JP2022040175A - 超音波診断装置および超音波診断装置の作動方法 - Google Patents
超音波診断装置および超音波診断装置の作動方法 Download PDFInfo
- Publication number
- JP2022040175A JP2022040175A JP2021210960A JP2021210960A JP2022040175A JP 2022040175 A JP2022040175 A JP 2022040175A JP 2021210960 A JP2021210960 A JP 2021210960A JP 2021210960 A JP2021210960 A JP 2021210960A JP 2022040175 A JP2022040175 A JP 2022040175A
- Authority
- JP
- Japan
- Prior art keywords
- ultrasonic
- mode
- polarization
- image
- diagnosis
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images










Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B06—GENERATING OR TRANSMITTING MECHANICAL VIBRATIONS IN GENERAL
- B06B—METHODS OR APPARATUS FOR GENERATING OR TRANSMITTING MECHANICAL VIBRATIONS OF INFRASONIC, SONIC, OR ULTRASONIC FREQUENCY, e.g. FOR PERFORMING MECHANICAL WORK IN GENERAL
- B06B1/00—Methods or apparatus for generating mechanical vibrations of infrasonic, sonic, or ultrasonic frequency
- B06B1/02—Methods or apparatus for generating mechanical vibrations of infrasonic, sonic, or ultrasonic frequency making use of electrical energy
- B06B1/0207—Driving circuits
- B06B1/0215—Driving circuits for generating pulses, e.g. bursts of oscillations, envelopes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/54—Control of the diagnostic device
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/12—Diagnosis using ultrasonic, sonic or infrasonic waves in body cavities or body tracts, e.g. by using catheters
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/44—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device
- A61B8/4416—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device related to combined acquisition of different diagnostic modalities, e.g. combination of ultrasound and X-ray acquisitions
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/44—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device
- A61B8/4483—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device characterised by features of the ultrasound transducer
- A61B8/4488—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device characterised by features of the ultrasound transducer the transducer being a phased array
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/46—Ultrasonic, sonic or infrasonic diagnostic devices with special arrangements for interfacing with the operator or the patient
- A61B8/461—Displaying means of special interest
- A61B8/465—Displaying means of special interest adapted to display user selection data, e.g. icons or menus
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/52—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/5207—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving processing of raw data to produce diagnostic data, e.g. for generating an image
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/52—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/5215—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving processing of medical diagnostic data
- A61B8/5238—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving processing of medical diagnostic data for combining image data of patient, e.g. merging several images from different acquisition modes into one image
- A61B8/5261—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving processing of medical diagnostic data for combining image data of patient, e.g. merging several images from different acquisition modes into one image combining images from different diagnostic modalities, e.g. ultrasound and X-ray
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/52—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/5292—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves using additional data, e.g. patient information, image labeling, acquisition parameters
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/58—Testing, adjusting or calibrating the diagnostic device
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/86—Combinations of sonar systems with lidar systems; Combinations of sonar systems with systems not using wave reflection
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/89—Sonar systems specially adapted for specific applications for mapping or imaging
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/52017—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00 particularly adapted to short-range imaging
- G01S7/52019—Details of transmitters
- G01S7/5202—Details of transmitters for pulse systems
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/52017—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00 particularly adapted to short-range imaging
- G01S7/52053—Display arrangements
- G01S7/52057—Cathode ray tube displays
- G01S7/52074—Composite displays, e.g. split-screen displays; Combination of multiple images or of images and alphanumeric tabular information
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/52017—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00 particularly adapted to short-range imaging
- G01S7/52098—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00 particularly adapted to short-range imaging related to workflow protocols
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/523—Details of pulse systems
- G01S7/526—Receivers
- G01S7/53—Means for transforming coordinates or for evaluating data, e.g. using computers
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/56—Display arrangements
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/13—Tomography
- A61B8/14—Echo-tomography
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/46—Ultrasonic, sonic or infrasonic diagnostic devices with special arrangements for interfacing with the operator or the patient
- A61B8/461—Displaying means of special interest
- A61B8/463—Displaying means of special interest characterised by displaying multiple images or images and diagnostic data on one display
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/48—Diagnostic techniques
- A61B8/488—Diagnostic techniques involving Doppler signals
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/52—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/5215—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving processing of medical diagnostic data
- A61B8/5238—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving processing of medical diagnostic data for combining image data of patient, e.g. merging several images from different acquisition modes into one image
- A61B8/5246—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving processing of medical diagnostic data for combining image data of patient, e.g. merging several images from different acquisition modes into one image combining images from the same or different imaging techniques, e.g. color Doppler and B-mode
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Public Health (AREA)
- Heart & Thoracic Surgery (AREA)
- Veterinary Medicine (AREA)
- General Health & Medical Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- Surgery (AREA)
- Biophysics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Pathology (AREA)
- Radiology & Medical Imaging (AREA)
- Biomedical Technology (AREA)
- Molecular Biology (AREA)
- Medical Informatics (AREA)
- Remote Sensing (AREA)
- Radar, Positioning & Navigation (AREA)
- General Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Acoustics & Sound (AREA)
- Gynecology & Obstetrics (AREA)
- Human Computer Interaction (AREA)
- Mechanical Engineering (AREA)
- Ultra Sonic Daignosis Equipment (AREA)
- Endoscopes (AREA)
Abstract

【解決手段】本発明の超音波診断装置および超音波診断装置の作動方法においては、制御回路が、超音波診断を行うための複数の超音波振動子の累積駆動時間が規定時間以上となった場合に、超音波診断を行うための超音波の送信および反射波の受信が行われていない非診断期間内において、複数の超音波振動子に対して分極処理を行う。送信回路は、超音波診断を行う場合に、パルス発生回路を用いて、超音波診断を行うための駆動電圧を有する第1の送信信号を生成し、分極処理を行う場合に、第1の送信信号を生成する場合と同じパルス発生回路を用いて、分極処理を行うための分極用電圧を有する第2の送信信号を生成する。
【選択図】図4
Description
しかしながら、特許文献1に記載の超音波診断装置のように、再度分極を行うための専用回路および脱分極の検出機構等を設けることはハードウェアの変更要素が大きく、既存のシステムに搭載するのは非常に困難である。また、特許文献3に記載の超音波診断装置のように、圧電素子を再分極化するために高電圧を圧電素子の電極対に印加する高電圧印加部を設ける必要がある場合も同様である。
複数の超音波振動子が配列された超音波振動子アレイを用いて超音波を送信し、超音波の反射波を受信して受信信号を出力する超音波観察部を備える超音波内視鏡と、
受信信号を画像化して超音波画像を生成する超音波用プロセッサ装置と、を備え、
超音波用プロセッサ装置は、
超音波診断を行うための複数の超音波振動子の累積駆動時間が規定時間以上となった場合に、超音波診断を行うための超音波の送信および反射波の受信が行われていない非診断期間内において、複数の超音波振動子に対して分極処理を行う制御回路と、
制御回路の制御により、パルス発生回路を用いて、複数の超音波振動子を駆動して超音波を発生させる送信信号を生成して複数の超音波振動子に供給する送信回路と、を備え、
送信回路は、超音波診断を行う場合に、パルス発生回路を用いて、超音波診断を行うための駆動電圧を有する第1の送信信号を生成し、分極処理を行う場合に、第1の送信信号を生成する場合と同じパルス発生回路を用いて、分極処理を行うための分極用電圧を有する第2の送信信号を生成し、
第1の送信信号によって発生される第1の超音波の周波数帯域内における複数の超音波振動子の受信信号と、第2の送信信号によって発生される第2の超音波のメインローブの周波数帯域内における複数の超音波振動子の受信信号とは、異なる帯域特性を有するものである、超音波診断装置を提供する。
制御回路は、第一モードにおいて、累積駆動時間が規定時間以上となった場合に、動作モードを第一モードから第二モードに移行させ、第二モードにおいて、分極処理を行うための複数の超音波振動子の累積処理時間から累積駆動時間を減算した差が閾値以上となった場合に、動作モードを第二モードから第一モードに移行させることが好ましい。
制御回路は、ピクチャ・イン・ピクチャにより、超音波画像が内視鏡画像よりも小さく表示された場合に、分極処理中であることをユーザに通知するように通知回路を制御し、超音波画像の1フレームの画像を表示するフリーズモードに設定して分極処理を行うことが好ましい。
超音波診断装置の超音波内視鏡が備える超音波観察部が、複数の超音波振動子が配列された超音波振動子アレイを用いて超音波を送信し、超音波の反射波を受信して受信信号を出力するステップと、
超音波診断装置の超音波用プロセッサ装置が、受信信号を画像化して超音波画像を生成するステップと、を含み
超音波画像を生成するステップは、
超音波診断を行うための複数の超音波振動子の累積駆動時間が規定時間以上となった場合に、超音波用プロセッサ装置の制御回路が、超音波診断を行うための超音波の送信および反射波の受信が行われていない非診断期間内において、複数の超音波振動子に対して分極処理を行うステップと、
超音波用プロセッサ装置の送信回路が、制御回路の制御により、パルス発生回路を用いて、複数の超音波振動子を駆動して超音波を発生させる送信信号を生成して複数の超音波振動子に供給するステップと、を含み、
送信信号を生成するステップは、超音波診断を行う場合に、パルス発生回路を用いて、超音波診断を行うための駆動電圧を有する第1の送信信号を生成するステップと、分極処理を行う場合に、第1の送信信号を生成する場合と同じパルス発生回路を用いて、分極処理を行うための分極用電圧を有する第2の送信信号を生成するステップと、を含み、
第1の送信信号によって発生される第1の超音波の周波数帯域内における複数の超音波振動子の受信信号と、第2の送信信号によって発生される第2の超音波のメインローブの周波数帯域内における複数の超音波振動子の受信信号とは、異なる帯域特性を有するものである、超音波診断装置の作動方法を提供する。
分極処理を行うステップは、第一モードにおいて、累積駆動時間が規定時間以上となった場合に、動作モードを第一モードから第二モードに移行させ、第二モードにおいて、分極処理を行うための複数の超音波振動子の累積処理時間から累積駆動時間を減算した差が閾値以上となった場合に、動作モードを第二モードから第一モードに移行させることが好ましい。
また、非診断期間内において分極処理を行うため、フレームレートは低下しない。そのため、超音波画像の画質を低下させることなく、複数の超音波振動子の受信感度を常に良好に保つことができ、従って常に高画質な超音波画像を取得することができる。
なお、本実施形態は、本発明の代表的な実施態様であるが、あくまでも一例に過ぎず、本発明を限定するものではない。
本実施形態に係る超音波診断装置10について、図1を参照しながら、その概要を説明する。図1は、超音波診断装置10の概略構成を示す図である。
なお、超音波内視鏡12については、後の項で詳しく説明する。
なお、超音波用プロセッサ装置14については、後の項で詳しく説明する。
ここで、「観察対象隣接部位」とは、患者の体腔内壁のうち、観察対象部位と隣り合う位置にある部分である。
なお、本実施形態では、一台のモニタ20に超音波画像及び内視鏡画像を表示するが、超音波画像表示用のモニタと、内視鏡画像表示用のモニタとが別々に設けられてもよい。また、モニタ20以外の表示形態、例えば、術者が携帯する端末のディスプレイに表示する形態にて超音波画像及び内視鏡画像を表示してもよい。
ここで、「ライブモード」は、所定のフレームレートにて得られる超音波画像(動画像)を逐次表示(リアルタイム表示)するモードである。「フリーズモード」は、過去に生成された超音波画像(動画像)の1フレームの画像(静止画像)を、後述のシネメモリ150から読み出して表示するモードである。
なお、上述した超音波画像生成モードは、あくまでも一例であり、上述した3種類のモード以外のモード、例えば、A(Amplitude)モード及びM(Motion)モード等が更に含まれてもよい。
次に、超音波内視鏡12の構成について、既出の図1及び図2~図4を参照しながら説明する。図2は、超音波内視鏡12の挿入部22の先端部及びその周辺を拡大して示した平面図である。図3は、超音波内視鏡12の挿入部22の先端部40を図2に図示のI-I断面にて切断したときの断面を示す断面図である。
超音波観察部36は、超音波画像を取得するために設けられた部分であり、挿入部22の先端部40において先端側に配置されている。超音波観察部36は、図3に示すように超音波振動子ユニット46と、複数の同軸ケーブル56と、FPC(Flexible Printed Circuit)60とを備える。
電極は、複数の超音波振動子48の各々に対して個別に設けられた個別電極(不図示)と、複数の超音波振動子48に共通の振動子グランド(不図示)とからなる。また、電極は、同軸ケーブル56及びFPC60を介して超音波用プロセッサ装置14と電気的に接続される。
なお、本実施形態では、超音波診断の実施期間中、つまり、超音波画像(動画像)の取得が開始されてから終了されるまでの期間(より詳しくは、ライブモードで超音波診断が実施された時間)を累積駆動時間としているが、これに限定されるものではなく、駆動対象振動子に駆動電圧を供給した時間を累積駆動時間としてもよい。
内視鏡観察部38は、内視鏡画像を取得するために設けられた部分であり、挿入部22の先端部40において超音波観察部36よりも基端側に配置されている。内視鏡観察部38は、図2~図3に示すように観察窓82、対物レンズ84、固体撮像素子86、照明窓88、洗浄ノズル90及び配線ケーブル92等によって構成されている。
送水タンク21aは、脱気水を貯留するタンクであり、送気送水用チューブ34aにより光源用コネクタ32cに接続されている。なお、脱気水は、洗浄ノズル90から噴出される洗浄用液体として用いられる。
送気送水管路62は、その一端側で洗浄ノズル90に通じており、他端側では、操作部24に設けられた送気送水ボタン28aに接続している。送気送水ボタン28aは、送気送水管路のほかに、送水タンク21aに接続されている。
操作部24は、超音波診断の開始時、診断中及び診断終了時等において術者によって操作される部分であり、その一端にはユニバーサルコード26の一端が接続されている。また、操作部24は、図1に示すように、送気送水ボタン28a、吸引ボタン28b、一対のアングルノブ29、並びに処置具挿入口(鉗子口)30を有する。
処置具挿入口30は、鉗子等の処置具(不図示)を挿通するために形成された孔であり、処置具チャンネル45を介して処置具導出口44と連絡している。処置具挿入口30に挿入された処置具は、処置具チャンネル45を通過した後に処置具導出口44から体腔内に導入される。
超音波用プロセッサ装置14は、超音波振動子ユニット46に超音波を送受信させ、且つ、超音波受信時に超音波振動子48(詳しくは駆動対象素子)が出力した受信信号を画像化して超音波画像を生成する。また、超音波用プロセッサ装置14は、生成した超音波画像をモニタ20に表示する。
送信回路144は、FPGA(フィールドプログラマブルゲートアレイ)、パルサー(パルス発生回路158)、及びSW(スイッチ)等からなり、MUX(マルチプレクサ140)に接続される。なお、FPGAの代わりにASIC(特定用途向け集積回路)を用いても良い。
一方、CPU(制御回路)152は、分極処理を行う場合には、複数の超音波振動子48の分極処理を行うために、超音波画像の取得のための超音波探触子(超音波振動子ユニット46)としてのプローブ周波数帯域と異なる周波数の分極用駆動パルス(第2の送信信号)を生成するように送信回路144(パルス発生回路158)を制御する。
その結果、本発明では、分極処理を行う場合には、分極用駆動パルスが複数の超音波振動子48に印加され、分極用駆動パルスによって複数の超音波振動子48の分極処理が行われる。
なお、本実施形態では、ASIC148のようなハードウェア回路によって上述の機能(具体的には、位相整合部160、Bモード画像生成部162、PWモード画像生成部164、CFモード画像生成部166及びメモリコントローラ151)を実現しているが、これに限定されるものではない。中央演算装置(CPU)と各種データ処理を実行させるためのソフトウェア(コンピュータプログラム)とを協働させることで上記の機能を実現させてもよい。
通知方法は、特に限定されず、例えば分極処理中である旨のメッセージをモニタ20に表示してもよいし、音声で通知してもよいし、あるいは表示ランプ等によって分極処理中である旨を通知してもよい。
さらに、CPU152は、超音波診断終了時に内視鏡側メモリ58にアクセスし、内視鏡側メモリ58に記憶された累積駆動時間を、直前に実施していた超音波診断の所要時間の分だけ加算した値に更新する。
次に、超音波診断装置10の動作例として、超音波診断に関する一連の処理(以下、診断処理とも言う)の流れを、図5~図8を参照しながら説明する。図5は、超音波診断装置10を用いた診断処理の流れを示す図である。図6は、第一モードにおける診断処理の流れを示す図であり、図7は、第二モードにおける診断処理の流れを示す図である。図8は、診断処理中の診断ステップの手順を示す図である。
閾値は、超音波振動子48の受信感度を初期感度Piに回復させる上で適切な値に設定されており、超音波用プロセッサ装置14側で記録されている。なお、閾値は、超音波内視鏡12毎に異なっていてもよく、あるいは、超音波内視鏡12間で共通した値であってもよい。また、閾値としてデフォルト値が設定されていてもよいし、術者が操作卓100を通じて閾値を変更することが可能な構成であってもよい。
図9の例の場合、時間に応じた感度低下率と感度回復率とが同じであるとすれば、ta1+ta2+ta3+ta4=tr1+tr2+tr3となる。実際には、感度回復は短時間で可能であり、感度低下率よりも感度回復率の方が高いので、ta1+ta2+ta3+ta4=α(tr1+tr2+tr3)(α<1)となり、Ta+ta1+ta2=αTrという関係性が成り立つ。
例えば、上記の関係性に基づいて、閾値を決定することができる。あるいは、累積駆動時間Taと、累積駆動時間Taに応じて低下された超音波振動子48の受信感度を初期感度Piまで回復させるために必要な閾値との関係を表す対応テーブルをあらかじめ作成しておき、この対応テーブル用いて、累積駆動時間Taから閾値を算出して使用することができる。
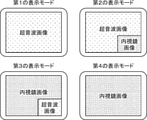
図10に示すように、表示モードには、超音波画像のみを表示する第1の表示モード、ピクチャ・イン・ピクチャ(PinP)により、超音波画像を内視鏡画像よりも大きく表示する第2の表示モード、同じくPinPにより、超音波画像を内視鏡画像よりも小さく表示する第3の表示モード、および内視鏡画像のみを表示する第4の表示モードがある。ユーザの指示により、第1~第4の表示モードを任意に切り替えて表示させることができる。
この場合、CPU152は、分極処理中であることをユーザに通知するように通知回路156を制御する。これに応じて、通知回路156により、分極処理中であることがユーザに通知される。つまり、ユーザは、第3の表示モードの場合に、分極処理中であることを知ることができる。その後、CPU152は、フリーズモードに設定して、つまり、強制的に非診断期間に設定して分極処理を行う。
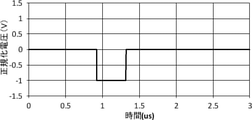
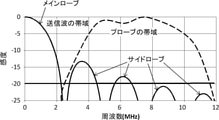
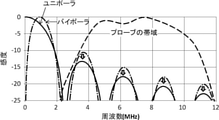
本発明においては、分極用駆動パルスの駆動波形は、特に制限的では無いが、図11Aに示すユニポーラの波形を持ち、図11Bに実線で示す周波数特性を持つ駆動波形を有する分極用駆動パルスを用いて超音波振動子48の分極処理を行うことが好ましい。図11Bに示す例では、例えば、-20dB以上のレベルの感度において、超音波画像を取得するためのプローブ周波数帯域は、破線で示すように、約2.7MHz~約11.7MHzであるのに対し、実線で示す分極用駆動パルスの駆動波形のメインローブの帯域は、約2.3MHz以下である。即ち、分極用駆動パルスの周波数の帯域特性と、診断用駆動パルスの周波数の帯域特性とは、-20dB以上のレベルの感度において重ならない。
一般的に、プローブの周波数特性の仕様は、送受信感度の-20dBの帯域で表現される。これは、感度のピークから1/10以下の信号はほとんど画像に影響しない点から決められているからである。一方、送信波の帯域についてはプローブと異なり、送信部分のみであるため、20dB/2=10dBのレベルが閾値となる。そのため、送信成分として考えると-10dBの方がより好ましいからである。
このため、送信波形を図11Aに示すようなユニポーラの波形にすることにより、メインローブだけでなく、高調波成分が抑えられ、より高い効果が期待できる。
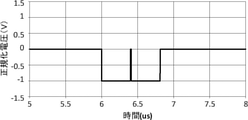
また、図13Cに示すように、分極用駆動パルスの駆動波形をユニポーラの波形で波形間に最小クロック数分の時間を開けた複数のパルス波形を繋いだ分極用駆動パルスの送信を行うことが好ましい。即ち、本発明では、送信回路144は、分極用駆動パルスとして、複数のユニポーラの波形を、この波形の間隔を超音波用プロセッサ装置14において規定される最小クロック数の時間空けて出力することが好ましい。
この理由は、分極処理には直流電圧を印加することが最適であるが、本発明のように、既存の送信回路構成を有する送信回路144を用いる場合には直流電圧の送信ができないからである。
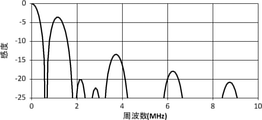
また、図13Dに2点鎖線で示すように、分極用駆動パルスの駆動波形として、図13Cに示す複数のユニポーラの波形を組み合わせて用いることにより、図13Dに実線で示す1つのユニポーラの波形をからなる分極用駆動パルスの駆動波形よりも、サイドローブの最大感度を低下させることができる。
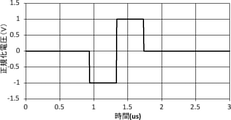
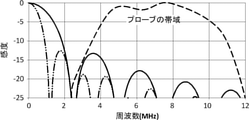
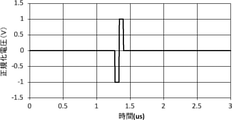
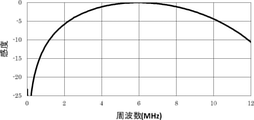
これらに対し、図14A、及び図14Bは、図4に示す送信回路から送信される診断用駆動パルスの駆動波形の一例のグラフ、及びその駆動波形の感度と周波数の関係を示すグラフである。図14Aに示す駆動波形は、中心周波数6MHzのバイポーラの1つの波の波形である。診断用駆動パルスの駆動波形の周波数特性を図14Bに示す。
超音波診断装置10は、既存の送信回路144、より詳しくはパルス発生回路158を用いて分極処理を行う。超音波診断装置10において、分極処理を行う場合の第2の送信信号はパルス波であり、パルス発生回路158は直流波形を出力する必要はないので、既存の回路を大幅に変更することなく、従ってコストアップを招くことなく分極処理を行うことができる。
また、非診断期間内において分極処理を行うため、フレームレートは低下しない。そのため、超音波画像の画質を低下させることなく、複数の超音波振動子48の受信感度を常に良好に保つことができ、従って常に高画質な超音波画像を取得することができる。
12 超音波内視鏡
14 超音波用プロセッサ装置
16 内視鏡用プロセッサ装置
18 光源装置
20 モニタ
21a 送水タンク
21b 吸引ポンプ
22 挿入部
24 操作部
26 ユニバーサルコード
28a 送気送水ボタン
28b 吸引ボタン
29 アングルノブ
30 処置具挿入口
32a 超音波用コネクタ
32b 内視鏡用コネクタ
32c 光源用コネクタ
34a 送気送水用チューブ
34b 吸引用チューブ
36 超音波観察部
38 内視鏡観察部
40 先端部
42 湾曲部
43 軟性部
44 処置具導出口
45 処置具チャンネル
46 超音波振動子ユニット
48 超音波振動子
50 超音波振動子アレイ
54 バッキング材層
56 同軸ケーブル
58 内視鏡側メモリ
60 FPC
74 音響整合層
76 音響レンズ
82 観察窓
84 対物レンズ
86 固体撮像素子
88 照明窓
90 洗浄ノズル
92 配線ケーブル
100 操作卓
140 マルチプレクサ
142 受信回路
144 送信回路
146 A/Dコンバータ
148 ASIC
150 シネメモリ
151 メモリコントローラ
152 CPU
154 DSC
156 通知回路
158 パルス発生回路
160 位相整合部
162 Bモード画像生成部
164 PWモード画像生成部
166 CFモード画像生成部
Claims (13)
- 超音波画像および内視鏡画像を取得する超音波診断装置であって、
複数の超音波振動子が配列された超音波振動子アレイを用いて超音波を送信し、前記超音波の反射波を受信して受信信号を出力する超音波観察部を備える超音波内視鏡と、
前記受信信号を画像化して前記超音波画像を生成する超音波用プロセッサ装置と、を備え、
前記超音波用プロセッサ装置は、
超音波診断を行うための前記複数の超音波振動子の累積駆動時間が規定時間以上となった場合に、前記超音波診断を行うための前記超音波の送信および前記反射波の受信が行われていない非診断期間内において、前記複数の超音波振動子に対して分極処理を行う制御回路と、
前記制御回路の制御により、パルス発生回路を用いて、前記複数の超音波振動子を駆動して前記超音波を発生させる送信信号を生成して前記複数の超音波振動子に供給する送信回路と、を備え、
前記送信回路は、前記超音波診断を行う場合に、前記パルス発生回路を用いて、前記超音波診断を行うための駆動電圧を有する第1の送信信号を生成し、前記分極処理を行う場合に、前記第1の送信信号を生成する場合と同じ前記パルス発生回路を用いて、前記分極処理を行うための分極用電圧を有する第2の送信信号を生成し、
前記第1の送信信号によって発生される第1の超音波の周波数帯域内における前記複数の超音波振動子の受信信号と、前記第2の送信信号によって発生される第2の超音波のメインローブの周波数帯域内における前記複数の超音波振動子の受信信号とは、異なる帯域特性を有するものである、超音波診断装置。 - 前記第1の送信信号によって発生される第1の超音波の周波数帯域内における前記複数の超音波振動子の受信信号の帯域特性と、前記第2の送信信号によって発生される第2の超音波のメインローブの周波数帯域内における前記複数の超音波振動子の受信信号の帯域特性とは、-20dB以上のレベルにおいて重ならないものである、請求項1に記載の超音波診断装置。
- 動作モードとして、前記非診断期間内において前記分極処理を行わない第一モードと、前記非診断期間内において前記分極処理を行う第二モードと、を有し、
前記制御回路は、前記第一モードにおいて、前記累積駆動時間が前記規定時間以上となった場合に、前記動作モードを前記第一モードから前記第二モードに移行させ、前記第二モードにおいて、前記分極処理を行うための前記複数の超音波振動子の累積処理時間から前記累積駆動時間を減算した差が閾値以上となった場合に、前記動作モードを前記第二モードから前記第一モードに移行させる、請求項1または2に記載の超音波診断装置。 - 前記制御回路は、前記超音波画像の1フレームの画像を表示するフリーズモードの場合に前記分極処理を行う、請求項1ないし3のいずれか一項に記載の超音波診断装置。
- 前記制御回路は、前記超音波診断装置の制御パラメータを設定するための画面が表示された場合に前記分極処理を行う、請求項1ないし3のいずれか一項に記載の超音波診断装置。
- 前記制御回路は、前記超音波診断を行う患者の情報を入力する画面が表示された場合に前記分極処理を行う、請求項1ないし3のいずれか一項に記載の超音波診断装置。
- 前記制御回路は、前記超音波診断を行う部位を指定する画面が表示された場合に前記分極処理を行う、請求項1ないし3のいずれか一項に記載の超音波診断装置。
- 前記制御回路は、過去に生成された超音波画像を表示する画面が表示された場合に前記分極処理を行う、請求項1ないし3のいずれか一項に記載の超音波診断装置。
- 前記制御回路は、前記内視鏡画像のみが表示された場合に前記分極処理を行う、請求項1ないし3のいずれか一項に記載の超音波診断装置。
- 前記超音波用プロセッサ装置は、さらに、前記分極処理中であることをユーザに通知する通知回路を備え、
前記制御回路は、ピクチャ・イン・ピクチャにより、前記超音波画像が前記内視鏡画像よりも小さく表示された場合に、前記分極処理中であることを前記ユーザに通知するように前記通知回路を制御し、前記超音波画像の1フレームの画像を表示するフリーズモードに設定して前記分極処理を行う、請求項1ないし3のいずれか一項に記載の超音波診断装置。 - 超音波画像および内視鏡画像を取得する超音波診断装置の作動方法であって、
前記超音波診断装置の超音波内視鏡が備える超音波観察部が、複数の超音波振動子が配列された超音波振動子アレイを用いて超音波を送信し、前記超音波の反射波を受信して受信信号を出力するステップと、
前記超音波診断装置の超音波用プロセッサ装置が、前記受信信号を画像化して前記超音波画像を生成するステップと、を含み
前記前記超音波画像を生成するステップは、
超音波診断を行うための前記複数の超音波振動子の累積駆動時間が規定時間以上となった場合に、前記超音波用プロセッサ装置の制御回路が、前記超音波診断を行うための前記超音波の送信および前記反射波の受信が行われていない非診断期間内において、前記複数の超音波振動子に対して分極処理を行うステップと、
前記超音波用プロセッサ装置の送信回路が、前記制御回路の制御により、パルス発生回路を用いて、前記複数の超音波振動子を駆動して前記超音波を発生させる送信信号を生成して前記複数の超音波振動子に供給するステップと、を含み、
前記送信信号を生成するステップは、前記超音波診断を行う場合に、前記パルス発生回路を用いて、前記超音波診断を行うための駆動電圧を有する第1の送信信号を生成するステップと、前記分極処理を行う場合に、前記第1の送信信号を生成する場合と同じ前記パルス発生回路を用いて、前記分極処理を行うための分極用電圧を有する第2の送信信号を生成するステップと、を含み、
前記第1の送信信号によって発生される第1の超音波の周波数帯域内における前記複数の超音波振動子の受信信号と、前記第2の送信信号によって発生される第2の超音波のメインローブの周波数帯域内における前記複数の超音波振動子の受信信号とは、異なる帯域特性を有するものである、超音波診断装置の作動方法。 - 前記第1の送信信号によって発生される第1の超音波の周波数帯域内における前記複数の超音波振動子の受信信号の帯域特性と、前記第2の送信信号によって発生される第2の超音波のメインローブの周波数帯域内における前記複数の超音波振動子の受信信号の帯域特性とは、-20dB以上のレベルにおいて重ならないものである、請求項11に記載の超音波診断装置の作動方法。
- 動作モードとして、前記非診断期間内において前記分極処理を行わない第一モードと、前記非診断期間内において前記分極処理を行う第二モードと、を有し、
前記分極処理を行うステップは、前記第一モードにおいて、前記累積駆動時間が前記規定時間以上となった場合に、前記動作モードを前記第一モードから前記第二モードに移行させ、前記第二モードにおいて、前記分極処理を行うための前記複数の超音波振動子の累積処理時間から前記累積駆動時間を減算した差が閾値以上となった場合に、前記動作モードを前記第二モードから前記第一モードに移行させる、請求項11または12に記載の超音波診断装置の作動方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021210960A JP7355804B2 (ja) | 2018-06-29 | 2021-12-24 | 超音波診断装置および超音波診断装置の作動方法 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018124170A JP7001556B2 (ja) | 2018-06-29 | 2018-06-29 | 超音波診断装置および超音波診断装置の作動方法 |
| JP2021210960A JP7355804B2 (ja) | 2018-06-29 | 2021-12-24 | 超音波診断装置および超音波診断装置の作動方法 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018124170A Division JP7001556B2 (ja) | 2018-06-29 | 2018-06-29 | 超音波診断装置および超音波診断装置の作動方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2022040175A true JP2022040175A (ja) | 2022-03-10 |
| JP2022040175A5 JP2022040175A5 (ja) | 2022-06-14 |
| JP7355804B2 JP7355804B2 (ja) | 2023-10-03 |
Family
ID=66630246
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018124170A Active JP7001556B2 (ja) | 2018-06-29 | 2018-06-29 | 超音波診断装置および超音波診断装置の作動方法 |
| JP2021210960A Active JP7355804B2 (ja) | 2018-06-29 | 2021-12-24 | 超音波診断装置および超音波診断装置の作動方法 |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018124170A Active JP7001556B2 (ja) | 2018-06-29 | 2018-06-29 | 超音波診断装置および超音波診断装置の作動方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (2) | US11583257B2 (ja) |
| EP (1) | EP3586982B1 (ja) |
| JP (2) | JP7001556B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112557516B (zh) * | 2020-12-18 | 2023-03-14 | 济南大学 | 一种钪酸铋-钛酸铅-铁酸铋三元体系压电陶瓷及其声发射传感器 |
| CN117915838A (zh) * | 2021-09-21 | 2024-04-19 | 富士胶片株式会社 | 超声波内窥镜系统及超声波内窥镜系统的工作方法 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05167124A (ja) * | 1991-12-13 | 1993-07-02 | Fujitsu Ltd | 圧電アクチュエータ装置 |
| JP2004230033A (ja) * | 2003-01-31 | 2004-08-19 | Toshiba Corp | 超音波探触子再分極装置、超音波プローブ及び超音波診断装置 |
| JP2009233247A (ja) * | 2008-03-28 | 2009-10-15 | Fujinon Corp | 超音波検査システム及び画像処理装置 |
| JP2013004645A (ja) * | 2011-06-15 | 2013-01-07 | Seiko Epson Corp | 圧電センサー装置、および圧電センサー装置における圧電体の分極方法 |
| JP2013168573A (ja) * | 2012-02-16 | 2013-08-29 | Mitsubishi Heavy Ind Ltd | 超音波厚みセンサの製造方法 |
| JP2015062621A (ja) * | 2013-09-26 | 2015-04-09 | ジーイー・メディカル・システムズ・グローバル・テクノロジー・カンパニー・エルエルシー | 超音波装置 |
Family Cites Families (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5598728A (en) | 1979-01-22 | 1980-07-28 | Olympus Optical Co Ltd | Motor drive camera |
| JP3631257B2 (ja) * | 1992-08-28 | 2005-03-23 | オリンパス株式会社 | 電子内視鏡装置 |
| JP3110587B2 (ja) * | 1993-06-08 | 2000-11-20 | フクダ電子株式会社 | 超音波探触子の製造方法 |
| DE69426057T2 (de) * | 1993-11-29 | 2001-05-10 | Olympus Optical Co., Ltd. | Anordnung zur Bildrotation und Überlagerung |
| JPH08280098A (ja) * | 1995-04-07 | 1996-10-22 | Olympus Optical Co Ltd | 超音波探触子用圧電素子 |
| US6425869B1 (en) | 2000-07-18 | 2002-07-30 | Koninklijke Philips Electronics, N.V. | Wideband phased-array transducer for uniform harmonic imaging, contrast agent detection, and destruction |
| JP2002368301A (ja) * | 2001-06-07 | 2002-12-20 | Sony Corp | 圧電素子の再分極システム及びその再分極手段、並びに投映システム |
| WO2008015917A1 (en) * | 2006-08-02 | 2008-02-07 | Konica Minolta Medical & Graphic, Inc. | Ultrasonic probe, and ultrasonic probe manufacturing method |
| EP2164396A2 (en) * | 2007-06-01 | 2010-03-24 | Koninklijke Philips Electronics N.V. | Light weight wireless ultrasound probe |
| JP2009273838A (ja) * | 2008-05-19 | 2009-11-26 | Fujifilm Corp | 超音波探触子、超音波診断装置及び超音波内視鏡装置 |
| JP5203858B2 (ja) * | 2008-09-01 | 2013-06-05 | 富士フイルム株式会社 | 医用画像表示装置、医用画像表示方法、並びに医用画像表示プログラム |
| JP5230331B2 (ja) * | 2008-09-30 | 2013-07-10 | 富士フイルム株式会社 | 映像信号切替装置 |
| JP2012139460A (ja) | 2011-01-06 | 2012-07-26 | Toshiba Corp | 超音波診断装置及び超音波プローブ |
| JP5874208B2 (ja) | 2011-06-15 | 2016-03-02 | セイコーエプソン株式会社 | 圧電センサー装置、超音波センサー、および圧電センサー装置の駆動方法 |
| JP6051693B2 (ja) * | 2012-09-03 | 2016-12-27 | セイコーエプソン株式会社 | 超音波プローブ、電子機器及び超音波診断装置 |
| JP5949599B2 (ja) * | 2013-03-05 | 2016-07-06 | コニカミノルタ株式会社 | 複合圧電体の製造方法、超音波探触子の製造方法、複合圧電体、超音波探触子及び超音波画像診断装置 |
| US10709491B2 (en) * | 2013-08-06 | 2020-07-14 | Memorial Sloan-Kettering Cancer Center | System, method and computer-accessible medium for in-vivo tissue ablation and/or damage |
| US9883848B2 (en) * | 2013-09-13 | 2018-02-06 | Maui Imaging, Inc. | Ultrasound imaging using apparent point-source transmit transducer |
| EP3238636A4 (en) * | 2014-12-26 | 2018-09-19 | Olympus Corporation | Medical diagnostic device, ultrasonic observation system, method for operating medical diagnostic device, and program for operating medical diagnostic device |
| JP6017746B1 (ja) * | 2015-04-30 | 2016-11-02 | オリンパス株式会社 | 医療用診断装置、超音波観察システム、医療用診断装置の作動方法および医療用診断装置の作動プログラム |
| JP2017056156A (ja) * | 2015-09-18 | 2017-03-23 | テルモ株式会社 | 画像診断用カテーテル |
| JP6728630B2 (ja) * | 2015-10-29 | 2020-07-22 | セイコーエプソン株式会社 | 圧電素子、圧電モジュール、電子機器、及び圧電素子の製造方法 |
| JP2017143353A (ja) | 2016-02-08 | 2017-08-17 | セイコーエプソン株式会社 | 超音波センサー及び超音波センサー用圧電素子の駆動方法 |
| JP6665667B2 (ja) * | 2016-04-28 | 2020-03-13 | セイコーエプソン株式会社 | 超音波デバイス、超音波モジュール、及び超音波測定装置 |
| JP6683029B2 (ja) * | 2016-06-20 | 2020-04-15 | コニカミノルタ株式会社 | 圧電素子、超音波探触子および超音波撮像装置 |
| EP3493744B1 (en) * | 2016-08-02 | 2019-11-27 | Koninklijke Philips N.V. | System for determining cardiac output |
| JP7141868B2 (ja) * | 2018-06-29 | 2022-09-26 | 富士フイルム株式会社 | 超音波診断装置、及び超音波診断装置の作動方法 |
-
2018
- 2018-06-29 JP JP2018124170A patent/JP7001556B2/ja active Active
-
2019
- 2019-05-22 EP EP19175942.2A patent/EP3586982B1/en active Active
- 2019-05-31 US US16/428,687 patent/US11583257B2/en active Active
-
2021
- 2021-12-24 JP JP2021210960A patent/JP7355804B2/ja active Active
-
2023
- 2023-01-18 US US18/156,129 patent/US12121402B2/en active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05167124A (ja) * | 1991-12-13 | 1993-07-02 | Fujitsu Ltd | 圧電アクチュエータ装置 |
| JP2004230033A (ja) * | 2003-01-31 | 2004-08-19 | Toshiba Corp | 超音波探触子再分極装置、超音波プローブ及び超音波診断装置 |
| JP2009233247A (ja) * | 2008-03-28 | 2009-10-15 | Fujinon Corp | 超音波検査システム及び画像処理装置 |
| JP2013004645A (ja) * | 2011-06-15 | 2013-01-07 | Seiko Epson Corp | 圧電センサー装置、および圧電センサー装置における圧電体の分極方法 |
| JP2013168573A (ja) * | 2012-02-16 | 2013-08-29 | Mitsubishi Heavy Ind Ltd | 超音波厚みセンサの製造方法 |
| JP2015062621A (ja) * | 2013-09-26 | 2015-04-09 | ジーイー・メディカル・システムズ・グローバル・テクノロジー・カンパニー・エルエルシー | 超音波装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7001556B2 (ja) | 2022-01-19 |
| US20230148999A1 (en) | 2023-05-18 |
| US20200000437A1 (en) | 2020-01-02 |
| JP7355804B2 (ja) | 2023-10-03 |
| EP3586982A1 (en) | 2020-01-01 |
| US11583257B2 (en) | 2023-02-21 |
| US12121402B2 (en) | 2024-10-22 |
| JP2020000605A (ja) | 2020-01-09 |
| EP3586982B1 (en) | 2023-05-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7367152B2 (ja) | 超音波診断装置、及び超音波診断装置の作動方法 | |
| US12369889B2 (en) | Ultrasound diagnostic apparatus and operation method of ultrasound diagnostic apparatus | |
| JP7265593B2 (ja) | 超音波システム、及び、超音波画像生成方法 | |
| US12121402B2 (en) | Ultrasound diagnostic apparatus and operation method of ultrasound diagnostic apparatus | |
| JP6987029B2 (ja) | 超音波診断装置、及び、超音波診断装置の作動方法 | |
| JP2021035442A (ja) | 超音波診断システムおよび超音波診断システムの作動方法 | |
| JP7041014B2 (ja) | 超音波診断装置、及び、超音波診断装置の作動方法 | |
| US20240201350A1 (en) | Ultrasound endoscope system and operation method of ultrasound endoscope system | |
| JP7301114B2 (ja) | 超音波診断装置、及び、超音波診断装置の作動方法 | |
| JP2022066545A (ja) | 超音波診断装置、及び、超音波診断装置の作動方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220124 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220606 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20221116 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20221213 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230125 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230418 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230609 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230912 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230921 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7355804 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |