JP2020121833A - エレベータを用いた配達システム、エレベータ制御装置、およびエレベータ制御方法 - Google Patents
エレベータを用いた配達システム、エレベータ制御装置、およびエレベータ制御方法 Download PDFInfo
- Publication number
- JP2020121833A JP2020121833A JP2019013848A JP2019013848A JP2020121833A JP 2020121833 A JP2020121833 A JP 2020121833A JP 2019013848 A JP2019013848 A JP 2019013848A JP 2019013848 A JP2019013848 A JP 2019013848A JP 2020121833 A JP2020121833 A JP 2020121833A
- Authority
- JP
- Japan
- Prior art keywords
- car
- elevator
- floor
- moving body
- delivery
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images







Landscapes
- Elevator Control (AREA)
Abstract
Description
〈第1実施形態によるエレベータを用いた配達システムの構成〉
本発明の第1実施形態によるエレベータを用いた配達システムの構成について、図1を参照して説明する。本実施形態による配達システム1Aは、1階がエントランス階(基準階)であり2階〜6階が住居階である6階建ての建物に設置されたエレベータEと、当該建物内でエレベータEを利用して異なる階床間で配達物である郵便物を搬送する、5台の自走式の移動体であるロボット装置20−1〜20−5と、各階のエレベータ乗場(1階)7−1〜乗場(6階)7−6にそれぞれ設置されてロボット装置20−1〜20−5と無線通信を行う乗場無線通信装置71−1〜71−6とを備える。
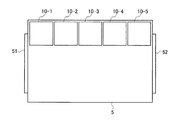
次に、本実施形態によるエレベータを用いた配達システム1Aの動作について、図3のフローチャートを参照して説明する。図3は、配達システム1A内で搬送専用運転が実行されるときのエレベータ制御装置10の動作を示す。本実施形態において、ロボット装置20−1〜20−5は、予め乗りかご5内に所定の順序で並べて配置されている。ロボット装置20−1〜20−5は四角柱状に形成されているため、乗りかご5内の一側面に隙間なく配置することができ、一般利用者の乗車スペースをなるべく広く確保ことができる。
〈第2実施形態によるエレベータを用いた配達システムの構成〉
本発明の第2実施形態によるエレベータを用いた配達システム1Bの構成は、ロボット装置20−1〜20−5が、配達物格納スペース21−1〜21−5内に格納された郵便物を、所定場所に移動させる配達物移動機構(図示せず)をさらに有することを除いては、第1実施形態で説明した配達システム1Aの構成と同様であるため、同一機能を有する部分の詳細な説明は省略する。
本実施形態によるエレベータを用いた配達システム1Bの動作について、図3のフローチャートを参照して説明する。本実施形態において、ステップS1〜S8で実行される処理は、第1実施形態で説明した処理と同様であるため、詳細な説明は省略する。
〈第3実施形態によるエレベータを用いた配達システムの構成〉
本発明の第3実施形態によるエレベータを用いた配達システム1Cの構成は、第1実施形態で説明した配達システム1Aの構成と同様であるため、同一機能を有する部分の詳細な説明は省略する。
次に、本実施形態によるエレベータを用いた配達システム1Cの動作について、図4のフローチャートを参照して説明する。本実施形態において、ステップS1〜S5で実行される処理は、第1実施形態で説明した処理と同様であるため、詳細な説明は省略する。
Claims (12)
- 建物内に設置されたエレベータと、前記エレベータに無線接続され、前記建物内で前記エレベータを利用して異なる階床間で配達物を搬送する自走式の移動体とを備え、
前記移動体は、
前記配達物を格納する配達物格納スペースと、
前記エレベータからの指示に従って移動する移動機構と、
自移動体の位置情報を取得する位置情報取得部と
を有し、
前記エレベータの制御装置は、
前記移動体の搬送先の階床情報を取得する搬送先情報取得部と、
前記移動体が前記エレベータの乗りかご内にあり、前記乗りかご内に利用者がおらず、且つ、前記エレベータ内で呼びが登録されていない状態で前記配達物の搬送処理開始指示を取得すると、搬送専用運転に切り替え、前記搬送先情報取得部で取得した階床情報で示される階に前記乗りかごを着床させて戸開させ、前記移動体に対し、前記乗りかごからの降車指示を無線送信する搬送運転制御部と
を有することを特徴とするエレベータを用いた配達システム。 - 前記乗りかごは、一般利用者が乗降に用いる方向に設置された乗場側かごドアと、前記乗場側かごドアと異なる方向であり、前記乗りかご内にある移動体への配達物の投入作業を行う作業員が利用する方向に設置された搬送用かごドアとを有する
ことを特徴とする請求項1に記載のエレベータを用いた配達システム。 - 前記移動体は、四角柱状に形成される
ことを特徴とする請求項1または2に記載のエレベータを用いた配達システム。 - 前記移動体は複数台設置され、
前記エレベータの制御装置の搬送先情報取得部は、前記移動体ごとの搬送先の階床情報を取得し、
前記搬送運転制御部は、前記搬送専用運転に切り替えると、前記搬送先情報取得部で取得した階床情報で示される階に順次乗りかごを着床させて戸開させ、戸開した階床で、該当する移動体に対し、前記乗りかごからの降車指示を送信する
ことを特徴とする請求項1〜3いずれか1項に記載のエレベータを用いた配達システム。 - 配達物を格納する配達物格納スペースと、移動機構と、位置情報を取得する位置情報取得部とを有し、建物内に設置されたエレベータを利用して異なる階床間で配達物を搬送する自走式の移動体に無線接続され、
前記移動体の搬送先の階床情報を取得する搬送先情報取得部と、
前記移動体が前記エレベータの乗りかご内にあり、前記乗りかご内に利用者がおらず、且つ、前記エレベータ内で呼びが登録されていない状態で前記配達物の搬送処理開始指示を取得すると、搬送専用運転に切り替え、前記搬送先情報取得部で取得した階床情報で示される階に前記乗りかごを着床させて戸開させ、前記移動体に対し、前記乗りかごからの降車指示を無線送信する搬送運転制御部と
を有することを特徴とするエレベータ制御装置。 - 前記移動体は複数台設置され、
前記搬送先情報取得部は、前記移動体ごとの搬送先の階床情報を取得し、
前記搬送運転制御部は、前記搬送専用運転に切り替えると、前記搬送先情報取得部で取得した階床情報で示される階に順次乗りかごを着床させて戸開させ、戸開した階床で、該当する移動体に対し、前記乗りかごからの降車指示を送信する
ことを特徴とする請求項5に記載のエレベータ制御装置。 - 前記複数台の移動体はそれぞれ、前記配達物格納スペースにかかる荷重量を検知する荷重検知装置をさらに有し、
前記搬送運転制御部は、各移動体の荷重検知装置で取得された情報に基づいて、前記乗りかごのかご吊芯に近い場所に、最も重量の多い移動体を配置するように前記乗りかご内における各移動体の配置位置を決定し、各移動体に対し、決定した配置位置に移動する指示を送信する
ことを特徴とする請求項6に記載のエレベータ制御装置。 - 前記複数台の移動体はそれぞれ、前記配達物格納スペースにかかる荷重量を検知する荷重検知装置を有し、
前記エレベータのカウンタウェイトの量を調整するカウンタウェイト調整機構をさらに有し、
前記搬送運転制御部は、各移動体の荷重検知装置で取得された情報に基づいて、前記カウンタウェイト調整機構により前記カウンタウェイトの量を調整させる
ことを特徴とする請求項6または7に記載のエレベータ制御装置。 - 前記搬送運転制御部は、前記移動体が搬送先の階床で降車すると通常運転に切り替え、その後所定時間経過すると、前記乗りかごを前記移動体がある階に着床させて戸開させ、前記移動体に対し、前記乗りかごへの乗車指示を送信する
ことを特徴とする請求項5〜8いずれか1項に記載のエレベータ制御装置。 - 前記搬送運転制御部は、前記移動体が搬送先の階床で降車した後、前記乗りかごを戸開状態で待機させ、前記移動体に対し、前記配達物格納スペースに格納された配達物を所定場所に移動させた後、前記乗りかごに再乗車させる指示を送信する
ことを特徴とする請求項5〜8いずれか1項に記載のエレベータ制御装置。 - 前記搬送運転制御部は、前記搬送専用運転中は、通常運転時よりも前記乗りかごを高速で移動させる
ことを特徴とする請求項5〜10いずれか1項に記載のエレベータ制御装置。 - 配達物を格納する配達物格納スペースと、移動機構と、位置情報を取得する位置情報取得部とを有し、建物内で異なる階床間で配達物を搬送する自走式の移動体に無線接続されたエレベータの制御装置が、
前記移動体の搬送先の階床情報を取得し、
前記移動体が前記エレベータの乗りかご内にあり、前記乗りかご内に利用者がおらず、且つ、前記エレベータ内で呼びが登録されていない状態で前記配達物の搬送処理開始指示を取得すると、搬送専用運転に切り替え、取得した階床情報で示される階に前記乗りかごを着床させて戸開させ、前記移動体に対し、前記乗りかごからの降車指示を無線送信する
ことを特徴とするエレベータ制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019013848A JP6729979B1 (ja) | 2019-01-30 | 2019-01-30 | エレベータを用いた配達システム、エレベータ制御装置、およびエレベータ制御方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019013848A JP6729979B1 (ja) | 2019-01-30 | 2019-01-30 | エレベータを用いた配達システム、エレベータ制御装置、およびエレベータ制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP6729979B1 JP6729979B1 (ja) | 2020-07-29 |
| JP2020121833A true JP2020121833A (ja) | 2020-08-13 |
Family
ID=71738448
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019013848A Active JP6729979B1 (ja) | 2019-01-30 | 2019-01-30 | エレベータを用いた配達システム、エレベータ制御装置、およびエレベータ制御方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6729979B1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022190320A1 (ja) * | 2021-03-11 | 2022-09-15 | 株式会社Fuji | 昇降移動制御システムおよび昇降移動制御方法 |
| JP7311008B1 (ja) | 2022-11-08 | 2023-07-19 | 三菱電機ビルソリューションズ株式会社 | エレベーターシステム、連携装置、連携方法、および連携プログラム |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009051617A (ja) * | 2007-08-27 | 2009-03-12 | Fuji Heavy Ind Ltd | エレベータ制御システム |
| JP2009234716A (ja) * | 2008-03-27 | 2009-10-15 | Toyota Motor Corp | エレベータシステム及びその制御方法 |
| JP2012106866A (ja) * | 2012-02-23 | 2012-06-07 | Panasonic Corp | 自律移動ロボットのエレベータ乗降方法 |
| JP2013216408A (ja) * | 2012-04-05 | 2013-10-24 | Mitsubishi Electric Building Techno Service Co Ltd | 複数台ロボット搬送エレベータシステム、エレベータ制御装置、エレベータ活用型ロボット並びに複数台のロボットの搬送を行うエレベータの制御方法 |
| JP2019142609A (ja) * | 2018-02-16 | 2019-08-29 | 東芝エレベータ株式会社 | エレベータ、エレベータを用いた配達処理システム、およびエレベータを用いた配達処理方法 |
-
2019
- 2019-01-30 JP JP2019013848A patent/JP6729979B1/ja active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009051617A (ja) * | 2007-08-27 | 2009-03-12 | Fuji Heavy Ind Ltd | エレベータ制御システム |
| JP2009234716A (ja) * | 2008-03-27 | 2009-10-15 | Toyota Motor Corp | エレベータシステム及びその制御方法 |
| JP2012106866A (ja) * | 2012-02-23 | 2012-06-07 | Panasonic Corp | 自律移動ロボットのエレベータ乗降方法 |
| JP2013216408A (ja) * | 2012-04-05 | 2013-10-24 | Mitsubishi Electric Building Techno Service Co Ltd | 複数台ロボット搬送エレベータシステム、エレベータ制御装置、エレベータ活用型ロボット並びに複数台のロボットの搬送を行うエレベータの制御方法 |
| JP2019142609A (ja) * | 2018-02-16 | 2019-08-29 | 東芝エレベータ株式会社 | エレベータ、エレベータを用いた配達処理システム、およびエレベータを用いた配達処理方法 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022190320A1 (ja) * | 2021-03-11 | 2022-09-15 | 株式会社Fuji | 昇降移動制御システムおよび昇降移動制御方法 |
| JP7311008B1 (ja) | 2022-11-08 | 2023-07-19 | 三菱電機ビルソリューションズ株式会社 | エレベーターシステム、連携装置、連携方法、および連携プログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6729979B1 (ja) | 2020-07-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2018066056A1 (ja) | エレベーターシステム | |
| US8439169B2 (en) | Elevator group supervision controlling apparatus | |
| US8245819B2 (en) | Refuge supporting device of elevator | |
| US20100025163A1 (en) | Elevator system | |
| JP6729979B1 (ja) | エレベータを用いた配達システム、エレベータ制御装置、およびエレベータ制御方法 | |
| JP6636107B1 (ja) | エレベータを用いた搬送システム、これに用いるエレベータ、およびエレベータ制御方法 | |
| JP6961758B1 (ja) | エレベータ装置およびその制御方法 | |
| CN110775744B (zh) | 多轿厢电梯以及多轿厢电梯控制方法 | |
| JP2011111253A (ja) | エレベータの群管理制御システムおよびその群管理制御方法 | |
| US20200031612A1 (en) | Dynamic car assignment process | |
| JP2014172695A (ja) | エレベータ群管理制御装置 | |
| US20220127113A1 (en) | Method and elevator arrangement | |
| JP5882418B1 (ja) | エレベータシステムおよびこれに利用するエレベータ制御装置、エレベータ制御方法 | |
| TW200846269A (en) | Method for operation of a lift installation, and corresponding lift installation | |
| JP2015044668A (ja) | エレベータの群管理制御システム | |
| WO2021009041A1 (en) | Method and elevator arrangement | |
| JP2011057317A (ja) | エレベータの救出運転システム | |
| JP6355136B2 (ja) | エレベータ制御装置およびエレベータシステム | |
| KR101339395B1 (ko) | 화물운송기능을 구비한 승강기, 이를 이용하는 화물운송 시스템 및 화물운송방법 | |
| CN109132740B (zh) | 电梯装置及其控制方法 | |
| JP6649664B1 (ja) | エレベータシステム、エレベータ制御装置、およびエレベータを用いた搬送方法 | |
| US11993482B2 (en) | Method and arrangement | |
| US20220127110A1 (en) | Method and arrangement | |
| JP2020193062A (ja) | 昇降機制御方法、及び昇降機制御装置 | |
| JP6936362B1 (ja) | リフト装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190130 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200331 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200511 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200602 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200630 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6729979 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |