JP2019074791A - 車両用運転支援装置 - Google Patents
車両用運転支援装置 Download PDFInfo
- Publication number
- JP2019074791A JP2019074791A JP2017198467A JP2017198467A JP2019074791A JP 2019074791 A JP2019074791 A JP 2019074791A JP 2017198467 A JP2017198467 A JP 2017198467A JP 2017198467 A JP2017198467 A JP 2017198467A JP 2019074791 A JP2019074791 A JP 2019074791A
- Authority
- JP
- Japan
- Prior art keywords
- driver
- sleepiness
- depth
- vehicle
- control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 206010041349 Somnolence Diseases 0.000 claims abstract description 109
- 238000012545 processing Methods 0.000 claims abstract description 21
- 238000001514 detection method Methods 0.000 claims abstract description 7
- 208000032140 Sleepiness Diseases 0.000 claims description 75
- 230000037321 sleepiness Effects 0.000 claims description 75
- 238000000034 method Methods 0.000 claims description 54
- 230000008569 process Effects 0.000 claims description 54
- 230000008921 facial expression Effects 0.000 claims description 8
- 230000004936 stimulating effect Effects 0.000 claims description 6
- 230000008786 sensory perception of smell Effects 0.000 claims description 3
- 238000012544 monitoring process Methods 0.000 abstract description 2
- 238000004891 communication Methods 0.000 description 18
- 230000000638 stimulation Effects 0.000 description 12
- 230000006870 function Effects 0.000 description 10
- FFBHFFJDDLITSX-UHFFFAOYSA-N benzyl N-[2-hydroxy-4-(3-oxomorpholin-4-yl)phenyl]carbamate Chemical compound OC1=C(NC(=O)OCC2=CC=CC=C2)C=CC(=C1)N1CCOCC1=O FFBHFFJDDLITSX-UHFFFAOYSA-N 0.000 description 5
- 230000008859 change Effects 0.000 description 3
- 210000003128 head Anatomy 0.000 description 3
- 238000003384 imaging method Methods 0.000 description 3
- 238000001816 cooling Methods 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 210000000744 eyelid Anatomy 0.000 description 2
- 230000014509 gene expression Effects 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 230000001737 promoting effect Effects 0.000 description 2
- 241001282135 Poromitra oscitans Species 0.000 description 1
- 206010048232 Yawning Diseases 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000002708 enhancing effect Effects 0.000 description 1
- 230000004424 eye movement Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000029058 respiratory gaseous exchange Effects 0.000 description 1
- 230000035945 sensitivity Effects 0.000 description 1
- 230000002618 waking effect Effects 0.000 description 1
Images







Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08B—SIGNALLING OR CALLING SYSTEMS; ORDER TELEGRAPHS; ALARM SYSTEMS
- G08B21/00—Alarms responsive to a single specified undesired or abnormal condition and not otherwise provided for
- G08B21/02—Alarms for ensuring the safety of persons
- G08B21/06—Alarms for ensuring the safety of persons indicating a condition of sleep, e.g. anti-dozing alarms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M21/00—Other devices or methods to cause a change in the state of consciousness; Devices for producing or ending sleep by mechanical, optical, or acoustical means, e.g. for hypnosis
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60N—SEATS SPECIALLY ADAPTED FOR VEHICLES; VEHICLE PASSENGER ACCOMMODATION NOT OTHERWISE PROVIDED FOR
- B60N2/00—Seats specially adapted for vehicles; Arrangement or mounting of seats in vehicles
- B60N2/56—Heating or ventilating devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/30—Conjoint control of vehicle sub-units of different type or different function including control of auxiliary equipment, e.g. air-conditioning compressors or oil pumps
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/001—Planning or execution of driving tasks
- B60W60/0015—Planning or execution of driving tasks specially adapted for safety
- B60W60/0016—Planning or execution of driving tasks specially adapted for safety of the vehicle or its occupants
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/005—Handover processes
- B60W60/0051—Handover processes from occupants to vehicle
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/59—Context or environment of the image inside of a vehicle, e.g. relating to seat occupancy, driver state or inner lighting conditions
- G06V20/597—Recognising the driver's state or behaviour, e.g. attention or drowsiness
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/30—Services specially adapted for particular environments, situations or purposes
- H04W4/40—Services specially adapted for particular environments, situations or purposes for vehicles, e.g. vehicle-to-pedestrians [V2P]
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/143—Alarm means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/146—Display means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2420/00—Indexing codes relating to the type of sensors based on the principle of their operation
- B60W2420/40—Photo, light or radio wave sensitive means, e.g. infrared sensors
- B60W2420/403—Image sensing, e.g. optical camera
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/229—Attention level, e.g. attentive to driving, reading or sleeping
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V40/00—Recognition of biometric, human-related or animal-related patterns in image or video data
- G06V40/10—Human or animal bodies, e.g. vehicle occupants or pedestrians; Body parts, e.g. hands
- G06V40/16—Human faces, e.g. facial parts, sketches or expressions
- G06V40/174—Facial expression recognition
- G06V40/176—Dynamic expression
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V40/00—Recognition of biometric, human-related or animal-related patterns in image or video data
- G06V40/10—Human or animal bodies, e.g. vehicle occupants or pedestrians; Body parts, e.g. hands
- G06V40/18—Eye characteristics, e.g. of the iris
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/30—Services specially adapted for particular environments, situations or purposes
- H04W4/40—Services specially adapted for particular environments, situations or purposes for vehicles, e.g. vehicle-to-pedestrians [V2P]
- H04W4/44—Services specially adapted for particular environments, situations or purposes for vehicles, e.g. vehicle-to-pedestrians [V2P] for communication between vehicles and infrastructures, e.g. vehicle-to-cloud [V2C] or vehicle-to-home [V2H]
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/30—Services specially adapted for particular environments, situations or purposes
- H04W4/40—Services specially adapted for particular environments, situations or purposes for vehicles, e.g. vehicle-to-pedestrians [V2P]
- H04W4/46—Services specially adapted for particular environments, situations or purposes for vehicles, e.g. vehicle-to-pedestrians [V2P] for vehicle-to-vehicle communication [V2V]
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Transportation (AREA)
- Automation & Control Theory (AREA)
- Human Computer Interaction (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Health & Medical Sciences (AREA)
- Computer Networks & Wireless Communication (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Aviation & Aerospace Engineering (AREA)
- Business, Economics & Management (AREA)
- Signal Processing (AREA)
- Emergency Management (AREA)
- Theoretical Computer Science (AREA)
- Multimedia (AREA)
- Anesthesiology (AREA)
- Psychology (AREA)
- Acoustics & Sound (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Hematology (AREA)
- Life Sciences & Earth Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Traffic Control Systems (AREA)
- Emergency Alarm Devices (AREA)
Abstract
Description
以下、第1実施形態について、図1ないし図9を参照して説明する。図1は、本実施形態の車両システム1の全体概略構成を示すブロック図である。この車両システム1は、車両用運転支援装置を構成する。車両システム1は、車両の走行を制御する車両走行制御部2と、各種の車載装置間で通信される情報を制御する車載情報制御部3とを備えている。
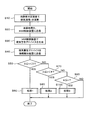
尚、上記ステップS310において、眠気深度nが3未満であるときには、「NO」へ進み、本制御を終了する。
尚、上記ステップS410において、眠気深度nが4未満であるときには、「NO」へ進み、本制御を終了する。
図10は、第2実施形態を示すものである。尚、第1実施形態と同一構成には、同一符号を付している。第1実施形態では、ドライバの眠気深度nを検出し、ドライバの居眠り判定を、眠気深度nの値に応じて3段階に分けて判定するように構成したが、これに代えて、第2実施形態では、ドライバの眼の開眼度と開眼時間に基づいて、ドライバの居眠り度合を、3段階に分けて判定するように構成した。
また、上記各実施形態では、DSM用データ処理部8を車両走行制御部2側に設けるように構成したが、これに代えて、DSM用データ処理部8を情報制御部3側に設けるように構成しても良い。
Claims (5)
- ドライバの状態をモニタするドライバモニタ部(12)と、
モニタされたドライバの状態に基づいてドライバの眠気深度または居眠りの度合を検出する眠気検出部(9)と、
ドライバを覚醒させるための複数の処理の中から、検出されたドライバの眠気深度または居眠りの度合のレベルに対応する処理を選択して実行する制御部(3)と
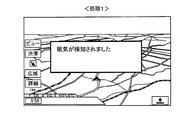
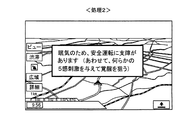
を備えた車両用運転支援装置。 - 前記制御部は、眠気深度が低レベルであるときには、画面に警告メッセージを表示する処理を実行し、眠気深度が中レベルであるときには、ドライバの5感を刺激する処理を実行し、眠気深度が高レベルであるときには、運転モードを退避モードに切り替え、車両を自動的に停車させる処理を実行するように構成された請求項1記載の車両用運転支援装置。
- ドライバの5感を刺激する処理は、エアコンの風量を強にして皮膚の温度を下げる制御、警告音または警告音声を出力する制御、手に高電圧電流を印加する制御、シートヒータを強にして皮膚の温度を高める制御、または、刺激臭を発生させて嗅覚を刺激する制御である請求項1または2記載の車両用運転支援装置。
- 眠気深度は、ドライバの顔の表情や身体の動作をカメラで撮影し、撮影した画像情報に基づいて3段階以上のレベルに分けて検出されるように構成された請求項1から3のいずれか一項記載の車両用運転支援装置。
- 前記制御部は、運転モードを退避モードに切り替えたときには、退避モードに切り替えたことを、周辺の車両に報知するように構成された請求項2記載の車両用運転支援装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017198467A JP2019074791A (ja) | 2017-10-12 | 2017-10-12 | 車両用運転支援装置 |
| DE112018004487.4T DE112018004487T5 (de) | 2017-10-12 | 2018-08-28 | Fahrzeug-fahrassistenzvorrichtung |
| PCT/JP2018/031750 WO2019073708A1 (ja) | 2017-10-12 | 2018-08-28 | 車両用運転支援装置 |
| US16/822,603 US20200216095A1 (en) | 2017-10-12 | 2020-03-18 | Vehicle driving assistance apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017198467A JP2019074791A (ja) | 2017-10-12 | 2017-10-12 | 車両用運転支援装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019074791A true JP2019074791A (ja) | 2019-05-16 |
| JP2019074791A5 JP2019074791A5 (ja) | 2020-01-30 |
Family
ID=66101395
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017198467A Pending JP2019074791A (ja) | 2017-10-12 | 2017-10-12 | 車両用運転支援装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20200216095A1 (ja) |
| JP (1) | JP2019074791A (ja) |
| DE (1) | DE112018004487T5 (ja) |
| WO (1) | WO2019073708A1 (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020256177A1 (ko) * | 2019-06-18 | 2020-12-24 | 엘지전자 주식회사 | 차량 제어 방법 |
| WO2021033551A1 (ja) * | 2019-08-21 | 2021-02-25 | 株式会社東海理化電機製作所 | 情報通知装置、制御装置、および非一時的なコンピュータ可読媒体 |
| WO2021033549A1 (ja) * | 2019-08-21 | 2021-02-25 | 株式会社東海理化電機製作所 | 移動支援装置、制御装置、および非一時的なコンピュータ可読媒体 |
| JP2023094914A (ja) * | 2021-12-24 | 2023-07-06 | パナソニックIpマネジメント株式会社 | 推定装置、推定方法及びプログラム |
| US12065160B2 (en) | 2021-12-27 | 2024-08-20 | Panasonic Automotive Systems Co., Ltd. | Awakening support device and awakening support method |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11361560B2 (en) * | 2018-02-19 | 2022-06-14 | Mitsubishi Electric Corporation | Passenger state detection device, passenger state detection system, and passenger state detection method |
| JP7140154B2 (ja) * | 2020-03-04 | 2022-09-21 | トヨタ自動車株式会社 | 車両制御装置 |
| US20240034362A1 (en) * | 2020-09-07 | 2024-02-01 | Sony Semiconductor Solutions Corporation | Information processing device, information processing method, and information processing program |
| JP7540319B2 (ja) * | 2020-12-11 | 2024-08-27 | 株式会社デンソー | 覚醒装置 |
| CN112569447B (zh) * | 2020-12-17 | 2023-07-11 | 大陆投资(中国)有限公司 | 用于车辆用户的睡眠辅助方法和车载信息娱乐系统 |
| CN113516015B (zh) * | 2021-04-15 | 2023-12-05 | 广东工业大学 | 情绪识别方法、辅助驾驶装置以及应用 |
| US20230069381A1 (en) * | 2021-08-31 | 2023-03-02 | Panasonic Intellectual Property Management Co., Ltd. | Sleepiness prediction system and sleepiness prediction method |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003317197A (ja) * | 2002-04-26 | 2003-11-07 | Aisin Aw Co Ltd | 警報システム |
| JP2005062911A (ja) * | 2003-06-16 | 2005-03-10 | Fujitsu Ten Ltd | 車両制御装置 |
| JP2010128649A (ja) * | 2008-11-26 | 2010-06-10 | Nissan Motor Co Ltd | 覚醒状態判断装置及び覚醒状態判断方法 |
| WO2011111206A1 (ja) * | 2010-03-11 | 2011-09-15 | トヨタ自動車株式会社 | 生体状態判定装置 |
| JP2012245091A (ja) * | 2011-05-26 | 2012-12-13 | Panasonic Corp | 眠気推定装置及び眠気推定方法 |
-
2017
- 2017-10-12 JP JP2017198467A patent/JP2019074791A/ja active Pending
-
2018
- 2018-08-28 WO PCT/JP2018/031750 patent/WO2019073708A1/ja active Application Filing
- 2018-08-28 DE DE112018004487.4T patent/DE112018004487T5/de active Pending
-
2020
- 2020-03-18 US US16/822,603 patent/US20200216095A1/en not_active Abandoned
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003317197A (ja) * | 2002-04-26 | 2003-11-07 | Aisin Aw Co Ltd | 警報システム |
| JP2005062911A (ja) * | 2003-06-16 | 2005-03-10 | Fujitsu Ten Ltd | 車両制御装置 |
| JP2010128649A (ja) * | 2008-11-26 | 2010-06-10 | Nissan Motor Co Ltd | 覚醒状態判断装置及び覚醒状態判断方法 |
| WO2011111206A1 (ja) * | 2010-03-11 | 2011-09-15 | トヨタ自動車株式会社 | 生体状態判定装置 |
| JP2012245091A (ja) * | 2011-05-26 | 2012-12-13 | Panasonic Corp | 眠気推定装置及び眠気推定方法 |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020256177A1 (ko) * | 2019-06-18 | 2020-12-24 | 엘지전자 주식회사 | 차량 제어 방법 |
| US11396304B2 (en) | 2019-06-18 | 2022-07-26 | Lg Electronics Inc. | Vehicle control method |
| WO2021033551A1 (ja) * | 2019-08-21 | 2021-02-25 | 株式会社東海理化電機製作所 | 情報通知装置、制御装置、および非一時的なコンピュータ可読媒体 |
| WO2021033549A1 (ja) * | 2019-08-21 | 2021-02-25 | 株式会社東海理化電機製作所 | 移動支援装置、制御装置、および非一時的なコンピュータ可読媒体 |
| JP2021033506A (ja) * | 2019-08-21 | 2021-03-01 | 株式会社東海理化電機製作所 | 移動支援装置、制御装置、およびコンピュータプログラム |
| JP2021033508A (ja) * | 2019-08-21 | 2021-03-01 | 株式会社東海理化電機製作所 | 情報通知装置、制御装置、およびコンピュータプログラム |
| JP2023094914A (ja) * | 2021-12-24 | 2023-07-06 | パナソニックIpマネジメント株式会社 | 推定装置、推定方法及びプログラム |
| JP7460867B2 (ja) | 2021-12-24 | 2024-04-03 | パナソニックオートモーティブシステムズ株式会社 | 推定装置、推定方法及びプログラム |
| US12065160B2 (en) | 2021-12-27 | 2024-08-20 | Panasonic Automotive Systems Co., Ltd. | Awakening support device and awakening support method |
Also Published As
| Publication number | Publication date |
|---|---|
| US20200216095A1 (en) | 2020-07-09 |
| DE112018004487T5 (de) | 2020-10-01 |
| WO2019073708A1 (ja) | 2019-04-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2019074791A (ja) | 車両用運転支援装置 | |
| US10875536B2 (en) | Coordinated vehicle response system and method for driver behavior | |
| JP6342856B2 (ja) | 車両制御装置 | |
| JP7560486B2 (ja) | 情報処理装置、情報処理システム、情報処理方法及び情報処理プログラム | |
| WO2015072069A1 (ja) | ドライバ監視装置 | |
| WO2014149657A1 (en) | Coordinated vehicle response system and method for driver behavior | |
| US9977239B2 (en) | Vehicle information presentation device | |
| KR20150032598A (ko) | 운전자 거동에 응답하는 시스템 및 방법 | |
| US10899356B2 (en) | Drowsiness prevention device, drowsiness prevention method, and recording medium | |
| KR20150139229A (ko) | 헤드 마운트 디스플레이를 활용한 운전자 졸음경보장치 및 방법 | |
| JP6730096B2 (ja) | 乗員状態監視装置 | |
| US20190283672A1 (en) | System and method to control a vehicle interface for human perception optimization | |
| WO2016103468A1 (ja) | 衝突回避システム及び衝突回避方法 | |
| JP2013152679A (ja) | 運転支援装置 | |
| US20130187847A1 (en) | In-car eye control method | |
| US11430231B2 (en) | Emotion estimation device and emotion estimation method | |
| JP2019021154A (ja) | 覚醒機能を備えた電子装置、覚醒プログラムおよび覚醒方法 | |
| JP2008197916A (ja) | 車両用居眠り運転防止装置 | |
| JP2019008427A (ja) | 覚醒維持装置 | |
| JP6977589B2 (ja) | 車両用警報装置 | |
| JP6658095B2 (ja) | 覚醒維持装置及びプログラム | |
| KR101708872B1 (ko) | 졸음 운전 예방 시스템 | |
| JP2019008468A (ja) | 覚醒維持装置 | |
| KR101526116B1 (ko) | 원터치 졸음 운전 방지 시스템 및 그 방법 | |
| JP2019179370A (ja) | 車速制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191211 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20191211 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210119 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210309 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210601 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210727 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20220111 |