JP2019016052A - 操作入力装置 - Google Patents
操作入力装置 Download PDFInfo
- Publication number
- JP2019016052A JP2019016052A JP2017131202A JP2017131202A JP2019016052A JP 2019016052 A JP2019016052 A JP 2019016052A JP 2017131202 A JP2017131202 A JP 2017131202A JP 2017131202 A JP2017131202 A JP 2017131202A JP 2019016052 A JP2019016052 A JP 2019016052A
- Authority
- JP
- Japan
- Prior art keywords
- button
- unit
- operated
- capacitance
- operation input
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 230000008859 change Effects 0.000 claims description 55
- 238000001514 detection method Methods 0.000 claims description 27
- 238000013459 approach Methods 0.000 claims description 18
- 230000003068 static effect Effects 0.000 claims description 3
- 230000002093 peripheral effect Effects 0.000 claims description 2
- 230000005611 electricity Effects 0.000 claims 1
- 238000000034 method Methods 0.000 description 21
- 238000003825 pressing Methods 0.000 description 20
- 230000008569 process Effects 0.000 description 18
- 230000003071 parasitic effect Effects 0.000 description 9
- 238000013461 design Methods 0.000 description 6
- 230000004913 activation Effects 0.000 description 2
- 238000012937 correction Methods 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 230000035945 sensitivity Effects 0.000 description 2
- 238000000926 separation method Methods 0.000 description 2
- 230000007423 decrease Effects 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 239000011347 resin Substances 0.000 description 1
- 229920005989 resin Polymers 0.000 description 1
Images











Landscapes
- Input From Keyboards Or The Like (AREA)
Abstract
【課題】適切な操作位置を検出することができる操作入力装置を提供する。
【解決手段】操作入力装置1は、ボタン15等を突没させるボタン押上げレバー18等、モータ8等と、ボタン15等を含む周辺の物体との間の静電容量を検出する静電センサ3と、を備えている。さらに、指がボタン15等に接近又は接触していない状態で静電センサ3により検出される静電容量を、ボタンが突没した形体ごとに初期値として記憶する操作入力制御部102を備え、この操作入力制御部102は、指がボタン15等に接近又は接触した際に、初期値を基準として算出した静電容量変化に基づいてボタン15等になされた操作を特定する。
【選択図】図1
【解決手段】操作入力装置1は、ボタン15等を突没させるボタン押上げレバー18等、モータ8等と、ボタン15等を含む周辺の物体との間の静電容量を検出する静電センサ3と、を備えている。さらに、指がボタン15等に接近又は接触していない状態で静電センサ3により検出される静電容量を、ボタンが突没した形体ごとに初期値として記憶する操作入力制御部102を備え、この操作入力制御部102は、指がボタン15等に接近又は接触した際に、初期値を基準として算出した静電容量変化に基づいてボタン15等になされた操作を特定する。
【選択図】図1
Description
本発明は、被操作部が操作される操作入力装置に関する。
タッチ面を有する操作入力装置であるタッチパッドと押圧されるボタン等のプッシュスイッチの双方の利点を同時に実現した操作入力装置が提案されている。
この種の操作入力装置として、例えば特許文献1が提案されている。特許文献1に記載された操作入力装置は、タッチ面の一部の領域に存在する操作体可動部を、タッチ面と面一となるタッチ面位置と、その位置から上昇したボタン位置との間で移動する操作体を備えることが記載されている。そして、操作体を支持する3個以上の起歪体の歪検出結果に基づいて、ボタン位置の操作体可動部への押圧操作をプッシュボタン操作入力として受け付け、タッチ面位置への押圧操作をタッチ操作入力として受け付ける。
また、特許文献2には、意匠パネルの裏面に複数の電極が敷設され、当該電極から発生している静電容量を基に意匠パネルに対するタッチ位置を検出するタッチ位置検出装置が記載されている。このタッチ位置検出装置は、意匠パネルの厚さの違いに起因する静電容量のばらつきを無くすための補正係数を基に、電極の静電容量を補正してタッチ位置を算出する。
特許文献1に記載されている操作入力装置の場合、操作体を支持する3個以上の起歪体のそれぞれの歪量に基づいて操作体に作用する力の重心を算出し、これに基づいて操作位置を判定する。したがって、3個以上の起歪体の歪量検出に高い精度が要求される。さらに、各起歪体間の特性のバラつきや外部振動による検出値のバラつき、或いは温度変化や経年変化等によって検出精度が悪化する。
そこで、起歪体に代えて特許文献2に記載されている静電センサ3を利用して、操作位置を判定する方法が考えられる。しかしながら、特許文献2に記載の発明は、特許文献1に記載されているようにタッチ面の一部がボタンとなって、そのボタンが上昇/下降するようなものについては何ら考慮されていない。特許文献1に記載されているようなボタンは上昇時と下降時において静電センサが検出する静電容量値が異なるため、特許文献2に記載されているような補正係数では正しく補正できない場合がある。そのため、適切な操作位置を検出できない場合がある。
本発明が解決しようとする課題としては、上述したような適切な操作位置を検出することが一例として挙げられる。
上記課題を解決するために、請求項1に記載の発明は、被操作部の形体を変化させる形体変更部と、前記被操作部を含む周辺の物体との間の静電容量を検出する静電センサと、操作子が前記被操作部に接近又は接触していない状態で前記静電センサにより検出される静電容量を、前記被操作部の形体ごとに初期値として記憶する記憶部と、前記操作子が前記被操作部に接近又は接触した際に、前記初期値を基準として算出した静電容量変化に基づいて前記被操作部になされた操作を特定する特定部と、を備えることを特徴としている。
請求項7に記載の発明は、被操作部になされた操作を特定する操作入力装置が実行する入力検出方法であって、操作子が前記被操作部に接近または接触していない状態で、前記被操作部を含む周辺の物体との間の静電容量を検出する静電センサにより検出される静電容量を、前記被操作部の形体を変化させる形体変更部により変化された前記形体ごとに初期値として記憶する記憶工程と、前記操作子が前記被操作部に接近又は接触した際に、前記初期値を基準として算出した静電容量変化に基づいて前記被操作部になされた操作を特定する特定工程と、を含むことを特徴としている。
請求項8に記載の発明は、請求項7に記載の入力検出方法を、コンピュータにより実行させることを特徴としている。
以下、本発明の一実施形態にかかる操作入力装置を説明する。本発明の一実施形態にかかる操作入力装置は、被操作部の形体を変化させる形体変更部と、被操作部を含む周辺の物体との間の静電容量を検出する静電センサと、を備えている。さらに、操作子が被操作部に接近又は接触していない状態で静電センサにより検出される静電容量を、被操作部の形体ごとに初期値として記憶する記憶部と、操作子が被操作部に接近又は接触した際に、初期値を基準として算出した静電容量変化に基づいて被操作部になされた操作を特定する特定部と、を備えている。このようにすることにより、静電容量が変化する形体に応じてその初期値を取得して記憶することができる。そのため、この初期値を利用して操作を特定することで、被操作部が変形等により静電容量が変化する場合であっても、その影響を受けずに適切に操作を特定することができる。
また、静電センサは、当該静電センサ上の複数の領域のそれぞれについて静電容量を検出可能であって、記憶部は、複数の領域のそれぞれに対応する初期値を記憶してもよい。このようにすることにより、被操作部における形体の変化する領域と変化しない領域とに分けて初期値を取得して記憶することができる。
また、記憶部は、操作子が被操作部に接近又は接触していない状態で形体変更部が被操作部の形体を変化させた際に、静電センサが検出した静電容量を初期値として記憶してもよい。このようにすることにより、形体が変化した時点の静電容量を記憶することができる。
また、形体変更部及び記憶部を制御する制御部を備え、制御部は、被操作部が形体を順次変化させるように形体変更部を制御し、操作子が被操作部に接近又は接触していない状態で被操作部の形体が変化する度に、静電センサが検出した静電容量を記憶部に記憶させてもよい。このようにすることにより、順次形体を変化させて、その形体に対応した静電容量を記憶させることができる。
また、特定部は、操作子の被操作部への接近又は接触に起因する静電容量変化に基づいて操作子の接近位置又は接触位置を算出し、当該接近位置又は接触位置に基づいて被操作部になされた操作を特定してもよい。このようにすることにより、形体に応じた初期値によって形体の変化による静電容量の変化の影響を無くして静電容量により操作を特定することができる。
また、形体変更部は、被操作部の一以上の領域を変形させるための駆動部を含んでいてもよい。このようにすることにより、被操作部を、操作の態様に応じて適宜変形させることができる。
また、本発明の一実施形態にかかる入力検出方法は、操作子が被操作部に接近または接触していない状態で、被操作部を含む周辺の物体との間の静電容量を検出する静電センサにより検出される静電容量を、被操作部の形体を変化させる形体変更部により変化された形体ごとに初期値として記憶する記憶工程を含んでいる。また、操作子が被操作部に接近又は接触した際に、初期値を基準として算出した静電容量変化に基づいて被操作部になされた操作を特定する特定工程を含んでいる。このようにすることにより、静電容量が変化する形体に応じてその初期値を取得して記憶することができる。そのため、この初期値を利用して操作を特定することで、被操作部が変形等により静電容量が変化する場合であっても、その影響を受けずに適切に操作を特定することができる。
また、上述した操作入力方法をコンピュータにより実行させる入力検出プログラムとしてもよい。このようにすることにより、コンピュータを用いて、被操作部の形体に応じてその初期値を取得して記憶することができる。そのため、この初期値を利用して操作を特定することで、被操作部が変形等により静電容量が変化する場合であっても、その影響を受けずに適切に操作を特定することができる。
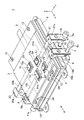
本発明の第1の実施例にかかる操作入力装置を図1〜図4を参照して説明する。操作入力装置1は、図1及び図2に示したように、窓付パネル2と、静電センサ3と、ホルダ4と、荷重センサ5と、モータホルダ6、7と、モータ8、10と、モータの出力軸9、11、12と、窓付パネル固定ねじ13と、ボタン14、15、16、17と、ボタン押上げレバー18、19、20、21と、モータホルダ固定ねじ22と、表面シート23と、ボス24と、を備えている。
図1、図2において、ボタン押上げレバー18、19、20、21が移動する方向をx方向、ボタン14、15、16、17が移動(突没)する方向をz方向、x方向とz方向と直交する方向をy方向と呼ぶ。
窓付パネル2は、樹脂等で形成された略板状のパネルであり、開口として複数の窓部2aが形成されている。複数の窓部2aからは、後述するボタン14、15、16、17の表面部14a、15a、16a、17aが露出する。窓付パネル2は、複数の窓付パネル固定ねじ13で静電センサ3と固定されている。また、窓付パネル2は、後述するボタン押上げレバー18、19、20、21がx方向に移動する溝が形成されている。
静電センサ3は、窓付パネル2の下層(表面シート23と相対しない側)に重ねて配置されている。静電センサ3は、電極がメッシュ状に張り巡らされた平板センサ部と、所定電圧を電極に印加して、電極に流れる微少電流を検出することで、平板センサ部上の各位置に対する周辺物体の寄生静電容量に相当する値を算出する検出回路部を備える。つまり、静電センサ3は、当該静電センサ3上の複数の座標位置(領域)のそれぞれについて静電容量を検出可能に構成されている。そして、静電センサ3は、使用者の指先等の操作子と導電膜の間での静電容量の変化を捉えて操作子の接触位置を検出する周知のデバイスである。
ホルダ4は、板金等で形成され、窓付パネル2と、静電センサ3と、荷重センサ5と、が載置固定される。また、ホルダ4は、モータホルダ6、7を介してモータ8、10を固定する。
荷重センサ5は、静電センサ3とホルダ4との間に複数配置される(図2を参照)。複数の荷重センサ5は、荷重がかかる方向(押圧される方向)と直交する方向(図1のx方向、y方向、図2のx方向)に離間して配置される。本実施例では、静電センサ3の四隅に配置されている。なお、荷重センサ5は例えばボタン15等が押圧されることによる荷重を検出できれば、任意の位置に任意の個数を配置してよい。荷重センサ5は、例えばひずみセンサや圧電センサ等、静電センサ3にかかる荷重を検出することができれば特に限定されない。
モータホルダ6は、複数のモータホルダ固定ねじ22によりホルダ4に固定されている。モータホルダ6は、モータ8を固定する。モータホルダ7は、複数のモータホルダ固定ねじ22によりホルダ4に固定されている。モータホルダ7は、モータ10を固定する。
モータ8は、モータホルダ6に固定されている。モータ8は、その出力軸9を回転させることによって、後述するボタン押上げレバー19をx方向に移動させる。出力軸9には、ねじ溝が形成され、そのねじ溝がボタン押上げレバー19に設けられているナットと螺合している。したがって、モータ8の出力軸9が回転すると、ナットがねじ溝を移動することによりボタン押上げレバー19が移動する。なお、出力軸9の先端部にはボタン押上げレバー19の移動を規制するストッパ9aが形成されている。
モータ10は、モータホルダ7に固定されている。モータ10は、その出力軸11を回転させることによって、後述するボタン押上げレバー18をx方向に移動させる。出力軸11には、ねじ溝が形成され、そのねじ溝がボタン押上げレバー18に設けられているナットと螺合している。出力軸11の先端部にはボタン押上げレバー18の移動を規制するストッパ11aが形成されている。
なお、操作入力装置1は、上述したモータ8、10以外にも、ボタン押上げレバー19、20をx方向に移動させるためにモータを備えている。そして、これらのモータもモータ8、10と同様に出力軸を回転させることによってボタン押上げレバー19、20をx軸方向に移動させる。例えば、図1では、ボタン押上げレバー19を移動させるモータの出力軸12が図示されている。
ボタン14は、静電センサ3上に載置されている(図2を参照)。ボタン14は、窓付パネル2の窓部2aから表面部14aが露出する。ボタン14は、ボタン押上げレバー18により、窓部2aから突没するように(z方向に)移動する。
ボタン15は、静電センサ3上に載置されている(図2を参照)。ボタン15は、窓付パネル2の窓部2aから表面部15aが露出する。ボタン15は、ボタン押上げレバー19により、窓部2aから突没するように(z方向に)移動する。
ボタン16、17も同様に静電センサ3上に載置され、窓付パネル2の窓部2aから表面部16a、17aが露出する。ボタン16は、ボタン押上げレバー20により、窓部2aから突没するように移動する。ボタン17は、ボタン押上げレバー21により、窓部2aから突没するように移動する。
ボタン押上げレバー18は、本体部18aと、レバー部18bと、を有している。本体部18aは、一方の端部は、図2に示したように、出力軸11が貫通する。そのため、出力軸11が貫通する孔が設けられている。この孔は、上述したようにナットとして機能して、出力軸11に形成されたねじ溝と螺合している。レバー部18bは、本体部18aの他方の端部からボタン14の配置位置に向かって延在している。レバー部18bは、本体部18aの移動に伴って図2の右方向に移動すると、窓付パネル2に形成された溝を通って、ボタン14と静電センサ3との間に進入してボタン14を窓部2aから突出する方向(z方向)に移動させる。レバー部18bは、その先端部がテーパー状に形成されており、ボタン14と静電センサ3との間に進入し易くなっている。また、レバー部18bは、本体部18aの移動に伴って図2の左方向に移動すると、窓付パネル2に形成された溝を通って、ボタン14と静電センサ3との間から抜け出してボタン14を窓部2aへ没する方向に移動させる。
ボタン押上げレバー19は、本体部19aと、レバー部19bと、を有している。本体部19aは、一方の端部には、図2に示したように、出力軸9が貫通する。そのため、出力軸9が貫通する孔が設けられている。この孔は、上述したようにナットとして機能して、出力軸9に形成されたねじ溝と螺合している。レバー部19bは、本体部19aの他方の端部からボタン15の配置位置に向かって延在している。レバー部19bは、本体部19aの移動に伴って図2の左方向に移動すると、窓付パネル2に形成された溝を通って、ボタン15と静電センサ3との間に進入してボタン15を窓部2aから突出する方向(z方向)に移動させる。レバー部19bは、その先端部がテーパー状に形成されており、ボタン15と静電センサ3との間に進入し易くなっている。また、レバー部19bは、本体部19aの移動に伴って図2の右方向に移動すると、窓付パネル2に形成された溝を通って、ボタン15と静電センサ3との間から抜け出してボタン15を窓部2aへ没する方向に移動させる。
ボタン押上げレバー20は、本体部20aと、レバー部20bと、を有している。本体部20aは、一方の端部にモータの出力軸が貫通する孔が設けられている。この孔は、上述したようにナットとして機能して、出力軸に形成されたねじ溝と螺合している。レバー部20bは、本体部20aの他方の端部からボタン16の配置位置に向かって延在している。レバー部20bは、本体部20aの移動に伴って移動することで、ボタン16を窓部2aから突出する方向に移動させたり、窓部2aへ没する方向に移動させたりする。レバー部20bは、その先端部がテーパー状に形成されており、ボタン16と静電センサ3との間に進入し易くなっている。
ボタン押上げレバー21は、本体部21aと、レバー部21bと、を有している。本体部21aは、一方の端部にモータの出力軸が貫通する孔が設けられている。この孔は、上述したようにナットとして機能して、出力軸に形成されたねじ溝と螺合している。レバー部21bは、本体部21aの他方の端部からボタン17の配置位置に向かって延在している。レバー部21bは、本体部21aの移動に伴って移動することで、ボタン17を窓部2aから突出する方向(z方向)に移動させたり、窓部2aへ没する方向に移動させたりする。レバー部21bは、その先端部がテーパー状に形成されており、ボタン17と静電センサ3との間に進入し易くなっている。
ボタン押上げレバー18、19、20、21は、表面シート23(操作面)と静電センサ3の間に配置され、操作面内の夫々独立した複数の領域を夫々個別に押し上げ可能な押上げ部として機能する。なお、ボタン押上げレバー18、19、20、21は、各レバー部の移動のために各レバー部と静電センサ3との間に微小な隙間を有している。
即ち、モータ8、10、ボタン押上げレバー18、19、20、21は、ボタン14、15、16、17を突没(被操作部の一部の形体を変化)させるための形体変更部(駆動部)として機能する。
表面シート23は、窓付パネル2の表面(静電センサ3と相対する面と反対側の面)に設けられている。表面シート23は、弾力性を有し、ボタンが押し上げられると伸びて隆起し、各ボタンが押し上げられていない際には平面状を維持する。表面シート23は、窓付パネル2を被覆してボタン14、15、16、17の抜け防止や、窓付パネル固定ねじ13及びボス24等の目隠し板としての機能も果たす。したがって、表面シート23の表面が操作面(被操作部)となる。なお、表面シート23は無くてもよい。その場合は、窓付パネル2の表面及び各ボタンの表面部が操作面(被操作部)となる。
即ち、表面シート23(被操作部)と静電センサ3とは離間して配置されている。また、各ボタンが押し上げられたときは、各ボタンは静電センサ3と離間して配置されることとなる。
