JP2020007108A - エレベータの重量物運搬方法およびエレベータ装置 - Google Patents
エレベータの重量物運搬方法およびエレベータ装置 Download PDFInfo
- Publication number
- JP2020007108A JP2020007108A JP2018130231A JP2018130231A JP2020007108A JP 2020007108 A JP2020007108 A JP 2020007108A JP 2018130231 A JP2018130231 A JP 2018130231A JP 2018130231 A JP2018130231 A JP 2018130231A JP 2020007108 A JP2020007108 A JP 2020007108A
- Authority
- JP
- Japan
- Prior art keywords
- heavy object
- machine room
- sheave
- rope
- car
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Landscapes
- Lift-Guide Devices, And Elevator Ropes And Cables (AREA)
Abstract
Description
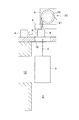
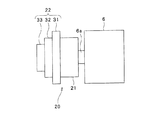
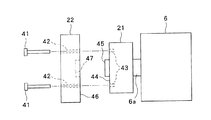
まず、第1の実施の形態によるエレベータの重量物運搬方法およびエレベータ装置について、図1〜図6を用いて説明する。
次に、図7を用いて、本発明の第2の実施の形態におけるエレベータの重量物運搬方法およびエレベータ装置について説明する。
次に、図8を用いて、本発明の第3の実施の形態におけるエレベータの重量物運搬方法およびエレベータ装置について説明する。
Claims (6)
- 乗りかごおよび釣合錘が昇降する昇降路から、機械室の床に設けられた搬入開口部を通過して前記機械室に重量物を搬入するエレベータの重量物運搬方法であって、
前記機械室に設置された巻上機に設けられ、前記乗りかごおよび前記釣合錘を昇降させる主ロープが巻き掛けられるトラクションシーブに、吊りロープを巻き掛けて、前記搬入開口部を通して前記昇降路内に垂下する工程と、
前記吊りロープに、前記重量物を吊り下げる工程と、
前記巻上機を駆動することにより前記重量物を吊り上げて、前記機械室に搬入する工程と、を備えた、エレベータの重量物運搬方法。 - 前記トラクションシーブは、前記主ロープが巻き掛けられる主ロープシーブ部と、前記吊りロープが巻き掛けられる吊りロープシーブ部と、を有している、請求項1に記載のエレベータの重量物運搬方法。
- 前記吊りロープシーブ部の外径は、前記主ロープシーブ部の外径よりも大きい、請求項2に記載のエレベータの重量物運搬方法。
- 前記吊りロープシーブ部は、各々が異なる外径を有する複数のシーブ分割部を含んでいる、請求項2に記載のエレベータの重量物運搬方法。
- 前記吊りロープシーブ部は、前記主ロープシーブ部に対して、着脱可能に取り付けられている、請求項2〜4のいずれか一項に記載のエレベータの重量物運搬方法。
- 乗りかごおよび釣合錘が昇降する昇降路から、機械室の床に設けられた搬入開口部を通過して前記機械室に重量物を搬入するエレベータ装置であって、
前記機械室に設置され、前記乗りかごおよび前記釣合錘を主ロープを介して昇降させる巻上機と、
前記巻上機に設けられたトラクションシーブと、を備え、
前記トラクションシーブは、前記主ロープが巻き掛けられる主ロープシーブ部と、前記搬入開口部を通して前記昇降路内に垂下されて前記重量物を前記昇降路から前記機械室に搬入する吊りロープが巻き掛けられる吊りロープシーブ部と、を有している、エレベータ装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018130231A JP6588136B1 (ja) | 2018-07-09 | 2018-07-09 | エレベータの重量物運搬方法およびエレベータ装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018130231A JP6588136B1 (ja) | 2018-07-09 | 2018-07-09 | エレベータの重量物運搬方法およびエレベータ装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP6588136B1 JP6588136B1 (ja) | 2019-10-09 |
| JP2020007108A true JP2020007108A (ja) | 2020-01-16 |
Family
ID=68159698
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018130231A Active JP6588136B1 (ja) | 2018-07-09 | 2018-07-09 | エレベータの重量物運搬方法およびエレベータ装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6588136B1 (ja) |
-
2018
- 2018-07-09 JP JP2018130231A patent/JP6588136B1/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP6588136B1 (ja) | 2019-10-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN115038660B (zh) | 施工用升降机装置 | |
| JPH03264482A (ja) | エレベータの据付工法 | |
| JP6969686B2 (ja) | 工事用エレベーターの揚程延長方法 | |
| WO2020044444A1 (ja) | 揚程延長式工事用エレベーター | |
| JP2016079002A (ja) | エレベータ機器の揚重方法 | |
| JPWO2018138831A1 (ja) | エレベータの据付方法 | |
| JP6588136B1 (ja) | エレベータの重量物運搬方法およびエレベータ装置 | |
| CN106365058B (zh) | 一种用于重100t以上电机装配的门式起重机 | |
| JP6602923B1 (ja) | エレベータの重量物運搬方法およびエレベータ装置 | |
| JPWO2020065774A1 (ja) | エレベーターの釣合いおもりの揚重装置および揚重方法 | |
| JP7033993B2 (ja) | 巻上機を用いた重量物搬送方法 | |
| CN113056432B (zh) | 施工用电梯装置 | |
| JP2008001509A (ja) | 屋上エレベーター機械室の構造 | |
| JP7144905B1 (ja) | 揚程延長式工事用エレベーター | |
| JP5930842B2 (ja) | エレベータの据付方法及び据付用治具 | |
| JPH05262475A (ja) | エレベータの据付工法 | |
| JP5058181B2 (ja) | エレベータのロープ掛け方法 | |
| JP2023177370A (ja) | エレベータ巻上機の据付補助装置及び据付方法 | |
| WO2023084721A1 (ja) | 工事用エレベーター及び工事用エレベーターのコンペンロープの延長方法 | |
| JPH0920480A (ja) | ロープ式エレベーターを利用した重量物運搬方法及びその方法に用いる重量物運搬装置 | |
| JP2016074534A (ja) | 巻上機揚重方法 | |
| JP6438081B2 (ja) | 高層建物の解体物搬送方法、及び搬送設備 | |
| JPH05201648A (ja) | エレベータの据付方法 | |
| WO2020152740A1 (ja) | 釣合いおもり装置および釣合いおもりの積込み方法 | |
| JPH07252052A (ja) | エレベーターの主ロープ取替方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180709 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190606 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190611 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190807 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190816 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190911 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6588136 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |