JP2018139070A - 車両用表示制御装置 - Google Patents
車両用表示制御装置 Download PDFInfo
- Publication number
- JP2018139070A JP2018139070A JP2017033825A JP2017033825A JP2018139070A JP 2018139070 A JP2018139070 A JP 2018139070A JP 2017033825 A JP2017033825 A JP 2017033825A JP 2017033825 A JP2017033825 A JP 2017033825A JP 2018139070 A JP2018139070 A JP 2018139070A
- Authority
- JP
- Japan
- Prior art keywords
- driver
- image
- display control
- state
- vehicle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






Abstract
【課題】ドライバ状態を良好にすべき場合に、ドライバが自身のドライバ状態の度合いを直感的且つより容易に理解できるようにする。【解決手段】自車のドライバの頭部を撮像するDSM13で撮像された顔画像から切り出した、眼と眉とを少なくとも含むドライバ画像を表示装置14に表示させる表示制御部116と、ドライバのドライバ状態を改善すべきタイミング、及びドライバ状態が良好な度合いであるべきタイミングのいずれかである対象タイミングを検出するタイミング検出部112とを備え、表示制御部116は、タイミング検出部112で対象タイミングを検出した場合に、ドライバ画像を表示させる。【選択図】図2
Description
本発明は、車両用表示制御装置に関するものである。
従来、ドライバ状態に応じた情報を表示装置に表示させる技術が知られている。例えば、特許文献1には、ドライバの身体状態及び心理状態の少なくとも一方のドライバ状態が運転に支障をきたす状態に変化した場合に、ドライバ状態を模擬したシンボルマークを表示させる技術が開示されている。
しかしながら、特許文献1に開示の技術のように、ドライバ状態を模擬したシンボルマークを表示させる構成では、ドライバが、自身のドライバ状態を直感的に理解することは可能かもしれないが、眠気の進行度合いといったドライバ状態の度合いまで理解することは難しい。
本発明は、上記従来の問題点に鑑みなされたものであって、その目的は、ドライバ状態を良好にすべき場合に、ドライバが自身のドライバ状態の度合いを直感的且つより容易に理解できるようにする車両用表示制御装置を提供することにある。
上記目的は独立請求項に記載の特徴の組み合わせにより達成され、また、下位請求項は、発明の更なる有利な具体例を規定する。特許請求の範囲に記載した括弧内の符号は、一つの態様として後述する実施形態に記載の具体的手段との対応関係を示すものであって、本発明の技術的範囲を限定するものではない。
上記目的を達成するために、本発明の車両用表示制御装置は、車両で用いられる表示装置(14)を制御する車両用表示制御装置であって、車両のドライバの顔部位を少なくとも撮像する撮像装置(13)で撮像された画像に基づく、顔部位を少なくとも含むドライバ画像を表示装置に表示させる表示制御部(116)と、ドライバの身体状態及び心理状態のいずれかであるドライバ状態を改善すべきタイミング、及びドライバ状態が良好な度合いであるべきタイミングのいずれかである対象タイミングを検出するタイミング検出部(112)とを備え、表示制御部は、タイミング検出部で対象タイミングを検出した場合に、ドライバ画像を表示させる。
これによれば、車両のドライバの顔部位を少なくとも撮像する撮像装置で撮像された画像に基づく、顔部位を少なくとも含むドライバ画像を表示装置に表示させるので、ドライバが自身の表情から直感的にドライバ状態を理解できる。また、ドライバは、自身の表情から経験的にドライバ状態の度合いまで理解することができるので、ドライバ状態の度合いを直感的かつより容易に理解することが可能になる。さらに、ドライバ画像は、ドライバの身体状態及び心理状態のいずれかであるドライバ状態を改善すべきタイミング、及びドライバ状態が良好な度合いであるべきタイミングのいずれかである対象タイミングを検出した場合に表示させるので、ドライバ状態を良好にすべき場合にドライバ状態を表示させることが可能になる。その結果、ドライバ状態を良好にすべき場合に、ドライバが自身のドライバ状態の度合いを直感的且つより容易に理解できるようになる。
図面を参照しながら、開示のための複数の実施形態を説明する。なお、説明の便宜上、複数の実施形態の間において、それまでの説明に用いた図に示した部分と同一の機能を有する部分については、同一の符号を付し、その説明を省略する場合がある。同一の符号を付した部分については、他の実施形態における説明を参照することができる。
(実施形態1)
<運転支援システム1の概略構成>
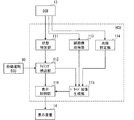
以下、本実施形態について図面を用いて説明する。図1に示す運転支援システム1は、自動車といった車両で用いられるものであり、HMI(Human Machine Interface)システム10、通信機20、ADAS(Advanced Driver Assistance Systems)ロケータ30、車両制御ECU40、周辺監視センサ50、及び自動運転ECU60を含んでいる。HMIシステム10、通信機20、ADASロケータ30、車両制御ECU40、及び自動運転ECU60は、例えば車内LANに接続されており、通信によって互いに情報をやり取りすることができる。以下では、運転支援システム1を用いる車両を自車と呼ぶ。
<運転支援システム1の概略構成>
以下、本実施形態について図面を用いて説明する。図1に示す運転支援システム1は、自動車といった車両で用いられるものであり、HMI(Human Machine Interface)システム10、通信機20、ADAS(Advanced Driver Assistance Systems)ロケータ30、車両制御ECU40、周辺監視センサ50、及び自動運転ECU60を含んでいる。HMIシステム10、通信機20、ADASロケータ30、車両制御ECU40、及び自動運転ECU60は、例えば車内LANに接続されており、通信によって互いに情報をやり取りすることができる。以下では、運転支援システム1を用いる車両を自車と呼ぶ。
通信機20は、センタとの間で通信を行う。通信機20は、携帯電話網,インターネット等の公衆通信網を介した通信を行うための通信モジュールを用いてセンタと通信を行う構成とすればよい。例えばDCM(Data Communication Module)といったテレマティクス通信に用いられる車載通信モジュールによって、テレマティクス通信で用いる通信網を介してセンタと通信を行う構成とすればよい。通信機20は、センタからダウンロードした情報を車内LANへ出力したりする。なお、通信機20は、路側機を介してセンタとの間で通信を行う構成としてもよい。
