JP2020184840A - モータ制御装置 - Google Patents
モータ制御装置 Download PDFInfo
- Publication number
- JP2020184840A JP2020184840A JP2019088390A JP2019088390A JP2020184840A JP 2020184840 A JP2020184840 A JP 2020184840A JP 2019088390 A JP2019088390 A JP 2019088390A JP 2019088390 A JP2019088390 A JP 2019088390A JP 2020184840 A JP2020184840 A JP 2020184840A
- Authority
- JP
- Japan
- Prior art keywords
- motor
- duty
- energization
- limit value
- coil
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images













Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P29/00—Arrangements for regulating or controlling electric motors, appropriate for both AC and DC motors
- H02P29/02—Providing protection against overload without automatic interruption of supply
- H02P29/024—Detecting a fault condition, e.g. short circuit, locked rotor, open circuit or loss of load
- H02P29/027—Detecting a fault condition, e.g. short circuit, locked rotor, open circuit or loss of load the fault being an over-current
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/26—Generation or transmission of movements for final actuating mechanisms
- F16H61/28—Generation or transmission of movements for final actuating mechanisms with at least one movement of the final actuating mechanism being caused by a non-mechanical force, e.g. power-assisted
- F16H61/32—Electric motors , actuators or related electrical control means therefor
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/08—Arrangements for controlling the speed or torque of a single motor
- H02P6/085—Arrangements for controlling the speed or torque of a single motor in a bridge configuration
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/26—Generation or transmission of movements for final actuating mechanisms
- F16H61/28—Generation or transmission of movements for final actuating mechanisms with at least one movement of the final actuating mechanism being caused by a non-mechanical force, e.g. power-assisted
- F16H61/32—Electric motors , actuators or related electrical control means therefor
- F16H2061/326—Actuators for range selection, i.e. actuators for controlling the range selector or the manual range valve in the transmission
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H63/00—Control outputs from the control unit to change-speed- or reversing-gearings for conveying rotary motion or to other devices than the final output mechanism
- F16H63/02—Final output mechanisms therefor; Actuating means for the final output mechanisms
- F16H63/30—Constructional features of the final output mechanisms
- F16H63/34—Locking or disabling mechanisms
- F16H63/3416—Parking lock mechanisms or brakes in the transmission
- F16H63/3458—Parking lock mechanisms or brakes in the transmission with electric actuating means, e.g. shift by wire
- F16H63/3466—Parking lock mechanisms or brakes in the transmission with electric actuating means, e.g. shift by wire using electric motors
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H63/00—Control outputs from the control unit to change-speed- or reversing-gearings for conveying rotary motion or to other devices than the final output mechanism
- F16H63/02—Final output mechanisms therefor; Actuating means for the final output mechanisms
- F16H63/30—Constructional features of the final output mechanisms
- F16H63/38—Detents
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Mechanical Engineering (AREA)
- Control Of Motors That Do Not Use Commutators (AREA)
- Control Of Ac Motors In General (AREA)
- Control Of Electric Motors In General (AREA)
Abstract
Description
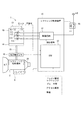
第1実施形態を図1〜図10に示す。図1および図2に示すように、シフトバイワイヤシステム1は、モータ10、シフトレンジ切替機構20、パーキングロック機構30、および、シフトレンジ制御装置40等を備える。
Dlim_h=Dlim_hr×K1 ・・・(2)
第2実施形態を図11および図12に示す。本実施形態では、所定のデューティでの固定相通電を行ったときの電流に基づいてデューティ制限値Dlim_l、Dlim_hの補正に用いる補正係数K2を演算する。
第3実施形態を図13〜図15に示す。本実施形態では、所定のデューティにてモータ10を回転させたときの電流に基づいてデューティ制限値Dlim_l、Dlim_hの補正に用いる補正係数K3を演算する。
上記実施形態では、モータは、永久磁石式の3相ブラシレスモータである。他の実施形態では、モータは、3相ブラシレスモータに限らず、SRモータ等を用いてもよい。上記実施形態では、コイルおよび駆動回路が1組である。他の実施形態では、コイルおよび駆動回路が2組以上であってもよい。
10・・・モータ 11・・・コイル
20・・・シフトレンジ切替機構
40・・・シフトレンジ制御装置(モータ制御装置)
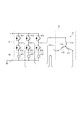
41・・・駆動回路 411〜416・・・スイッチング素子
50・・・ECU(制御部)
62・・・デューティ制限値演算部(電流制限部)
65・・・通電制御部
Claims (6)
- コイル(11)を有するモータ(10)の駆動を制御するモータ制御装置であって、
複数のスイッチング素子(411〜416)を有し、前記コイルへの通電を切り替える駆動回路(41)と、
前記モータを加速させた後、減速させ、前記モータの回転位置が目標回転位置にて停止するように、前記コイルへの通電を制御する通電制御部(65)、および、減速制御時における電流を制限する電流制限部(62)を有する制御部(50)と、
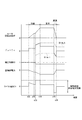
を備えるモータ制御装置。 - 前記電流制限部は、PWM制御におけるデューティ比を制限するデューティ制限値を演算するものであって、
PWM制御におけるデューティ比について、前記スイッチング素子のオン時間の割合を絶対値とし、減速制御開始前と同じ方向にトルクを発生させるときのデューティ比を正、減速制御開始前と反対方向にトルクを発生させるときのデューティ比を負として定義するとき、
前記デューティ制限値は、低速回転域において負であって、前記モータの回転速度が大きくなるほど大きくなるように演算される請求項1に記載のモータ制御装置。 - 前記デューティ制限値は、前記駆動回路に入力される入力電圧に応じて補正される請求項2に記載のモータ制御装置。
- 前記デューティ制限値は、前記モータの駆動を開始する前に一定のデューティ比での固定相通電を行ったときの電流に応じて補正される請求項2に記載のモータ制御装置。
- 前記デューティ制限値は、前記モータの駆動中であって、減速制御開始前に一定のデューティ比での通電を行ったときの電流に応じて補正される請求項2に記載のモータ制御装置。
- コイル(11)を有するモータ(10)の駆動を制御するモータ制御装置であって、
複数のスイッチング素子を有し、前記コイルへの通電を切り替える駆動回路(41)と、
前記モータを加速させた後、減速させ、前記モータの回転位置が目標回転位置にて停止するように、デューティ比を変更することで前記コイルへの通電を制御する通電制御部(65)、および、デューティ比を制限するデューティ制限値を演算する電流制限部(62)を有する制御部(50)と、
を備え、
前記デューティ制限値は、減速制御開始前に一定のデューティ比での通電を行ったときの電流に応じて補正されるモータ制御装置。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019088390A JP7230674B2 (ja) | 2019-05-08 | 2019-05-08 | モータ制御装置 |
| CN202080032244.1A CN113748596B (zh) | 2019-05-08 | 2020-05-07 | 马达控制装置 |
| PCT/JP2020/018550 WO2020226156A1 (ja) | 2019-05-08 | 2020-05-07 | モータ制御装置 |
| DE112020002260.9T DE112020002260T5 (de) | 2019-05-08 | 2020-05-07 | Motorsteuervorrichtung |
| US17/518,880 US11996794B2 (en) | 2019-05-08 | 2021-11-04 | Motor control device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019088390A JP7230674B2 (ja) | 2019-05-08 | 2019-05-08 | モータ制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020184840A true JP2020184840A (ja) | 2020-11-12 |
| JP7230674B2 JP7230674B2 (ja) | 2023-03-01 |
Family
ID=73045238
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019088390A Active JP7230674B2 (ja) | 2019-05-08 | 2019-05-08 | モータ制御装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11996794B2 (ja) |
| JP (1) | JP7230674B2 (ja) |
| CN (1) | CN113748596B (ja) |
| DE (1) | DE112020002260T5 (ja) |
| WO (1) | WO2020226156A1 (ja) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002325492A (ja) * | 2001-04-25 | 2002-11-08 | Fuji Electric Co Ltd | 電圧形インバータの回生制限装置 |
| JP2005525202A (ja) * | 2002-05-15 | 2005-08-25 | エルジー エレクトロニクス インコーポレーテッド | モータ駆動洗濯機の制御方法、及び制御装置 |
| JP2018135919A (ja) * | 2017-02-21 | 2018-08-30 | 株式会社デンソー | シフトレンジ制御装置 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3713606A (en) * | 1971-01-25 | 1973-01-30 | Ibm | Magnetic tape unit capstan and reel motor control apparatus |
| JPH0580856A (ja) | 1991-09-20 | 1993-04-02 | Canon Inc | モータ制御装置 |
| US6653811B2 (en) * | 2001-08-08 | 2003-11-25 | A. O. Smith Corporation | Switched reluctance motor and method and apparatus for aligning the rotor thereof |
| WO2003097921A1 (en) | 2002-05-16 | 2003-11-27 | Lg Electronics Inc. | Apparatus and method for detecting malfunction of a clutch of washing machine |
| US7161314B2 (en) * | 2002-10-07 | 2007-01-09 | Denso Corporation | Motor control apparatus having current supply phase correction |
| EP2555415A1 (en) * | 2010-03-29 | 2013-02-06 | Toyota Jidosha Kabushiki Kaisha | Electric power steering system |
| JP6052028B2 (ja) * | 2013-04-03 | 2016-12-27 | 株式会社デンソー | モータ制御装置 |
| JP6362349B2 (ja) * | 2014-02-19 | 2018-07-25 | 日立オートモティブシステムズ株式会社 | 電動モータの駆動制御装置 |
| JP6398782B2 (ja) * | 2015-02-25 | 2018-10-03 | 株式会社デンソー | モータ制御装置 |
| JP6545064B2 (ja) * | 2015-09-30 | 2019-07-17 | 株式会社マキタ | モータの制御装置 |
| JP6884561B2 (ja) * | 2016-11-29 | 2021-06-09 | 株式会社マキタ | 電動作業機 |
| JP7077583B2 (ja) | 2017-11-13 | 2022-05-31 | 株式会社大林組 | 除菌方法及び除菌装置 |
-
2019
- 2019-05-08 JP JP2019088390A patent/JP7230674B2/ja active Active
-
2020
- 2020-05-07 WO PCT/JP2020/018550 patent/WO2020226156A1/ja not_active Ceased
- 2020-05-07 CN CN202080032244.1A patent/CN113748596B/zh active Active
- 2020-05-07 DE DE112020002260.9T patent/DE112020002260T5/de active Pending
-
2021
- 2021-11-04 US US17/518,880 patent/US11996794B2/en active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002325492A (ja) * | 2001-04-25 | 2002-11-08 | Fuji Electric Co Ltd | 電圧形インバータの回生制限装置 |
| JP2005525202A (ja) * | 2002-05-15 | 2005-08-25 | エルジー エレクトロニクス インコーポレーテッド | モータ駆動洗濯機の制御方法、及び制御装置 |
| JP2018135919A (ja) * | 2017-02-21 | 2018-08-30 | 株式会社デンソー | シフトレンジ制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7230674B2 (ja) | 2023-03-01 |
| DE112020002260T5 (de) | 2022-01-20 |
| US20220060138A1 (en) | 2022-02-24 |
| CN113748596B (zh) | 2023-10-31 |
| US11996794B2 (en) | 2024-05-28 |
| WO2020226156A1 (ja) | 2020-11-12 |
| CN113748596A (zh) | 2021-12-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6801551B2 (ja) | シフトレンジ制御装置 | |
| JP6531707B2 (ja) | シフトレンジ制御装置 | |
| JP6569584B2 (ja) | シフトレンジ制御装置 | |
| JP6862906B2 (ja) | シフトレンジ制御装置 | |
| JP6658416B2 (ja) | シフトレンジ制御装置 | |
| JP6607213B2 (ja) | シフトレンジ制御装置 | |
| WO2017179337A1 (ja) | シフトレンジ制御装置 | |
| WO2019098317A1 (ja) | シフトレンジ切替システム | |
| US11084493B2 (en) | Shift range control device | |
| JP7115339B2 (ja) | シフトレンジ制御装置 | |
| JP6992481B2 (ja) | モータ制御装置 | |
| WO2019176849A1 (ja) | シフトレンジ制御装置 | |
| WO2019131331A1 (ja) | シフトレンジ制御装置 | |
| US11996794B2 (en) | Motor control device | |
| WO2017208682A1 (ja) | シフトレンジ制御装置 | |
| US20220190750A1 (en) | Motor control device | |
| WO2020045146A1 (ja) | シフトレンジ制御装置 | |
| JP7067382B2 (ja) | シフトレンジ制御装置 | |
| JP2019033620A (ja) | モータ制御装置 | |
| JP2021166426A (ja) | モータ制御装置 | |
| WO2021039504A1 (ja) | シフトレンジ制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210518 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220712 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220901 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230117 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230130 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 7230674 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |