JP2018143169A - Root crop harvester - Google Patents
Root crop harvester Download PDFInfo
- Publication number
- JP2018143169A JP2018143169A JP2017041533A JP2017041533A JP2018143169A JP 2018143169 A JP2018143169 A JP 2018143169A JP 2017041533 A JP2017041533 A JP 2017041533A JP 2017041533 A JP2017041533 A JP 2017041533A JP 2018143169 A JP2018143169 A JP 2018143169A
- Authority
- JP
- Japan
- Prior art keywords
- conveyance
- root
- pair
- transport
- extraction
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images




Landscapes
- Harvesting Machines For Root Crops (AREA)
Abstract
Description
本願発明は、人参や蕪といった根菜類の収穫作業を実行する根菜収穫機に関するものである。 The present invention relates to a root vegetable harvesting machine that performs a harvesting operation for root vegetables such as carrots and persimmons.
従来、圃場に列状に植生した根菜類を地中から引き抜いて収穫する自走式の根菜収穫機はよく知られている。本願出願人は過去に、特許文献1において開示した根菜収穫機を提案している。特許文献1の根菜収穫機は、圃場に植生した根菜類の茎葉部を左右から挟持して引き抜く引抜き部と、前記引抜き部から受け継いだ根菜類を後方に搬送する搬送部とを備えていて、引抜き部の後端側を搬送部の前端上方側に上下に重複するように位置させている。このため、圃場面に対する引抜き部の前後傾斜角度と、圃場面に対する搬送部の前後傾斜角度とを異ならせることが可能になり、引抜き部を寝かせて根菜類を確実に引き抜きできるものでありながら、搬送部を引抜き部よりも急角度で後方斜め上向きに傾斜させて機体全長を短くコンパクトなものにできるという利点がある。
2. Description of the Related Art Conventionally, a self-propelled root vegetable harvesting machine that extracts and harvests root vegetables grown in a line on a farm field from the ground is well known. In the past, the present applicant has proposed the root vegetable harvesting machine disclosed in
ところで、根菜類を栽培するにおいては、1つの畝に根菜類を複数条植えていることがある。特許文献1の根菜収穫機を用いて1つの畝に複数条植生した根菜類を収穫する場合、引抜き部と搬送部とが同じ搬送速度で駆動するため、隣接して植生していた根菜類が重なって引き抜かれ搬送されることになる(搬送密度が高い状態になる)。そうすると、搬送途次での根切り・葉切り等の調製工程において、根菜類が重なり合っているため互いに邪魔をし、各根菜類の切断位置が不揃いになるという問題を招来するおそれがあった。
By the way, when root vegetables are cultivated, a plurality of root vegetables may be planted in one persimmon. When harvesting a plurality of root vegetables that have been vegetated on one persimmon using the root vegetable harvesting machine of
本願発明は、上記の問題を解消した根菜収穫機を提供することを技術的課題としている。 This invention makes it a technical subject to provide the root vegetable harvesting machine which eliminated the said problem.
本願発明に係る根菜収穫機は、圃場に植生した根菜類の茎葉部を左右から挟持して引き抜く引抜き部と、前記引抜き部から受け継いだ根菜類を後方に搬送する搬送部とを備え、引抜き部の後端側を搬送部の前端下方側に上下に重複するように位置させ、引抜き部の搬送速度と搬送部の搬送速度とに速度差を持たせているというものである。 The root vegetable harvesting machine according to the present invention comprises a pulling part that pulls out the roots and leaves of the root vegetables planted in the field from the left and right, and a transporting part that transports the root vegetables inherited from the pulling part to the rear. The rear end side is positioned so as to overlap vertically below the front end of the transport unit, so that there is a speed difference between the transport speed of the pulling unit and the transport speed of the transport unit.
本願発明の根菜収穫機において、搬送部の搬送速度が引抜き部の搬送速度よりも速くなるように設定してもよい。 In the root vegetable harvesting machine of the present invention, the conveyance speed of the conveyance unit may be set to be faster than the conveyance speed of the extraction unit.
また、本願発明の根菜収穫機において、引抜き部と搬送部とを搭載した走行機体を備え、引抜き部の搬送速度を走行機体の移動速度に同調させるようにしてもよい。 Further, the root vegetable harvesting machine of the present invention may be provided with a traveling machine body on which the extraction unit and the conveyance unit are mounted, and the conveyance speed of the extraction unit may be synchronized with the moving speed of the traveling machine body.
更に、本願発明の根菜収穫機において、引抜き部と搬送部とはそれぞれ、根菜類を挟持搬送する左右一対の無端帯を備え、引抜き部における無端帯対の挟持力が搬送部における無端帯対の挟持力よりも大きくなるように設定してもよい。 Further, in the root vegetable harvesting machine of the present invention, each of the extraction unit and the conveyance unit includes a pair of left and right endless bands for nipping and conveying the root vegetables, and the clamping force of the endless band pair in the extraction unit is the same as that of the endless band pair in the conveyance unit. You may set so that it may become larger than pinching force.
本願発明によると、圃場に植生した根菜類の茎葉部を左右から挟持して引き抜く引抜き部と、前記引抜き部から受け継いだ根菜類を後方に搬送する搬送部とを備え、引抜き部の後端側を搬送部の前端下方側に上下に重複するように位置させ、引抜き部の搬送速度と搬送部の搬送速度とに速度差を持たせているから、根菜類の植生状態や作業状況等に対応して、引抜き部の搬送速度と搬送部の搬送速度とを設定することが可能になる。根菜類の植生状態等に拘らず、搬送途次での根切り・葉切りといった調製の精度を高く維持できる。また、引抜き部を寝かせて引き抜き性を維持しつつ、搬送部を引抜き部よりも急角度で後方斜め上向きに傾斜させて機体全長を短くすることも可能である。 According to the invention of the present application, it is provided with a pulling portion that pulls out the stems and leaves of the root vegetables planted in the field from the left and right, and a transporting portion that transports the root vegetables inherited from the pulling portion backward, and the rear end side of the pulling portion Is positioned so as to overlap vertically below the front end of the transfer unit, and there is a speed difference between the transfer speed of the extraction unit and the transfer unit, so it corresponds to the vegetation state of the root vegetables and the work situation Thus, it is possible to set the conveyance speed of the extraction unit and the conveyance speed of the conveyance unit. Regardless of the vegetation state of root vegetables, etc., it is possible to maintain high accuracy of preparation such as root cutting and leaf cutting in the course of conveyance. In addition, it is possible to make the entire length of the machine body shorter by laying the pull-out section and maintaining the pullability while tilting the transport section obliquely rearward and upward at a steeper angle than the pull-out section.
特に、搬送部の搬送速度が引抜き部の搬送速度よりも速くなるように設定すれば、1つの畝に複数条植生した根菜類を収穫する場合、隣接して植生していた根菜類が重なって引き抜かれたとしても、その後の搬送部で重なり合いをバラバラに分けて搬送できる。従って、搬送途次での根切り・葉切りといった調製の精度維持がし易くなる。 In particular, if the transport speed of the transport section is set to be faster than the transport speed of the pull-out section, when root vegetables grown in a plurality of strips are harvested on one persimmon, the root vegetables that have been vegetated adjacent to each other overlap. Even if it is pulled out, the overlap can be separated and conveyed in the subsequent conveying section. Therefore, it becomes easy to maintain the accuracy of preparation such as root cutting and leaf cutting in the course of conveyance.
次に、本願発明を具体化した実施形態を図面に基づいて説明する。実施形態の根菜収穫機は、根菜類Kを圃場から引き抜き、挟持搬送して収穫するものである。なお、本願において「根菜類K」とは、例えば人参や蕪等の根野菜類のほか、玉葱、大蒜、ユリ根等の球根類をも含む概念である。 Next, an embodiment of the present invention will be described with reference to the drawings. The root vegetable harvesting machine according to the embodiment is for harvesting root vegetables K by pulling them out from the field, holding and conveying them. In the present application, “root vegetables K” is a concept including, for example, root vegetables such as carrots and persimmons, and bulbs such as onion, large persimmon, and lily roots.
図1〜図3に示すように、実施形態の根菜収穫機は、走行部としての左右一対の走行クローラ2a,2bで支持した走行機体1を備えている。走行機体1の前部右側には、前側から順に、操縦コラム4、運転座席5及びエンジン6を配置している。走行機体1の後部側にはトランスミッション7を配置している。エンジン6からトランスミッション7に伝わった動力を、左右一対の走行クローラ2a,2bの後部に設けた駆動輪8に伝達するように構成している。
As shown in FIGS. 1 to 3, the root vegetable harvesting machine according to the embodiment includes a
走行機体1の左側には、根菜類Kを引き抜いて挟持搬送する収穫作業装置3を配置している。収穫作業装置3は、圃場に植生した根菜類Kを引き抜く引抜き部11と、引抜き部11から根菜類Kを受け継いで後方に搬送する搬送部12とを備えている。引抜き部11は、前端側を圃場面に臨ませて後方斜め上向き(前低後高状)に傾斜している。搬送部12の前端側は、引抜き部11の後端上方側に上下に重なるように位置している。引抜き部11と搬送部12とが上下に重複する領域は、引抜き部11から搬送部12に根菜類Kを受け渡す受継ぎ部13になっている。
On the left side of the
引抜き部11を支持する引抜きフレーム11aと、搬送部12を支持する搬送フレーム12aとは互いに連結している。搬送フレーム12aは、ブラケットを介して、走行機体1に設けた横向きの回動支軸部9に連結している。引抜き部11及び搬送部12は、引抜き部11を圃場に対して昇降させるように、回動支軸部9を中心として上下回動可能になっている。
The
引抜きフレーム11aには、左右一対の始端ホイール11b及び終端ホイール11cを装着している。左右のホイール11b,11c対には、無端帯としての引抜きベルト11eを巻き掛けている。引抜きベルト11eの前後中途部には、複数の中間ホイール11dを当接させている。左右一対の引抜きベルト11eが互いに内向きに周回駆動することによって、根菜類Kは圃場から引き抜かれて、根菜類Kの茎葉部KSが引抜きベルト11eで左右から挟持されつつ後ろ斜め上方に搬送される。
A pair of left and right
搬送フレーム12aには、引抜きフレーム11aと同様に、左右一対の始端ホイール12b及び終端ホイール12cを装着している。左右のホイール12b,12c対には、無端帯としての搬送ベルト12eを巻き掛けている。搬送ベルト12eの前後中途部には、複数の中間ホイール12dを当接させている。左右一対の搬送ベルト12eが互いに内向きに周回駆動することによって、引抜きベルト11eから受け渡された根菜類Kの茎葉部KSが搬送ベルト12eで左右から挟持されつつ後ろ斜め上方に搬送される。
Similarly to the pull-out
図2及び図3に示すように、引抜きベルト11e対の挟持部分(突合せ部分)と、搬送ベルト12e対の挟持部分(突合せ部分)とは一直線状に延びている。これらの挟持部分は、引抜きベルト11e対の後端側と搬送ベルト12e対の前端側とにおいて上下に重なり合っている。当該重複部分(受継ぎ部13)において根菜類Kの茎葉部KSが引抜きベルト11e対から搬送ベルト12e対に受け継がれる。すなわち、引抜きベルト11e対や搬送ベルト12e対による根菜類Kの茎葉部KSの挟持搬送は、一直線状に延びる挟持部分(搬送ラインH)に沿って行われる。
As shown in FIGS. 2 and 3, the clamping part (butting part) of the pair of
なお、詳細な図示は省略するが、引抜き部11の始端ホイール11b対の箇所にこれらと一体的に回転する大径の掻込みホイールを設けることによって、収穫作業装置3における挟持搬送の開始部を構成している。
In addition, although detailed illustration is abbreviate | omitted, the start part of the pinching conveyance in the
また、引抜きベルト11e対及び搬送ベルト12e対はいずれも、各ホイール11b〜11d,12b〜12dの外周に形成したV溝に嵌まるVベルト部と、根菜類Kの茎葉部KSを弾力的に挟持する軟質挟持部とを有している。軟質挟持部は、挟持時に根菜類Kの茎葉部KSを切断しないため、スポンジゴム等の軟質発泡体の表面をゴム硬度が高い硬質ゴム又はシリコーンゴム等の表層で覆ったものになっている。
In addition, the