ADASロケータ30は、GNSS(Global Navigation Satellite System)受信機31、慣性センサ32、及び地図データを格納した地図データベース(以下、DB)33を備えている。GNSS受信機31は、複数の人工衛星からの測位信号を受信する。慣性センサ32は、例えば3軸ジャイロセンサ及び3軸加速度センサを備える。地図DB33は、不揮発性メモリであって、リンクデータ,ノードデータ,道路形状,構造物等の地図データを格納している。
ADASロケータ30は、GNSS受信機31で受信する測位信号と、慣性センサ32での計測結果とを組み合わせることにより、自車の車両位置を逐次測位する。なお、車両位置の測位には、自車の車輪速センサから逐次出力されるパルス信号から求めた走行距離を用いる構成としてもよい。そして、測位した車両位置を車内LANへ出力する。また、ADASロケータ30は、地図DB33から地図データを読み出し、車内LANへ出力することも行う。なお、地図データは、通信機20を用いて自車の外部から取得する構成としてもよい。
車両制御ECU40は、自車の加減速制御及び操舵制御を行う電子制御装置である。車両制御ECU40としては、操舵制御を行う操舵ECU、加減速制御を行うパワーユニット制御ECU及びブレーキECU等がある。車両制御ECU40は、自車に搭載されたアクセルポジションセンサ,ブレーキ踏力センサ,舵角センサ,車輪速センサ等の各センサから出力される検出信号を取得し、電子制御スロットル,ブレーキアクチュエータ,EPS(Electric Power Steering)モータ等の各走行制御デバイスへ制御信号を出力する。また、車両制御ECU40は、上述の各センサの検出信号を車内LANへ出力可能である。
周辺監視センサ50は、歩行者,人間以外の動物,自転車,オートバイ,他車等の移動物体、さらに路上の落下物,ガードレール,縁石,樹木等の静止物体といった障害物を検出する。他にも、走行区画線,停止線等の路面標示を検出する。周辺監視センサ50は、例えば、自車周囲の所定範囲を撮像する周辺監視カメラ、自車周囲の所定範囲に探査波を送信するミリ波レーダ、ソナー、LIDAR(Light Detection and Ranging/Laser Imaging Detect ion and Ranging)等のセンサである。周辺監視カメラは、逐次撮像する撮像画像をセンシング情報として自動運転ECU60へ逐次出力する。ソナー、ミリ波レーダ、LIDAR等の探査波を送信するセンサは、障害物によって反射された反射波を受信した場合に得られる受信信号に基づく走査結果をセンシング情報として自動運転ECU60へ逐次出力する。
自動運転ECU60は、ADASロケータ30から取得した自車の車両位置及び地図データ、周辺監視センサ50から取得したセンシング情報等から、自車の走行環境を認識する。自動運転ECU60は、認識した走行環境をもとに、自動運転によって自車を走行させるための走行計画を生成する。例えば中長期の走行計画として、自車を目的地へ向かわせるための推奨経路を生成する。また、推奨経路に従った走行を行うための短期の走行計画を生成する。具体例としては、車線変更のための操舵、速度調整のための加減速、及び障害物回避のための操舵及び制動等の実行を決定する。
そして、自動運転ECU60は、生成した走行計画に従い、自車の加速、制動、及び/又は操舵を車両制御ECU40に自動で行わせることで、ドライバに代わって運転操作を実施する自動運転を行う。以降では、自車の加速、制動、及び操舵を自動で行わせる自動運転を実施する場合を例に挙げて説明を行う。また、自動運転ECU60は、手動運転と自動運転との間での運転交代を制御する。手動運転とは、自車のブレーキ、ステアリング、スロットル、原動力といった主操縦系統について自動化を行わずにドライバが全て操作することを示す。自動運転ECU60での運転交代の制御は、自動運転区間の走行の終了、認識される走行環境若しくは周辺監視センサ50でのセンシングの不具合等に応じて、自律的に行われる構成とすればよい。この自動運転ECU60が請求項の運転交代制御装置に相当する。
なお、自動運転ECU60での運転交代の制御によって自律的に行われる運転交代以外にも、後述する操作デバイス12へのドライバによる入力操作に従って運転交代が行われる構成としてもよい。
HMIシステム10は、図1に示すように、HCU(Human Machine Interface Control Unit)11、操作デバイス12、DSM(Driver Status Monitor)13、表示装置14、及び音声出力装置15を備えており、自車のドライバからの入力操作を受け付けたり、自車のドライバのドライバ状態を監視したり、自車のドライバに向けて情報を提示したりする。ドライバ状態とは、自車のドライバの身体状態及び心理状態のいずれかであって、状態の悪化が表情に表れやすいものがより好ましい。
操作デバイス12は、車両HVのドライバが操作するスイッチ群である。操作デバイス12は、各種の設定を行うために用いられる。例えば、操作デバイス12としては、自車のステアリングのスポーク部に設けられたステアリングスイッチ等がある。
DSM13は、近赤外光源及び近赤外カメラと、これらを制御する制御ユニット等とによって構成されている。DSM13は、近赤外カメラを自車の運転席側に向けた姿勢にて、運転席正面にあたる、例えばステアリングコラムカバーに配置される。DSM13は、近赤外光源によって近赤外光を照射されたドライバの頭部を、近赤外カメラによって撮像する。このDSM13が請求項の撮像装置に相当する。近赤外カメラによる撮像画像(以下、顔画像)は、制御ユニットによって画像解析される。制御ユニットは、例えば眠気といったドライバ状態をこの顔画像から逐次検出する。よって、DSM13の近赤外カメラは、ドライバ状態を検出するのに用いる撮像装置と言い換えることができる。DSM13では、集中漫然や快不快といった眠気以外のドライバ状態を検出する構成としてもよいが、以降では眠気を検出する場合を例に挙げて説明を続ける。
DSM13は、顔画像から、画像認識処理によって顔の輪郭、目、鼻、口などの部位を検出する。また、各部位の相対的な位置関係からドライバの顔向き,顔の位置等の姿勢情報を検出する。さらに、瞼形状の変化を開眼度として算出することで、閉眼の検知を行う。そして、この閉眼度の経時的な変化,顔部位の形状的な特徴,顔部位の経時的な変化等から、ドライバ状態としての眠気の度合い(以下、眠気レベル)を検出する。DSM13は、検出した眠気レベルをHCU11へ出力する。また、DSM13は、撮像した顔画像をHCU11へ出力する。
一例として、DSM13は、眠気レベルを1〜6の6段階に区分して検出する。6段階に区分される眠気は、覚醒度の高いものから順に、全く眠くなさそうな(言い換えると覚醒状態である)眠気レベル「1」,やや眠そうな眠気レベル「2」,眠そうな眠気レベル「3」,かなり眠そうな眠気レベル「4」,非常に眠そうな眠気レベル「5」,眠っている(言い換えると睡眠状態である)眠気レベル「6」とする。
例えばDSM13は、眠気の兆候にあたる閉眼度の経時的な変化,顔部位の形状的な特徴,顔部位の経時的な変化等を検出し、眠気の兆候が見られる頻度等から眠気レベルを検出すればよい。眠気の兆候としては、閉眼度が一定以上,瞬き頻度が一定以上,視線の動きが一定量以下,顎が落ちている,頭が前に傾く等の種々のものを用いることができる。例えばDSM13は、眠気の兆候を検出した場合に、眠気の兆候を検出したことを示す信号(以下、眠気兆候信号)をHCU11へ出力する構成としてもよい。