ボス24は、窓付パネル2を静電センサ3に固定する際の位置決め用に設けられている。本実施例では、ボス24は2つ設けられている。つまり、窓付パネル2と静電センサ3には、ボス24が貫通する孔(ボス穴)が形成されており、ボス24が、それらの孔を貫通することで窓付パネル2と静電センサ3との位置決めがなされる。
上述した構成の操作入力装置1は、例えば、ボタン14が操作可能な場合は、ボタン押上げレバー18によりボタン14を窓付パネル2から突出させる。すると、使用者等は、操作可能なボタンを手探りで識別することができる。そして、ボタン14が使用者等に押圧された場合は、ボタン14に対応付けられた操作内容を示す動作をすることができる。
次に、本実施例の操作入力装置1の機能的構成を図3を参照して説明する。
図3に示したように、操作入力装置1は、図1に示した構成に加えて、操作入力制御部102を備えている。
操作入力制御部102は、操作対象となるボタンの位置を例えばナビゲーション装置等の操作される装置から取得し、モータ8等を制御することで、対応するボタンを突出させる。また、操作入力制御部102は、静電センサ3が検出した指の接触位置(座標)と、荷重センサ5が検出した荷重値と、に基づいて実際の操作(押圧)されたボタンを特定する。また、操作入力制御部102は、静電センサ3が検出した座標について、ボタン14〜17が操作(押圧)と判定する座標の範囲(操作有効領域)が各ボタン毎に設定されている。即ち、ボタン押上げレバー18〜21(押上げ部)により押し上げられた領域を、操作有効領域として設定している。
次に、上述した構成の操作入力装置1の動作(初期値キャリブレーション)について図4を参照して説明する。なお、以下の説明においては操作子としてユーザ等の指で説明するが、指には限定されず導電性のタッチペン等であってもよい。
静電センサ3上には、位置が変化する構造物(ボタン押上げレバー18等、ボタン15等、表面シート23)が存在するため、ボタン15等の押し上げのパターン(形体)によって、静電センサ3が検出する寄生静電容量(に相当する値)が変化してしまう。そこで、以下に説明する初期値キャリブレーションを行う。
図4に初期値キャリブレーション動作のフローチャートを示す。このフローチャートは操作入力制御部102で実行される。なお、この初期値キャリブレーション動作は、ユーザ等が指で操作入力装置1の操作面に触れない状態で実行する。
まず、出荷時やユーザ等による指定により初期値キャリブレーションの指示が入力されると(ステップS101)、操作入力制御部102は、ボタン14〜17の押上げパターンの1つのパターンについて実行する(ステップS102)。つまり、ボタン14〜17がそれぞれ単独で押し上げられるパターンや複数のボタンが押し上げられるパターン等の複数のパターンのうちの一のパターンについて、その状態になるようにモータ8、10等を駆動する。
次に、ステップS102で実行されたパターンについての寄生静電容量を静電センサ3から取得し、対応するパターンと関連付けて初期値として操作入力制御部102内に記憶する(ステップS103)。そして、全パターンについて寄生静電容量の記憶が終了した場合は初期値キャリブレーションを終了し(ステップS104:Y)、そうでない場合は次のパターンについて寄生静電容量の検出と記憶を行うために順次形体を変化させる(ステップS104:N)。なお、この記憶の際は静電容量が検出される座標位置(領域)ごとに記憶する。
即ち、操作入力制御部102は、指(操作子)がボタン15等(被操作部)に接近又は接触していない状態で静電センサ3により検出される静電容量をパターン(形体)ごとに初期値として記憶する記憶部として機能する。
このようにして、操作入力制御部102は、全ての押し上げパターンに対応する位置座標ごとの寄生静電容量を、予め初期値として記憶してすることができる。そして、操作入力装置1の使用時(通常使用時)には、ボタン15等を押し上げた(突出させた)際に、対応する押し上げパターンの初期値を読み出して、これを基準として指が触れた際の静電容量変化を算出し、その算出された静電容量変化に基づいて指が触れた位置を特定してボタン15等の操作を検出する。
通常使用時の具体例としては、ボタン15が押し上げられた場合には、そのボタン15が押されたと判定する座標の範囲が予め定められており、指が操作入力制御部102の操作面に接触したことを静電容量変化によって検出すると、その静電容量の変化が最も大きい座標位置を押された位置と算出する。そして、その算出された位置がボタン15が押されたと判定する座標の範囲にある場合は、ボタン15が押されたと特定する。
なお、ボタン15等の操作の検出は、荷重センサ5で検出された荷重値が所定以上であった場合に、静電容量変化に基づき算出された位置に対応するボタンが確実に押し込まれていると判定して、操作を確定することができる。
即ち、操作入力制御部102は、指(操作子)がボタン15等(被操作部)に接近又は接触した際に、初期値を基準として算出した静電容量変化に基づいてボタン15等(被操作部)になされた操作を特定する特定部として機能する。
図4のフローチャートから明らかなように、本実施例においては、ステップS103が記憶工程となる。なお、図4のフローチャートは、初期値の取得のみであるので、上述した通常使用時やその具体例の動作が特定工程となる。
本実施例によれば、操作入力装置1は、ボタン15等を突没させるボタン押上げレバー18等、モータ8等と、ボタン15等を含む周辺の物体との間の静電容量を検出する静電センサ3と、を備えている。さらに、指がボタン15等に接近又は接触していない状態で静電センサ3により検出される静電容量を、ボタンが突没した形体ごとに初期値として記憶する操作入力制御部102を備え、この操作入力制御部102は、指がボタン15等に接近又は接触した際に、初期値を基準として算出した静電容量変化に基づいてボタン15等になされた操作を特定する。このようにすることにより、静電容量が変化する形体に応じてその初期値を取得して記憶することができる。そのため、この初期値を利用して指がボタン15等に接近又は接触したことで生じる静電容量変化のみを検出可能となり、この静電容量変化に基づいて操作を特定することで、被操作部が変形等により静電容量が変化する場合であっても、その影響を受けずに適切に操作を特定することができる。
また、静電センサ3は、当該静電センサ上の複数の領域のそれぞれについて静電容量を検出可能であって、操作入力制御部102は、静電センサ3が検出可能な座標位置(領域)のそれぞれに対応する初期値を記憶している。このようにすることにより、ボタン14が突没することにより形体の変化する領域と変化しない領域とに分けて初期値を取得して記憶することができる。
また、操作入力制御部102は、ボタン15等の突没状態を順次変化させるようにボタン押上げレバー18等、モータ8等を制御し、指がボタン15等に接近又は接触していない状態でボタン15等が突没する度に、静電センサ3が検出した静電容量を記憶している。また、操作入力制御部102は、指がボタン15等に接近又は接触していない状態でボタン押上げレバー18等、モータ8等がボタン15等を突没させた際に、静電センサ3が検出した静電容量を初期値として記憶している。このようにすることにより、形体が変化した時点の静電容量を記憶することができる。
また、操作入力制御部102は、指に起因する静電容量変化に基づいて指の接近位置又は接触位置を算出し、当該接近位置又は接触位置に基づいてボタン15等になされた操作を特定している。このようにすることにより、形体に応じた初期値によって形体の変化による静電容量の変化の影響を無くして静電容量により操作を特定することができる。
また、ボタン14〜17の一以上を突出させるための駆動部であるモータ8、10、ボタン押上げレバー18〜21を備えている。このようにすることにより、ボタン14〜17を、操作の態様に応じて適宜突出させることができる。
次に、本発明の第2の実施例にかかる操作入力装置を図5〜図11を参照して説明する。なお、前述した第1の実施例と同一部分には、同一符号を付して説明を省略する。
本実施例では、有効操作領域調整動作について説明する。図1等に示した操作入力装置1は、静電センサ3上に構造物が存在するために、指と静電センサ3との距離が離れざるを得ないため、静電センサ3の静電容量の検出感度を高く設定せざるを得ない。このため、静電センサ3は、指の操作面に接していない部分に対する寄生容量を検出してしまう場合がある。このような現象は、特に操作面に対して指が平行に近い状態で接近するほど、指の操作面に接していない部分の影響が大きくなる。
このように、指が操作面に対して傾いている方向(操作子が被操作部に沿って延在する方向)に亘って静電容量変化が検出されるため、指のタッチ位置座標が、指の傾き方向にズレて検出される傾向がある。そこで、操作入力する指の操作面に対する角度に起因する操作位置のズレを踏まえて、操作領域(操作ボタン15等)の有効判定領域を調整する。
図5に有効操作領域調整動作のフローチャートを示す。このフローチャートは操作入力制御部102で実行される。
まず、操作入力装置1が起動(システム起動)されると(ステップS201)、ナビゲーション装置等に連動して操作可能とするボタン15等をモータ8、10等を駆動させて突出させるとともに、そのボタン15等が操作されていると認識する領域(有効操作領域)の初期値を設定する(ステップS202)。図6に有効操作領域の例を示す。図6において、ボタン15〜17それぞれの周囲に破線で示した領域A〜Cが各ボタンが突出した際の有効操作領域となる。
次に、実際にユーザ等が指で操作をした際の静電容量変化を静電センサ3から取得する(ステップS203)。静電センサ3における静電容量変化の例を図7を参照して説明する。図7は、静電センサ3を図1のz方向から見た模式図であり、各領域内の数字が当該位置における静電容量の変化量を示している。符号Fは指を示している。
図7において、指Fは図8に示すように、操作面である表面シート23に対して図中右側に傾けるようにして触れている。また、操作入力装置1は、静電センサ3との間に表面シート23等の構造物があるため、静電センサ3の検出感度を高めている。そのため、静電センサ3は、指Fが触れた位置だけでなく、指Fが触れていない部分についても表面シート23に近い部分については静電容量が変化する。
即ち、操作入力制御部102は、ボタン15等(被操作部)と離間して配置された静電センサ3の出力に基づいて、当該ボタン15等(被操作部)へ近接又は接触する指(操作子)に起因する静電容量変化を検出する第1検出部として機能する。
次に、荷重センサ5が検出した荷重値が所定以上か否かで操作入力の有無を判断し、操作入力無しと判断された場合はステップS203に戻る(ステップS204:N)。一方、操作入力有りと判断された場合は(ステップS204:Y)、指Fの方向を算出する(ステップS205)。指Fの方向の算出について図9を参照して説明する。
即ち、操作入力制御部102は、静電容量変化に基づいて、指(操作子)が表面シート23(被操作部)に沿って延在する方向を検出する第2検出部として機能する。また、操作入力制御部102は、荷重センサ5によって所定以上の荷重で押された場合に、指(操作子)によるボタン15等(被操作部)への操作入力がなされたとして、指(操作子)がボタン15等(被操作部)に沿って延在する方向を検出している。
図9の網掛け部分は、静電容量の変化が生じている領域の形状を幾何学的に解析した結果である。そして、最大の静電容量変化が生じている領域を基準に図8の(1)〜(8)の8方向のどの方向に静電容量の変化が生じている領域が伸びているかを解析する。図8の場合は(4)の方向に伸びていることが分かる。なお、図8では8方向としているが、8方向よりも少なくしてもよいし多くしてもよい。
次に、ステップS205で算出された指の方向に基づいてステップS202で初期設定した有効操作領域を調整する(ステップS206)。調整の例を図10及び図11に示す。図10は、静電容量の変化が生じている領域が伸びている方向へ有効操作領域を拡張した様子を示している。なお、拡張ではなく、その方向へ有効操作領域を移動させるようにしてもよい。即ち、操作入力制御部102は、ボタン15等(被操作部)に沿って延在する方向に応じてボタン15等(被操作部)の有効操作領域を調整する調整部として機能する。図9に示す静電容量変化が検出された場合は、静電容量の変化が生じている領域が伸びている方向が(4)であるから、図10(4)が示す方向に有効操作領域が拡張される。
図10に示した領域拡張を図6に示した有効操作領域A〜Cに適用した例を図11に示す。図11の領域A1〜C1が拡張された領域である。なお、この処理は、例えば突出させているボタンに対応する有効操作領域のみに行ってもよい。
一方、ステップS205、S206と平行して、例えば最大の静電容量変化を検出した座標をタッチ位置座標として算出する(ステップS207)。なお、タッチ位置座標は、隣接する所定の複数座標からなる領域の容量変化値の合計を算出し、その合計が最大となった領域の中心としてもよい。
そして、ステップS207で算出したタッチ位置座標がステップS206で調整した有効操作領域の範囲にあるか判定し(ステップS208)、ステップS208の結果有効操作領域に含まれると判定した場合は、その有効範囲に対応するボタン15等の操作に応じたコマンドをナビゲーション装置等の操作される装置へ出力する(ステップS209)。そして、コマンド出力後は次の操作入力に備えてステップS203へ戻る。
即ち、操作入力制御部102は、ステップS208、S209を実行することにより、静電容量変化に基づいて特定した指(操作子)の近接又は接触の位置が、調整後の有効操作領域に対応するか判定する判定部として機能する。
また、図5のフローチャートから明らかなように、本実施例においては、ステップS203が第1検出工程、ステップS205が第2検出工程、ステップS206が調整工程、ステップS208、S209が判定工程として機能する。
本実施例によれば、操作入力装置1は、ボタン15等と離間して配置された静電センサ3の出力に基づいて、当該ボタン15へ近接又は接触する操作子に起因する静電容量変化を検出する操作入力制御部102を備えている。また、操作入力制御部102は、静電容量変化に基づいて、指がボタン15等に沿って延在する方向を検出し、その方向に応じてボタン15等の有効操作領域を調整する。そして、操作入力制御部102は、静電容量変化に基づいて特定した指の近接又は接触の位置が、調整後の有効操作領域に対応するか判定する。このようにすることにより、指等でボタン15等の操作面に対して傾けて押した場合に、その指の傾いた方向を検出することができる。そのため、指の傾き方向へのズレを考慮した検出をすることが可能となる。したがって、操作面であるボタン15等と静電センサ3の距離が離れた場合でも、精度良く操作された操作領域を判定できるため、操作面のデザイン及び操作入力装置の配置の自由度を高めることができる。
また、操作入力制御部102は、指がボタン15等に沿って延在する方向に有効操作領域を拡張している。このようにすることにより、指の傾き方向へのズレを考慮した検出をすることが可能となる。したがって、精度良く操作された操作領域を判定できる。
また、操作入力制御部102は、指によるボタン15等への操作入力がなされた際に、指がボタン15等に沿って延在する方向を検出している。このようにすることにより、入力操作がされたことが確定した時点の指の方向を検出するので、操作領域の判定制度を向上させることができる。
なお、突出量の大きいボタンと、突出量の小さいボタンとを設け、突出量の大きいボタンの有効領域の拡張量を、突出しないボタンの拡張量よりも大きく設定してもよい。即ち、複数のボタン15等(操作対象)を備え、操作入力制御部102(調整部)は、ボタン15等(操作対象)の突出量(静電センサに対する離間量)が大きいほど、当該ボタン15等(操作対象)に対応する有効操作領域の調整量を大きくする。これは、例えばレバー部19bの厚みを徐々に変化させることで、レバー部19bの移動量に応じてボタン15の突出量、即ち離間量を変化させることができる。
このように動作させると、ボタン15等の突出量が大きくなるほど指が接触している部分とそうでない部分とで検出される静電容量に差異が少なくなる。言い換えれば、指の操作面に接していない部分に対する寄生容量の影響により、指のタッチ位置座標が指の傾き方向にズレて検出される傾向が強くなる。そこで、有効操作領域を広げるように調整することで、このような場合でも精度良く操作領域を判定することができる。また、このように突出量をボタン毎に異ならせることで、ボタン毎に複数の突出量を設定することができ、その突出量でボタン等の識別が可能となる。
次に、本発明の第3の実施例にかかる操作入力装置を図12を参照して説明する。なお、前述した第1の実施例と同一部分には、同一符号を付して説明を省略する。
本実施例では、押圧前座標取得動作について説明する。静電センサ3上の構造物のうち例えばボタン15等は、それらが変位可能に構成されているため、それぞれのパーツの間に、わずかな隙間を設けて配置されている。このため、操作面に指が軽く触れている時に対して、操作面を指で押圧した時には、パーツ間の隙間が詰まったり、構造物自体の変形などによって、静電センサ3に対する寄生容量が変化してしまう場合がある。つまり、操作面の同じ位置に指が触れている場合であっても、指が軽く接触している時と、操作面を指で強く押圧した時とで、静電センサ3は、異なる座標位置を検出してしまうという現象が発生し得る。
そこで、荷重センサ5が、接触閾値(操作面への指の軽い接触を検出する閾値)より大きい押圧荷重を検出した際に、検出された指のタッチ位置座標を記憶しておき、荷重センサ5が続けて確定閾値(操作入力有りを検出する閾値)を超えた場合に、先に記憶していたタッチ位置座標での操作入力があったと判定する。即ち、接触閾値が第2閾値、確定閾値が第1閾値となる。
図12に押圧前座標取得動作(入力操作方法)のフローチャートを示す。このフローチャートは操作入力制御部102で実行される。
まず、操作入力装置1が起動(システム起動)されると(ステップS301)、ナビゲーション装置等に連動して操作可能とするボタン15等をモータ8、10等を駆動させて突出させるとともに、そのボタン15等が操作されていると認識する領域(有効操作領域)の初期値を設定する(ステップS302)。ステップS302は、基本的に上述したステップS202と同様である。
次に、操作面に指が接近又は接触しているときの静電容量の変化からタッチ位置座標を静電センサ3から取得し(ステップS303)、荷重センサ5から荷重値を取得する(ステップS304)。タッチ位置座標は、例えば上述したステップS207と同様の最大の静電容量変化を検出した座標を操作位置座標として算出すればよい。即ち、操作入力制御部102が静電センサの出力に基づいて、ボタン15等(被操作部)へ接触する指(操作子)の接触位置を検出する接触位置検出部として機能する。
次に、ステップS304で取得した荷重値が接触閾値よりも大きいか否かを判断し、小さい場合はステップS303に戻り(ステップS305:N)、大きい場合は(ステップS305:Y)直近のタッチ位置座標をタッチ位置座標Oとして保存する(ステップS306)。このタッチ位置座標Oが第1接触位置となる。即ち、操作入力制御部102(特定部)は、荷重センサ5が検出する押圧荷重が確定閾値(第1閾値)より小さい接触閾値(第2閾値)を超えた際のタッチ位置座標O(第1接触位置)を取得している。
なお、ステップS306は、荷重センサ5の検出値により判断しているが、例えば、静電センサ3の検出結果に基づく静電容量変化の大きさが一定以上となったか否かで判断してもよい。
次に、再度荷重センサ5から荷重値を取得し(ステップS307)、荷重値が確定閾値よりも大きいか否かを判断する。判断の結果、荷重値が確定閾値よりも小さい場合は(ステップS308:N)、その荷重値が接触閾値よりも大きいか否か再度判断し、接触閾値よりも大きい場合は(ステップS309:Y)、再度荷重値を取得すべくステップS307に戻る。
ステップS309の判断の結果、荷重値が接触閾値よりも小さいと判断された場合は(ステップS309:N)、荷重値が接触閾値よりも大きくなった後に小さくなったこととなる。つまり、指による操作が中断されたと見做してステップS303に戻る。即ち、ステップS308、S309は、操作入力制御部102が、荷重センサ5が検出する押圧荷重が接触閾値(第2閾値)を超えた後に、当該接触閾値(第2閾値)以下となることなく確定閾値(第1閾値)を超えたことを検出している。
ステップS308の判断の結果、荷重値が確定閾値よりも大きいと判断された場合は(ステップS308:Y)、現時点のタッチ位置座標Gを取得する(ステップS310)。即ち、操作入力制御部102は、確定閾値(第1閾値)を超えた際に検出したタッチ位置座標G(第2接触位置)を取得している。
次に、ステップS306で記憶したタッチ位置座標OとステップS301で取得したタッチ位置座標Gとを比較する。この比較においては、例えば座標の差分が所定範囲内に収まっているか否かを判定する。この差分が所定範囲内に収まっていない場合は、指が操作面に接触してから押し込むまでに指の位置がスライドしたと判定し、本実施例では、このような場合は操作を受け付けない(ステップS311:N)。なお、ステップS310およびステップS311は、任意に採用できる工程であり省略してもよい。その場合、ステップS308の判断が肯定であれば、ステップS312に進めばよい。
ステップS306で比較した座標の差が所定範囲内である場合は(ステップS311:Y)、タッチ位置座標Oから選択領域を確定し、どのボタン15等が操作されたかを決定(特定)し(ステップS312)、決定したボタン15等の操作に応じたコマンドをナビゲーション装置等の操作される装置へ出力する(ステップS313)。そして、コマンド出力後は次の操作入力に備えてステップS303へ戻る。ステップS311における所定範囲は、ボタン15等の構造物を押し込んだ際の静電容量の変化の程度に基づいて適宜設定すればよい。
即ち、操作入力制御部102は、押圧荷重が確定閾値(第1閾値)を超えた際に、ボタン15等(被操作部)になされた操作を特定する特定部として機能している。さらに、操作入力制御部102は、荷重センサ5が検出する押圧荷重が確定閾値(第1閾値)を超えた際に、押圧荷重が確定閾値(第1閾値)を超える前に検出されたタッチ位置座標O(第1接触位置)に基づいて、ボタン15等(被操作部)になされた操作を特定している。
図11のフローチャートから明らかなように、本実施例においては、ステップS303が接触位置検出工程、ステップS304、S307が荷重検出工程、ステップS312が特定工程として機能する。
本実施例によれば、操作入力装置1は、操作入力制御部102が、操作面である表面シート23と離間して配置された静電センサ3の出力に基づいて、ボタン15等へ接触する指のタッチ位置座標を検出する。また、操作入力制御部102は、指によるボタン15等への押圧荷重を検出する荷重センサ5と、押圧荷重が確定閾値を超えた際に、ボタン15等になされた操作を特定する。そして、操作入力制御部102は、押圧荷重が確定閾値を超える前に検出されたタッチ位置座標に基づいて、ボタン15等になされた操作を特定する。このようにすることにより、操作入力装置1が操作を特定する押圧荷重を検出する前のボタン15等への接触に基づいて操作を特定することができる。つまり、確定閾値よりも小さい力で触れたタッチ位置座標に基づいて操作を特定するので、ボタン15等への力加減によらず適切な操作位置を検出することができる。したがって、被操作部等の操作面の部材や強度等の選択に幅を持たせることができ、デザインの自由度を高めることができる。
操作入力制御部102は、荷重センサ5が検出する押圧荷重が確定閾値より小さい接触閾値を超えた際のタッチ位置座標Oを取得し、荷重センサ5が検出する押圧荷重が確定閾値を超えた際に、このタッチ位置座標Oに基づいて、ボタン15等になされた操作を特定している。このようにすることにより、操作入力制御部102が操作を特定する押圧荷重を検出する前である接触閾値を超えた際のタッチ位置座標Oに基づいて操作を特定することができる。つまり、タッチ位置は、指が軽く接触している時のタッチ位置を基準とし、操作の特定は、操作面を指で強く押圧した時として、それぞれの役割を分けているために加減によらず適切な操作位置を検出することができる。また、軽く触れているときのタッチ位置に基準としているので、構造物の変形等の影響を受けないようにすることができる。
また、操作入力制御部102は、荷重センサ5が検出する押圧荷重が接触閾値を超えた後に、当該接触閾値以下となることなく確定閾値を超えた際に、タッチ位置座標Oに基づいて、ボタン15等になされた操作を特定している。このようにすることにより、荷重が増加し続けて確定閾値を超えた場合にのみ動作を特定することができる。つまり、一度の押圧操作を検出して、操作を特定することができるようになる。
また、操作入力制御部102は、確定閾値を超えた際に検出したタッチ位置座標Gを取得し、タッチ位置座標Gとタッチ位置座標Oとを比較し、それらの座標の差分が所定範囲内である場合に、タッチ位置座標Oに基づいてボタン15等になされた操作を特定している。このようにすることにより、指が操作面に接触させながら、指の位置をスライドしてボタンを選び直したような場合に発生し得る誤操作を抑制することができる。
また、ボタン14〜17の一以上を突出させるための駆動部であるモータ8、10、ボタン押上げレバー18〜21を備えている。このようにすることにより、ボタン15等について、押圧した場合に力加減によらず適切な操作位置を検出することができる。
なお、第1の実施例〜第3の実施例の処理は組み合わせてもよい。
また、上述した実施例2、3では、突出させたボタン15等のみを操作対象として説明したが、突出させないボタン15等も操作対象に含めても良い。例えば、場面に応じて使用頻度の高いボタンのみを突出させてユーザの利便性を図りつつ、突出させないボタンについても操作可能としてもよい。この場合に、操作入力制御部102は、例えば突出させたボタン14のみについて、第2の実施例で説明した有効操作領域調整を適用してもよい。具体的には、例えば突出したボタン14のみについては、ボタン14と静電センサ3との距離が大きいので、有効領域を拡張するなどとすればよい。
また、操作入力装置は、ボタンの押し上げ機構を備えなくともよい。例えばデザイン上の制約で、操作面(指が触れる面)に対して静電センサ3を離間して配置した場合に、第2の実施例で説明した有効操作領域調整を適用すれば、指でどの方向から操作された場合であっても、適切に操作面の所定位置が操作されたことを判定することができる。これは、図1等の構成であれば、ボタン14〜17以外の領域について有効操作領域調整を適用できることを意味する。このようにすることにより、例えば操作入力装置1が車両のセンターコンソールに配置された場合は、運転席/助手席からの操作に適切に対応し、ハンドルに配置された場合は、運転者のハンドルの握り位置の違いに適切に対応できる。
また、操作入力装置は、ボタンの押し上げ機構を備えなくともデザイン上の制約等で操作面に変形し易い部材を使用した場合は、第3の実施例で説明した押圧前座標取得を適用することで、押圧により操作面が変形しても、適切に操作面のいずれの位置が操作されたかを判定することができる。これは、図1等の構成であれば、窓付パネル2が変形し易い場合に、ボタン14〜17以外の領域について押圧前座標取得を適用できることを意味する。
また、操作入力装置は、操作面への指が接触しなくても、ある程度接近したことをもって、操作入力がなされたと判定してもよい。この場合、荷重センサ5を備えず、静電センサ3が検出した静電容量変化の最大値が、所定値以上となった場合に、指が操作面にある程度接近した(=操作入力有り)と判定させればよい。この場合も第1の実施例や第2の実施例で説明した処理を組み合わせて、または単独で、適用すれば、適切にいずれの位置が操作されたかを判定することができる。
また、本発明は上記実施例に限定されるものではない。即ち、当業者は、従来公知の知見に従い、本発明の骨子を逸脱しない範囲で種々変形して実施することができる。かかる変形によってもなお本発明の操作入力装置の構成を具備する限り、勿論、本発明の範疇に含まれるものである。
1 操作入力装置
3 静電センサ
5 荷重センサ
8 モータ(駆動部)
10 モータ(駆動部)
14 ボタン(被操作部)
15 ボタン(被操作部)
16 ボタン(被操作部)
17 ボタン(被操作部)
18 ボタン押上げレバー(駆動部)
19 ボタン押上げレバー(駆動部)
20 ボタン押上げレバー(駆動部)
21 ボタン押上げレバー(駆動部)
23 表面シート(被操作部)
102 操作入力制御部(接触位置検出部、特定部)
3 静電センサ
5 荷重センサ
8 モータ(駆動部)
10 モータ(駆動部)
14 ボタン(被操作部)
15 ボタン(被操作部)
16 ボタン(被操作部)
17 ボタン(被操作部)
18 ボタン押上げレバー(駆動部)
19 ボタン押上げレバー(駆動部)
20 ボタン押上げレバー(駆動部)
21 ボタン押上げレバー(駆動部)
23 表面シート(被操作部)
102 操作入力制御部(接触位置検出部、特定部)
Claims (8)
- 被操作部の形体を変化させる形体変更部と、
前記被操作部を含む周辺の物体との間の静電容量を検出する静電センサと、