実施形態では、例えば軟質発泡体の発泡比率等を変更したり表層の剛性を変更したりして、引抜きベルト11e対の挟持力を、搬送ベルト12e対の挟持力よりも大きくなるように設定している。このため、引抜き部11では、根菜類Kの引抜き性能が向上する一方、搬送部12では、搬送途中で実行される肩揃え等の位置調節(茎葉部KSのスライド調節)がスムーズに行える。
In the embodiment, for example, by changing the foaming ratio of the soft foam or changing the rigidity of the surface layer, the holding force of the
図1〜図3に示すように、引抜き部11の前方左側(根菜類Kの未掘起し側)には、引抜き対象の根菜類Kの茎葉部KSをそれより左側(未掘起し側)にある根菜類Kの茎葉部KSと絡まないように捌くデバイダ14を備えている。デバイダ14は、縦方向に周回駆動するタインチェンの外周に装着した複数の分草タイン15を有している。各分草タイン15は、タインチェンの縦回転によって、走行機体1の進行方向前側において圃場側から上向きに移動するように構成している。
As shown in FIGS. 1 to 3, on the front left side (the unexcavated side of the root vegetable K) of the
引抜き部11の前方右側(根菜類Kの既掘起し側)には、引抜き対象の根菜類Kの茎葉部KSを搬送ラインH方向に掻き込む茎葉掻込み装置16を配置している。茎葉掻込み装置16は、横方向に周回駆動する掻込みベルトの外周に装着した複数の掻込みタイン17を有している。各掻込みタイン17は、掻込みベルトの横回転によって、走行機体1の進行方向前側において圃場側から上向きに移動するように構成している。掻込みタイン17の周回方向と分草タイン15の周回方向とが引抜き部11の前方において互いに略直交するように、茎葉掻込み装置16とデバイダ14との位置関係を設定している。
On the front right side of the extraction portion 11 (the side where the root vegetables K have already been dug), a
デバイダ14の分草タイン15群と、茎葉掻込み装置16の掻込みタイン17群とによって、引抜き対象である根菜類Kの垂れ下がった(倒伏した)茎葉部KSの左右両側をも上向きに掻き上げできる。このため、収穫作業装置3における挟持搬送の開始部によって、引抜き対象の根菜類Kは圃場からスムーズに引き抜かれ、その茎葉部KSが確実に挟持される。
By the
図1に示すように、走行機体1の前部には、走行機体1の左右中央側に設けた上下の回動支点20,21を中心にして上下回動可能な平行リンク22,23を設けている。平行リンク22,23の先端側には縦支持杆24を連結している。縦支持杆24の下端側には、根菜類Kの根部より下方を掘り起こすサブソイラ体25を固定している。平行リンク22,23のうち下リンク23の基端側と走行機体1との間には、油圧シリンダ26を装架している。油圧シリンダ26の伸縮動によって平行リンク22,23が昇降回動するように構成している。
As shown in FIG. 1,
図1及び図2に示すように、上回動支点20の掘起し入力軸20aに固定した第1分岐プーリ28とエンジン6の出力プーリ27とに無端ベルト29を巻き掛けて、掘起し入力軸20aを回転駆動させるように構成している。掘起し入力軸20aには、これに被嵌した偏心ボス(図示省略)を介して上リンク22の基端側を連結している。掘起し入力軸20a及び偏心ボスを経由した回転動力によって、上リンク22が前後方向に振動駆動するように構成している。圃場に差し込まれたサブソイラ体25は、根菜類Kの根部より下方において上下方向や前後方向に振動する。その結果、走行機体1の前進移動に連れて根菜類Kの根部が引き抜き易いように掘り起こされる。
As shown in FIGS. 1 and 2, the
図1及び図2に示すように、回動支軸部9と同芯軸上に設けたパイプ状の動力伝達横フレーム30の先端側に前向きパイプフレーム31を連結している。前向きパイプフレーム31の先端側には、収穫作業装置3の長手方向中途部の上方において右向きに(既掘起し側に向けて)延びる茎葉掻込み用伝達パイプ32を連結している。茎葉掻込み用伝達パイプ32の左側端部(未掘起し側端部)から前向きに延びる伝達ケース33に、デバイダ用伝達ケース34を介してデバイダ14の上部を連結している。
As shown in FIGS. 1 and 2, a forward-facing
上回動支点20の掘起し入力軸20aには、第1分岐プーリ28とは別に、第2分岐プーリ37を固定している。一方、回動支軸部9と同芯軸上に設けた動力伝達横フレーム30内にはデバイダ入力軸39を嵌挿している。掘起し入力軸20a上の第2分岐プーリ37と、デバイダ入力軸39の一端側に固定したデバイダ入力プーリ40とに無端ベルト38を巻き掛けて、デバイダ入力軸39を回転駆動させるように構成している。デバイダ入力軸39に伝わった回転動力は、前向きパイプフレーム31、茎葉掻込み用伝達パイプ32、伝達ケース33及びデバイダ用伝達ケース34内にある伝達軸等の伝達機構を介して、茎葉掻込み装置16並びにデバイダ14に伝達され、茎葉掻込み装置16とデバイダ14とを回転駆動させる。
Aside from the
トランスミッション7に設けたPTO出力軸36から、チェンやスプロケット等の伝達機構を介して、搬送部12(終端ホイール12c対)の後方に配置した後部伝動ケース42に動力伝達される。PTO出力軸36からは同様に、搬送部12の各終端ホイール12cと同軸上にある入力部(図示省略)にも伝達され、搬送ベルト12e対と引抜きベルト11e対とを回転駆動させる(詳細は後述する)。搬送部12の後方には、根菜類Kの茎葉部KSを水平後方に搬送する左右一対の無端搬送帯を上下に並べてなる茎葉排出装置43と、左右一対の水平回転刃からなる切断装置44とを配置している。後部伝動ケース42からは、茎葉排出装置43に回転動力が伝達される。切断装置44には、PTO出力軸36から回転動力が伝達される。
Power is transmitted from a
搬送部12の搬送方向中途部の下方には、根菜類Kの根部先端側にある根毛部分(尻尾部分)を切断する根毛切断装置56を配置している。根毛切断装置56も左右一対の水平回転刃を有している。詳細な図示は省略するが、これらの水平回転刃には、PTO出力軸36から回転動力が伝達される。
A root
切断装置44の下方には、茎葉部KSを切除分離した根菜類Kを受け止めて走行機体1の後部右側に搬送する選別コンベヤ46を配置している。回動支軸部9と同芯軸上にあるデバイダ入力軸39の他端側に固定した中継プーリ41から、チェンやスプロケット等の伝達機構を介して、選別コンベヤ46の入力部46aに動力伝達される。選別コンベヤ46上にある根菜類K中の不良品は、走行機体1の後方を歩行する作業者が選り分ける。
Below the cutting
選別コンベヤ46の排出端側には、前後長手のコンテナ台49を配置している。実施形態では、走行機体1の右側面に蝶番を介してコンテナ台49の基端側を上下回動可能に連結している。非作業時にはコンテナ台49を上向き回動させて収納し、作業時にはコンテナ台49を下向き回動させて略水平に保持する。略水平に保持したコンテナ台49上に、良品の根菜類Kを受け止めて蓄積するコンテナ48が載置される。なお、切断された根菜類Kの茎葉部KSは、茎葉排出装置43の後端側に延設したガイド板55に沿って圃場面に放出される。
On the discharge end side of the sorting
収穫作業装置3(引抜き部11及び搬送部12)、茎葉掻込み装置16並びにデバイダ14は、回動支軸部9を中心にして一体的に上下回動するように、それぞれのフレーム同士を連結している。これらの前部側には支持杆51を前向きに突設している。支持杆51の前端側には接地前輪52を装着している。収穫作業装置3(引抜き部11及び搬送部12)、茎葉掻込み装置16並びにデバイダ14は、接地前輪52によって圃場面に対して支持される。
The harvesting operation device 3 (the
非作業時や路上走行時には、油圧シリンダ26を伸長動させて平行リンク22,23を上向き回動させることによって、サブソイラ体25、引抜き部11、茎葉掻込み装置16及びデバイダ14の下端側を圃場面と干渉しない上昇位置に保持する。実施形態では、下リンク23の側面に設けた押し上げ用の回転コロ53の上面を引抜きフレーム11aの下面側に設けたL字状のガイド部材54の下面に沿って移動するように構成している。このため、単一の油圧シリンダ26の駆動によって、サブソイラ体25、引抜き部11、茎葉掻込み装置16及びデバイダ14の下端側を一体的に圃場面から上方に大きく持ち上げできる。
When the vehicle is not working or running on the road, the
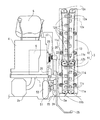
次に、図3及び図4を参照しながら、引抜き部11と搬送部12との連動構造の詳細について説明する。前述の通り、引抜き部11は、それぞれ引抜きベルト11eを巻き掛けた始端ホイール11b対及び終端ホイール11c対を有している。搬送部12は、それぞれ搬送ベルト12eを巻き掛けた始端ホイール12b対及び終端ホイール12c対を有している。実施形態において、引抜き部11の各ホイール11b,11cの直径は、搬送部12の各ホイール12b,12cの直径よりも小さくなっている。引抜き部11における左右の終端ホイール11cの回転軸61は、両端に自在継手を有する自在継手軸63を介して、搬送部12における左右の始端ホイール12bの回転軸62に連動連結している。
Next, the details of the interlocking structure between the
搬送部12の各終端ホイール12cへの入力部(図示省略)に伝わった動力は、搬送部12の終端ホイール12c対を介して、搬送ベルト12e対を回転駆動させる。搬送ベルト12e対によって従動回転する搬送部12の始端ホイール12b対から、自在継手軸63を介して引抜き部11の終端ホイール11c対に動力伝達され、引抜き部11の終端ホイール11c対が引抜きベルト11e対を回転駆動させる。すなわち、トランスミッション7に設けたPTO出力軸36からチェンやスプロケット等の伝達機構を介して伝わった動力が、搬送部12を介して引抜き部11にまで伝達される。
The power transmitted to the input unit (not shown) to each
この場合、引抜き部11の各終端ホイール11cと搬送部12の各始端ホイール12bとは直径が異なっているため、引抜きベルト11e対の搬送速度V1と搬送ベルト12e対の搬送速度V2とには速度差が生ずる。実施形態では、引抜き部11の各終端ホイール11cの直径が搬送部12の各始端ホイール12bの直径よりも小さく且つ引抜き部11側の回転軸61と搬送部12側の回転軸62とを自在継手軸63で連動連結しているから、引抜き部11の各終端ホイール11cと搬送部12の各始端ホイール12bとは、ほぼ同じ回転数で回転することになり(自在継手軸63で若干の減衰はある)、搬送ベルト12e対の搬送速度V2が引抜きベルト11e対の搬送速度V1よりも速くなっている(V2>V1)。そして、トランスミッション7経由の動力で、搬送ベルト12e対及び引抜きベルト11e対を回転駆動させることを考慮して、引抜きベルト11e対の搬送速度V1を走行機体1の移動速度Vに同調させている(V=V1<V2)。搬送ベルト12e対の搬送速度V2が引抜きベルト11e対の搬送速度V1(走行機体1の移動速度V)の例えば1.1〜1.2倍程度になるように、引抜き部11の各終端ホイール11cの直径と搬送部12の各始端ホイール12bとの直径との関係を設定している(V2=1.1〜1.2×V1)。
In this case, each
上記の構成において、収穫作業装置3は、圃場の根菜類Kが引抜き部11の引抜きベルト11e対の前端側で挟持されて圃場から引き抜かれると、引抜き部11の後端側に位置する受継ぎ部13に向けて引抜きベルト11e対が根菜類Kを挟持搬送する。そして、受継ぎ部13では、根菜類Kの茎葉部KSの上部側を搬送部12の搬送ベルト12e対が挟持して、引抜き部11から搬送部12への根菜類Kの受け継ぎがなされる。引抜き部11から搬送部12へ受け渡された根菜類Kは、搬送ベルト12e対で更に後方側に挟持搬送され、根毛切断装置56や切断装置44で後処理される。
In the above-described configuration, the
上記の構成を採用すると、根菜類Kの植生状態や作業状況等に対応して、引抜き部11の搬送速度V1と搬送部12の搬送速度V2とを設定することが可能になる。根菜類Kの植生状態等に拘らず、搬送途次での根切り・葉切りといった調製の精度を高く維持できる。また、引抜き部11を寝かせて引き抜き性を維持しつつ、搬送部12を引抜き部11よりも急角度で後方斜め上向きに傾斜させて機体全長を短くすることも可能である。
When the above configuration is adopted, it is possible to set the conveyance speed V1 of the
特に実施形態では、搬送部12の搬送速度V2が引抜き部11の搬送速度V2よりも速くなるように設定しているから、1つの畝に複数条植生した根菜類Kを収穫する場合、隣接して植生していた根菜類Kが重なって引き抜かれたとしても、その後の搬送部12で重なり合いをバラバラに分けて搬送できる。従って、搬送途次での根切り・葉切りといった調製の精度維持がし易くなるのである。
In particular, in the embodiment, since the conveyance speed V2 of the
なお、引抜き部11及び搬送部12への動力伝達構造は、上述の実施形態のものに限らず、エンジン6から直接動力伝達する構成でもよいし、油圧モータや電動モータを利用する構成でもよい。また、引抜き部11から搬送部12に向けて動力伝達するように構成してもよいし、引抜き部11と搬送部12とをそれぞれ独立して駆動させる構成でも構わない。引抜き部11と搬送部12と動力伝達可能に連結する場合は、実施形態のような自在継手軸63を採用するに限らず、ベルトプーリ伝動系やチェンスプロケット伝動系等で連結することも可能である。
In addition, the power transmission structure to the
図5は、引抜き部11と搬送部12との連動構造の別例を示している。図5に示す別例では、引抜き部11における左右の終端ホイール11cの内径側に、内歯65付きのリングギヤ部64を形成している。一方、搬送部12における左右の始端ホイール12bの回転軸62の下端側には、リングギヤ部64の内歯65に常時噛み合うベベルギヤ66を取り付けている。そして、引抜きベルト11e対の搬送速度V1を走行機体1の移動速度Vに同調させるのは先の実施形態と同様である(V=V1<V2)。また、搬送ベルト12e対の搬送速度V2が引抜きベルト11e対の搬送速度V1(走行機体1の移動速度V)の例えば1.1〜1.2倍程度になるように、引抜き部11における各リングギヤ部64の内歯65の歯数と、搬送部12の各ベベルギヤ66の歯数との関係(ギヤ比)を設定している(V2=1.1〜1.2×V1)。
FIG. 5 shows another example of the interlocking structure between the drawing
別例のように構成した場合も、先の実施形態と同様に、1つの畝に複数条植生した根菜類Kを収穫する際に、隣接して植生していた根菜類Kが重なって引き抜かれたとしても、その後の搬送部12で重なり合いをバラバラに分けて搬送でき、搬送途次での根切り・葉切りといった調製の精度維持がし易くなる。
Even when configured as another example, similar to the previous embodiment, when harvesting root vegetables K that have been vegetated in a single row, the root vegetables K that have been vegetated adjacent to each other are pulled out. Even so, the
なお、本願発明における各部の構成は図示の実施形態に限定されるものではなく、本願発明の趣旨を逸脱しない範囲で種々変更が可能である。 In addition, the structure of each part in this invention is not limited to embodiment of illustration, A various change is possible in the range which does not deviate from the meaning of this invention.
1 走行機体
3 収穫作業装置
11 引抜き部
11b 始端ホイール
11c 終端ホイール
11e 引抜きベルト
12 搬送部
12b 始端ホイール
12c 終端ホイール
12e 搬送ベルト
13 受継ぎ部
DESCRIPTION OF
Claims (4)
引抜き部の後端側を搬送部の前端下方側に上下に重複するように位置させ、
引抜き部の搬送速度と搬送部の搬送速度とに速度差を持たせている、
根菜収穫機。 A pulling part that pulls out the stems and leaves of root vegetables vegetated in the field from the left and right, and a transport part that transports the root vegetables inherited from the pulling part backward,
Position the rear end side of the withdrawal part so as to overlap vertically below the front end of the transport part,
There is a speed difference between the transport speed of the pulling section and the transport speed of the transport section.
Root crop harvesting machine.
請求項1に記載の根菜収穫機。 It is set so that the conveyance speed of the conveyance part is faster than the conveyance speed of the extraction part.
The root vegetable harvester according to claim 1.
引抜き部の搬送速度を走行機体の移動速度に同調させている、
請求項2に記載の根菜収穫機。 It is equipped with a traveling machine body equipped with a pull-out part and a conveyance part,
The conveyance speed of the extraction part is synchronized with the moving speed of the traveling aircraft.
The root vegetable harvester according to claim 2.
引抜き部における無端帯対の挟持力が搬送部における無端帯対の挟持力よりも大きくなるように設定している、
請求項2又は3に記載の根菜収穫機。 Each of the extraction unit and the conveyance unit includes a pair of left and right endless belts that sandwich and convey root vegetables,
It is set so that the clamping force of the endless belt pair in the pull-out part is larger than the clamping force of the endless belt pair in the transport part,
A root crop harvesting machine according to claim 2 or 3.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017041533A JP2018143169A (en) | 2017-03-06 | 2017-03-06 | Root crop harvester |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017041533A JP2018143169A (en) | 2017-03-06 | 2017-03-06 | Root crop harvester |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2018143169A true JP2018143169A (en) | 2018-09-20 |
Family
ID=63589005
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017041533A Pending JP2018143169A (en) | 2017-03-06 | 2017-03-06 | Root crop harvester |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2018143169A (en) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110731160A (en) * | 2019-11-14 | 2020-01-31 | 农业农村部南京农业机械化研究所 | multi-row combined harvester for header of green vegetables |
| JP2021003019A (en) * | 2019-06-25 | 2021-01-14 | 株式会社ササキコーポレーション | Rhizome crop harvesting machine |
| JP2022146798A (en) * | 2021-03-22 | 2022-10-05 | ヤンマーホールディングス株式会社 | vegetable transplanter |
-
2017
- 2017-03-06 JP JP2017041533A patent/JP2018143169A/en active Pending
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021003019A (en) * | 2019-06-25 | 2021-01-14 | 株式会社ササキコーポレーション | Rhizome crop harvesting machine |
| JP7223421B2 (en) | 2019-06-25 | 2023-02-16 | 株式会社ササキコーポレーション | rhizome crop harvester |
| CN110731160A (en) * | 2019-11-14 | 2020-01-31 | 农业农村部南京农业机械化研究所 | multi-row combined harvester for header of green vegetables |
| JP2022146798A (en) * | 2021-03-22 | 2022-10-05 | ヤンマーホールディングス株式会社 | vegetable transplanter |
| JP7414760B2 (en) | 2021-03-22 | 2024-01-16 | ヤンマーホールディングス株式会社 | vegetable harvester |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2014236681A (en) | Root crop harvester | |
| JP2018143169A (en) | Root crop harvester | |
| JP3868615B2 (en) | Green onion harvester | |
| JP4398659B2 (en) | Green onion harvester | |
| JP4531967B2 (en) | Aligning and conveying device in leek harvesting machine | |
| JP2008048642A (en) | Harvester of underground stem crop | |
| JP3803993B2 (en) | Green onion harvester | |
| JPH10257810A (en) | Welsh onion harvesting machine | |
| JP2008237105A (en) | Onion harvester for seeding | |
| JP3647617B2 (en) | Root crop harvesting machine | |
| JP2759442B2 (en) | Onion harvester | |
| JP4116403B2 (en) | Root crop crop harvester | |
| JP4539931B2 (en) | Vegetable harvesting machine | |
| JP6688028B2 (en) | Forage-raising device for subterranean crop harvester | |
| JP3455342B2 (en) | Agricultural harvester | |
| JP6484834B2 (en) | Bulb vegetable harvester | |
| JP4628522B2 (en) | Root crop harvesting machine | |
| JP3454723B2 (en) | Harvester foliage cutting device | |
| JP3667952B2 (en) | Root crop harvesting machine | |
| JP5492062B2 (en) | Stem cutting and conveying device | |
| JP2004073115A (en) | Apparatus for raising up foliage in vertical direction in harvester or the like | |
| JP2000125636A (en) | Root stock harvester and foliage guide therefor | |
| JP2001197815A (en) | Vegetable harvester | |
| JP4107755B2 (en) | Root crop crop harvester | |
| JP2867114B2 (en) | Onion harvester |