表示装置14は、HCU11から取得した画像データに基づいて、情報通知のための種々の画像を表示画面に表示する。なお、表示装置14は、テキストも表示する構成としてもよい。表示装置14としては、例えばコンビネーションメータのディスプレイ、CID(Center Information Display)、HUD(Head-Up Display)等がある。コンビネーションメータのディスプレイは、例えば運転席前方に配置される。CIDは、センタクラスタの上方に配置される。HUDは、HCU11から取得した画像データに基づく画像の光を、フロントウインドシールドに規定された投影領域に投影することで、この画像の虚像を前景の一部と重ねてドライバが視認可能にする。なお、HUDが光を投影する投影部材は、フロントウインドシールドに限らず、透光性コンバイナであっても構わない。
音声出力装置15としては、例えばオーディオスピーカ等がある。オーディオスピーカは、例えば自車のドアの内張り内に配置される。オーディオスピーカは、再生する音声によってドライバに向けた情報の提示を行う。
HCU11は、プロセッサ、揮発性メモリ、不揮発性メモリといった非遷移的実体的記録媒体(non- transitory tangible storage medium)、I/O、これらを接続するバスを備えるマイクロコンピュータを主体として構成され、操作デバイス12,DSM13,表示装置14,音声出力装置15と車内LANとに接続される。HCU11は、不揮発性メモリに記憶された制御プログラムを実行することにより、HMIシステム10が担う機能に関する各種の処理を実行する。例えば、HCU11は、表示装置14を制御し、自車のドライバの顔部位を少なくとも含むドライバ画像を表示装置14に表示させるドライバ画像表示関連処理を実行する。
<HCU11の概略構成>
ここで、図2を用いてHCU11の概略構成についての説明を行う。HCU11は、ドライバ画像表示関連処理に関して、図2に示すように、状態特定部111、タイミング検出部112、顔画像取得部113、兆候特定部114、ドライバ画像生成部115、及び表示制御部116を機能ブロックとして備える。なお、HCU11が実行する機能の一部又は全部を、一つ或いは複数のIC等によりハードウェア的に構成してもよい。また、HCU11が備える機能ブロックの一部又は全部は、プロセッサによるソフトウェアの実行とハードウェア部材の組み合わせによって実現されてもよい。
ここで、図2を用いてHCU11の概略構成についての説明を行う。HCU11は、ドライバ画像表示関連処理に関して、図2に示すように、状態特定部111、タイミング検出部112、顔画像取得部113、兆候特定部114、ドライバ画像生成部115、及び表示制御部116を機能ブロックとして備える。なお、HCU11が実行する機能の一部又は全部を、一つ或いは複数のIC等によりハードウェア的に構成してもよい。また、HCU11が備える機能ブロックの一部又は全部は、プロセッサによるソフトウェアの実行とハードウェア部材の組み合わせによって実現されてもよい。
状態特定部111は、DSM13から逐次取得する眠気レベルから、自車のドライバの眠気レベルを逐次特定する。タイミング検出部112は、ドライバ画像を表示すべき対象タイミングを検出する。対象タイミングとしては、ドライバ状態を改善すべきタイミングとドライバ状態が良好な度合いであるべきタイミングとがある。
タイミング検出部112は、状態特定部111で特定したドライバ状態が閾値以上に悪化した度合いである場合に、ドライバ状態を改善すべきタイミングとしての対象タイミングを検出する構成とすればよい。本実施形態の例では、状態特定部111で特定した眠気レベルが閾値以上となった場合に、対象タイミングとして検出するものとすればよい。ここで言うところの閾値は任意に設定可能な値である。例えば、眠気の有無を区別するための閾値(例えば眠気レベル「1」)としてもよいし、注意喚起が必要と推定される眠気レベルを閾値としてもよい。
また、タイミング検出部112は、自動運転ECU60で自動運転から手動運転に運転交代させる場合に、ドライバ状態が良好な度合いであるべきタイミングとしての対象タイミングを検出する構成としてもよい。本実施形態の例では、自動運転から手動運転への運転交代までの予定される残り時間が設定時間以下になった場合に、対象タイミングとして検出するものとすればよい。この残り時間は、運転交代までの予定時間が自動運転ECU60から取得できる場合には、この予定時間から特定すればよい。また、運転交代の予定地点が自動運転ECU60から取得できる場合には、現在地点から予定地点までの経路上の残り距離と設定車速とから特定すればよい。運転交代までの残り距離が自動運転ECU60から取得できる場合にも、この残り距離と設定車速とから特定すればよい。なお、設定時間は、一例として、ドライバ状態が良好な度合いでなかった場合に良好な度合いにまで改善するのに要すると推測される時間以上の値とすればよい。
顔画像取得部113は、DSM13から出力される顔画像を取得する。兆候特定部114は、DSM13から出力される眠気兆候信号を取得した場合に、ドライバ状態の悪化の兆候として、ドライバの眠気の兆候を特定する。
ドライバ画像生成部115は、顔画像取得部113で取得した顔画像に基づいてドライバ画像を生成する。ドライバ画像生成部115は、顔画像取得部113で取得した顔画像から、ドライバの両眼と両眉とを少なくとも含む顔の一部の領域(以下、絞り込み領域)を切り出してドライバ画像を生成する。絞り込み領域は、顔の一部であって、眼と眉とを少なくとも含む領域であればよく、鼻や耳の一部が含まれていても構わない。また、絞り込み領域は、ドライバ画像が表示される表示領域の形状に合わせた形状であればよい。本実施形態では、絞り込み領域は、顔幅方向の辺の方が長い矩形領域であるものとする。
ドライバ画像生成部115は、タイミング検出部112で対象タイミングを検出した時点に対応する顔画像からドライバ画像を生成する構成とすればよい。対象タイミングを検出した時点に対応する顔画像とは、タイミング検出部112で対象タイミングを検出した時点に顔画像取得部113で取得した顔画像としてもよいし、直前若しくは直後に取得した顔画像としてもよい。
また、ドライバ画像生成部115は、タイミング検出部112で対象タイミングを検出した時点から直近の過去一定時間内の顔画像のうち、状態特定部111で特定した眠気レベルが最も悪化していた時点に対応する顔画像からドライバ画像を生成する構成としてもよい。この構成を採用する場合には、顔画像取得部113で逐次取得する顔画像と、この顔画像に基づいて状態特定部111で特定された眠気レベルとを紐付けてHCU11のメモリに格納しておく構成とすればよい。そして、このメモリに格納されている、対象タイミングを検出した時点から直近の過去一定時間内の顔画像のうち、紐付けられている眠気レベルが最も高い顔画像から、ドライバ画像を生成する構成とすればよい。なお、顔画像に基づいて状態特定部111で特定された眠気レベルとは、本実施形態の例では、顔画像をもとにDSM13で検出した眠気レベルをもとに状態特定部111で特定された眠気レベルを指す。
他にも、ドライバ画像生成部115は、兆候特定部114でドライバの眠気の兆候を特定した時点に対応する顔画像からドライバ画像を生成する構成としてもよい。この構成を採用する場合には、兆候特定部114でドライバの眠気の兆候を特定した場合に、顔画像取得部113で逐次取得する顔画像のうちから、この眠気の兆候を特定するもととなった顔画像をHCU11のメモリに格納しておく構成とすればよい。そして、このメモリに格納されている、眠気の兆候を特定するもととなった顔画像から、ドライバ画像を生成する構成とすればよい。一例としては、DSM13が眠気兆候信号を出力する場合に、眠気の兆候を検出するのに用いた顔画像のタイムスタンプを紐付けて出力するとともに、DSM13が顔画像を出力する場合にこの顔画像のタイムスタンプを紐付けて出力することで、眠気の兆候を特定するもととなった顔画像をHCU11で特定可能とすればよい。
表示制御部116は、タイミング検出部112で対象タイミングを検出した場合に、ドライバ画像生成部115で生成したドライバ画像を表示装置14に表示させる。表示制御部116は、ドライバ画像を静止画として表示させる構成としてもよいし、ドライバ画像を静止画のコマ送り画像として表示させる構成としてもよい。静止画のコマ送りの間隔は、任意に設定可能であって、例えば10secごと等とすればよい。また、表示制御部116は、ドライバ画像をリピート再生して表示させる構成としてもよい。
表示制御部116は、ドライバ画像生成部115が、対象タイミングを検出した時点に対応する顔画像からドライバ画像を生成する場合には、対象タイミングを検出した時点に対応する顔画像に基づくドライバ画像を表示させることになる。これによれば、ドライバが、対象タイミングを検出した時点における自身の表情をドライバ画像から確認することが可能になる。
また、表示制御部116は、ドライバ画像生成部115が、対象タイミングを検出した時点から直近の過去一定時間内の顔画像のうち、状態特定部111で特定した眠気レベルが最も悪化していた時点に対応する顔画像からドライバ画像を生成する場合には、直近の過去一定時間内で眠気レベルが最も悪化していた時点に対応する顔画像に基づくドライバ画像を表示させることになる。これによれば、ドライバが、直近の過去一定時間内で眠気レベルが最も悪化していた時点における自身の表情をドライバ画像から確認することが可能になる。ドライバは、直近の過去一定時間内で眠気レベルが最も悪化していた時点における自身の表情を確認することで、覚醒状態の改善をより強く意識しやすくなるため、覚醒状態の改善の効果が高まる。
さらに、表示制御部116は、ドライバ画像生成部115が、兆候特定部114でドライバの眠気の兆候を特定した時点に対応する顔画像からドライバ画像を生成する場合には、ドライバの眠気の兆候を特定した時点に対応する顔画像に基づくドライバ画像を表示させることになる。これによれば、ドライバが、眠気の兆候が特定された時点における自身の表情をドライバ画像から確認することが可能になる。特に、眠気の兆候を特定するもととなった顔画像に基づくドライバ画像を表示させることで、眠気の兆候が表れた時点における自身の表情をドライバ画像から確認することが可能になる。ドライバは、眠気の兆候が表れた時点における自身の表情を確認した場合にも、覚醒状態の改善をより強く意識しやすくなるため、覚醒状態の改善の効果が高まる。
<手動運転時におけるHCU11でのドライバ画像表示関連処理について>
ここで、図3のフローチャートを用いて、手動運転時におけるHCU11でのドライバ画像表示関連処理の流れの一例について説明を行う。図3のフローチャートは、自車の内燃機関又はモータジェネレータを始動させるためのスイッチ(以下、パワースイッチ)がオンになった後、自車の手動運転が開始された場合に開始する構成とすればよい。
ここで、図3のフローチャートを用いて、手動運転時におけるHCU11でのドライバ画像表示関連処理の流れの一例について説明を行う。図3のフローチャートは、自車の内燃機関又はモータジェネレータを始動させるためのスイッチ(以下、パワースイッチ)がオンになった後、自車の手動運転が開始された場合に開始する構成とすればよい。
まず、ステップS1では、状態特定部111が、DSM13から取得する眠気レベルから、自車のドライバの眠気レベルを特定する。ステップS2では、S1で特定した眠気レベルが閾値以上であった場合(S2でYES)には、ステップS4に移る。一方、S1で特定した眠気レベルが閾値未満であった場合(S2でNO)には、ステップS3に移る。
ステップS3では、手動運転時におけるドライバ画像表示関連処理の終了タイミングであった場合(S3でYES)は、ドライバ画像表示関連処理を終了する。一方、手動運転時におけるドライバ画像表示関連処理の終了タイミングでなかった場合(S3でNO)には、S1に戻って処理を繰り返す。手動運転時におけるドライバ画像表示関連処理の終了タイミングの一例としては、自車が手動運転から自動運転に運転交代したこと、自車のパワースイッチがオフになったこと等がある。
S2において眠気レベルが閾値以上であった場合に行われる処理であるステップS4では、ドライバ画像生成部115がドライバ画像を生成する。ステップS5では、表示制御部116が、S4で生成したドライバ画像の表示装置14での表示を開始させる。なお、HCU11は、ドライバ画像の表示開始のタイミングで音声出力装置15に指示を行って、警報音も出力させる構成としてもよい。
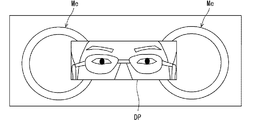
ここで、図4を用いて、表示装置14で表示されるドライバ画像の一例について説明を行う。図4では、表示装置14が、コンビネーションメータのディスプレイである場合を例に挙げて説明を行う。図4のMeがメータを示しており、DPがドライバ画像を示している。図4に示す例のように、コンビネーションメータのディスプレイにドライバ画像を表示させる場合には、ドライバの顔画像の一部を切り出したドライバ画像を、表示領域に合わせて拡大して表示させればよい。ドライバ画像は、図4に示すように、メータMeに重畳して表示させる構成とすればよい。なお、ドライバ画像は、メータMeに重ならないように表示させる構成としてもよい。
ステップS6では、手動運転時におけるドライバ画像表示関連処理の終了タイミングであった場合(S6でYES)は、表示制御部116が、ドライバ画像の表示装置14による表示を終了させた後、ドライバ画像表示関連処理を終了する。一方、手動運転時におけるドライバ画像表示関連処理の終了タイミングでなかった場合(S6でNO)には、ステップS7に移る。
ステップS7では、状態特定部111が、S1と同様にして、自車のドライバの眠気レベルを特定する。ステップS8では、S7で特定した眠気レベルが閾値以上であった場合(S8でYES)には、S6に戻って処理を繰り返す。一方、S7で特定した眠気レベルが閾値未満であった場合(S8でNO)には、ステップS9に移る。ステップS9では、表示制御部116が、ドライバ画像の表示装置14による表示を終了させ、S1に戻って処理を繰り返す。
<自動運転時におけるHCU11でのドライバ画像表示関連処理について>
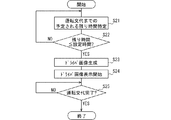
続いて、図5のフローチャートを用いて、自動運転時におけるHCU11でのドライバ画像表示関連処理の流れの一例について説明を行う。図5のフローチャートは、パワースイッチがオンになった後、自車の自動運転が開始された場合に開始する構成とすればよい。
続いて、図5のフローチャートを用いて、自動運転時におけるHCU11でのドライバ画像表示関連処理の流れの一例について説明を行う。図5のフローチャートは、パワースイッチがオンになった後、自車の自動運転が開始された場合に開始する構成とすればよい。
ステップS21では、タイミング検出部112が、自動運転から手動運転への運転交代までの予定される残り時間を特定する。ステップS22では、S21で特定した残り時間が設定時間以下となった場合(S22でYES)には、ステップS23に移る。一方、S21で特定した残り時間が設定時間以下となっていない場合(S22でNO)には、S21に戻って処理を繰り返す。
ステップS23では、ドライバ画像生成部115がドライバ画像を生成する。ステップS24では、表示制御部116が、S23で生成したドライバ画像の表示装置14での表示を開始させる。なお、表示制御部116は、ドライバ画像を表示させる場合に、自動運転から手動運転への運転交代を促すアイコン画像やテキストといったガイダンスも表示装置14に表示させる構成としてもよい。
ここで、図6を用いて、表示装置14で表示されるドライバ画像及びガイダンスの一例について説明を行う。図6でも、図5と同様に、表示装置14が、コンビネーションメータのディスプレイである場合を例に挙げて説明を行う。図4のMeがメータを示しており、DPがドライバ画像を示しており、GPがガイダンスを示している。図6に示す例のように、表示装置14の表示領域に、ドライバ画像とガイダンスとを表示させればよい。また、ドライバ画像は、ドライバの顔画像の一部を切り出したドライバ画像を、拡大して表示させればよい。
ステップS25では、自動運転から手動運転への運転交代が完了した場合(S25でYES)は、ドライバ画像表示関連処理を終了する。一方、自動運転から手動運転への運転交代が完了していない場合(S25でNO)には、S25の処理を繰り返す。自動運転から手動運転への運転交代が完了したか否かは、自動運転ECU60をモニタすることで表示制御部116が判断すればよい。
<実施形態1のまとめ>
実施形態1の構成によれば、ドライバ自身の顔画像から切り出したドライバ画像を表示装置14に表示させるので、ドライバが自身の表情から直感的に眠気の度合いまで容易に理解できる。さらに、ドライバ画像は、眠気レベルが閾値以上と特定された場合に表示させるので、覚醒状態を改善しなければならない場合にドライバに自身の眠気の度合いを理解させ、覚醒状態を改善させることが可能になる。また、ドライバ画像は、自動運転から手動運転に運転交代する場合に表示させるので、手動運転への運転交代までに覚醒していなければならない場合にドライバに自身の眠気の度合いを理解させ、手動運転に適した覚醒状態とさせることが可能になる。
実施形態1の構成によれば、ドライバ自身の顔画像から切り出したドライバ画像を表示装置14に表示させるので、ドライバが自身の表情から直感的に眠気の度合いまで容易に理解できる。さらに、ドライバ画像は、眠気レベルが閾値以上と特定された場合に表示させるので、覚醒状態を改善しなければならない場合にドライバに自身の眠気の度合いを理解させ、覚醒状態を改善させることが可能になる。また、ドライバ画像は、自動運転から手動運転に運転交代する場合に表示させるので、手動運転への運転交代までに覚醒していなければならない場合にドライバに自身の眠気の度合いを理解させ、手動運転に適した覚醒状態とさせることが可能になる。
他にも、ドライバの顔画像の一部である、眼と眉とを少なくとも含む絞り込み領域を顔画像から切り出してドライバ画像として表示させるので、絞り込み領域を拡大して表示させることが可能になる。顔部位のうちの眼は人の表情が表れやすいため、眼を含む絞り込み領域を表示させることで、表示装置14の限られた表示領域に、ドライバが自身の表情を確認しやすい領域を拡大して表示させることが可能になる。よって、ドライバが自身の眠気の度合いを特に理解しやすくなる。また、目に加えて眉を含む絞り込み領域を表示させることで、顔画像に対する絞り込み領域を小さく抑えながらも、ドライバが自身の表情を確認する助けになる情報を増やし、ドライバが自身の眠気の度合いをさらに理解しやすくなる。
さらに、DSM13(つまり、ドライバ状態を検出するのに用いる撮像装置)で撮像した顔画像に基づくドライバ画像を表示させるので、眠気といったドライバ状態を検出するのに用いた顔画像を、ドライバ画像を表示することにも利用することできる。よって、別個に撮像装置を設けるコストを抑えることができる。また、眠気といったドライバ状態を検出するのに用いる顔画像、ドライバ画像を表示することにも利用するので、ドライバ状態の悪化の兆候が表れたときの画像やドライバ状態の度合いごとの画像との紐付けを容易に行うことができる利点がある。
(実施形態2)
実施形態1では、眠気レベルといったドライバ状態の度合いをDSM13の制御ユニットで検出する構成を示したが、必ずしもこれに限らない。例えば、DSM13の制御ユニットの機能をHCU11が担う構成としてもよい。
実施形態1では、眠気レベルといったドライバ状態の度合いをDSM13の制御ユニットで検出する構成を示したが、必ずしもこれに限らない。例えば、DSM13の制御ユニットの機能をHCU11が担う構成としてもよい。
(実施形態3)
実施形態1では、顔画像からドライバの眼と眉とを少なくとも含む領域を切り出した絞り込み領域の画像をドライバ画像として表示させる構成を示したが、必ずしもこれに限らない。例えば、顔画像からドライバの眼を少なくとも含む領域を切り出した絞り込み領域の画像(図7参照)をドライバ画像として表示させる構成としてもよい。これによれば、ドライバが自身の表情を確認しやすい眼を少なくとも含む領域を拡大して表示させることが可能になるので、ドライバが自身の眠気の度合いを特に理解しやすくなる。
実施形態1では、顔画像からドライバの眼と眉とを少なくとも含む領域を切り出した絞り込み領域の画像をドライバ画像として表示させる構成を示したが、必ずしもこれに限らない。例えば、顔画像からドライバの眼を少なくとも含む領域を切り出した絞り込み領域の画像(図7参照)をドライバ画像として表示させる構成としてもよい。これによれば、ドライバが自身の表情を確認しやすい眼を少なくとも含む領域を拡大して表示させることが可能になるので、ドライバが自身の眠気の度合いを特に理解しやすくなる。
また、ドライバの顔のうちの眠気の兆候が検出された顔部位を少なくとも含む領域に絞り込んだ絞り込み領域の画像をドライバ画像として表示させる構成としてもよい。この構成を採用する場合には、DSM13で眠気兆候信号をHCU11へ出力する場合に、眠気の兆候を検出した顔部位の情報も出力する構成とすればよい。そして、兆候特定部114が、眠気の兆候を検出した顔部位の情報から眠気が表れている顔部位も特定する構成とすればよい。これによれば、眠気が表れている顔部位を少なくとも含む領域を拡大して表示させることが可能になるので、ドライバが自身の眠気の度合いを特に理解しやすくなる。
なお、ドライバの眼及び眉、又は眼に加え、ドライバの顔のうちの眠気の兆候が検出された顔部位を少なくとも含む領域に絞り込んだ絞り込み領域の画像をドライバ画像として表示させる構成としてもよい。他にも、ドライバの顔画像をドライバ画像として表示させる構成としてもよい。
(実施形態4)
前述の実施形態では、ドライバ状態の検出にDSM13を用いる構成を示したが、必ずしもこれに限らない。ドライバ状態の検出には、自車の舵角センサで検出する操舵角の経時変化等の車両信号を用いる構成としてもよいし、脈波センサ,心電センサ,呼吸センサ等の生体センサを用いる構成としてもよい。これに伴い、DSM13を用いて検出できるドライバ状態以外のドライバ状態を対象とする構成としてもよい。
前述の実施形態では、ドライバ状態の検出にDSM13を用いる構成を示したが、必ずしもこれに限らない。ドライバ状態の検出には、自車の舵角センサで検出する操舵角の経時変化等の車両信号を用いる構成としてもよいし、脈波センサ,心電センサ,呼吸センサ等の生体センサを用いる構成としてもよい。これに伴い、DSM13を用いて検出できるドライバ状態以外のドライバ状態を対象とする構成としてもよい。
なお、生体センサは、ステアリングホイール,運転席シート等に設けるといったように自車に設ける構成としてもよいし、ドライバが装着するウェアラブルデバイスに設けられる構成としてもよい。ドライバが装着するウェアラブルデバイスに生体センサが設けられている場合には、例えば無線通信を介して、生体センサでの検出結果をHCU11が取得する構成とすればよい。
(実施形態5)
前述の実施形態では、ドライバの顔画像から切り出した画像をドライバ画像としたり、ドライバの顔画像をドライバ画像としたりする構成を示したが、必ずしもこれに限らない。例えば、ドライバの顔画像を加工した画像をドライバ画像とする構成としてもよい。
前述の実施形態では、ドライバの顔画像から切り出した画像をドライバ画像としたり、ドライバの顔画像をドライバ画像としたりする構成を示したが、必ずしもこれに限らない。例えば、ドライバの顔画像を加工した画像をドライバ画像とする構成としてもよい。
例えば、表示制御部116が、実際よりも眠そうな表情に加工を行ってドライバ画像を表示させるといった、ドライバ状態の度合いが悪化して見える方向に表情を誇張する加工を行ってドライバ画像を表示させる構成としてもよい。一例としては、公知の手法によって、瞼が実際よりも閉じているように加工する等すればよい。これによれば、実際よりもドライバ状態が悪化して見える表情をドライバが確認することにより、ドライバが覚醒状態の改善といったドライバ状態の改善をより強く意識しやすくなるため、ドライバ状態の改善の効果が高まる。
他にも、表示制御部116が、実際よりも覚醒していそうな表情に加工を行ってドライバ画像を表示させるといった、ドライバ状態の度合いが改善して見える方向に表情を誇張する加工を行ってドライバ画像を表示させる構成としてもよい。一例としては、公知の手法によって、瞼が実際よりも開いているように加工する等すればよい。これによれば、実際よりもドライバ状態が改善して見える表情をドライバが確認することにより、ドライバが理想的なドライバ状態をより強く意識しやすくなるため、ドライバ状態の改善の効果が高まる。
また、近赤外カメラで撮像した顔画像を、可視光で撮像した画像に近づけるように加工した画像をドライバ画像に用いる構成としてもよい。
(実施形態6)
実施形態5では、ドライバの顔画像を加工した画像をドライバ画像とする構成を示したが、一部の顔部位を強調する加工を行った画像をドライバ画像とする構成としてもよい。例えば、図8に示すように、絞り込み領域に含まれる顔部位のうちのドライバの眼と眉だけを強調する加工を行った画像をドライバ画像とする構成とすればよい。他にも、ドライバ画像生成部115でドライバの顔画像をもとに、顔の特徴点を抽出したフレームモデル像を生成し、図9に示すように、このフレームモデル像の絞り込み領域に含まれる顔部位のうちのドライバの眼と眉だけを強調する加工を行った画像をドライバ画像とする構成としてもよい。なお、絞り込み領域に含まれる顔部位のうちのドライバの眼だけを強調する加工を行った画像をドライバ画像とする構成としてもよい。
実施形態5では、ドライバの顔画像を加工した画像をドライバ画像とする構成を示したが、一部の顔部位を強調する加工を行った画像をドライバ画像とする構成としてもよい。例えば、図8に示すように、絞り込み領域に含まれる顔部位のうちのドライバの眼と眉だけを強調する加工を行った画像をドライバ画像とする構成とすればよい。他にも、ドライバ画像生成部115でドライバの顔画像をもとに、顔の特徴点を抽出したフレームモデル像を生成し、図9に示すように、このフレームモデル像の絞り込み領域に含まれる顔部位のうちのドライバの眼と眉だけを強調する加工を行った画像をドライバ画像とする構成としてもよい。なお、絞り込み領域に含まれる顔部位のうちのドライバの眼だけを強調する加工を行った画像をドライバ画像とする構成としてもよい。
(実施形態7)
前述の実施形態では、DSM13の近赤外カメラで撮像した顔画像を用いてドライバ画像を生成する構成を示したが、必ずしもこれに限らない。例えば、DSM13の近赤外カメラ以外の可視光カメラで撮像した顔画像を用いてドライバ画像を生成する構成としてもよい。
前述の実施形態では、DSM13の近赤外カメラで撮像した顔画像を用いてドライバ画像を生成する構成を示したが、必ずしもこれに限らない。例えば、DSM13の近赤外カメラ以外の可視光カメラで撮像した顔画像を用いてドライバ画像を生成する構成としてもよい。
(実施形態8)
前述の実施形態では、撮像装置で撮像した顔画像からドライバ画像を切り出す構成を示したが、必ずしもこれに限らない。例えば、撮像装置で撮像する撮像範囲自体が顔の一部に絞り込まれている構成であってもよい。
前述の実施形態では、撮像装置で撮像した顔画像からドライバ画像を切り出す構成を示したが、必ずしもこれに限らない。例えば、撮像装置で撮像する撮像範囲自体が顔の一部に絞り込まれている構成であってもよい。
(実施形態9)
前述の実施形態では、ドライバ状態を改善すべきタイミングとドライバ状態が良好な度合いであるべきタイミングとでドライバ画像を表示させる構成を示したが、必ずしもこれに限らない。例えば、ドライバ状態を改善すべきタイミングとドライバ状態が良好な度合いであるべきタイミングとのうちの一方のみでドライバ画像を表示させる構成としてもよい。
前述の実施形態では、ドライバ状態を改善すべきタイミングとドライバ状態が良好な度合いであるべきタイミングとでドライバ画像を表示させる構成を示したが、必ずしもこれに限らない。例えば、ドライバ状態を改善すべきタイミングとドライバ状態が良好な度合いであるべきタイミングとのうちの一方のみでドライバ画像を表示させる構成としてもよい。
(実施形態10)
前述の実施形態では、ドライバ状態が良好な度合いであるべきタイミングとして、自動運転から手動運転に運転交代する場合を例に挙げたが、必ずしもこれに限らない。例えば、ドライバが運転操作に集中すべき地点への接近時を、ドライバ状態が良好な度合いであるべきタイミングとしてもよい。一例としては、手動運転時において見通しの悪い交差点や事故多発地点といった注意地点までの距離が設定距離以下となった場合に、タイミング検出部112が対象タイミングを検出する構成とすればよい。注意地点については、地図データから特定する構成としてもよいし、通信機20を介して取得する交通情報から特定する構成としてもよい。
前述の実施形態では、ドライバ状態が良好な度合いであるべきタイミングとして、自動運転から手動運転に運転交代する場合を例に挙げたが、必ずしもこれに限らない。例えば、ドライバが運転操作に集中すべき地点への接近時を、ドライバ状態が良好な度合いであるべきタイミングとしてもよい。一例としては、手動運転時において見通しの悪い交差点や事故多発地点といった注意地点までの距離が設定距離以下となった場合に、タイミング検出部112が対象タイミングを検出する構成とすればよい。注意地点については、地図データから特定する構成としてもよいし、通信機20を介して取得する交通情報から特定する構成としてもよい。
なお、自動運転が可能であることを必須としない構成では、運転支援システム1にADASロケータ30や周辺監視センサ50や自動運転ECU60を含まない構成としてもよい。
(実施形態11)
前述の実施形態では、ドライバの顔画像を撮像する撮像装置が運転席に着座したドライバを正面から撮像できる場合を例に挙げて説明を行ったが、必ずしもこれに限らない。例えば、ドライバの顔画像を撮像する撮像装置が、インストルメントパネルのセンタクラスタやセンタコンソールに設けられている場合には、以下のようにすればよい。
前述の実施形態では、ドライバの顔画像を撮像する撮像装置が運転席に着座したドライバを正面から撮像できる場合を例に挙げて説明を行ったが、必ずしもこれに限らない。例えば、ドライバの顔画像を撮像する撮像装置が、インストルメントパネルのセンタクラスタやセンタコンソールに設けられている場合には、以下のようにすればよい。
一例として、ドライバの顔がこの撮像装置に向いたときに撮像した顔画像に基づいてドライバ画像を生成する構成とすればよい。他の例としては、撮像装置としてライトフィールドカメラ等の深度カメラを用いる構成としてもよい。この場合には、深度カメラで撮像した車両中心線側のドライバの半分の顔の3Dモデルを生成した後、もう半分の顔を補完して顔全体の3Dモデルを生成し、3Dモデルの正面視画像をドライバ画像として表示させる構成とすればよい。
なお、本発明は、上述した実施形態及び変形例に限定されるものではなく、請求項に示した範囲で種々の変更が可能であり、異なる実施形態及び変形例にそれぞれ開示された技術的手段を適宜組み合わせて得られる実施形態についても本発明の技術的範囲に含まれる。
1 運転支援システム、10 HMIシステム、11 HCU(車両用表示制御装置)、12 操作デバイス、13 DSM(撮像装置)、14 表示装置、15 音声出力装置、20 通信機、30 ADASロケータ、31 GNSS受信機、32 慣性センサ、33 地図DB、40 車両制御ECU、50 周辺監視センサ、60 自動運転ECU(運転交代制御装置)、111 状態特定部、112 タイミング検出部、113 顔画像取得部、114 兆候特定部、115 ドライバ画像生成部、116 表示制御部
Claims (12)
- 車両で用いられる表示装置(14)を制御する車両用表示制御装置であって、
前記車両のドライバの顔部位を少なくとも撮像する撮像装置(13)で撮像された画像に基づく、前記顔部位を少なくとも含むドライバ画像を前記表示装置に表示させる表示制御部(116)と、
前記ドライバの身体状態及び心理状態のいずれかであるドライバ状態を改善すべきタイミング、及び前記ドライバ状態が良好な度合いであるべきタイミングのいずれかである対象タイミングを検出するタイミング検出部(112)とを備え、
前記表示制御部は、前記タイミング検出部で前記対象タイミングを検出した場合に、前記ドライバ画像を表示させる車両用表示制御装置。 - 請求項1において、
前記ドライバ状態の度合いを特定する状態特定部(111)を備え、
前記タイミング検出部は、前記状態特定部で特定した前記ドライバ状態が閾値以上に悪化した度合いである場合に、前記ドライバ状態を改善すべきタイミングとして前記対象タイミングを検出する車両用表示制御装置。 - 請求項1又は2において、
前記車両は、前記ドライバに代わって運転操作を実施する自動運転と前記ドライバによる手動運転との間での運転交代を制御する運転交代制御装置(60)を備える車両であって、
前記タイミング検出部は、前記運転交代制御装置で前記自動運転から前記手動運転に運転交代させる場合に、前記ドライバ状態が良好な度合いであるべきタイミングとして前記対象タイミングを検出する車両用表示制御装置。 - 請求項3において、
前記表示制御部は、前記運転交代制御装置で前記自動運転から前記手動運転に運転交代させる場合を前記タイミング検出部で前記対象タイミングとして検出して前記ドライバ画像を表示させた後は、この運転交代が完了した場合に前記ドライバ画像の表示を終了させる車両用表示制御装置。 - 請求項1〜4のいずれか1項において、
前記ドライバ状態の度合いを特定する状態特定部(111)を備えるものであって、
前記表示制御部は、前記撮像装置で撮像された直近の過去一定時間の画像のうち、前記状態特定部で特定した前記ドライバ状態の度合いが最も悪化していた時点に対応する画像に基づく前記ドライバ画像を表示させる車両用表示制御装置。 - 請求項1〜4のいずれか1項において、
前記ドライバ状態の悪化の兆候を特定する兆候特定部(114)を備え、
前記表示制御部は、前記撮像装置で撮像された画像のうち、前記兆候特定部で前記ドライバ状態の悪化の兆候を特定した時点に対応する画像に基づく前記ドライバ画像を表示させる車両用表示制御装置。 - 請求項1〜6のいずれか1項において、
前記表示制御部は、前記ドライバの顔のうちの眼と眉とを少なくとも含む領域に絞り込んだ絞り込み領域の画像を前記ドライバ画像として表示させる車両用表示制御装置。 - 請求項1〜6のいずれか1項において、
前記表示制御部は、前記ドライバの顔のうちの眼を少なくとも含む領域に絞り込んだ絞り込み領域の画像を前記ドライバ画像として表示させる車両用表示制御装置。 - 請求項1〜6のいずれか1項において、
前記ドライバ状態の悪化の兆候として、前記ドライバ状態の悪化の兆候が表れている顔部位を特定する兆候特定部(114)を備えるものであって、
前記表示制御部は、前記ドライバの顔のうちの前記兆候特定部で特定した顔部位を少なくとも含む領域に絞り込んだ絞り込み領域の画像を前記ドライバ画像として表示させる車両用表示制御装置。 - 請求項7〜9のいずれか1項において、
前記表示制御部は、前記車両のドライバの顔全体を少なくとも撮像する前記撮像装置で撮像された顔画像から切り出した前記絞り込み領域の画像を前記ドライバ画像として表示させる車両用表示制御装置。 - 請求項1〜10のいずれか1項において、
前記表示制御部は、前記ドライバ状態の度合いが悪化して見える方向に表情を誇張する加工を行って前記ドライバ画像を表示させる車両用表示制御装置。 - 請求項1〜10のいずれか1項において、
前記表示制御部は、前記ドライバ状態の度合いが改善して見える方向に表情を誇張する加工を行って前記ドライバ画像を表示させる車両用表示制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017033825A JP2018139070A (ja) | 2017-02-24 | 2017-02-24 | 車両用表示制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017033825A JP2018139070A (ja) | 2017-02-24 | 2017-02-24 | 車両用表示制御装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2018139070A true JP2018139070A (ja) | 2018-09-06 |
Family
ID=63451149
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017033825A Pending JP2018139070A (ja) | 2017-02-24 | 2017-02-24 | 車両用表示制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2018139070A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109982052A (zh) * | 2019-05-06 | 2019-07-05 | 深圳市瑞联高科通讯有限公司 | 带视频输出的隐藏式防疲劳监控器 |
| JP2020014643A (ja) * | 2018-07-25 | 2020-01-30 | 株式会社ニューギン | 遊技機 |
| CN111403030A (zh) * | 2020-02-27 | 2020-07-10 | 广汽蔚来新能源汽车科技有限公司 | 心理健康监测方法、装置、计算机设备和存储介质 |
| WO2021199318A1 (ja) * | 2020-03-31 | 2021-10-07 | 本田技研工業株式会社 | 画像処理装置、車両、画像処理方法およびプログラム |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007111247A (ja) * | 2005-10-20 | 2007-05-10 | Nissan Motor Co Ltd | 運転者状態表示装置、および運転者状態表示方法 |
| WO2014054293A1 (ja) * | 2012-10-05 | 2014-04-10 | パナソニック株式会社 | 眠気推定装置、眠気推定方法、コンピュータ読み取り可能な非一時的な記録媒体 |
| JP2015073795A (ja) * | 2013-10-10 | 2015-04-20 | 株式会社デンソー | 疲労計測装置 |
-
2017
- 2017-02-24 JP JP2017033825A patent/JP2018139070A/ja active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007111247A (ja) * | 2005-10-20 | 2007-05-10 | Nissan Motor Co Ltd | 運転者状態表示装置、および運転者状態表示方法 |
| WO2014054293A1 (ja) * | 2012-10-05 | 2014-04-10 | パナソニック株式会社 | 眠気推定装置、眠気推定方法、コンピュータ読み取り可能な非一時的な記録媒体 |
| JP2015073795A (ja) * | 2013-10-10 | 2015-04-20 | 株式会社デンソー | 疲労計測装置 |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020014643A (ja) * | 2018-07-25 | 2020-01-30 | 株式会社ニューギン | 遊技機 |
| CN109982052A (zh) * | 2019-05-06 | 2019-07-05 | 深圳市瑞联高科通讯有限公司 | 带视频输出的隐藏式防疲劳监控器 |
| CN111403030A (zh) * | 2020-02-27 | 2020-07-10 | 广汽蔚来新能源汽车科技有限公司 | 心理健康监测方法、装置、计算机设备和存储介质 |
| CN111403030B (zh) * | 2020-02-27 | 2024-02-02 | 合创汽车科技有限公司 | 心理健康监测方法、装置、计算机设备和存储介质 |
| WO2021199318A1 (ja) * | 2020-03-31 | 2021-10-07 | 本田技研工業株式会社 | 画像処理装置、車両、画像処理方法およびプログラム |
| JPWO2021199318A1 (ja) * | 2020-03-31 | 2021-10-07 | ||
| JP7274045B2 (ja) | 2020-03-31 | 2023-05-15 | 本田技研工業株式会社 | 画像処理装置、車両、画像処理方法およびプログラム |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7249914B2 (ja) | 走行制御装置及び車載システム | |
| JP7080598B2 (ja) | 車両制御装置および車両制御方法 | |
| CN111361552B (zh) | 自动驾驶系统 | |
| JP6342856B2 (ja) | 車両制御装置 | |
| WO2018186127A1 (ja) | 走行支援装置 | |
| EP3882884A1 (en) | Information processing device, information processing method, and program | |
| EP3540711B1 (en) | Method for assisting operation of an ego-vehicle, method for assisting other traffic participants and corresponding assistance systems and vehicles | |
| JP6662080B2 (ja) | ドライバ状態判定装置 | |
| CN110192084B (zh) | 自动驾驶辅助装置、方法及程序 | |
| JP6565408B2 (ja) | 車両制御装置及び車両制御方法 | |
| JP2018139070A (ja) | 車両用表示制御装置 | |
| JP2017228280A (ja) | 覚醒維持装置 | |
| CN110544368B (zh) | 一种疲劳驾驶增强现实预警装置及预警方法 | |
| WO2018163472A1 (ja) | モード切替制御装置、モード切替制御システム、モード切替制御方法およびプログラム | |
| JP2019001314A (ja) | 走行支援装置及び制御プログラム | |
| CN109987090A (zh) | 驾驶辅助系统和方法 | |
| WO2019193715A1 (ja) | 運転支援装置 | |
| JP7176187B2 (ja) | 走行支援方法及び走行支援装置 | |
| JP6471707B2 (ja) | 運転教示装置 | |
| JP2019079096A (ja) | 状態改善装置、状態改善方法、及び制御プログラム | |
| WO2023058494A1 (ja) | 車両用制御装置及び車両用制御方法 | |
| JP2023055197A (ja) | 車両用制御装置及び車両用制御方法 | |
| CN116895179A (zh) | 交通安全辅助系统 | |
| WO2020179112A1 (ja) | リスク取得システム、リスク表示システムおよびリスク取得プログラム | |
| CN116895176A (zh) | 交通安全辅助系统 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190423 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200312 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200317 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20201006 |