JP2019190367A - インジェクタ制御装置 - Google Patents
インジェクタ制御装置 Download PDFInfo
- Publication number
- JP2019190367A JP2019190367A JP2018083617A JP2018083617A JP2019190367A JP 2019190367 A JP2019190367 A JP 2019190367A JP 2018083617 A JP2018083617 A JP 2018083617A JP 2018083617 A JP2018083617 A JP 2018083617A JP 2019190367 A JP2019190367 A JP 2019190367A
- Authority
- JP
- Japan
- Prior art keywords
- fuel pressure
- injector
- injection
- timing
- fuel
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images








Abstract
Description
上記マイクロコンピュータは、上記内燃機関の状態に応じたインジェクタ駆動時間を算出して上記インジェクタを駆動すると共に、上記内燃機関の状態に応じた目標燃圧を算出し、入力された実際の燃圧を上記目標燃圧にするように燃圧を上昇させる燃圧フィードバック制御を実行し、前回の燃圧を上昇させた時間から次回に燃圧を上昇させる時間までの間に、上記気筒で開始される噴射開始タイミングの燃圧を、前回に上昇した燃圧から、少なくとも駆動時間とあらかじめ適合された係数を用いて算出された燃圧低下量を順次減算して推定し、推定された噴射開始タイミングの燃圧を用いて噴射の駆動時間を算出する。
実施の形態1.
高圧ポンプによるデリバリパイプへの燃料供給は、その構造によって定められる所定のクランク角度で行われ、スピル弁により、目標燃圧へフィードバック制御される。このため、チャート開始時点以前の、インジェクタ10の駆動により、低下している燃圧はタイミングA1で目標燃圧に昇圧されている。
(1)駆動時間に比例して、燃圧が低下する。
(2)低下率はどの気筒のインジェクタ10も同じであり、影響先も駆動が重なる場合も同じである。
(3)高圧ポンプとスピル弁により、所定タイミングで目標燃圧に戻される。または、そのタイミングでの燃圧を測定する。
(4)噴射していないときは、燃圧は一定である。
を仮定すれば、燃圧が予測できる。
Pdrop=√(Pstart/Pbase)×K×Ton・・・(1)
ここで、インジェクタ10の噴射特性傾きKは、基準燃圧Pbase(例えば5MPa)におけるインジェクタ駆動時間Tonと燃圧低下量Pdropとの関係を定める定数である。
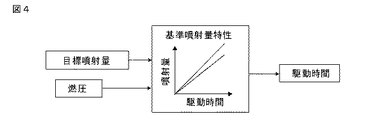
(1)まず、第2気筒と第1気筒において、目標噴射量から駆動時間を図4に基づいて算出し、図7(a)に示す第2気筒の駆動時間t2と、図7(b)に示す第1気筒の駆動時間t1を得る。
(2)次に、第2気筒の駆動時間t2と第1気筒の駆動時間t1との重なりを抽出することにより、タイミングA3からA6が定まる。
(3)このタイミングA3からA6を回転数を用いて時間換算すると、時間T3からT6が得られ、第2気筒の駆動時間t21、t22と、第1気筒の駆動時間t11、t12が得られる。図7では、第2気筒のインジェクタ10の噴射量をQ2、第1気筒のインジェクタ10の噴射量をQ1として示している。
(3)最初の区間、即ち、タイミングA3までの区間から順次、タイミングA3からA4までの区間、タイミングA4からA5までの区間、タイミングA5からA6までの区間、タイミングA6以降の区間のそれぞれの区間において、最新の燃圧で駆動時間Tonから燃圧低下量Pdropを図6に基づいて算出する。
(4)次に、この算出された燃圧低下量Pdropを直前の燃圧から減じて燃圧を更新する。これを繰り返して、タイミングA3からA6での燃圧を算出する。なお、第2気筒の駆動時間t22と、第1気筒の駆動時間t12の重なり区間であるタイミングA4からA5は、それぞれの燃圧低下量Pdropを加算する。
図7において、タイミングA4からA6の燃圧を、タイミングA3の燃圧で行うと、計算は簡便となる。
図8は、タイミングA4からA6の燃圧を、タイミングA3の燃圧で行うと共に、予め設定された燃圧Pstartと基準燃圧Pbaseとを等しい仮定した場合、即ち、Pstart=Pbaseでの計算結果を示している。
また、第2気筒の駆動時間t22による燃圧低下量Pdropの燃圧は、タイミングA3での燃圧、第1気筒の駆動時間t12による燃圧低下量Pdropの燃圧はタイミングA4での燃圧として、噴射開始時点の燃圧をその噴射全体に適用することでもよい。この背景は、最終的には、燃圧予測は各噴射の開始時点の燃圧のみに簡便化しているためである。
図8において、燃圧推定演算タイミング(図5のタイミングA2)では、燃圧センサから読み取った実際の燃圧Preal、または、燃圧F/B制御の目標燃圧Ptgtを、予測燃圧の初期値とする。次の燃圧推定演算タイミング(図5のタイミングA9)でも、同様に予測燃圧を初期化する。
図9及び図10に示す処理は、マイクロコンピュータ23に記憶されたソフトウェア(プログラム)を実行することにより、所定の演算タイミングで繰り返し実行される。
図9のステップS101において、図示しない吸入空気量、または図示しないクランク角センサなどの内燃機関の運転状態に基づいて、各気筒に対し、分割噴射回数、及び各噴射における目標噴射量を算出する。続くステップS102で、燃圧制御の目標燃圧を仮の燃圧とする。続くステップS103では、予めマイクロコンピュータ23に保存された燃圧毎のインジェクタ駆動時間−噴射量特性(図4参照)に基づき、目標噴射量に対応する駆動時間を算出する。続くステップS104で、内燃機関の運転状態に基づいて、各気筒の各噴射の駆動タイミングを算出する。続くステップS105で、各噴射の駆動時間、駆動タイミングから、各噴射の開始タイミングと終了タイミングを算出し、これらをマイクロコンピュータ23に保存する。
図10のステップS106において、現時刻(今回の燃圧推定演算タイミング)から、次の燃圧推定演算タイミングまでの間に、各気筒で駆動される、各噴射の開始タイミングと終了タイミングを抽出する。続くステップS107で、予測燃圧の初期化を行う。この時点での燃圧をセンサから読み取り、実際の燃圧Preal、あるいは、燃圧F/B制御の目標燃圧Ptgtを設定する。続くステップS108で、燃圧低下量Pdropの初期化を行い、0を設定する。
以上のように、開始タイミングが来た時、インジェクタ駆動信号生成部で駆動開始信号が生成され、上記で修正された終了タイミングが来た時、インジェクタ駆動信号生成部で駆動終了信号が生成され、結果として、修正された駆動時間のインジェクタ駆動が実現される。
従って、例示されていない無数の変形例が、本願に開示される技術の範囲内において想定される。例えば、少なくとも1つの構成要素を変形する場合、追加する場合または省略する場合が含まれるものとする。
39 インジェクタ駆動信号生成部、40 インジェクタ通電制御部。
上記マイクロコンピュータは、上記内燃機関の状態に応じたインジェクタ駆動時間を算出して上記インジェクタを駆動すると共に、上記内燃機関の状態に応じた目標燃圧を算出し、入力された実際の燃圧を上記目標燃圧にするように燃圧を上昇させる燃圧フィードバック制御を実行し、前回の燃圧を上昇させた時間から次回に燃圧を上昇させる時間までの間に、上記気筒で開始される噴射開始タイミングの燃圧を、前回に上昇した燃圧から、少なくとも駆動時間とあらかじめ適合された係数を用いて算出された燃圧低下量を順次減算して推定し、推定された噴射開始タイミングの燃圧を用いて噴射の駆動時間を算出し、
上記インジェクタは、複数の気筒を備えた内燃機関のそれぞれの気筒に燃料を噴射するインジェクタであり、上記インジェクタの燃料噴射期間が上記複数の気筒において重なる時は、上記燃料噴射期間の重複数が変化するごとに分割し、燃圧低下量を算出する。
(1)まず、第2気筒と第1気筒において、目標噴射量から駆動時間を図4に基づいて算出し、図7(a)に示す第2気筒の駆動時間t2と、図7(b)に示す第1気筒の駆動時間t1を得る。
(2)次に、第2気筒の駆動時間t2と第1気筒の駆動時間t1との重なりを抽出することにより、タイミングA3からA6が定まる。
(3)このタイミングA3からA6を回転数を用いて時間換算すると、時間T3からT6が得られ、第2気筒の駆動時間t21、t22と、第1気筒の駆動時間t11、t12が得られる。図7では、第2気筒のインジェクタ10の噴射量をQ2、第1気筒のインジェクタ10の噴射量をQ1として示している。
(4)最初の区間、即ち、タイミングA3までの区間から順次、タイミングA3からA4までの区間、タイミングA4からA5までの区間、タイミングA5からA6までの区間、タイミングA6以降の区間のそれぞれの区間において、最新の燃圧で駆動時間Tonから燃圧低下量Pdropを図6に基づいて算出する。
(5)次に、この算出された燃圧低下量Pdropを直前の燃圧から減じて燃圧を更新する。これを繰り返して、タイミングA3からA6での燃圧を算出する。なお、第2気筒の駆動時間t22と、第1気筒の駆動時間t12の重なり区間であるタイミングA4からA5は、それぞれの燃圧低下量Pdropを加算する。
上記マイクロコンピュータは、上記内燃機関の状態に応じたインジェクタ駆動時間を算出して上記インジェクタを駆動すると共に、上記内燃機関の状態に応じた目標燃圧を算出し、入力された実際の燃圧を上記目標燃圧にするように燃圧を上昇させる燃圧フィードバック制御を実行し、前回の燃圧を上昇させた時間から次回に燃圧を上昇させる時間までの間に、上記気筒で開始される噴射開始タイミングの燃圧を、前回に上昇した燃圧から、少なくとも駆動時間とあらかじめ適合された係数を用いて算出された燃圧低下量を順次減算して推定し、推定された噴射開始タイミングの燃圧を用いて噴射の駆動時間を算出し、
上記インジェクタは、一つの気筒に燃料を噴射するインジェクタであり、上記インジェクタから1回の燃料噴射量を分割して気筒内に噴射する場合で、分割期間が重なる時は、上記分割期間の重複数が変化するごとに分割して燃圧低下量を算出する。
上記マイクロコンピュータは、上記内燃機関の状態に応じたインジェクタ駆動時間を算出して上記インジェクタを駆動すると共に、上記内燃機関の状態に応じた目標燃圧を算出し、入力された実際の燃圧を上記目標燃圧にするように燃圧を上昇させる燃圧フィードバック制御を実行し、前回の燃圧を上昇させた時間から次回に燃圧を上昇させる時間までの間に、上記気筒で開始される噴射開始タイミングの燃圧を、前回に上昇した燃圧から、少なくとも駆動時間とあらかじめ適合された係数を用いて算出された燃圧低下量を順次減算して推定し、推定された噴射開始タイミングの燃圧を用いて噴射の駆動時間を算出し、
上記インジェクタは、一つの気筒に燃料を噴射するインジェクタであり、上記インジェクタから1回の燃料噴射量を分割して気筒内に噴射する場合で、分割期間が他の気筒の噴射と重なる時は、上記分割期間の重複数が変化するごとに分割して燃圧低下量を算出する。
Claims (3)
- 内燃機関の気筒に燃料を噴射するインジェクタを駆動制御するインジェクタ制御装置であって、
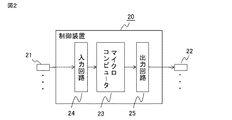
上記インジェクタ制御装置はマイクロコンピュータを備え、
上記マイクロコンピュータは、上記内燃機関の状態に応じたインジェクタ駆動時間を算出して上記インジェクタを駆動すると共に、
上記内燃機関の状態に応じた目標燃圧を算出し、入力された実際の燃圧を上記目標燃圧にするように燃圧を上昇させる燃圧フィードバック制御を実行し、
前回の燃圧を上昇させた時間から次回に燃圧を上昇させる時間までの間に、上記気筒で開始される噴射開始タイミングの燃圧を、前回に上昇した燃圧から、少なくとも駆動時間とあらかじめ適合された係数を用いて算出された燃圧低下量を順次減算して推定し、推定された噴射開始タイミングの燃圧を用いて噴射の駆動時間を算出することを特徴とするインジェクタ制御装置。 - 上記前回の燃圧を上昇させた時間は、上記インジェクタに接続されたデリバリパイプへの供給燃料量を制御する燃圧制御アクチュエータの駆動終了タイミングに、予め設定した燃圧安定期間を加えたタイミングであることを特徴とする請求項1に記載のインジェクタ制御装置。
- 上記インジェクタは、複数の気筒を備えた内燃機関のそれぞれの気筒に燃料を噴射するインジェクタであって、
上記インジェクタの燃料噴射期間が上記複数の気筒において重なる時は、上記燃料噴射期間の重複数が変化するごとに分割し、燃圧低下量を算出することを特徴とする請求項1または2に記載のインジェクタ制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018083617A JP2019190367A (ja) | 2018-04-25 | 2018-04-25 | インジェクタ制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018083617A JP2019190367A (ja) | 2018-04-25 | 2018-04-25 | インジェクタ制御装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2019190367A true JP2019190367A (ja) | 2019-10-31 |
Family
ID=68389325
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018083617A Pending JP2019190367A (ja) | 2018-04-25 | 2018-04-25 | インジェクタ制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2019190367A (ja) |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008038857A (ja) * | 2006-08-10 | 2008-02-21 | Hitachi Ltd | 筒内噴射式内燃機関の制御装置 |
| JP2008038678A (ja) * | 2006-08-03 | 2008-02-21 | Hitachi Ltd | 内燃機関の燃料噴射制御装置および燃料噴射制御方法 |
| JP2008121441A (ja) * | 2006-11-08 | 2008-05-29 | Toyota Motor Corp | 内燃機関の制御装置 |
| JP2010043614A (ja) * | 2008-08-14 | 2010-02-25 | Hitachi Ltd | エンジンの制御装置 |
| JP2014152657A (ja) * | 2013-02-06 | 2014-08-25 | Denso Corp | 内燃機関の燃料噴射制御装置 |
| JP2017160916A (ja) * | 2017-06-26 | 2017-09-14 | 株式会社デンソー | 内燃機関の制御装置 |
-
2018
- 2018-04-25 JP JP2018083617A patent/JP2019190367A/ja active Pending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008038678A (ja) * | 2006-08-03 | 2008-02-21 | Hitachi Ltd | 内燃機関の燃料噴射制御装置および燃料噴射制御方法 |
| JP2008038857A (ja) * | 2006-08-10 | 2008-02-21 | Hitachi Ltd | 筒内噴射式内燃機関の制御装置 |
| JP2008121441A (ja) * | 2006-11-08 | 2008-05-29 | Toyota Motor Corp | 内燃機関の制御装置 |
| JP2010043614A (ja) * | 2008-08-14 | 2010-02-25 | Hitachi Ltd | エンジンの制御装置 |
| JP2014152657A (ja) * | 2013-02-06 | 2014-08-25 | Denso Corp | 内燃機関の燃料噴射制御装置 |
| JP2017160916A (ja) * | 2017-06-26 | 2017-09-14 | 株式会社デンソー | 内燃機関の制御装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9322356B2 (en) | Method and control unit for operating a valve | |
| US9494100B2 (en) | Determining the closing point in time of an injection valve on the basis of an analysis of the actuation voltage using an adapted reference voltage signal | |
| CN109328261B (zh) | 燃料喷射控制装置 | |
| CN107709740B (zh) | 燃料喷射控制装置 | |
| EP2850307B1 (en) | Method for monitoring an injection valve | |
| CN107965395B (zh) | 喷射器控制装置以及喷射器控制方法 | |
| JP5287915B2 (ja) | 燃料噴射状態推定装置 | |
| CN106988916B (zh) | 用于确定燃料喷射器的打开延迟持续时间的方法 | |
| JP5141723B2 (ja) | 内燃機関の燃料噴射制御装置 | |
| JP5003796B2 (ja) | 燃料噴射状態検出装置 | |
| CN108425757B (zh) | 用于内燃机的燃料喷射控制器和燃料喷射控制方法 | |
| US9683509B2 (en) | Method for actuating a switch element of a valve device | |
| JP2009036196A (ja) | ソレノイド弁用制御装置 | |
| US20190010889A1 (en) | Optimization of current injection profile for solenoid injectors | |
| US9309852B2 (en) | Method for activating an injector in a fuel injection system in an internal combustion engine | |
| JP2019027348A (ja) | 燃料噴射制御装置及び燃料噴射制御方法 | |
| CN105863861B (zh) | 用于运行喷射阀的方法 | |
| CN113167185B (zh) | 燃料喷射控制装置 | |
| JP5126296B2 (ja) | 燃料噴射状態検出装置 | |
| JP2019190367A (ja) | インジェクタ制御装置 | |
| JP5565435B2 (ja) | 燃料噴射制御装置 | |
| JP5375848B2 (ja) | 燃料噴射状態解析装置 | |
| CN108730060B (zh) | 喷射器的控制装置 | |
| JP2011047318A (ja) | 内燃機関の制御装置 | |
| JP6519669B2 (ja) | 高圧ポンプの制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180425 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190219 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190326 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190514 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190613 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190712 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190730 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20200212 |