JP2020157402A - ロボット制御装置、ロボットの制御方法、およびロボットシステム - Google Patents
ロボット制御装置、ロボットの制御方法、およびロボットシステム Download PDFInfo
- Publication number
- JP2020157402A JP2020157402A JP2019057543A JP2019057543A JP2020157402A JP 2020157402 A JP2020157402 A JP 2020157402A JP 2019057543 A JP2019057543 A JP 2019057543A JP 2019057543 A JP2019057543 A JP 2019057543A JP 2020157402 A JP2020157402 A JP 2020157402A
- Authority
- JP
- Japan
- Prior art keywords
- range
- control signal
- control
- frequency
- robot
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034 method Methods 0.000 title claims description 55
- 230000009467 reduction Effects 0.000 claims abstract description 59
- 230000007274 generation of a signal involved in cell-cell signaling Effects 0.000 claims abstract description 35
- 238000003860 storage Methods 0.000 claims abstract description 6
- 230000008859 change Effects 0.000 claims description 39
- 230000008569 process Effects 0.000 claims description 10
- 238000012545 processing Methods 0.000 abstract description 69
- 239000012636 effector Substances 0.000 description 25
- 230000036544 posture Effects 0.000 description 22
- 238000011946 reduction process Methods 0.000 description 17
- 238000010586 diagram Methods 0.000 description 11
- 230000000694 effects Effects 0.000 description 9
- 230000006870 function Effects 0.000 description 9
- 238000005452 bending Methods 0.000 description 7
- 230000001133 acceleration Effects 0.000 description 6
- 238000005259 measurement Methods 0.000 description 6
- WBMKMLWMIQUJDP-STHHAXOLSA-N (4R,4aS,7aR,12bS)-4a,9-dihydroxy-3-prop-2-ynyl-2,4,5,6,7a,13-hexahydro-1H-4,12-methanobenzofuro[3,2-e]isoquinolin-7-one hydrochloride Chemical compound Cl.Oc1ccc2C[C@H]3N(CC#C)CC[C@@]45[C@@H](Oc1c24)C(=O)CC[C@@]35O WBMKMLWMIQUJDP-STHHAXOLSA-N 0.000 description 5
- 238000004519 manufacturing process Methods 0.000 description 5
- 230000015654 memory Effects 0.000 description 5
- 230000000903 blocking effect Effects 0.000 description 4
- 238000004590 computer program Methods 0.000 description 4
- 238000012937 correction Methods 0.000 description 4
- 239000008186 active pharmaceutical agent Substances 0.000 description 3
- 230000007423 decrease Effects 0.000 description 2
- 238000013461 design Methods 0.000 description 2
- 239000004973 liquid crystal related substance Substances 0.000 description 2
- NJPPVKZQTLUDBO-UHFFFAOYSA-N novaluron Chemical compound C1=C(Cl)C(OC(F)(F)C(OC(F)(F)F)F)=CC=C1NC(=O)NC(=O)C1=C(F)C=CC=C1F NJPPVKZQTLUDBO-UHFFFAOYSA-N 0.000 description 2
- 230000000052 comparative effect Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000001914 filtration Methods 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000004043 responsiveness Effects 0.000 description 1
Images










Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1628—Programme controls characterised by the control loop
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/0081—Programme-controlled manipulators with master teach-in means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/08—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices
- B25J13/085—Force or torque sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/08—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices
- B25J13/088—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices with position, velocity or acceleration sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/10—Programme-controlled manipulators characterised by positioning means for manipulator elements
- B25J9/12—Programme-controlled manipulators characterised by positioning means for manipulator elements electric
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1602—Programme controls characterised by the control system, structure, architecture
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1679—Programme controls characterised by the tasks executed
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/39—Robotics, robotics to robotics hand
- G05B2219/39195—Control, avoid oscillation, vibration due to low rigidity
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/41—Servomotor, servo controller till figures
- G05B2219/41166—Adaptive filter frequency as function of oscillation, rigidity, inertia load
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Human Computer Interaction (AREA)
- Automation & Control Theory (AREA)
- Manipulator (AREA)
- Numerical Control (AREA)
Abstract
Description
A1.ロボットシステムの構成:
図1は、本実施形態のロボットシステムを示す説明図である。本実施形態のロボットシステムは、ロボット100と、エンドエフェクター200と、ロボット制御装置300と、教示装置600と、を備える。
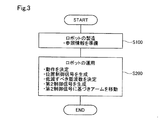
図3は、本実施形態のロボットシステム1の運用の流れを示すフローチャートである。本実施形態のロボットシステム1の運用においては、まずステップS100において、ロボットが製造される。その際、ロボット100の制御点TCPの位置の範囲と、振動低減処理において低減すべき周波数と、の1以上の組み合わせの情報を含む参照情報306が生成される。参照情報306は、RAM302に格納される(図1参照)。すなわち、参照情報306は、ステップS200のロボット100の運用に先だって、準備される。
第2実施形態においては、図3のステップS200における、振動低減処理において低減すべき周波数の決定方法が、第1実施形態とは異なる。具体的には、動作においてアーム110が先端170において支持する物体の質量を考慮して、振動低減処理において低減すべき周波数が補正される。第2実施形態の他の点は、第1実施形態と同じである。
図13は、複数のプロセッサーによってロボットの制御装置が構成される一例を示す概念図である。この例では、ロボット100およびそのロボット制御装置300の他に、パーソナルコンピューター400,400bと、LANなどのネットワーク環境を介して提供されるクラウドサービス500とが描かれている。パーソナルコンピューター400,400bは、それぞれプロセッサーとメモリーとを含んでいる。また、クラウドサービス500においてもプロセッサーとメモリーを利用可能である。プロセッサーは、コンピューター実行可能な命令を実行する。これらの複数のプロセッサーの一部または全部を利用して、ロボット制御装置300および教示装置600を含む制御装置を実現することが可能である。また、各種の情報を記憶する記憶部も、これらの複数のメモリーの一部または全部を利用して、実現することが可能である。
図14は、複数のプロセッサーによってロボットの制御装置が構成される他の例を示す概念図である。この例では、ロボット100のロボット制御装置300が、ロボット100の中に格納されている点が図13と異なる。この例においても、複数のプロセッサーの一部または全部を利用して、ロボット100の制御装置を実現することが可能である。また、各種の情報を記憶する記憶部も、複数のメモリーの一部または全部を利用して、実現することが可能である。
本開示は、上述した実施形態に限られるものではなく、その趣旨を逸脱しない範囲において種々の形態で実現することができる。例えば、本開示は、以下の形態によっても実現可能である。以下に記載した各形態中の技術的特徴に対応する上記実施形態中の技術的特徴は、本開示の課題の一部又は全部を解決するために、あるいは、本開示の効果の一部又は全部を達成するために、適宜、差し替えや、組み合わせを行うことが可能である。また、その技術的特徴が本明細書中に必須なものとして説明されていなければ、適宜、削除することが可能である。
(1)上記実施形態においては、関節X12の位置を基準点O2として、位置の範囲Ar0,Ar1,Ar2が定められている(図4参照)。しかし、参照情報において低減すべき周波数と対応づけられる位置の範囲は、他の点を基準として定められることもできる。ただし、参照情報において低減すべき周波数と対応づけられる位置の範囲は、ロボットにおいて可動部としてのアームを支持する基台に最も近い曲げ関節の位置を中心とする範囲であることが好ましい。そのような態様とすることにより、よりアームの先端に近い関節の位置を基準点とする態様に比べて、アームに発生する様々な固有振動数の振動を、有効に低減することができる。
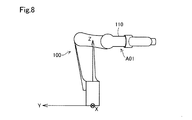
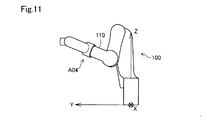
上記実施形態においては、制御点TCPは、ロボット100のアーム110の先端170にある(図1参照)。しかし、ロボットの制御点は、たとえば、アームの先端から基台側の位置など、可動部としてのアームの先端からずれた位置に配することもできる。
上記実施形態においては、F11,F21の周波数±Δfの範囲の周波数成分が、低減される。Δfは1Hzである。しかし、特定の周波数の成分とともに低減されるその前後の周波数の幅は、0.5Hzや2Hzなど、他の値でもよい。また、特定の周波数の成分とともに低減されるその前後の周波数の幅は、特定の周波数の成分ごとに異なっていてもよい。
上記実施形態においては、「種類」の欄が「通常」に設定されている場合には、フィルター設定部345(図2参照)は、振動低減処理において低減すべき周波数として、動作の終点が属する位置の範囲に対応づけられた周波数を、決定する(図6の番号1参照)。そして、「種類」の欄は、デフォルトでは、「通常」に設定される。しかし、振動低減処理において低減すべき周波数として、動作の終点が属する位置の範囲に対応づけられた周波数を、デフォルトとしない態様とすることもできる。そして、振動低減処理において低減すべき周波数として、動作の終点が属する位置の範囲に対応づけられた周波数を、決定せず、他の周波数を決定する態様とすることもできる。たとえば、振動低減処理において低減すべき周波数として、動作の始点が属する位置の範囲に対応づけられた周波数のみを、決定してもよい。また、振動低減処理において低減すべき周波数として、速度が変更される変更点が属する位置の範囲に対応づけられた周波数のみを、決定してもよい。
上記実施形態においては、フィルター処理部340(図2参照)は、動作Op10を指示する第1制御信号CS1から、参照情報306において第2範囲Ar2と対応づけられている周波数F21の成分と、第1範囲Ar1と対応づけられている周波数F11の成分と、を低減して、第2制御信号CS2を生成する(図6の番号2欄のParam1,Param2参照)。
(1)上記実施形態においては、「種類」の欄が「境界切替え」に設定されている場合には、フィルター処理部340は、第1制御信号CS1のうち、制御点TCPが第1範囲Ar1内を移動する第1部分動作Op11を指示する部分について、参照情報306において第1範囲Ar1と対応づけられている周波数F11の成分を低減する(図4および図6参照)。そして、フィルター処理部340は、第1制御信号CS1のうち、制御点TCPが第2範囲Ar2内を移動する第2部分動作Op12を指示する部分について、参照情報306において第2範囲Ar2と対応づけられている周波数F21の成分を低減する。このような位置の範囲の境界における切換は、ある動作が3以上の位置の範囲内を通る場合についても、実行されることができる。
(1)上記実施形態においては、「種類」の欄が「変更点切替え」に設定されている場合には、フィルター処理部340は、第1制御信号CS1のうち、制御点TCPが変更点P23に達する前の動作である第1部分動作Op21を指示する部分について、参照情報306において第1範囲Ar1と対応づけられている周波数F11の成分を低減する。フィルター処理部340は、第1制御信号CS1のうち、制御点TCPが変更点P23に達した後の動作である第2部分動作Op22を指示する部分について、参照情報306において第2範囲Ar2と対応づけられている周波数F21の成分を低減する。変更点P23は、第2範囲Ar2内にある。
上記実施形態において、動作Op30は、第1範囲Ar1内の位置P31から、非低減範囲Ar0内の位置P32に、制御点TCPが移動する動作である(図4の下段右部参照)。このように、参照情報を使用した振動低減処理を行わない動作は、動作Op30のように、動作の一部において、非低減範囲を通過する動作であってもよい。また、参照情報を使用した振動低減処理を行わない動作は、非低減範囲内のみを制御点が移動する動作としてもよい。
上記実施形態においては、非低減範囲Ar0には、基台180が含まれる(図4参照)。しかし、周波数と対応づけられていないロボットの制御点の位置の範囲である非低減範囲は、基台の一部を含まない範囲とすることもでき、基台の全部を含まない範囲とすることもできる。また、非低減範囲を有さない参照情報を作成することもできる。
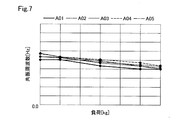
第2実施形態においては、フィルター設定部345は、参照情報306(図1および図5参照)を参照して得られた周波数を、支持する物の質量の増加に対して、線形に減少するように、補正する(図7参照)。しかし、参照情報を参照して得られた周波数は、たとえば、上に凸または下に凸の2次曲線的に補正されるなど、他の方法で補正されることもできる。
本開示は、上述した実施形態に限られるものではなく、その趣旨を逸脱しない範囲において種々の形態で実現することができる。例えば、本開示は、以下の形態(aspect)によっても実現可能である。以下に記載した各形態中の技術的特徴に対応する上記実施形態中の技術的特徴は、本開示の課題の一部又は全部を解決するために、あるいは、本開示の効果の一部又は全部を達成するために、適宜、差し替えや、組み合わせを行うことが可能である。また、その技術的特徴が本明細書中に必須なものとして説明されていなければ、適宜、削除することが可能である。
このような態様とすれば、新たに教示した動作についてロボットの共振周波数を測定することなく、その動作について、振動を低減できる駆動信号を生成してロボットに出力することができる。このため、ロボットの制御点の位置の範囲と周波数成分との組み合わせの情報を含む参照情報を使用した第2制御信号の生成を行わない制御装置に比べて、複数の動作について振動を低減する際のユーザーの負荷を低減することができる。
このような態様とすれば、ロボットの設計情報に基づいて参照情報を生成して、その参照情報に基づいて有効にロボットの振動を低減することができる。
このような態様とすれば、第2制御信号生成部が低減する周波数の範囲が重複する態様に比べて、共振周波数となり得る周波数の範囲について、より少ない数の位置の範囲の区分で、効率的に振動を低減できるように、参照情報を生成することができる。
このような態様とすれば、第1制御信号で指示される動作が終了した後の残留振動を、効果的に低減できる、第2制御信号を生成することができる。
このような態様とすれば、さらに、制御点が第1範囲を移動しているときの制御点の振動を、効果的に低減できる、第2制御信号を生成することができる。
このような態様とすれば、第1範囲と対応づけられている周波数の成分と第2範囲と対応づけられている周波数の成分との両方を、一貫して低減する態様に比べて、位置ずれを少なくしつつ、第1制御信号が指示する動作のうちの第1部分動作について、振動を効果的に低減することができ、第2部分動作についても、振動を効果的に低減することができる。
このような態様とすれば、第1範囲と対応づけられている周波数の成分と第2範囲と対応づけられている周波数の成分との両方を、一貫して低減する態様に比べて、位置ずれを少なくしつつ、第1制御信号が指示する動作のうちの第1部分動作について、振動を効果的に低減することができ、第2部分動作についても、振動を効果的に低減することができる。
このような態様とすれば、制御点がどのような位置範囲にある動作についても、第1制御信号から周波数の成分を低減する態様に比べて、制御点が非低減範囲内を移動する動作における位置精度を向上させることができる。
このような態様においては、制御点が可動部を支持している基台の近傍にあり、可動部が折り畳まれている姿勢をとる動作の第1制御信号については、周波数の成分が低減されることなく、第2制御信号が生成される。このため、可動部が折り畳まれており、振動しにくいと考えられる動作について、振動による不利益を被ることなく、または少ない不利益で、位置精度を向上させることができる。
このような態様とすれば、可動部が支持する物の質量を考慮せずに、第1制御信号から低減すべき周波数の成分を決定する態様に比べて、より高度にロボットの動作の振動を低減することができる。
Claims (21)
- ロボットを制御するための制御装置であって、
ロボットの可動部を移動させる動作を行うための第1制御信号から、あらかじめ定められた周波数の成分を低減して第2制御信号を生成することができる第2制御信号生成部と、
前記ロボットの制御点の位置の範囲と周波数との組み合わせの情報を含む参照情報を記憶している記憶部と、を備え、
前記第2制御信号生成部は、前記動作における前記ロボットの制御点の位置に基づいて、前記参照情報を参照して、前記第1制御信号から低減すべき周波数の成分を決定する、制御装置。 - 請求項1記載の制御装置であって、
前記制御点は、前記可動部の両端のうち、前記可動部を支持する基台と接続されている端とは逆の端にある、制御装置。 - 請求項1または2記載の制御装置であって、
前記第2制御信号生成部は、前記決定した周波数を含むあらかじめ定められた幅の周波数の範囲の成分を、前記第1制御信号から低減して、前記第2制御信号を生成し、
前記参照情報は、前記ロボットの制御点の位置の範囲と周波数との2以上の組み合わせの情報を含み、
前記参照情報において、任意の二つの前記位置の範囲は、それぞれ対応づけられた前記周波数を含む前記周波数の範囲が互いに重複しないように設定されている、制御装置。 - 請求項1から3のいずれか1項に記載の制御装置であって、
前記参照情報は、
周波数と対応づけられた位置の範囲である第1範囲と、
周波数と対応づけられた位置の範囲であって前記第1範囲とは異なる第2範囲と、の情報を含み、
前記第2制御信号生成部は、前記第1範囲内の位置から前記第2範囲内の位置に前記制御点が移動する動作を指示する前記第1制御信号から、前記参照情報において前記第2範囲と対応づけられている周波数の成分を低減して、前記第2制御信号を生成する、制御装置。 - 請求項4記載の制御装置であって、
前記第2制御信号生成部は、前記第1制御信号から、さらに、前記参照情報において前記第1範囲と対応づけられている周波数の成分を低減して、前記第2制御信号を生成する、制御装置。 - 請求項1から3のいずれか1項に記載の制御装置であって、
前記参照情報は、
周波数と対応づけられた位置の範囲である第1範囲と、
周波数と対応づけられた位置の範囲であって前記第1範囲とは異なる第2範囲と、の情報を含み、
前記第2制御信号生成部は、前記第1範囲内の位置から前記第2範囲内の位置に前記制御点が移動する動作を指示する前記第1制御信号から、前記第2制御信号を生成する際に、
前記第1制御信号のうち、前記制御点が前記第1範囲内を移動する第1部分動作を指示する部分について、前記参照情報において前記第1範囲と対応づけられている周波数の成分を低減し、
前記第1制御信号のうち、前記制御点が前記第2範囲内を移動する第2部分動作を指示する部分について、前記参照情報において前記第2範囲と対応づけられている周波数の成分を低減する、制御装置。 - 請求項1から3のいずれか1項に記載の制御装置であって、
前記参照情報は、
周波数と対応づけられた位置の範囲である第1範囲と、
周波数と対応づけられた位置の範囲であって前記第1範囲とは異なる第2範囲と、の情報を含み、
前記第2制御信号生成部は、前記第1範囲内の位置から前記第2範囲内の位置に前記制御点が移動する動作であって、前記第2範囲内のあらかじめ定められた変更点において前記制御点の速度を変えて移動する動作を指示する前記第1制御信号から、前記第2制御信号を生成する際に、
前記第1制御信号のうち、前記制御点が前記変更点に達する前の動作である第1部分動作を指示する部分について、前記参照情報において前記第1範囲と対応づけられている周波数の成分を低減し、
前記第1制御信号のうち、前記制御点が前記変更点に達した後の動作である第2部分動作を指示する部分について、前記参照情報において前記第2範囲と対応づけられている周波数の成分を低減する、制御装置。 - 請求項1から7のいずれか1項に記載の制御装置であって、
前記参照情報は、さらに、周波数と対応づけられていない前記ロボットの制御点の位置の範囲である非低減範囲の情報を含み、
前記第2制御信号生成部は、前記制御点が前記非低減範囲を移動する動作を指示する前記第1制御信号から、周波数の成分を低減することなく、前記第2制御信号を生成することができる、制御装置。 - 請求項8記載の制御装置であって、
前記非低減範囲は、前記可動部を支持する基台の少なくとも一部を含む範囲である、制御装置。 - 請求項1から9のいずれか1項に記載の制御装置であって、
前記第2制御信号生成部は、前記可動部が支持する物の質量の情報に基づいて、前記質量が大きいほど、前記第1制御信号から低減すべき周波数の成分が小さくなるように、前記第1制御信号から低減すべき周波数の成分を決定する、制御装置。 - ロボットを制御する制御方法であって、
(a)ロボットの制御点の位置の範囲と周波数との組み合わせの情報を含む参照情報を準備する工程と、
(b)動作における前記ロボットの制御点の位置に基づいて、前記参照情報を参照して、前記ロボットの可動部を移動させる動作を行うための第1制御信号から低減すべき周波数の成分を決定する工程と、
(c)前記第1制御信号から、前記決定された周波数の成分を低減して第2制御信号を生成する工程と、
(d)前記第2制御信号に基づいて、前記ロボットを駆動する駆動信号を生成する工程と、
を含む、制御方法。 - 請求項11記載の制御方法であって、
前記制御点は、前記可動部の両端のうち、前記可動部を支持する基台と接続されている端とは逆の端にある、制御方法。 - 請求項11または12記載の制御方法であって、
前記工程(c)は、前記決定された周波数を含むあらかじめ定められた幅の周波数の範囲の成分を、前記第1制御信号から低減して、前記第2制御信号を生成する工程であり、
前記工程(a)は、前記ロボットの制御点の位置の範囲と周波数との2以上の組み合わせの情報を含み、任意の二つの前記位置の範囲は、それぞれ対応づけられた前記周波数を含む前記周波数の範囲が互いに重複しないように設定されている、前記参照情報を準備する工程である、制御方法。 - 請求項11から13のいずれか1項に記載の制御方法であって、
前記参照情報は、
周波数と対応づけられた位置の範囲である第1範囲と、
周波数と対応づけられた位置の範囲であって前記第1範囲とは異なる第2範囲と、の情報を含み、
前記工程(c)は、前記第1範囲内の位置から前記第2範囲内の位置に前記制御点が移動する動作を指示する前記第1制御信号から、前記参照情報において前記第2範囲と対応づけられている周波数の成分を低減して、前記第2制御信号を生成する工程である、制御方法。 - 請求項14記載の制御方法であって、
前記工程(c)は、前記第1制御信号から、さらに、前記参照情報において前記第1範囲と対応づけられている周波数の成分を低減して、前記第2制御信号を生成する工程である、制御方法。 - 請求項11から13のいずれか1項に記載の制御方法であって、
前記参照情報は、
周波数と対応づけられた位置の範囲である第1範囲と、
周波数と対応づけられた位置の範囲であって前記第1範囲とは異なる第2範囲と、の情報を含み、
前記工程(c)は、前記第1範囲内の位置から前記第2範囲内の位置に前記制御点が移動する動作を指示する前記第1制御信号から、前記第2制御信号を生成する際に、
前記第1制御信号のうち、前記制御点が前記第1範囲内を移動する第1部分動作を指示する部分について、前記参照情報において前記第1範囲と対応づけられている周波数の成分を低減し、
前記第1制御信号のうち、前記制御点が前記第2範囲内を移動する第2部分動作を指示する部分について、前記参照情報において前記第2範囲と対応づけられている周波数の成分を低減する工程である、制御方法。 - 請求項11から13のいずれか1項に記載の制御方法であって、
前記参照情報は、
周波数と対応づけられた位置の範囲である第1範囲と、
周波数と対応づけられた位置の範囲であって前記第1範囲とは異なる第2範囲と、の情報を含み、
前記工程(c)は、前記第1範囲内の位置から前記第2範囲内の位置に前記制御点が移動する動作であって、前記第2範囲内のあらかじめ定められた変更点において前記制御点の速度を変えて移動する動作を指示する前記第1制御信号から、前記第2制御信号を生成する際に、
前記第1制御信号のうち、前記制御点が前記変更点に達する前の動作である第1部分動作を指示する部分について、前記参照情報において前記第1範囲と対応づけられている周波数の成分を低減し、
前記第1制御信号のうち、前記制御点が前記変更点に達した後の動作である第2部分動作を指示する部分について、前記参照情報において前記第2範囲と対応づけられている周波数の成分を低減する工程である、制御方法。 - 請求項11から17のいずれか1項に記載の制御方法であって、
前記参照情報は、さらに、周波数と対応づけられていない前記ロボットの制御点の位置の範囲である非低減範囲の情報を含み、
前記工程(c)は、前記制御点が前記非低減範囲を移動する動作を指示する前記第1制御信号から、周波数の成分を低減することなく、前記第2制御信号を生成する工程を含む、制御方法。 - 請求項18記載の制御方法であって、
前記非低減範囲は、前記可動部を支持する基台の少なくとも一部を含む範囲である、制御方法。 - 請求項11から19のいずれか1項に記載の制御方法であって、
前記工程(b)は、前記可動部が支持する物の質量の情報に基づいて、前記質量が大きいほど、前記第1制御信号から低減すべき周波数の成分が小さくなるように、前記第1制御信号から低減すべき周波数の成分を決定する工程である、制御方法。 - 請求項1から10のいずれか1項に記載の制御装置と、
前記制御装置によって制御されるロボットと、
を備えるロボットシステム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019057543A JP2020157402A (ja) | 2019-03-26 | 2019-03-26 | ロボット制御装置、ロボットの制御方法、およびロボットシステム |
| CN202010213963.5A CN111745621B (zh) | 2019-03-26 | 2020-03-24 | 机器人控制装置、机器人的控制方法及机器人系统 |
| US16/829,103 US11465280B2 (en) | 2019-03-26 | 2020-03-25 | Robot control device, robot control method, and robot system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019057543A JP2020157402A (ja) | 2019-03-26 | 2019-03-26 | ロボット制御装置、ロボットの制御方法、およびロボットシステム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020157402A true JP2020157402A (ja) | 2020-10-01 |
| JP2020157402A5 JP2020157402A5 (ja) | 2022-02-01 |
Family
ID=72607109
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019057543A Pending JP2020157402A (ja) | 2019-03-26 | 2019-03-26 | ロボット制御装置、ロボットの制御方法、およびロボットシステム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US11465280B2 (ja) |
| JP (1) | JP2020157402A (ja) |
| CN (1) | CN111745621B (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7007839B2 (ja) * | 2017-08-31 | 2022-01-25 | 川崎重工業株式会社 | 多関節ロボット |
| JP7487479B2 (ja) * | 2020-01-23 | 2024-05-21 | セイコーエプソン株式会社 | 移動ロボットの制御方法 |
| TWI728762B (zh) * | 2020-03-27 | 2021-05-21 | 財團法人工業技術研究院 | 減低機械手臂振動之方法 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03223907A (ja) * | 1990-01-30 | 1991-10-02 | Citizen Watch Co Ltd | コンプライアアンス機構を有するロボットの制御方法 |
| JPH0425390A (ja) * | 1990-05-20 | 1992-01-29 | Fujitsu Ltd | ロボット制御装置 |
| JP2011110630A (ja) * | 2009-11-24 | 2011-06-09 | Yaskawa Electric Corp | ロボット制御装置 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001293638A (ja) | 2000-02-10 | 2001-10-23 | Fanuc Ltd | 制御装置 |
| US6507165B2 (en) | 2000-02-10 | 2003-01-14 | Fanuc Ltd. | Controller for machine |
| JP2007272597A (ja) | 2006-03-31 | 2007-10-18 | Yaskawa Electric Corp | ロボットの加減速パターン生成方法 |
| JP5645564B2 (ja) * | 2010-09-14 | 2014-12-24 | キヤノン株式会社 | センサ装置及びロボット装置 |
| KR20150091346A (ko) * | 2012-11-30 | 2015-08-10 | 어플라이드 머티어리얼스, 인코포레이티드 | 진동-제어되는 기판 핸들링 로봇, 시스템들, 및 방법들 |
| JP2018171664A (ja) | 2017-03-31 | 2018-11-08 | セイコーエプソン株式会社 | 制御装置、ロボット、およびロボットシステム |
| JP6939024B2 (ja) | 2017-03-31 | 2021-09-22 | セイコーエプソン株式会社 | ロボット制御装置、ロボットおよびロボットシステム |
| JP6870433B2 (ja) * | 2017-03-31 | 2021-05-12 | セイコーエプソン株式会社 | 制御装置、およびロボットシステム |
| JP2018171668A (ja) * | 2017-03-31 | 2018-11-08 | セイコーエプソン株式会社 | 制御装置、ロボット、およびロボットシステム |
-
2019
- 2019-03-26 JP JP2019057543A patent/JP2020157402A/ja active Pending
-
2020
- 2020-03-24 CN CN202010213963.5A patent/CN111745621B/zh active Active
- 2020-03-25 US US16/829,103 patent/US11465280B2/en active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03223907A (ja) * | 1990-01-30 | 1991-10-02 | Citizen Watch Co Ltd | コンプライアアンス機構を有するロボットの制御方法 |
| JPH0425390A (ja) * | 1990-05-20 | 1992-01-29 | Fujitsu Ltd | ロボット制御装置 |
| JP2011110630A (ja) * | 2009-11-24 | 2011-06-09 | Yaskawa Electric Corp | ロボット制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN111745621B (zh) | 2024-04-23 |
| US20200306961A1 (en) | 2020-10-01 |
| US11465280B2 (en) | 2022-10-11 |
| CN111745621A (zh) | 2020-10-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN111745621B (zh) | 机器人控制装置、机器人的控制方法及机器人系统 | |
| JP5891718B2 (ja) | ロボット | |
| US20180236657A1 (en) | Robot simulator, robot system and simulation method | |
| Mohamed et al. | Command shaping techniques for vibration control of a flexible robot manipulator | |
| JP7135408B2 (ja) | ロボット制御装置およびロボットシステム | |
| JP2018149606A (ja) | 生産ラインにおける運用を考慮した学習制御を行うロボット及びその制御方法 | |
| Mohamed et al. | Vibration control of a single-link flexible manipulator using command shaping techniques | |
| CN109562518B (zh) | 并联连杆机构的控制装置 | |
| CN111015738A (zh) | 一种工业机器人振动抑制方法 | |
| CN107553492A (zh) | 基于赫兹弹性模型的机器人主动力柔顺销孔对接装配方法 | |
| Economou et al. | Maximally robust input preconditioning for residual vibration suppression using low-pass fir digital filters | |
| JPH10254526A (ja) | 数値制御装置 | |
| JP6859965B2 (ja) | 設定支援装置及び設定支援プログラム | |
| JP5499865B2 (ja) | 多関節型ロボットの速度指令プロファイルの生成方法 | |
| JPH1189291A (ja) | モータの加減速制御方法 | |
| JP2004070790A (ja) | 機械の位置制御装置および機械の位置制御システム | |
| WO2023013168A1 (ja) | 制御装置、制御方法およびプログラム | |
| JP2016030308A (ja) | ロボットシステム、ロボットシステム制御方法、プログラム及び記録媒体 | |
| JPH0695294B2 (ja) | 産業用ロボットの軌跡補間方法 | |
| JP2006277652A (ja) | サーボゲイン算出方法、サーボゲイン算出プログラム及びサーボゲイン算出装置 | |
| Zhang et al. | Velocity optimization algorithm of 4-DOF robot end-effectors | |
| JP7496095B2 (ja) | 制御システム、制御方法、コンピュータ、および制御プログラム | |
| JP3618363B2 (ja) | ロボット制御装置 | |
| JP2021084175A (ja) | シミュレーションシステム、シミュレーション方法、シミュレーションプログラム、ロボットの製造方法、およびロボットシステム | |
| JP7421014B1 (ja) | 加工シミュレーション装置及び加工シミュレーション方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220124 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220124 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20221122 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230110 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230309 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20230711 |