JP2018132913A - 構造物可視化装置及び構造物可視化システム - Google Patents
構造物可視化装置及び構造物可視化システム Download PDFInfo
- Publication number
- JP2018132913A JP2018132913A JP2017025541A JP2017025541A JP2018132913A JP 2018132913 A JP2018132913 A JP 2018132913A JP 2017025541 A JP2017025541 A JP 2017025541A JP 2017025541 A JP2017025541 A JP 2017025541A JP 2018132913 A JP2018132913 A JP 2018132913A
- Authority
- JP
- Japan
- Prior art keywords
- information
- current position
- unit
- gnss
- positioning unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Landscapes
- Position Fixing By Use Of Radio Waves (AREA)
- Processing Or Creating Images (AREA)
Abstract
Description
10 移動局
11 入出力部
12 制御部
13,33,43 測位部
14,31 構造物合成情報保持部
20 基地局
21 サーバ
30 画像サーバ
40 測位サーバ
100,100´ 構造物可視化システム
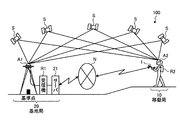
A1,A2 GNSSアンテナ
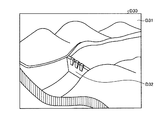
D1〜D3,D30 構造物合成画像
D11,D12,D13,D31 景観背景画像
D21,D22,D23,D32 構造物画像
E1〜E3 領域
N ネットワーク
P1 構造物
P2 現在位置
R1,R2,R2´ 受信機
S GNSS衛星
Ω1〜Ω3 立体角
Claims (9)
- 構造物が配置される場所を含む景観画像情報と前記構造物を示す構造物画像情報とを合成した構造物合成情報を、前記構造物に対する複数の方向に対応して予め複数作成して保持する構造物合成情報保持部と、
現在位置を測位する測位部と、
前記測位部で測位された現在位置と前記構造物の位置とを照合し、前記複数の構造物合成情報の中から、前記現在位置から前記構造物に対する方向に対応する構造物合成情報を選択し、前記現在位置から前記構造物までの距離をもとに、選択された構造物合成情報の縮尺を調整して表示部に表示する制御部と、
を備えたことを特徴とする構造物可視化装置。 - 前記構造物画像情報は、3次元の情報であることを特徴とする請求項1に記載の構造物可視化装置。
- 前記複数の方向は、前記構造物からの複数の立体角で分割された領域に対応するものであることを特徴とする請求項1または2に記載の構造物可視化装置。
- 各構造物合成情報は、前記構造物の完成に至るまでの時系列情報を含むことを特徴とする請求項1〜3のいずれか一つに記載の構造物可視化装置。
- 構造物が配置される場所を含む景観画像情報と前記構造物を示す構造物画像情報とを合成した構造物合成情報を、前記構造物に対する複数の方向に対応して予め複数作成して保持する構造物合成情報保持部と、
GNSSアンテナを介して現在位置におけるGNSS観測情報を受信するとともに、基地局の基準点におけるGNSS補正観測情報を取得して前記GNSS観測情報と前記GNSS補正観測情報とをもとに現在位置を計算する測位部が内蔵された受信機と、
ネットワークを介して前記基地局から前記GNSS補正観測情報を取得して前記受信機に出力するとともに、前記測位部で計算された現在位置と前記構造物の位置とを照合し、前記複数の構造物合成情報の中から、前記現在位置から前記構造物に対する方向に対応する構造物合成情報を選択し、前記現在位置から前記構造物までの距離をもとに、選択された構造物合成情報の縮尺を調整して表示部に表示する制御部を備えたタブレット端末と、
を備えたことを特徴とする構造物可視化システム。 - 前記構造物合成情報保持部は、前記ネットワークを介して前記タブレット端末に接続されることを特徴とする請求項5に記載の構造物可視化システム。
- 前記測位部は、前記ネットワークを介して前記タブレット端末に接続されることを特徴とする請求項5または6に記載の構造物可視化システム。
- 前記受信機は、携帯型であり、
前記受信機のGNSSアンテナは、ウェアラブル装置であることを特徴とする請求項5〜7のいずれか一つに記載の構造物可視化システム。 - 前記測位部は、干渉測位方式によって現在位置を計算することを特徴とする請求項5〜8のいずれか一つに記載の構造物可視化システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017025541A JP6914049B2 (ja) | 2017-02-15 | 2017-02-15 | 構造物可視化装置及び構造物可視化システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017025541A JP6914049B2 (ja) | 2017-02-15 | 2017-02-15 | 構造物可視化装置及び構造物可視化システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018132913A true JP2018132913A (ja) | 2018-08-23 |
| JP6914049B2 JP6914049B2 (ja) | 2021-08-04 |
