd
1 22.61 3.31 1.847 23.8
2* 22.98 3.15
3 37.27 7.97 1.487 70.2
4* 29.37 -7.97 1.487 70.2
5 37.27 -3.15
6* 22.98 3.15
7 37.27 7.97 1.487 70.2
8* 29.37 0.15
9 24.44 9.16 1.516 64.1
10 -43.13 0.89
11 ∞ 1.00 1.516 64.1
12 ∞ 1.00
非球面係数
面番号
2, 4,8 6,
K -4.65E-01 - -0.4202281
A 4.73E-06 2.27E-05 6.13E-06
B 2.78E-08 1.75E-10 1.59E-08
C -5.46E-11 5.85E-11 -8.36E-11
D 6.55E-13 -1.26E-13 6.80E-13
E -2.88E-15 - -2.47E-15
F 3.10E-18 - 4.08E-18
各種データ
焦点距離 10.8
Fno(水平断面) 1.2
Fno(垂直断面) 3.0
画角(水平断面) ±25°
画角(垂直断面) ±14.5°
面データ
面番号 r d Nd νd
1 22.61 3.31 1.847 23.8
2* 22.98 3.15
3 37.27 7.97 1.487 70.2
4* 29.37 -7.97 1.487 70.2
5 37.27 -3.15
6* 22.98 3.15
7 37.27 7.97 1.487 70.2
8* 29.37 0.15
9 24.44 9.16 1.516 64.1
10 -43.13 0.89
11 ∞ 1.00 1.516 64.1
12 ∞ 1.00
非球面係数
面番号
2, 4,8 6,
K -4.65E-01 - -0.4202281
A 4.73E-06 2.27E-05 6.13E-06
B 2.78E-08 1.75E-10 1.59E-08
C -5.46E-11 5.85E-11 -8.36E-11
D 6.55E-13 -1.26E-13 6.80E-13
E -2.88E-15 - -2.47E-15
F 3.10E-18 - 4.08E-18
(数値実施例2)
各種データ
焦点距離 10.8
Fno(水平断面) 1.2
Fno(垂直断面) 3.0
画角(水平断面) ±25°
画角(垂直断面) ±14.5°
面データ
面番号 r d Nd νd
1 24.05 3.7 1.69 53.2
2* 23.35 6.2
3 27.97 5.9 1.59 67.0
4* 27.70 0.0 1.59 67.0
5 27.70 -5.9
6* 27.97 -6.2
7 23.35 6.2 1.59 67.0
8* 27.97 5.9
9 27.70 1.5 1.53 74.7
10 35.30 6.8
11 ∞ 1.1 1.52 64.1
12 ∞ 0.5
非球面係数
面番号
1 2,6 4,8
K -0.6444045 -4.11E-01 0.00E+00
A 1.75E-06 6.37E-06 8.47E-06
B -2.53E-09 1.28E-08 3.66E-08
C 2.43E-11 -2.03E-11 1.74E-10
D -2.33E-13 3.32E-13 -6.48E-14
E 1.73E-16 -1.12E-15 -8.47E-15
F 1.90E-18 3.86E-17
各種データ
焦点距離 10.8
Fno(水平断面) 1.2
Fno(垂直断面) 3.0
画角(水平断面) ±25°
画角(垂直断面) ±14.5°
面データ
面番号 r d Nd νd
1 24.05 3.7 1.69 53.2
2* 23.35 6.2
3 27.97 5.9 1.59 67.0
4* 27.70 0.0 1.59 67.0
5 27.70 -5.9
6* 27.97 -6.2
7 23.35 6.2 1.59 67.0
8* 27.97 5.9
9 27.70 1.5 1.53 74.7
10 35.30 6.8
11 ∞ 1.1 1.52 64.1
12 ∞ 0.5
非球面係数
面番号
1 2,6 4,8
K -0.6444045 -4.11E-01 0.00E+00
A 1.75E-06 6.37E-06 8.47E-06
B -2.53E-09 1.28E-08 3.66E-08
C 2.43E-11 -2.03E-11 1.74E-10
D -2.33E-13 3.32E-13 -6.48E-14
E 1.73E-16 -1.12E-15 -8.47E-15
F 1.90E-18 3.86E-17
下記表1に、上述した各実施例に係る光学系についての各条件式に関する値を示す。ただし、L1、L2、R1、及びLaの値は上述した各数値実施例から求められる。表1に示すように、各実施例に係る光学系は上述した条件式(1)〜(5)を満足している。
[車載システム]
図5は、本実施形態に係る車載カメラ10及びそれを備える車載システム(運転支援装置)600の構成図である。車載システム600は、自動車(車両)等の移動可能な移動体(移動装置)により保持され、車載カメラ10により取得した車両の周囲の画像情報に基づいて、車両の運転(操縦)を支援するためのシステムである。図6は、車載システム600を備える移動装置としての車両700の概略図である。図6においては、車載カメラ10の撮像範囲50を車両700の前方に設定した場合を示しているが、撮像範囲50を車両700の後方や側方などに設定してもよい。
図5は、本実施形態に係る車載カメラ10及びそれを備える車載システム(運転支援装置)600の構成図である。車載システム600は、自動車(車両)等の移動可能な移動体(移動装置)により保持され、車載カメラ10により取得した車両の周囲の画像情報に基づいて、車両の運転(操縦)を支援するためのシステムである。図6は、車載システム600を備える移動装置としての車両700の概略図である。図6においては、車載カメラ10の撮像範囲50を車両700の前方に設定した場合を示しているが、撮像範囲50を車両700の後方や側方などに設定してもよい。
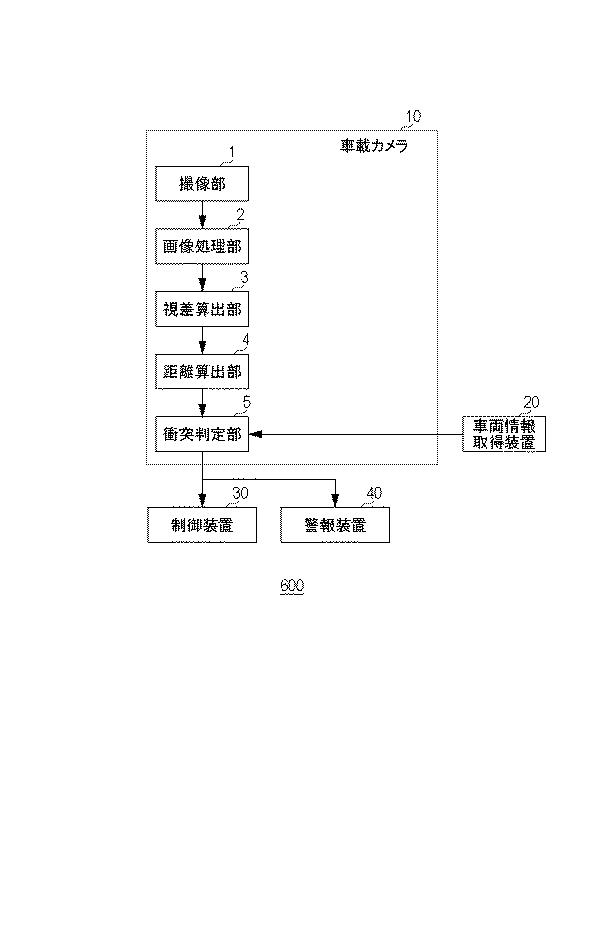
図5に示すように、車載システム600は、車載カメラ10と、車両情報取得装置20と、制御装置(制御部、ECU:エレクトロニックコントロールユニット)30と、警告装置(警告部)40とを備える。また、車載カメラ10は、撮像部1と、画像処理部2と、視差算出部3と、距離取得部(取得部)4と、衝突判定部5とを備えている。画像処理部2、視差算出部3、距離取得部4、及び衝突判定部5で、処理部が構成されている。撮像部1は、上述した何れかの実施例に係る撮像装置に対応する。
図7は、本実施形態に係る車載システム600の動作例を示すフローチャートである。以下、このフローチャートに沿って車載システム600の動作を説明する。
まず、ステップS1では、撮像部1を用いて車両の周囲の障害物や歩行者などの対象物(被写体)を撮像し、複数の画像データ(視差画像データ)を取得する。
また、ステップS2では、車両情報取得装置20により車両情報の取得を行う。車両情報とは、車両の車速、ヨーレート、舵角などを含む情報である。
ステップS3では、撮像部1により取得された複数の画像データに対して、画像処理部2により画像処理を行う。具体的には、画像データにおけるエッジの量や方向、濃度値などの特徴量を解析する画像特徴解析を行う。ここで、画像特徴解析は、複数の画像データの夫々に対して行ってもよいし、複数の画像データのうち一部の画像データのみに対して行ってもよい。
ステップS4では、撮像部1により取得された複数の画像データ間の視差(像ズレ)情報を、視差算出部3によって算出する。視差情報の算出方法としては、SSDA法や面積相関法などの既知の方法を用いることができるため、本実施形態では説明を省略する。なお、ステップS2,S3,S4は、上記の順番に行われてもよいし、互いに並列して処理を行われてもよい。
ステップS5では、撮像部1により撮像した対象物との間隔情報を、距離取得部4によって取得(算出)する。距離情報は、視差算出部3により算出された視差情報と、撮像部1の内部パラメータ及び外部パラメータと、に基づいて算出することができる。なお、ここでの距離情報とは、対象物との間隔、デフォーカス量、像ズレ量、などの対象物との相対位置に関する情報のことであり、画像内における対象物の距離値を直接的に表すものでも、距離値に対応する情報を間接的に表すものでもよい。
そして、ステップS6では、車両情報取得装置20により取得された車両情報や、距離取得部4により算出された距離情報を用いて、対象物までの距離が予め設定された設定距離の範囲内に含まれるか否かの判定を、衝突判定部5によって行う。これにより、車両の周囲の設定距離内に対象物が存在するか否かを判定し、車両と対象物との衝突可能性を判定することができる。衝突判定部5は、設定距離内に対象物が存在する場合は「衝突可能性あり」と判定し(ステップS7)、設定距離内に対象物が存在しない場合は「衝突可能性なし」と判定する(ステップS8)。
次に、衝突判定部5は、「衝突可能性あり」と判定した場合、その判定結果を制御装置30や警告装置40に対して通知(送信)する。このとき、制御装置30は、衝突判定部5での判定結果に基づいて車両を制御し(ステップS6)、警告装置40は、衝突判定部5での判定結果に基づいて車両のユーザ(運転者、搭乗者)への警告を行う(ステップS7)。なお、判定結果の通知は、制御装置30及び警告装置40の少なくとも一方に対して行えばよい。
制御装置30は、車両の駆動部(エンジンやモータなど)に対して制御信号を出力することで、車両の移動を制御することができる。例えば、車両においてブレーキをかける、アクセルを戻す、ハンドルを切る、各輪に制動力を発生させる制御信号を生成してエンジンやモータの出力を抑制するなどの制御を行う。また、警告装置40は、ユーザに対して、例えば警告音(警報)を発する、カーナビゲーションシステムなどの画面に警告情報を表示する、シートベルトやステアリングに振動を与えるなどの警告を行う。
以上、本実施形態に係る車載システム600によれば、上記の処理により、効果的に対象物の検知を行うことができ、車両と対象物との衝突を回避することが可能になる。特に、上述した各実施例に係る光学系を車載システム600に適用することで、車載カメラ10の全体を小型化して配置自由度を高めつつ、広画角にわたって対象物の検知及び衝突判定を行うことが可能になる。
なお、距離情報の算出については、様々な実施形態が考えられる。一例として、撮像部1が有する撮像素子として、二次元アレイ状に規則的に配列された複数の画素部を有する瞳分割型の撮像素子を採用した場合について説明する。瞳分割型の撮像素子において、一つの画素部は、マイクロレンズと複数の光電変換部とから構成され、光学系の瞳における異なる領域を通過する一対の光束を受光し、対をなす画像データを各光電変換部から出力することができる。
そして、対をなす画像データ間の相関演算によって各領域の像ずれ量が算出され、距離取得部4により像ずれ量の分布を表す像ずれマップデータが算出される。あるいは、距離取得部4は、その像ずれ量をさらにデフォーカス量に換算し、デフォーカス量の分布(撮像画像の2次元平面上の分布)を表すデフォーカスマップデータを生成してもよい。また、距離取得部4は、デフォーカス量から変換される対象物との間隔の距離マップデータを取得してもよい。
また、車載システム600や移動装置700は、万が一移動装置700が障害物に衝突した場合に、その旨を車載システムの製造元(メーカ)や移動装置の販売元(ディーラ)などに通知するための通知装置(通知部)を備えていてもよい。例えば、通知装置としては、移動装置700と障害物との衝突に関する情報(衝突情報)を予め設定された外部の通知先に対して電子メールなどによって送信するもの採用することができる。
このように、通知装置によって衝突情報を自動通知する構成を採ることにより、衝突が生じた後に点検や修理などの対応を速やかに行うことができる。なお、衝突情報の通知先は、保険会社、医療機関、警察などや、ユーザが設定した任意のものであってもよい。また、衝突情報に限らず、各部の故障情報や消耗品の消耗情報を通知先に通知するように通知装置を構成してもよい。衝突の有無の検知については、上述した受光部2からの出力に基づいて取得された距離情報を用いて行ってもよいし、他の検知部(センサ)によって行ってもよい。
なお、本実施形態では、車載システム600を運転支援(衝突被害軽減)に適用したが、これに限らず、車載システム600をクルーズコントロール(全車速追従機能付を含む)や自動運転などに適用してもよい。また、車載システム600は、自動車等の車両に限らず、例えば船舶や航空機、産業用ロボットなどの移動体に適用することができる。また、移動体に限らず、高度道路交通システム(ITS)等の物体認識を利用する種々の機器に適用することができる。
[測距装置]
以下、上述した各実施例に係る撮像装置を車載カメラなどの測距装置に適用する場合について詳細に説明する。
以下、上述した各実施例に係る撮像装置を車載カメラなどの測距装置に適用する場合について詳細に説明する。
上述したように、各実施例に係る光学系の垂直画角は、光軸Aに対して片側にのみ設定されている。よって、光学系を車載カメラ10に適用し、その車載カメラ10を車両に設置する場合は、被写体の位置に応じて光学系の光軸Aが水平方向に対して非平行となるように配置することが望ましい。例えば、上述した各実施例に係る光学系を測距光学系として採用する場合、光軸Aを水平方向に対して上側に傾け、垂直画角の中心が水平方向に近づくように配置すればよい。なお、各光学系をX軸周りに180°回転(上下反転)させてから、光軸Aが水平方向に対して下側に傾くように配置してもよい。これにより、車載カメラ10の撮像範囲を適切に設定することができる。
ただし、各実施例に係る光学系においては、軸上での結像性能が最も高く、それに対して周辺画角での結像性能は低下するため、注目する被写体からの光束が光学系における軸上付近を通過するように配置することがより好ましい。例えば、車載カメラ10によって道路上の標識や障害物などに注目する必要がある場合は、水平方向に対して上側(空側)よりも下側(地面側)の画角での結像性能を高めることが好ましい。このとき、各実施例に係る光学系を採用する場合、上述したように各光学系を一旦上下反転させてから、光軸Aを水平方向に対して下側に傾け、光軸Aの近傍の画角が下側を向くように配置すればよい。
図8は、各実施例に係る光学系を測距光学系として採用した場合の、第2反射領域G2Mにおける反射部をZ方向における−Z側から見たときの要部概略図である。図8において、実線は測距光学系の第2反射領域G2Mにおける反射部を示し、破線は実施例1及び2に係る光学系100,200の第2反射領域G2Mにおける反射部を示している。
図8に示すように、測距光学系の第2反射領域G2Mには、光軸Aに対してX方向に偏心した二つの反射部201,202(第1及び第2の反射部)が設けられている。この二つの反射部201,202によれば、測距光学系の瞳を分割することができる。反射部201,202は、各実施例と同様に反射膜などによって形成される。なお、測距光学系の夫々における反射部201,202の各絞り値は、X方向及びY方向において共に3.0である。
瞳を二分割する測距光学系を採用する場合、その像面に配置される撮像素子としては、反射部201を通過した光束が形成した被写体の像と、反射部202を通過した光束が形成した被写体の像とを区別して光電変換できるものが採用される。このような撮像素子と、測距光学系と、上述した処理部とによって、車載カメラなどの測距装置を構成することができる。
被写体が測距光学系の焦点面上にあるときは、測距光学系の像面において、分割された二つの光束による像に位置ずれは発生しない。しかし、被写体が測距光学系の焦点面以外の位置にあるときは、分割された二つの光束による像に位置ずれが発生する。このとき、各光束が形成する像の位置ずれは被写体の焦点面からの変位量に対応しているので、各光束による像の位置ずれ量及び位置ずれの方向を取得することで、被写体までの距離を測定することができる。
また、測距光学系の各光学素子を上述した各実施例と同様に構成することで、諸収差を良好に補正することができ、高い測距精度を実現することが可能になる。このとき、測距光学系の開口率は全画角において100%となるため、この測距光学系を測距装置に適用することで、全画角において安定した測距精度を確保することができる。
なお、測距光学系では二つの反射部をX方向に偏心させているが、必要に応じてY方向に偏心させてもよい。ただし、測距精度を向上させるためには、二つの反射部をX方向に偏心させることが望ましい。これは、二つの反射部を適用する前の光学系100,200において、光軸Aに対して非対称であるY方向における絞り値よりも、光軸Aに対して対称であるX方向における絞り値の方が小さいためである。
第2反射領域G2MがX方向において互いに離間した二つの反射部を含む場合においても、その有効領域のX方向の直径をY方向の直径よりも大きく設定することが望ましい。言い換えると、二つの反射部のX方向において最も離れた端部同士の距離を、二つの反射部のY方向における最大径よりも大きく設定することが望ましい。これにより、ZX断面において明るさと解像度を向上させつつ、YZ断面において光路干渉を回避し易くすることができる。
[投影装置]
上述した各実施例に係る光学系を投影光学系として投影装置に適用する場合、光学系の縮小面の位置に液晶パネル(空間変調器)等の表示素子の表示面が配置される。ただし、光学系が投影装置に適用される場合は、物体側と像側とが反転して光路が逆向きになる。すなわち、物体側に配置された表示素子の表示面(縮小面)に表示される画像を、光学系により像側に配置されたスクリーン等の投影面(拡大面)に投影(結像)させる構成を採ることができる。この場合にも、光学系を撮像装置に適用した場合と同様に、各実施例における各条件式を満足することが望ましい。
上述した各実施例に係る光学系を投影光学系として投影装置に適用する場合、光学系の縮小面の位置に液晶パネル(空間変調器)等の表示素子の表示面が配置される。ただし、光学系が投影装置に適用される場合は、物体側と像側とが反転して光路が逆向きになる。すなわち、物体側に配置された表示素子の表示面(縮小面)に表示される画像を、光学系により像側に配置されたスクリーン等の投影面(拡大面)に投影(結像)させる構成を採ることができる。この場合にも、光学系を撮像装置に適用した場合と同様に、各実施例における各条件式を満足することが望ましい。
[変形例]
以上、本発明の好ましい実施形態及び実施例について説明したが、本発明はこれらの実施形態及び実施例に限定されず、その要旨の範囲内で種々の組合せ、変形及び変更が可能である。
以上、本発明の好ましい実施形態及び実施例について説明したが、本発明はこれらの実施形態及び実施例に限定されず、その要旨の範囲内で種々の組合せ、変形及び変更が可能である。
例えば、各実施例では第1光学素子G1として第1反射領域G1M及び屈折領域G1Tの両方を含む反射屈折素子を採用しているが、第1光学素子G1として第1反射領域G1Mのみを含む反射素子(ミラー)を採用してもよい。
なお、撮像装置を外部(車両や建物)に対して固定(位置決め)する場合、光学系及び撮像素子を保持する保持部材(筐体)に位置決めのための基準面を設けることが考えられる。例えば、撮像装置を車両や建物の天井に設置する場合、夫々を鉛直方向において位置決めするためには、保持部材における光軸Aに対して鉛直方向における上側にのみ基準面を設ければよい。その際、上述したように、光学系の光軸Aを適切に傾けるためには、保持部材における基準面が光軸Aに対して非平行となるように構成することが望ましい。例えば、図9に示すように、保持部材60の鉛直方向における上側(+V側)の端部に、水平面(HX平面)と略平行な基準面70を設ければよい。
100 光学系
G1 第1光学素子
G2 第2光学素子
G3 第3光学素子
G1M 第1反射領域
G2M 第2反射領域
G1 第1光学素子
G2 第2光学素子
G3 第3光学素子
G1M 第1反射領域
G2M 第2反射領域
Claims (20)
- 拡大側に向かって凸形状の第1反射領域を含む第1光学素子と、
拡大側に向かって凸形状の縮小側面を有する第2光学素子と、
拡大側に向かって凸形状の拡大側面を有する第3光学素子とを備え、
前記第2光学素子の縮小側面又は前記第3光学素子の拡大側面は第2反射領域を含み、
拡大側からの光は、前記第2反射領域、前記第1反射領域、前記第2光学素子の屈折領域、及び前記第3光学素子の屈折領域を順に介して縮小側へ向かい、
前記第1光学素子の屈折率の温度係数をDNDT1、前記第2光学素子の屈折率の温度係数をDNDT2、前記第3光学素子の屈折率の温度係数をDNDT3とするとき、
DNDT1、DNDT1、及びDNDT3の少なくとも一つは負の値であり、
0.00<|DNDT1/DNDT2|<12.00
0.00<|DNDT3/DNDT2|<8.00
なる条件式を満足することを特徴とする光学系。 - 前記第2反射領域は、前記光の一部を反射する反射部と、前記光の一部を遮光する遮光部とを含むことを特徴とする請求項1に記載の光学系。
- 前記第2反射領域は、前記光の一部を反射する第1及び第2の反射部と、前記光の一部を遮光する遮光部とを含み、前記第1及び第2の反射部は、前記第1の断面に垂直な第1の方向において互いに離間していることを特徴とする請求項2に記載の光学系。
- 前記第2反射領域は、前記第2光学素子の縮小側面に含まれることを特徴とする請求項1乃至3の何れか一項に記載の光学系。
- 前記第2光学素子の屈折領域は、負のパワーを有することを特徴とする請求項1乃至4の何れか一項に記載の光学系。
- 前記第1反射領域は、前記第1光学素子の縮小側面に含まれることを特徴とする請求項1乃至5の何れか一項に記載の光学系。
- 前記第1光学素子は、正のパワーの屈折領域を含むことを特徴とする請求項1乃至6の何れか一項に記載の光学系。
- 前記第1反射領域を含む光学面と前記第2反射領域を含む光学面との間隔をL1、前記第1反射領域を含む光学面と受光面との間隔をL2とするとき、
1.5≦L2/L1≦6.5
なる条件式を満足することを特徴とする請求項1乃至7の何れか一項に記載の光学系。 - 前記第1反射領域を含む光学面と前記第2反射領域を含む光学面との間隔をL1、前記第1反射領域を含む光学面の曲率半径をR1とするとき、
1.3≦|R1/L1|≦4.0
なる条件式を満足することを特徴とする請求項1乃至8の何れか一項に記載の光学系。 - 前記第3光学素子の前記屈折領域は、正のパワーを有することを特徴とする請求項1乃至9の何れか一項に記載の光学系。
- 請求項1乃至10の何れか一項に記載の光学系と、該光学系を介して物体を撮像する撮像素子とを備ることを特徴とする撮像装置。
- 請求項11に記載の撮像装置と、該撮像装置により取得される前記物体の距離情報に基づいて車両と前記物体との衝突可能性を判定する判定部とを備えることを特徴とする車載システム。
- 前記車両と前記物体との衝突可能性が有ると判定された場合に、前記車両の駆動部に制動力を発生させる制御信号を出力する制御装置を備えることを特徴とする請求項12に記載の車載システム。
- 前記車両と前記物体との衝突可能性が有ると判定された場合に、前記車両の運転者に対して警告を行う警告装置を備えることを特徴とする請求項12又は13に記載の車載システム。
- 前記車両と前記対象物との衝突に関する情報を外部に通知する通知装置を備えることを特徴とする請求項12乃至14の何れか一項に記載の車載システム。
- 請求項15に記載の撮像装置を備え、該撮像装置を保持して移動可能であることを特徴とする移動装置。
- 前記撮像装置により取得される前記物体の距離情報に基づいて前記物体との衝突可能性を判定する判定部を有することを特徴とする請求項16に記載の移動装置。
- 前記物体との衝突可能性が有ると判定された場合に、移動を制御する制御信号を出力する制御部を備えることを特徴とする請求項17に記載の移動装置。
- 前記物体との衝突可能性が有ると判定された場合に、前記移動装置の運転者に対して警告を行う警告部を備えることを特徴とする請求項17又は18に記載の移動装置。
- 前記物体との衝突に関する情報を外部に通知する通知部を備えることを特徴とする請求項16乃至19の何れか一項に記載の移動装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019210890A JP2021081663A (ja) | 2019-11-21 | 2019-11-21 | 光学系及びそれを備える撮像装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019210890A JP2021081663A (ja) | 2019-11-21 | 2019-11-21 | 光学系及びそれを備える撮像装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2021081663A true JP2021081663A (ja) | 2021-05-27 |
Family
ID=75965125
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019210890A Pending JP2021081663A (ja) | 2019-11-21 | 2019-11-21 | 光学系及びそれを備える撮像装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2021081663A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023094332A1 (fr) * | 2021-11-25 | 2023-06-01 | Valeo Vision | Dispositif optique de projection à trois lentilles |
-
2019
- 2019-11-21 JP JP2019210890A patent/JP2021081663A/ja active Pending
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023094332A1 (fr) * | 2021-11-25 | 2023-06-01 | Valeo Vision | Dispositif optique de projection à trois lentilles |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7635192B2 (ja) | 光学系、撮像装置、車載システムおよび移動装置 | |
| JP6746328B2 (ja) | 光学系、それを備える撮像装置及び投影装置 | |
| JP7005207B2 (ja) | 光学系、それを備える撮像装置及び投影装置 | |
| WO2017150493A1 (ja) | 撮像装置及び投影装置 | |
| JP2017156712A (ja) | 光学系、それを備える撮像装置及び投影装置 | |
| JP7086572B2 (ja) | 光学系、撮像装置、測距装置、車載システム、および移動装置 | |
| US10908402B2 (en) | Image pickup apparatus including optical system having refractive surface and reflection surface, and on-board system and moving device provided with same | |
| JP2023000599A (ja) | 撮像レンズ系、カメラモジュール、車載システム、移動体 | |
| JP2018189747A (ja) | 光学系、それを備える撮像装置及び投影装置 | |
| JP2019028127A (ja) | 光学系、それを備える撮像装置及び投影装置 | |
| JP7483451B2 (ja) | 光学系および撮像装置 | |
| JP2021081663A (ja) | 光学系及びそれを備える撮像装置 | |
| JP6983584B2 (ja) | 撮像装置、それを備える測距装置及び車載カメラシステム | |
| JP2004325498A (ja) | コンバータレンズ、撮像レンズ及び車載カメラ装置 | |
| JP7379112B2 (ja) | 光学系及びそれを備える撮像装置 | |
| JP2021081662A (ja) | 光学系及びそれを備える撮像装置 | |
| JP2019028128A (ja) | 光学系、それを備える撮像装置及び投影装置 | |
| JP7635006B2 (ja) | 光学系、撮像装置、車載システムおよび移動装置 | |
| JP2020003736A (ja) | 撮像装置、それを備える移動装置及び測距装置 | |
| WO2017150492A1 (ja) | 光学系、それを備える撮像装置及び投影装置 | |
| JP2019045819A (ja) | 光学系、それを備える撮像装置及び投影装置 |