操作子が前記被操作部に接近又は接触していない状態で前記静電センサにより検出される静電容量を、前記被操作部の形体ごとに初期値として記憶する記憶部と、
前記操作子が前記被操作部に接近又は接触した際に、前記初期値を基準として算出した静電容量変化に基づいて前記被操作部になされた操作を特定する特定部と、
を備えることを特徴とする操作入力装置。 - 前記静電センサは、当該静電センサ上の複数の領域のそれぞれについて前記静電容量を検出可能であって、
前記記憶部は、前記複数の領域のそれぞれに対応する前記初期値を記憶する、
ことを特徴とする請求項1に記載の操作入力装置。 - 前記記憶部は、前記操作子が前記被操作部に接近又は接触していない状態で前記形体変更部が前記被操作部の前記形体を変化させた際に、前記静電センサが検出した静電容量を前記初期値として記憶することを特徴とする請求項1または2に記載の操作入力装置。
- 前記形体変更部及び前記記憶部を制御する制御部を備え、
前記制御部は、前記被操作部が前記形体を順次変化させるように前記形体変更部を制御し、前記操作子が前記被操作部に接近又は接触していない状態で前記被操作部の前記形体が変化する度に、前記静電センサが検出した静電容量を前記記憶部に記憶させることを特徴とする請求項3に記載の操作入力装置。 - 前記特定部は、前記操作子の前記被操作部への接近又は接触に起因する静電容量変化に基づいて前記操作子の接近位置又は接触位置を算出し、当該接近位置又は接触位置に基づいて前記被操作部になされた操作を特定することを特徴とする請求項1から4までのうちいずれか一項に記載の操作入力装置。
- 前記形体変更部は、前記被操作部の一以上の領域を変形させるための駆動部を含むことを特徴とする請求項1から5までのうちいずれか一項に記載の操作入力装置。
- 被操作部になされた操作を特定する操作入力装置が実行する入力検出方法であって、
操作子が前記被操作部に接近または接触していない状態で、前記被操作部を含む周辺の物体との間の静電容量を検出する静電センサにより検出される静電容量を、前記被操作部の形体を変化させる形体変更部により変化された前記形体ごとに初期値として記憶する記憶工程と、
前記操作子が前記被操作部に接近又は接触した際に、前記初期値を基準として算出した静電容量変化に基づいて前記被操作部になされた操作を特定する特定工程と、
を含むことを特徴とする入力検出方法。 - 請求項7に記載の入力検出方法を、コンピュータにより実行させることを特徴とする入力検出プログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017131202A JP2019016052A (ja) | 2017-07-04 | 2017-07-04 | 操作入力装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017131202A JP2019016052A (ja) | 2017-07-04 | 2017-07-04 | 操作入力装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2019016052A true JP2019016052A (ja) | 2019-01-31 |
Family
ID=65358475
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017131202A Pending JP2019016052A (ja) | 2017-07-04 | 2017-07-04 | 操作入力装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2019016052A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114442841A (zh) * | 2020-10-30 | 2022-05-06 | 星电株式会社 | 触摸感测装置 |
-
2017
- 2017-07-04 JP JP2017131202A patent/JP2019016052A/ja active Pending
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114442841A (zh) * | 2020-10-30 | 2022-05-06 | 星电株式会社 | 触摸感测装置 |
| JP7685824B2 (ja) | 2020-10-30 | 2025-05-30 | ホシデン株式会社 | タッチ入力装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2801892B1 (en) | Touch type input device and method for detecting touching of touch panel | |
| JPWO2019116490A1 (ja) | 操作支援装置、タッチパネル装置、及びタッチパネル入力システム | |
| US10108293B2 (en) | Touch-type input device | |
| US9691315B2 (en) | Touch-type input device | |
| EP2960756A1 (en) | Touch-type input device | |
| JP7203854B2 (ja) | 入力装置、制御方法及びプログラム | |
| JP2019016051A (ja) | 操作入力装置 | |
| JP5939225B2 (ja) | 静電容量式スイッチ | |
| CN113246729A (zh) | 操作装置 | |
| JP2019016052A (ja) | 操作入力装置 | |
| US11711078B2 (en) | On/off detection device and vehicle interior component | |
| US9377911B2 (en) | Input device | |
| WO2019220749A1 (ja) | 入力装置 | |
| JP6565856B2 (ja) | タッチ式入力装置 | |
| JPWO2019009138A1 (ja) | 操作入力装置 | |
| WO2023276300A1 (ja) | 入力装置 | |
| JP2017215866A (ja) | 入力装置 | |
| JP2018092315A (ja) | 操作入力装置 | |
| JP2013136296A (ja) | 車両用操作装置 | |
| JP2018092317A (ja) | 操作入力装置 | |
| US20160054843A1 (en) | Touch pad system and program for touch pad control | |
| CN110870204B (zh) | 用于机动车的操作设备,用于借助于操作设备运行机动车的方法,控制装置和机动车 | |
| JP2018190278A (ja) | 操作入力装置 | |
| JP2018092316A (ja) | 操作入力装置 | |
| WO2019215915A1 (ja) | 入力制御装置、表示入力装置及び入力制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20180305 |