JP2018166350A - 誘導電動機の駆動装置 - Google Patents
誘導電動機の駆動装置 Download PDFInfo
- Publication number
- JP2018166350A JP2018166350A JP2017062050A JP2017062050A JP2018166350A JP 2018166350 A JP2018166350 A JP 2018166350A JP 2017062050 A JP2017062050 A JP 2017062050A JP 2017062050 A JP2017062050 A JP 2017062050A JP 2018166350 A JP2018166350 A JP 2018166350A
- Authority
- JP
- Japan
- Prior art keywords
- induction motor
- initial speed
- speed estimation
- value
- speed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images




Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/14—Estimation or adaptation of machine parameters, e.g. flux, current or voltage
- H02P21/18—Estimation of position or speed
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/34—Arrangements for starting
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Control Of Ac Motors In General (AREA)
Abstract
【課題】本発明の目的は、誘導電動機のセンサレスベクトル制御における初期速度推定方式を改善し、推定に必要とする時間を短縮し、かつ、起動におけるトルクショックを大幅に低減することに関する。【解決手段】本発明は、誘導電動機の初期速度を推定する際、誘導電動機への通電開始と同時に、通電する交流周波数を流れた電流値に応じて修正し、当該電流値に応じて交流周波数の変化率を調整することに関する。本発明によれば、センサレスベクトル制御で駆動される誘導電動機の停止や、フリーラン状態からの再起動において、高速かつ、低トルクショックに初期速度を推定できる。【選択図】図1
Description
本発明は誘導電動機の駆動装置または鉄道車両にかかり、特に、鉄道車両の停車時や惰行時からの再起動時における車体振動を低減可能な制御装置を備えた誘導電動機の駆動装置に関する。
産業機器類の多くはモータによって駆動しており、モータが占める国内の電力消費量割合は約50%にも上り、この電力消費量低減のため、高効率なモータの開発が進められてきた。また、インバータ等の電力変換装置を用いたモータの可変速駆動によっても大きな省エネ効果を得ることができることから、電力変換装置の普及が進んでいる。
電力変換装置内にはモータ制御ソフトが搭載され、制御手法として高精度にモータを制御可能なベクトル制御が主流となっている。このベクトル制御では、モータの速度情報を必要とするが、近年、省保守化や信頼性向上、モータ容量を増加による出力向上を目的として、速度センサによる検出に替えて推定速度を用いることにより速度センサを不要とした速度センサレスベクトル制御が開発された。
本願発明者が、誘導電動機のセンサレスベクトル制御における初期速度推定に必要とする時間を短縮し、かつ、起動におけるトルクショックを大幅に低減することについて鋭意検討した結果、次の知見を得るに至った。
速度センサレスベクトル制御では、制御ソフト内に速度推定のアルゴリズムを持たせ、モータの回転速度を推定している。仮に、この推定速度が、実際の速度に対して誤差を持ってしまうと、ベクトル制御が認識する制御軸(dq軸)が、実際のモータのdq軸とずれた状態となり、トルク偏差やトルクショックを引き起こしてしまう。
電力変換装置によって駆動していないモータの停止時や、フリーラン状態から再起動する際には、通電開始と同時に速度を推定する初期速度推定が行われる。ここでは、初期速度の推定を失敗せずに確実に推定することに加え、モータが接続される負荷側にトルクショックを与えないことが求められており、初期速度の推定にかかる時間を短縮し、トルクショックを低減することが課題となる。
初期速度推定方式については、永久磁石同期電動機や誘導電動機といったモータの種類によって回転力を得る原理が異なるため、モータ毎に異なる課題を持つ。
永久磁石同期電動機のように、常時、磁石磁束を有するモータであれば、電力変換装置のゲートONと同時に、磁石磁束が固定子コイルに鎖交することにより誘起電圧が発生し、固定子コイルに電流が流れる。この誘起電圧が過度に生じることを抑制するために様々な技術が検討されているが、通電開始直後から誘起電圧を利用できるため、初期速度推定は比較的短時間で行うことができる。
一方、誘導電動機においては、界磁源が二次側に流れる誘導電流であるため、通電開始直後は磁束が確立されていない状態から速度を推定する必要があり、永久磁石同期電動機よりも初期速度推定に時間を要する課題がある。初期速度推定に時間が掛かると、制御軸が誤差を持っている時間も長くなるため、軸誤差がない状態ではゼロとなるq軸側二次磁束が発生し、q軸側二次磁束とd軸電流の積に比例したトルクショックの発生に繋がってしまう。
特開2013−106461号公報(特許文献1)には、速度センサレスベクトル制御のフリーラン状態の電動機の回転速度を精度良く同定するために、電動機制御部が、速度サーチを実施する際に周波数掃引を行う周波数掃引手段を有し、周波数掃引中に検出q軸電流Iqの極性が反転した場合、検出d軸電流Idの値が所定の判定閾値以下であれば、電動機の回転速度(実速度)と指令回転速度(掃引周波数)とが一致したと判断する機能を備えることが開示されている。また、特許文献1の〔0041〕から〔0043〕には、周波数掃引のレートを高くし過ぎると不安定化するため、ティーチング機能で最適レートに設定することが開示されている。
しかし、特許文献1では、初期速度推定の成否は、制御応答のみならず、モータの時定数にも大きく影響を受けるため、特定の条件で最適レートを決めてティーチングしたとしても、ダイナミックに変化するモータの温度条件、磁束密度条件が変化した場合、時定数も変化するため、不安定化する可能性が考えられる。
国際公開第2010/125637号(特許文献2)には、フリーラン状態の交流回転機の再起動時におけるトルクショックの更なる低減を目的に、フリーラン速度を演算する第1の演算部と、第1の演算部で算出した速度、または磁束の少なくとも1つを初期値として、電圧指令と駆動速度を演算出力する第2の演算部を備えることが開示されている。この第1の演算部においては、電圧方程式をもとにしたオブザーバ方式が適用されている。また、特許文献2の〔図2〕では、推定初期値が0Hzとなっているため、低速域(0Hz付近)の推定は高速かつ低トルクショックに推定が可能である。
しかし、特許文献2では、実際の初期速度が高くなる程、磁束の立ち上がりが遅れ、初期速度推定の所要時間が長くなり、トルクショックが発生することが予想される。
本発明の目的は、誘導電動機のセンサレスベクトル制御における初期速度推定方式を改善し、推定に必要とする時間を短縮し、かつ、起動におけるトルクショックを大幅に低減することに関する。
本発明は、誘導電動機の初期速度を推定する際、誘導電動機への通電開始と同時に、通電する交流周波数を流れた電流値に応じて修正し、当該電流値に応じて交流周波数の変化率を調整することに関する。
本発明によれば、センサレスベクトル制御で駆動される誘導電動機の停止や、フリーラン状態からの再起動において、高速かつ、低トルクショックに初期速度を推定できる。
例えば、本発明によれば、特許文献1と異なり、駆動周波数の変化率を、通電電流の値に応じて変化させるため、推定速度が実速度と大きく乖離している条件では速度推定を高速化し、推定速度が実速度に近付いた条件になると、速度推定ゲインは小さくすることができ、自然に安定化する。強制的に一定レートで周波数掃引しているわけではなく、モータの状態変化が含まれた検出情報(電流検出値)に基づき、速度推定応答を可変にする制御系にしているため、モータの温度条件や磁束密度条件が変化した場合においても、初期速度の推定を失敗することなく安定した初期速度推定を実現できる。
また、本発明によれば、特許文献2と異なり、速度推定値と実際の速度の差に応じて、誘導電動機の電流検出値が大きくなる性質を利用し、駆動周波数の変化率を通電電流の値に応じて変化させ、速度推定応答を可変にして高速化しているため、初期速度推定値と実際の速度が大きく離れている場合でも高速に初期速度を推定し、低トルクショック化を実現できる。
実施例では、誘導電動機をセンサレスベクトル制御で駆動する誘導電動機の駆動装置であって、外部からの指令に基づき誘導電動機を制御する制御装置が、誘導電動機への通電開始時の駆動周波数を、誘導電動機の電流検出手段によって検出した電流値により修正して初期速度を推定し、更に、当該修正時における駆動周波数の変化率を、検出された電流値に応じて変化させる初期速度推定部を有するものを開示する。
また、実施例では、誘導電動機のセンサレスベクトル制御における初期速度推定方法であって、誘導電動機の制御装置が、誘導電動機への通電開始時の駆動周波数を、誘導電動機に流れる電流値により修正し、更に、修正時における駆動周波数の変化率を、電流値に応じて変化させるものを開示する。
また、実施例では、q軸電流指令値とq軸電流検出値の偏差をゼロとなるように制御することを開示する。
また、実施例では、初期速度の推定時における通電開始時のd軸電流検出値が、d軸電流指令値に対して大きくなるに従って、駆動周波数の変化率を、通電開始時よりも高くすることを開示する。
また、実施例では、推定した初期速度が、所定の閾値以下になった際に、第1のd軸電流指令値にd軸電流補償量を加算することにより、第2のd軸電流指令値を演算することを開示する。
また、実施例では、初期速度推定部の制御ゲインが、d軸二次磁束指令値を含み、当該d軸二次磁束指令値として、d軸電流指令の波形または印加時間に応じて過渡的に変化するd軸二次磁束の演算指令値が用いられることを開示する。また、誘導電動機の制御装置が、制御ゲインとして、d軸二次磁束指令値を含み、当該d軸二次磁束指令値として、d軸電流指令の波形または印加時間に応じて過渡的に変化するd軸二次磁束の演算指令値を用いることを開示する。
また、実施例では、推定初期値が、制御装置の外部から入力される速度情報に基づいて設定されることを開示する。
また、実施例では、誘導電動機を駆動する電力変換器が、SiCインバータであることを開示する。また、誘導電動機の制御装置が、SiCインバータを制御することを開示する。
また、実施例では、誘導電動機の駆動装置を搭載した電気車を開示する。また、初期速度推定方法を用いることにより電気車の誘導電動機を駆動する方法を開示する。
以下、上記およびその他の本発明の新規な特徴と効果について図面参酌して説明する。なお、実施例および図面は専ら発明の理解のために用いるものであり、権利範囲を限縮するものではない。
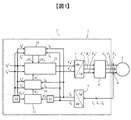
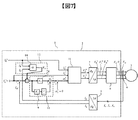
図1は、本実施例にかかる誘導電動機の駆動装置の機能ブロック図であり、本実施例による誘導電動機をセンサレスベクトル制御で駆動する誘導電動機の駆動装置の構成を機能ブロックにより示したものである。
図1に示す誘導電動機の駆動装置1には、誘導電動機3が接続されている。誘導電動機の駆動装置1には、制御装置2と電力変換器(主回路)が組み込まれている。電力変換器は、IGBT(Insulated Gate Bipora Transistor)等のトランジスタや、ダイオードから成るパワーデバイスから構成されており、直流電圧または交流電圧を任意の交流電圧に変換し、電力変換器に接続されている誘導電動機を駆動する。制御装置2には、誘導電動機3を速度センサレスでベクトル制御するための制御プログラムが実装されている。なお、図1において、電力変換器は図示を省略している。
誘導電動機3は、固定子巻線に3相交流電圧を印加して発生した回転磁界が、回転子にすべりが生じたときに回転子導体に流れる誘導電流との相互作用により回転トルクを発生させる。
電圧指令演算部11には、励磁軸(磁束軸)であるd軸のd軸電圧指令Vd*と、d軸と電気的に直行する方向のq軸電圧指令Vq*を出力している。d軸電圧指令Vd*、q軸電圧指令Vq*から、座標変換器7が3相電圧指令Vu*、Vv*、Vw*を生成し、PWM演算部6(Pulse Width Moduration)がPWM制御することにより、誘導電動機の駆動装置1から誘導電動機3に3相電圧Vu、Vv、Vwが出力される。座標変換器5および座標変換器7において、座標変換する際には周波数ω1を積分した位相θが必要となるが、図1では図示を省略している。実際には、ωは角周波数であるが、本実施例では簡略化して速度や周波数として用いる。
誘導電動機3に流れる電流は、電流検出器4によって検出している。電流検出器4は、ホールCT(Current Transformer)等から成り、U相、V相、W相の3相の電流Iu、Iv、Iwを検出している。ただし、電流検出器4によって必ずしも3相全ての電流を検出する必要はなく、いずれかの2相を検出し、3相電流が平衡状態であると仮定して他の1相を演算により求める構成でも良い。
検出電流は、座標変換器5によって、3相からベクトル制御のdq座標に変換され、Id、Iqとして誘導電動機の駆動装置1に取り込まれる。
電流制御器15では、電流検出値が、d軸電流指令値Id*、q軸電流指令値Iq*に対して偏差量をゼロとするようにフィードバック制御する。
初期速度推定演算部10では、電流検出値が取り込まれ、誘導電動機3の等価回路定数などの情報を基にした速度推定モデルによって速度推定値ωr^を演算する。この速度推定モデルは、q軸電流偏差量をゼロに制御する方式や、モデルベースによるオブザーバ方式等でもよく、必ずしもここに記載された方式に限定されるわけではない。
また、各フィードバック制御系における制御方式においては、PI制御(比例・積分型制御)や、PII制御(比例・二重積分型制御)等が適宜用いられるものとする。
速度推定変化率演算部12について説明する。本実施例では、誘導電動機3が、誘導電動機3に印加する駆動電圧の周波数と、ロータ周波数の差分である「すべり周波数」に応じて、誘導電動機3のインピーダンスが変化する性質を利用し、初期速度推定を高速化している。これは、二次側に誘導電流を流して回転力を得る誘導電動機3の性質に着目したものであるため、二次側に導体を配置するリニアインダクタションモータ等に好適である。
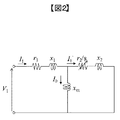
図2は、本実施例にかかる誘導電動機のT型等価回路図であり、誘導電動機3のT型等価回路を示す。相電圧ベクトルV1と相電流ベクトルI1を式(1)、(2)のように定義すると、合成インピーダンスZは式(6)で表わされる。

ここで、r1は一次抵抗、r2は二次抵抗、x1は一次漏れリアクタンス、x2は二次漏れリアクタンス、sはすべり、Z1は一次側インピーダンス、Z2は二次側インピーダンス、Y0は励磁アドミタンス、Xmは励磁リアクタンスとする。誘導電動機3の電流ベクトルI1は式(7)となる。
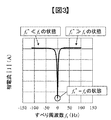
図3は、誘導電動機におけるすべり周波数と相電流の関係を示す図であり、式(7)によるすべり周波数fs(=速度推定誤差)と、相電流ベクトルI1の絶対値|I1|の関係を示す。速度推定値と実際の速度が一致する条件では、すべり周波数がゼロとなって、二次側インピーダンスZ2が無限大となるため、相電流は最小となる。
逆に、すべりが正もしくは負に過大の条件では、二次側インピーダンスZ2が小さくなり、すべりがゼロの条件と比べて電流は大きくなる。言い換えれば、推定速度が実際の速度と一致している条件で電流が最小となり、推定速度が実際の速度と大きく乖離している条件では相電流の検出値|I|は大きくなる。
図1に示す本実施例では、相電流指令値|I*|と相電流検出値|I|を速度推定変化率演算部12に入力し、相電流指令値|I*|に対して相電流検出値|I|が大きくなるに従って、可変ゲインKxを大きくする演算を行う。速度推定変化率演算部12により演算された可変ゲインKxは、初期速度推定演算部10の制御ゲインに積算され、初期速度推定演算部10の速度推定応答を速度推定偏差量が大きい場合に高速化する役割を果たす。
すなわち、初期速度推定演算部10による速度推定値ωr^が実際の速度ωrに対して大きく乖離している場合には、可変ゲインKxが大きくなり、速度推定を高応答化することにより、推定速度ωr^を実速度ωrに高速に収束させることができる。
速度推定ゲインをハイゲイン化することにより、速度推定系が不安定になることが考えられるが、図3に示したように、速度推定値ωr^と実際の速度ωrが近づいた場合には、相電流指令|I*|と相電流検出値|I|の差も図3に示すように小さくなるため、可変ゲインKxは自然に小さくなり速度推定系は安定化する。
図4は、本実施例による初期速度推定期間の速度推定結果の比較図であり、本実施例適用の有無を比較した計算結果の一例を示す。図4は、ロータ周波数fr=30Hzのフリーラン状態において、初期速度推定の開始と同時に、所定の電流指令を与え、誘導電動機3に流れる電流検出値の情報をもとに、推定初期値を200Hzとして初期速度を推定した結果である。
図4(a)は、本実施例適用時の初期速度推定結果を示しており、初期速度推定の開始後に電流検出値が増加し、速度推定変化率演算部12の出力である可変ゲインKxが増加していることがわかる。可変ゲインKxは、速度推定ゲインに積算されるため、速度推定値fr^の変化率はKxに応じて変化している。これによって、速度推定値fr^は実際の速度frに向かって高速に収束させることができる。
図4(b)は、従来技術(特許文献1)によって初期速度推定した結果を示している。特許文献1の〔0015〕に記載の通り、速度サーチを実施する際の周波数掃引は最高周波数から一定レートで変化させており、電流検出値によらず、駆動周波数は一定の変化率(Kx=1)となる。この場合、速度推定値fr^は実際の速度frに対して収束方向に向かってはいるものの、推定初期値(200Hz)と実際の速度(30Hz)といったように初期速度推定開始時点での速度推定偏差が大きい条件では、膨大な時間を要する。
図5は、本実施例による初期速度推定期間のトルクショック低減効果の比較図であり、初期速度推定時における本実施例と従来技術(特許文献1)でのトルクショックの比較を示す。従来技術(特許文献1)におけるトルクショックを100%とした際の割合で比較している。本実施例によれば、初期速度推定を高速化できるため、従来技術と比較してトルクショックを96%低減することが可能である。
仮に、推定速度が実際の速度と一致していない状態では、大電流が流れることによりq軸二次磁束Φ2qが生じ、トルクショックにつながる。本実施例では、図4で比較したように、大電流が流れる前に、速度推定値ωr^を実速度ωrに高速に収束させるため、このq軸二次磁束Φ2qの発生を抑制し、トルクショックを大幅に低減できる。
更に、近年の誘導電動機3は電力消費量低減の要求に応え、従来よりも更に回転子の二次抵抗r2を小さく(低すべり化)することにより、高効率化している。低すべりになる程、電気的、磁気的な時定数は長くなり、応答が鈍くなるため、初期速度の推定に時間を要するようになる。本実施例では、速度推定変化率演算部12によって、速度推定を高速化できるため、定格すべりが1%以下となる高効率な誘導電動機3に対しても、短時間かつ低トルクショックに初期速度を推定できる。
以上のように、本実施例によると、誘導電動機3のすべり周波数に応じたインピーダンス変化を利用し、電流検出値をもとに速度推定応答を可変にすることにより、初期速度推定の高速化・低トルクショック化を実現する誘導電動機の駆動装置を提供できる。
本実施例では、実施例1と異なり、速度推定系と電流制御系を一体化するものである。以下、実施例1との相違点を中心に説明する。
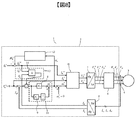
図6は、本実施例にかかる誘導電動機の駆動装置の機能ブロック図であり、誘導電動機をセンサレスベクトル制御で駆動する誘導電動機の駆動装置の構成を機能ブロックにより示したものである。
本実施例では、モータ定数の変動に対するロバスト性を高めることを目的に、初期速度推定演算部10がq軸電流偏差量をもとに速度推定演算を行い、d軸電流指令Id*がフィードフォワードで電圧指令演算部11に入力される点で実施例1と異なる。
初期速度推定演算部10では、q軸電流偏差量に、比例ゲインKP8、積分ゲインKI9を積算して、両者を加算することにより速度推定値ωr^を演算する。初期速度推定演算部10により算出した速度推定値ωr^にすべり周波数指令値ωs*を加算することにより、一次周波数指令ω1*が算出される。ただし、本実施例においては、トルク電流であるq軸電流指令Iq*をゼロに制御するため、すべり周波数指令ωs*もゼロであり、速度推定値ωr^は一次周波数指令値ω1*と同一値となる。
以下、本実施例における比例ゲインKP8と積分ゲインKI9の導出について示す。誘導電動機の電圧方程式は式(8)で表わされる。
ただし、r1は一次抵抗、r2’は一次換算された二次抵抗、Lσは一次換算された漏れインダクタンス、Mは相互インダクタンス、L2は二次自己インダクタンス、T2は二次時定数、Φ2dはd軸二次磁束、Φ2qはq軸二次磁束、sはラプラス演算子である。ここで、一次自己インダクタンスL1、二次自己インダクタンスL2、一次換算漏れインダクタンスLσ、二次時定数T2、一次換算した二次抵抗r2’は以下の通りとする。
式(8)における第2行目のVqに関する式を展開すると、誘導電動機3と誘導電動機の駆動装置1におけるq軸電流Iq、Iq*はそれぞれ次式で表わされる。
ここで、誘導電動機3の定数と、制御装置2の定数が一致しているとし、Id、Φ2d、Φ2qは指令値と一致していると仮定すると、次式となる。
すなわち、q軸電流の偏差からロータ周波数の偏差を表わす伝達関数は次式となる。
よって、q軸電流の偏差量から、誘導電動機3の速度を1次遅れ系で推定する制御式は次式となる。ただし、ωacrは電流制御の応答周波数とする。
以上より、図6における比例ゲインKP8、積分ゲインKI9は次式となる。
そして、本実施例の最終的な速度推定式について、速度推定変化率演算部12の出力Kxが積算され、次式となる。
以上のように、本実施例では、図1に示したように電流制御器15と初期速度推定演算部10を別々に設けず、q軸電流偏差量をゼロにするように速度推定値ωr^を制御する構成とすることにより、速度推定系と電流制御系を一体化した構成としている。
また、定数変動に対するロバスト性に関しても、本実施例では、誘導電動機3の温度上昇等によって定数変動が生じた場合、初期速度推定時間は変わってしまうものの、q軸電流偏差をゼロ(すべり周波数をゼロ)にするようにフィードバック制御しているため、速度推定精度については高精度に初期速度を推定できる。
他の方式について例を挙げると、誘導電動機3の電圧方程式に基づくオブザーバ方式では、定数変動の影響を受け易いことが考えられる。例えば、特許文献2の第1の演算部では、初期速度を(Vq*−R1・Iq)/Φ1の数式から演算している。特に低速域においては、Vq*が小さくなるので、モータの温度変動でR1の定数誤差が生じた際、R1の誤差が与える影響が相対的に大きくなるため、速度推定偏差によってトルクショックの発生に繋がってしまうことが考えられる。
本実施例では、q軸電流偏差をゼロに制御するように速度を推定する構成にして、速度推定系と電流制御系を一体化することにより、速度推定応答を電流制御応答と同一にでき、速度推定が高速なことに加え、定数変動が生じた場合でも、Iq偏差量がゼロになるようにフィードバック制御する構成であるため、定数変動に対するロバスト性も高い特徴を持つ。
前述した定数変動時の初期速度推定時間の変動については、誘導電動機3の抵抗値が最小となる条件(モータ温度範囲の下限値)においても、初期速度推定を完了できるように予めマージンを持たせ制御装置2を設計する。
本実施例では、実施例1よりも、初期速度推定の更なる高速化・低トルクショック化を実現し、定数変動に対するロバスト性を更に高めた誘導電動機の駆動装置を提供できる。
本実施例は、実施例1乃至2よりも速度推定変化率の演算を簡素化したものである。以下、実施例1乃至2との相違点を中心に説明する。
図7は、本実施例にかかる誘導電動機の駆動装置の機能ブロック図であり、誘導電動機をセンサレスベクトル制御で駆動する誘導電動機の駆動装置の構成を機能ブロックにより示したものである。
本実施例では、速度推定変化率演算部12の演算を簡素化し、制御装置2における演算負荷を低減することを目的に、速度推定変化率演算部12において、d軸電流指令値Id*とd軸電流検出値Idを入力して可変ゲインKxを演算している。
q軸は電流偏差をゼロにするように制御し、d軸はフィードフォワード制御にする構成にしているため、Iq=Iq*と仮定すると、速度推定偏差はd軸電流に現れることになる。すなわち、|I|≒Idと見なせるため、d軸電流偏差量のみから速度推定偏差量の大小を判別でき、速度推定変化率演算部12の入力をId*、Idとできる。
実施例2では、電流検出値Id、Iqの絶対値を演算する処理を行っていたが、本実施例ではこの演算処理が不要になり、演算処理を簡素化し、制御装置2の演算の負荷率を低減できる。
速度推定変化率演算部12における演算処理G14は、Id/Id*のように単純な比でも良いが、事前にd軸電流偏差量に対する可変ゲインテーブルを準備し、d軸偏差量を入力とする可変ゲインの演算方法としても良い。実施例1のように、誘導電動機3がすべり周波数に応じて電流変化する性質を利用し、速度推定応答を可変にすれば良い。
本実施例では、実施例2よりも、速度推定変化率演算部12の演算を簡素化でき、演算負荷を更に低減した誘導電動機の駆動装置を提供できる。
本実施例は、低速域でd軸電流指令Id*を増加させるものである。以下、実施例1乃至3との相違点を中心に説明する。
図8は、本実施例にかかる誘導電動機の駆動装置の機能ブロック図であり、誘導電動機をセンサレスベクトル制御で駆動する誘導電動機の駆動装置の構成を機能ブロックにより示したものである。
本実施例では、低速域における初期速度推定の失敗の防止を目的に、速度推定値ωr^が所定の判定閾値以下となった際に、d軸電流指令Id*にΔId*を加算するd軸ブースト制御演算部13を備える。
式(16)に示した通り、実施例2等の初期速度推定方式は、速度起電力とq軸電流偏差量の関係を線形化したものである。式(16)から明らかであるように、式(16)右辺の速度起電力がゼロになってしまうと、本速度推定方式は成立しなくなる。式(16)右辺は、誘導電動機3のロータの速度ωrとd軸二次磁束Φ2dの積に比例しているため、速度が低下する程、小さくなる。つまり、低速域において、速度推定が破綻しないようにするために、d軸二次磁束指令Φ2d*を増加させ、誘導電動機3におけるd軸二次磁束Φ2dを増やすことにより、低速域においても速度起電力の低下を抑えることができる。
本実施例のd軸ブースト制御演算部13は、速度推定値ωr^をもとに低速域と判断した場合には、適切な大きさのd軸電流指令補償量ΔId*を出力し、第1の電流指令Id*にΔId*を加算して、第2の電流指令Id**を演算する。
これによって、低速域と判断した場合のみ、速度起電力を増加させ、速度推定失敗を防止できる。なお、d軸電流指令補償量ΔId*は、誘導電動機3の回路定数や、制御装置2の仕様に応じて適切に設計する。
また、本実施例では推定の初期値を200Hz(駆動周波数の上限値)に設定しているが、この値に限定されるものではない。必ずしも上限値とする必要はないが、駆動速度範囲の中央値よりも高い値に設定することが望ましい。仮に、推定初期値を低速域に設定して高速域の推定を行う場合、推定開始直後にd軸ブースト制御演算部13が動作し、不要なトルクショックを発生させる可能性がある。
本実施例の制御構成では、速度起電力が大きく、初期速度推定が容易な高速域を最初にサーチし、その後、低速域と判断した場合のみd軸ブースト制御演算部13を動作させ、d軸二次磁束Φ2dを増加させる。本制御構成では、速度起電力が過小になることを防止するために、必要な速度域で必要な大きさの電流指令を与える方式としている。これによって、全速度域に対して、推定失敗することなく、低トルクショックに推定ができる。
図9は、本実施例による初期速度推定結果を示す図であり、d軸ブースト制御演算部の有無での、速度推定結果の比較を示す。図9では、初期速度の推定が特に難しいロータ周波数fr=−10Hz(逆回転時)における初期速度推定結果を比較している。本比較においては、一例として、速度推定値fr^が3Hz以下となった時点で、d軸ブースト制御演算部13を動作させている。この速度推定値の判定値は、誘導電動機3の諸元に合わせ、適切に設定されるものとする。図9(a)では、推定周波数fr^が3Hz以下になった時点で、d軸ブースト制御が動作し、第2のd軸電流指令Id**がステップ状に大きくなり、d軸二次磁束Φ2dが立ち上がり、所定の速度起電力を確保することで、速度推定値fr^が実際の速度frに収束する。一方、図9(b)では、推定周波数fr^が実際の周波数fr(−10Hz)へ向かうものの、d軸二次磁束Φ2dが立ち上がらず、fr^がゼロに収束し(速度起電力がゼロに収束)、初期速度推定を失敗する結果となる。この速度起電力がゼロになる現象は、誘導電動機3の原理上、低速域になる程、q軸二次磁束Φ2qが発生し易く、d軸に影響を及ぼし易くなることに起因する。本実施例では、d軸二次磁束Φ2dを増加させて、q軸二次磁束Φ2qの干渉によってd軸二次磁束Φ2dがゼロになることを防ぐことにより解決している。d軸電流指令補償量ΔId*はステップ状に加算しているが、d軸電流を増加させるものであれば、どのような形状でも良い。
また、高効率な誘導電動機3は、低すべりであることから、二次時定数T2(二次磁束の時定数)が長く、d軸二次磁束の確立が難しく、初期速度の推定失敗が発生し易い傾向にある。このような、低すべりな誘導電動機3に対しても、本実施例を適用することにより、速度推定失敗を発生することなく、初期速度を推定できる。
以上より、本実施例では、低速域でd軸電流指令Id*を増加させるd軸ブースト制御を備えることにより、実施例3よりも、低速域における初期速度推定の精度を更に高めた誘導電動機の駆動装置を提供できる。
本実施例は、d軸二次磁束指令Φ2d*に過渡値を用いるものである。以下、実施例1乃至4との相違点を中心に説明する。
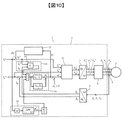
図10は、本実施例にかかる誘導電動機の駆動装置の機能ブロック図であり、誘導電動機をセンサレスベクトル制御で駆動する誘導電動機の駆動装置の構成を機能ブロックにより示したものである。
本実施例では、初期速度推定の更なる時間短縮および低トルクショック化を目的に、初期速度推定演算部10に用いるd軸二次磁束指令Φ2d*に、定常値ではなく、過渡値を用いる。
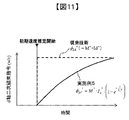
図11は、本実施例にかかるd軸二次磁束指令演算を示す概略説明図であり、本実施例と従来技術におけるd軸二次磁束指令Φ2d*の比較したものである。従来技術では、d軸電流指令Id*に基づき、初期速度推定の開始と同時に定常値のd軸二次磁束指令Φ2d*を出力する。一方、本実施例では、d軸電流指令Id*に基づき、二次時定数T2のLPF(Low Pass Filter)を通過させることにより、d軸二次指令Φ2d*は、次式で示すように、初期速度推定開始からの経過時間tに応じた過渡的な値を出力する。ただし、式(23)はd軸電流指令Id*をステップ入力した際の、d軸二次磁束Φ2dの過渡値を示す式であるが、d軸電流指令Id*はステップ形状、フィルタを通した一次遅れ形状、通電開始直後に急激に流して徐々に減衰させるフォーシング形状でも良く、限定されるものではない。
初期速度推定の開始直後は、速度推定値が一致しておらず、制御軸が一致していない状態であるため、図9に示したように、誘導電動機3に実際に発生しているd軸二次磁束Φ2dは、ほぼゼロに近い値である。即ち、初期速度推定演算部10における制御ゲインのd軸二次磁束指令Φ2d*に定常値を考慮した場合、式(22)に示すように速度推定系のゲインが不足することとなる。本実施例では、速度推定系ゲインのd軸二次磁束指令Φ2d*に、d軸電流指令Id*の波形や印加時間に応じて過渡的に変化するd軸二次磁束指令の演算指令値を用いることにより、誘導電動機3の実際のΦ2dにより近い値とすることができ、推定モデルを高精度化し、このゲイン不足を解消できる。
また、低すべりな誘導電動機においては、二次時定数T2も長くなり、d軸二次磁束指令Φ2d*の立ち上がりも緩やかになるが、本実施例では、誘導電動機3が低すべりになる程、初期速度推定系のゲインを高める方向に作用する。
本実施例では、初期速度推定演算部10に用いるd軸二次磁束指令Φ2d*に、d軸電流指令Id*の波形や印加時間に応じて過渡的に変化する演算指令値を用いることにより、実施例4よりも更に高速に初期速度を推定でき、トルクショックを低減できる。
本実施例は、駆動システムの速度情報を初期値に用いるものである。以下、実施例1乃至5との相違点を中心に説明する。
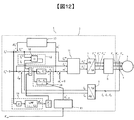
図12は、本実施例にかかる誘導電動機の駆動装置の機能ブロック図であり、誘導電動機をセンサレスベクトル制御で駆動する誘導電動機の駆動装置の構成を機能ブロックにより示したものである。
本実施例では、初期速度推定の更なる時間短縮および低トルクショック化を目的に、鉄道車両等の駆動システムの速度情報を制御装置2に取り込み、初期速度推定演算部10の積分器の初期値に設定する。
駆動システムの速度情報Vcarを制御装置2へ取込み、電気角周波数換算部15によって、電気角周波数ωrini^に換算し、初期速度推定演算部10の推定初期値として用いる。速度情報Vcarは、必ずしも正確な値でなくても良く、鉄道車両で用いられる速度段のリレー信号等のような概算値でも良い。駆動周波数の概算値を初期値として、実施例1乃至5にかかる構成を適用することにより、更に高速かつ低トルクショックの初期速度推定を実現できる。本実施例は、駆動システムの速度情報を誘導電動機の駆動装置1に取り込めるシステムに適用できる。
本実施例では、初期速度推定演算部10に用いる推定初期値を実速度に近付けることができるため、実施例5よりも更に高速かつ、低トルクショックな初期速度推定を実現できる。
本実施例は、スイッチング素子やダイオードにSiC素子を用いるものである。以下、実施例1乃至6との相違点を中心に説明する。
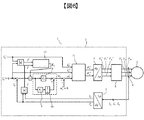
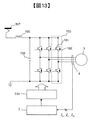
図13は、本実施例にかかる誘導電動機の駆動装置の一部を示す概略構成図であり、誘導電動機をセンサレスベクトル制御で駆動する誘導電動機の駆動装置の一部を示す概略構成図である。
図13では、鉄道車両の駆動システムの一部を例として記載している。制御装置2のベクトル制御演算に基づき、ゲートドライバ104が、半導体モジュール103のスイッチング動作を制御している。また、入力側においてはフィルタリアクトル105とフィルタコンデンサ106によりLCフィルタ回路を構成しており、架線107に流れるノイズをカットする構成となっている。
本実施例では、初期速度推定の更なる時間短縮および低トルクショック化を目的に、誘導電動機の駆動装置1の半導体モジュール103において、スイッチング素子101とダイオード102の一方もしくは両者にSiC素子を使用する。
本実施例では、低損失で高速スイッチングが可能なSiCインバータを用いることにより、キャリア周波数を向上でき、制御装置2における電流制御応答ωacrを向上できる。実施例2に記載した通り、電流制御系と速度推定系が一体化されているため、電流制御応答ωacrを向上すると、速度推定系も同一の推定応答を得ることができる。
本実施例によれば、SiCインバータとの相乗効果により、実施例6よりも更に高速かつ、低トルクショックの初期速度推定を実現できる。
本実施例は、誘導電動機の駆動装置を鉄道車両に用いたものである。以下、実施例1乃至7との相違点を中心に説明する。
図14は、本実施例にかかる誘導電動機の駆動装置を有する鉄道車両の一部を示す概略構成図である。
鉄道車両の駆動装置には、架線107から集電装置を介して電力が供給され、誘導電動機の駆動装置1を経由して交流電力が誘導電動機3に供給されることにより、誘導電動機3は駆動する。誘導電動機3は、減速ギアを介して、鉄道車両の車軸と連結されており、車軸に接続された車輪109とレール108間に生じる接線力により鉄道車両は走行する。
実施例1乃至7の誘導電動機の駆動装置1を鉄道車両に適用すれば、初期速度推定時間を短縮し、トルクショックを大幅に低減できるため、鉄道車両の停車や惰行時からの再起動時において、鉄道車両の車体振動を低減し、乗客の乗り心地を改善できる。
1…誘導電動機の駆動装置、2…制御装置、3…誘導電動機、4…電流検出器、5…座標変換器、6…PWM演算部、7…座標変換器、8…比例ゲイン、9…積分ゲイン、10…初期速度推定演算部、11…電圧指令演算部、12…速度推定変化率演算部、13…d軸ブースト制御演算部、14…ゲイン、15…電流制御器、16…d軸二次磁束指令演算部、100…電力変換器、101…スイッチング素子、102…ダイオード、103…半導体モジュール、104…ゲートドライバ、105…フィルタリアクトル、106…フィルタコンデンサ、107…架線、108…レール、109…車輪
Claims (16)
- 誘導電動機をセンサレスベクトル制御で駆動する誘導電動機の駆動装置であって、
外部からの指令に基づき前記誘導電動機を制御する制御装置が、前記誘導電動機への通電開始時の駆動周波数を、前記誘導電動機の電流検出手段によって検出した電流値により修正して初期速度を推定し、更に、当該修正時における前記駆動周波数の変化率を、検出された前記電流値に応じて変化させる初期速度推定部を有することを特徴とする誘導電動機の駆動装置。 - 請求項1に記載の誘導電動機の駆動装置において、
前記初期速度推定部が、q軸電流指令値とq軸電流検出値の偏差をゼロとなるように制御することを特徴とする誘導電動機の駆動装置。 - 請求項1乃至請求項2のいずれかに記載の誘導電動機の駆動装置において、
前記初期速度推定部が、初期速度の推定時における通電開始時のd軸電流検出値が、d軸電流指令値に対して大きくなるに従って、前記駆動周波数の変化率を、通電開始時よりも高くすることを特徴とする誘導電動機の駆動装置。 - 請求項1乃至請求項3のいずれかに記載の誘導電動機の駆動装置において、
前記初期速度推定部が、推定した初期速度が、所定の閾値以下になった際に、第1のd軸電流指令値にd軸電流補償量を加算することにより、第2のd軸電流指令値を演算することを特徴とする誘導電動機の駆動装置。 - 請求項1乃至請求項4のいずれかに記載の誘導電動機の駆動装置において、
前記初期速度推定部の制御ゲインが、d軸二次磁束指令値を含み、当該d軸二次磁束指令値として、d軸電流指令の波形または印加時間に応じて過渡的に変化するd軸二次磁束の演算指令値が用いられることを特徴とする誘導電動機の駆動装置。 - 請求項1乃至請求項5のいずれかに記載の誘導電動機の駆動装置において、
前記初期速度推定部の推定初期値が、前記制御装置の外部から入力される速度情報に基づいて設定されることを特徴とする誘導電動機の駆動装置。 - 請求項1乃至請求項6のいずれかに記載の誘導電動機の駆動装置において、
前記誘導電動機を駆動する電力変換器が、SiCインバータであることを特徴とする誘導電動機の駆動装置。 - 請求項1乃至請求項7のいずれかに記載の誘導電動機の駆動装置を搭載した電気車。
- 誘導電動機のセンサレスベクトル制御における初期速度推定方法であって、
誘導電動機の制御装置が、前記誘導電動機への通電開始時の駆動周波数を、前記誘導電動機に流れる電流値により修正し、更に、修正時における前記駆動周波数の変化率を、前記電流値に応じて変化させることを特徴とする初期速度推定方法。 - 請求項9に記載の初期速度推定方法において、
前記誘導電動機の制御装置が、q軸電流指令値とq軸電流検出値の偏差をゼロとなるように制御することを特徴とする初期速度推定方法。 - 請求項9乃至請求項10のいずれかに記載の初期速度推定方法において、
前記誘導電動機の制御装置が、初期速度の推定時における通電開始時のd軸電流検出値が、d軸電流指令値に対して大きくなるに従って、前記駆動周波数の変化率を、通電開始時よりも高くすることを特徴とする初期速度の推定方法。 - 請求項9乃至請求項11のいずれかに記載の初期速度推定方法において、
前記誘導電動機の制御装置が、推定した初期速度が、所定の閾値以下になった際に、第1のd軸電流指令値にd軸電流補償量を加算することにより、第2のd軸電流指令値を演算することを特徴とする初期速度推定方法。 - 請求項9乃至請求項12のいずれかに記載の初期速度推定方法において、
前記誘導電動機の制御装置が、制御ゲインとして、d軸二次磁束指令値を含み、当該d軸二次磁束指令値として、d軸電流指令の波形または印加時間に応じて過渡的に変化するd軸二次磁束の演算指令値を用いることを特徴とする初期速度推定方法。 - 請求項9乃至請求項13のいずれかに記載の初期速度推定方法において、
推定初期値が、前記誘導電動機の制御装置の外部から入力される速度情報に基づいて設定されることを特徴とする初期速度推定方法。 - 請求項9乃至請求項14のいずれかに記載の初期速度推定方法において、
前記誘導電動機の制御装置が、SiCインバータを制御することを特徴とする初期速度推定方法。 - 請求項9乃至請求項15のいずれかに記載の初期速度推定方法を用いることにより電気車の誘導電動機を駆動する方法。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017062050A JP2018166350A (ja) | 2017-03-28 | 2017-03-28 | 誘導電動機の駆動装置 |
| PCT/JP2018/003473 WO2018179822A1 (ja) | 2017-03-28 | 2018-02-01 | 誘導電動機の駆動装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017062050A JP2018166350A (ja) | 2017-03-28 | 2017-03-28 | 誘導電動機の駆動装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2018166350A true JP2018166350A (ja) | 2018-10-25 |
Family
ID=63674747
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017062050A Pending JP2018166350A (ja) | 2017-03-28 | 2017-03-28 | 誘導電動機の駆動装置 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP2018166350A (ja) |
| WO (1) | WO2018179822A1 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2022061581A (ja) * | 2020-10-07 | 2022-04-19 | 株式会社日立製作所 | 負荷駆動システム及びその方法,鉄道車両及びその運用方法 |
| JP2023006200A (ja) * | 2021-06-30 | 2023-01-18 | 株式会社日立製作所 | インバータ駆動制御装置およびインバータ駆動制御方法 |
| JP7517939B2 (ja) | 2020-10-05 | 2024-07-17 | 株式会社日立製作所 | 誘導電動機の駆動制御装置および駆動制御方法 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6316904B1 (en) * | 2000-06-27 | 2001-11-13 | Ford Global Technologies, Inc. | Speed and rotor time constant estimation for torque control of an induction motor |
| JP4120503B2 (ja) * | 2003-07-22 | 2008-07-16 | 株式会社日立製作所 | 誘導電動機の制御方法 |
| US20150084576A1 (en) * | 2013-05-03 | 2015-03-26 | Texas Instruments Incorporated | Low Speed and High Speed Controller Architecture for Electric Motors |
| JP6431788B2 (ja) * | 2015-03-05 | 2018-11-28 | 株式会社日立産機システム | 電力変換装置およびその制御法 |
-
2017
- 2017-03-28 JP JP2017062050A patent/JP2018166350A/ja active Pending
-
2018
- 2018-02-01 WO PCT/JP2018/003473 patent/WO2018179822A1/ja not_active Ceased
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7517939B2 (ja) | 2020-10-05 | 2024-07-17 | 株式会社日立製作所 | 誘導電動機の駆動制御装置および駆動制御方法 |
| JP2022061581A (ja) * | 2020-10-07 | 2022-04-19 | 株式会社日立製作所 | 負荷駆動システム及びその方法,鉄道車両及びその運用方法 |
| JP7500382B2 (ja) | 2020-10-07 | 2024-06-17 | 株式会社日立製作所 | 負荷駆動システム及びその方法,鉄道車両及びその運用方法 |
| JP2023006200A (ja) * | 2021-06-30 | 2023-01-18 | 株式会社日立製作所 | インバータ駆動制御装置およびインバータ駆動制御方法 |
| JP7636279B2 (ja) | 2021-06-30 | 2025-02-26 | 株式会社日立製作所 | インバータ駆動制御装置およびインバータ駆動制御方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2018179822A1 (ja) | 2018-10-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7595600B2 (en) | Method and system for torque control in permanent magnet machines | |
| JP4082444B1 (ja) | 永久磁石同期電動機のベクトル制御装置 | |
| JP5781235B2 (ja) | 同期機制御装置 | |
| JP6580899B2 (ja) | ドライブシステムおよびインバータ装置 | |
| JP5550672B2 (ja) | モータ制御装置 | |
| JPWO2019239657A1 (ja) | 永久磁石同期電動機の駆動装置、駆動システムおよび駆動方法 | |
| JP2010200430A (ja) | 電動機の駆動制御装置 | |
| CN103368477B (zh) | 同步电动机的驱动装置以及使用该驱动装置的送风装置 | |
| JP2016189698A (ja) | 車両用回転電機の制御装置、及び制御方法 | |
| JP6396869B2 (ja) | モータ制御装置 | |
| JP6762825B2 (ja) | 電動機制御装置およびドライブシステム | |
| JP6449129B2 (ja) | 電力変換装置 | |
| WO2018179822A1 (ja) | 誘導電動機の駆動装置 | |
| JP4596906B2 (ja) | 電動機の制御装置 | |
| JP4581739B2 (ja) | 電動機の駆動装置 | |
| JP2015165757A (ja) | インバータ制御装置及びその方法 | |
| JP5361452B2 (ja) | 同期電動機のセンサレス制御装置 | |
| KR101979999B1 (ko) | 영구 자석 동기 모터의 상수 결정 장치 및 상수 결정 방법 | |
| WO2019093064A1 (ja) | 誘導電動機の駆動装置および駆動方法 | |
| JP2012175776A (ja) | モータ制御装置及びモータ駆動システム | |
| CN105830336B (zh) | 电动机的控制装置 | |
| JP2019213247A (ja) | 回転電機の制御装置 | |
| JP2005192295A (ja) | 誘導電動機の制御装置 | |
| JP7517939B2 (ja) | 誘導電動機の駆動制御装置および駆動制御方法 | |
| JP2021022965A (ja) | 誘導電動機の駆動装置、駆動方法、および電気車 |