JP2019010683A - ロボット制御装置およびロボットシステム - Google Patents
ロボット制御装置およびロボットシステム Download PDFInfo
- Publication number
- JP2019010683A JP2019010683A JP2017127388A JP2017127388A JP2019010683A JP 2019010683 A JP2019010683 A JP 2019010683A JP 2017127388 A JP2017127388 A JP 2017127388A JP 2017127388 A JP2017127388 A JP 2017127388A JP 2019010683 A JP2019010683 A JP 2019010683A
- Authority
- JP
- Japan
- Prior art keywords
- robot
- force detection
- detection device
- interface board
- robot control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/08—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices
- B25J13/085—Force or torque sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/02—Sensing devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1602—Programme controls characterised by the control system, structure, architecture
- B25J9/161—Hardware, e.g. neural networks, fuzzy logic, interfaces, processor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1628—Programme controls characterised by the control loop
- B25J9/1633—Programme controls characterised by the control loop compliant, force, torque control, e.g. combined with position control
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/37—Measurements
- G05B2219/37357—Force, pressure, weight or deflection
Abstract
【解決手段】力検出装置が設けられたロボットを制御するロボット制御装置であって、前記力検出装置と通信を行うインターフェース基板を接続可能な接続部を有する拡張用接続部を備えることを特徴とするロボット制御装置。また、前記拡張用接続部は、着脱可能であることが好ましい。また、前記拡張用接続部に接続する接続部を有する前記インターフェース基板を備えることが好ましい。
【選択図】図1
Description
前記力検出装置と通信を行うインターフェース基板を接続可能な接続部を有する拡張用接続部を備えることを特徴とする。
これにより、必要な場合にのみ拡張用接続部を設けることができる。
これにより、力検出装置とロボット制御装置との間で通信を行うことができる。
これにより、力検出装置の回路部品を削減し、力検出装置を小型化することができる。
これにより、拡張用接続部に他のインターフェース基板等を接続することができる。
前記ロボットを制御する本発明のロボット制御装置と、を備えることを特徴とする。
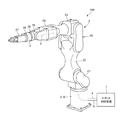
ロボット2の種類は、特に限定されないが、本実施形態では、ロボット2は、垂直多関節ロボットである。
ロボット制御装置1は、各制御を行う制御部7と、各情報を記憶する記憶部(図示せず)等を備えている。また、ロボット制御装置1は、例えば、CPU(Central Processing Unit)(図示せず)等が内蔵されたパーソナルコンピューター(PC)等で構成することができ、ロボット2の各駆動部等の各部を制御する。また、ロボット2を制御するプログラムは、記憶部に予め記憶されている。
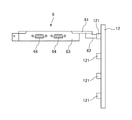
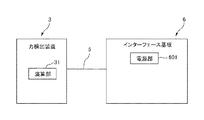
インターフェース基板6は、力検出装置3と通信を行う機能、すなわち、力検出装置3とロボット制御装置1とを通信可能に接続する機能を有している。
図6に示すように、インターフェース基板6は、ロボット制御装置1に供給される電力から力検出装置3に供給する電力を生成し、生成した電力を力検出装置3に供給する電源部601(電源)を有している。以下、具体的に説明する。
インターフェース基板6は、通信におけるアドレス設定を変更する機能を有している。
具体的には、インターフェース基板6は、アドレスを設定する複数のスイッチ(図示せず)を有している。この複数のスイッチのうちの所定のスイッチを「オン」にすると、所定のアドレス(例えば、アドレス「3」)が設定され、他の所定のスイッチを「オン」にすると、他の所定のアドレス(例えば、アドレス「7」)が設定される。このようにして、アドレス設定を変更することができる。
ロボット制御装置1は、ロボット2が行う作業において、各角度センサーの出力、力検出装置3の出力、すなわち、各角度センサーの検出情報(検出結果)、力検出装置3の検出情報(検出結果)等に基づいて、ロボット2の駆動(動作)を位置制御、力制御等で制御する。
図7は、本発明のロボットシステムの第2実施形態における力検出装置およびインターフェース基板の一部を示すブロック図である。
Claims (10)
- 力検出装置が設けられたロボットを制御するロボット制御装置であって、
前記力検出装置と通信を行うインターフェース基板を接続可能な接続部を有する拡張用接続部を備えることを特徴とするロボット制御装置。 - 前記拡張用接続部は、着脱可能である請求項1に記載のロボット制御装置。
- 前記拡張用接続部に接続する接続部を有する前記インターフェース基板を備える請求項1または2に記載のロボット制御装置。
- 前記インターフェース基板は、前記ロボット制御装置に供給される電力から前記力検出装置に供給する電力を生成する電源部を有する請求項1ないし3のいずれか1項に記載のロボット制御装置。
- 前記力検出装置が行う処理の一部を前記インターフェース基板で行う請求項1ないし4のいずれか1項に記載のロボット制御装置。
- 前記インターフェース基板は、アドレス設定を変更する機能を有する請求項1ないし5のいずれか1項に記載のロボット制御装置。
- 前記インターフェース基板は、複数の接続部を有する請求項1ないし6のいずれか1項に記載のロボット制御装置。
- 前記拡張用接続部は、複数の接続部を有する請求項1ないし7のいずれか1項に記載のロボット制御装置。
- 前記力検出装置は、演算を行う演算部を有する請求項1ないし8のいずれか1項に記載のロボット制御装置。
- 力検出装置が設けられたロボットと、
前記ロボットを制御する請求項1ないし9のいずれか1項に記載のロボット制御装置と、を備えることを特徴とするロボットシステム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017127388A JP2019010683A (ja) | 2017-06-29 | 2017-06-29 | ロボット制御装置およびロボットシステム |
| CN201810674576.4A CN109202960A (zh) | 2017-06-29 | 2018-06-26 | 机器人控制装置和机器人系统 |
| US16/021,238 US20190001502A1 (en) | 2017-06-29 | 2018-06-28 | Robot control device and robot system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017127388A JP2019010683A (ja) | 2017-06-29 | 2017-06-29 | ロボット制御装置およびロボットシステム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019010683A true JP2019010683A (ja) | 2019-01-24 |
| JP2019010683A5 JP2019010683A5 (ja) | 2020-07-09 |
Family
ID=64734564
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017127388A Pending JP2019010683A (ja) | 2017-06-29 | 2017-06-29 | ロボット制御装置およびロボットシステム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20190001502A1 (ja) |
| JP (1) | JP2019010683A (ja) |
| CN (1) | CN109202960A (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112018669A (zh) * | 2019-05-28 | 2020-12-01 | 国网江苏省电力有限公司徐州供电分公司 | 一种适合带电作业机器人操作的电缆压接工具 |
| CN112008747B (zh) * | 2019-05-28 | 2022-02-15 | 国网江苏省电力有限公司徐州供电分公司 | 一种适合带电作业机器人操作的电缆剪切工具 |
| CN111890415A (zh) * | 2020-07-23 | 2020-11-06 | 唐山学院 | 一种机器人控制装置防护结构 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5983286A (en) * | 1997-11-06 | 1999-11-09 | Hewlett-Packard Company | Method and apparatus for setting a device parameter |
| JP2002297275A (ja) * | 2001-03-30 | 2002-10-11 | Internatl Business Mach Corp <Ibm> | データ転送装置、コンピュータ装置、デバイス、ドッキングステーション |
| JP2009049180A (ja) * | 2007-08-20 | 2009-03-05 | Funai Electric Co Ltd | ケーブル位置規制構造および液晶テレビジョン |
| WO2013175777A1 (ja) * | 2012-05-23 | 2013-11-28 | パナソニック株式会社 | ロボット、ロボットの制御装置、制御方法、及び制御プログラム |
| JP2016095629A (ja) * | 2014-11-13 | 2016-05-26 | ルネサスエレクトロニクス株式会社 | シリアル通信システム、通信制御装置および電子装置 |
| JP2016122311A (ja) * | 2014-12-25 | 2016-07-07 | Necプラットフォームズ株式会社 | 基板の抜去構造 |
| JP2017007036A (ja) * | 2015-06-23 | 2017-01-12 | キヤノン株式会社 | ロボットシステムの制御方法、およびロボットシステム |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102837314A (zh) * | 2011-06-24 | 2012-12-26 | 镇江华扬信息科技有限公司 | 一种开放式机器人控制器力位混合控制的方法 |
| CN103466338B (zh) * | 2013-09-11 | 2015-12-23 | 南京理工大学 | 自动码垛图书装置 |
| CN105313127A (zh) * | 2014-06-02 | 2016-02-10 | 精工爱普生株式会社 | 机器人、机器人的控制方法以及机器人的控制装置 |
| JP6858750B2 (ja) * | 2016-03-28 | 2021-04-14 | ソニー・オリンパスメディカルソリューションズ株式会社 | 医療用観察装置、駆動制御方法、医療用観察システム及び支持アーム装置 |
-
2017
- 2017-06-29 JP JP2017127388A patent/JP2019010683A/ja active Pending
-
2018
- 2018-06-26 CN CN201810674576.4A patent/CN109202960A/zh active Pending
- 2018-06-28 US US16/021,238 patent/US20190001502A1/en not_active Abandoned
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5983286A (en) * | 1997-11-06 | 1999-11-09 | Hewlett-Packard Company | Method and apparatus for setting a device parameter |
| JP2002297275A (ja) * | 2001-03-30 | 2002-10-11 | Internatl Business Mach Corp <Ibm> | データ転送装置、コンピュータ装置、デバイス、ドッキングステーション |
| JP2009049180A (ja) * | 2007-08-20 | 2009-03-05 | Funai Electric Co Ltd | ケーブル位置規制構造および液晶テレビジョン |
| WO2013175777A1 (ja) * | 2012-05-23 | 2013-11-28 | パナソニック株式会社 | ロボット、ロボットの制御装置、制御方法、及び制御プログラム |
| JP2016095629A (ja) * | 2014-11-13 | 2016-05-26 | ルネサスエレクトロニクス株式会社 | シリアル通信システム、通信制御装置および電子装置 |
| JP2016122311A (ja) * | 2014-12-25 | 2016-07-07 | Necプラットフォームズ株式会社 | 基板の抜去構造 |
| JP2017007036A (ja) * | 2015-06-23 | 2017-01-12 | キヤノン株式会社 | ロボットシステムの制御方法、およびロボットシステム |
Also Published As
| Publication number | Publication date |
|---|---|
| US20190001502A1 (en) | 2019-01-03 |
| CN109202960A (zh) | 2019-01-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9409293B2 (en) | Robot | |
| JP6788593B2 (ja) | マニピュレータシステム | |
| CN106863266B (zh) | 机器人、控制装置以及机器人系统 | |
| JP6332900B2 (ja) | ロボットシステム及びロボット制御装置 | |
| CN104608125B (zh) | 机器人、控制装置以及机器人系统 | |
| EP3461599B1 (en) | Robot | |
| US20180029221A1 (en) | Robot and robot system | |
| JP6958200B2 (ja) | ロボット | |
| US10195744B2 (en) | Control device, robot, and robot system | |
| JP2019010683A (ja) | ロボット制御装置およびロボットシステム | |
| JP7339806B2 (ja) | 制御システム、ロボットシステム及び制御方法 | |
| US11077549B2 (en) | Robot and robot system | |
| JP2019063940A (ja) | ロボット | |
| CN109955279B (zh) | 机器人手、其控制方法、物品的组装方法及存储介质 | |
| JP6361207B2 (ja) | ロボット、ロボットシステムおよびロボット制御装置 | |
| JPWO2017175340A1 (ja) | 最適化装置及びそれを備えた垂直型多関節ロボット | |
| JP2017104939A (ja) | 制御装置、ロボットおよびロボットシステム | |
| CN111745622B (zh) | 机器人 | |
| US11498218B2 (en) | Robot | |
| US7020542B2 (en) | Apparatus for measuring and fixing the three-dimensional location of medical instrument | |
| JP2015160292A (ja) | ロボット制御装置、ロボットおよびロボット制御方法 | |
| JP2003181782A (ja) | 産業用ロボット | |
| CN111113373B (zh) | 控制装置、机器人系统及控制方法 | |
| US11628563B2 (en) | Control method and robot system | |
| JP7392326B2 (ja) | ロボット |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200527 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200527 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20210331 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210406 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210524 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20210831 |