Family
ID=63247481
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017025541A Active JP6914049B2 (ja) | 2017-02-15 | 2017-02-15 | 構造物可視化装置及び構造物可視化システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6914049B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10870236B2 (en) | 2017-12-14 | 2020-12-22 | Xyzprinting, Inc. | Printing module and three dimensional printing apparatus |
Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05242204A (ja) * | 1992-02-27 | 1993-09-21 | Sekisui House Ltd | 建造物及びその周辺の仮想完成画像の作成表示方法 |
| JPH07200650A (ja) * | 1993-12-29 | 1995-08-04 | Matsushita Electric Ind Co Ltd | 建造物画像合成装置 |
| JP2002183764A (ja) * | 2000-12-18 | 2002-06-28 | Wall:Kk | 三次元都市データベースのメンテナンス方法及びそのためのサーバ |
| JP2004334282A (ja) * | 2003-04-30 | 2004-11-25 | Misawa Homes Co Ltd | 画像合成装置および画像合成方法 |
| JP2008078908A (ja) * | 2006-09-20 | 2008-04-03 | Casio Comput Co Ltd | 撮像装置、撮像方法及びプログラム |
| JP2010282657A (ja) * | 2010-09-09 | 2010-12-16 | Mitsubishi Electric Corp | 配信装置及び情報配信システム |
| JP2014089697A (ja) * | 2012-10-05 | 2014-05-15 | Fine Co Ltd | 建築画像表示装置、建築画像表示方法及びコンピュータプログラム |
| JP2016053961A (ja) * | 2015-09-28 | 2016-04-14 | 国土交通省国土技術政策総合研究所長 | 情報処理装置、情報処理方法及びプログラム |
| JP2016070716A (ja) * | 2014-09-29 | 2016-05-09 | 三菱電機株式会社 | 情報表示制御システムおよび情報表示制御方法 |
| JP2016103263A (ja) * | 2015-08-31 | 2016-06-02 | 株式会社大林組 | 構造物状況把握支援装置、構造物状況把握支援方法及びプログラム |
| WO2016111067A1 (ja) * | 2015-01-05 | 2016-07-14 | ソニー株式会社 | 情報処理装置、情報処理方法、およびプログラム |
-
2017
- 2017-02-15 JP JP2017025541A patent/JP6914049B2/ja active Active
Patent Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05242204A (ja) * | 1992-02-27 | 1993-09-21 | Sekisui House Ltd | 建造物及びその周辺の仮想完成画像の作成表示方法 |
| JPH07200650A (ja) * | 1993-12-29 | 1995-08-04 | Matsushita Electric Ind Co Ltd | 建造物画像合成装置 |
| JP2002183764A (ja) * | 2000-12-18 | 2002-06-28 | Wall:Kk | 三次元都市データベースのメンテナンス方法及びそのためのサーバ |
| JP2004334282A (ja) * | 2003-04-30 | 2004-11-25 | Misawa Homes Co Ltd | 画像合成装置および画像合成方法 |
| JP2008078908A (ja) * | 2006-09-20 | 2008-04-03 | Casio Comput Co Ltd | 撮像装置、撮像方法及びプログラム |
| JP2010282657A (ja) * | 2010-09-09 | 2010-12-16 | Mitsubishi Electric Corp | 配信装置及び情報配信システム |
| JP2014089697A (ja) * | 2012-10-05 | 2014-05-15 | Fine Co Ltd | 建築画像表示装置、建築画像表示方法及びコンピュータプログラム |
| JP2016070716A (ja) * | 2014-09-29 | 2016-05-09 | 三菱電機株式会社 | 情報表示制御システムおよび情報表示制御方法 |
| WO2016111067A1 (ja) * | 2015-01-05 | 2016-07-14 | ソニー株式会社 | 情報処理装置、情報処理方法、およびプログラム |
| JP2016103263A (ja) * | 2015-08-31 | 2016-06-02 | 株式会社大林組 | 構造物状況把握支援装置、構造物状況把握支援方法及びプログラム |
| JP2016053961A (ja) * | 2015-09-28 | 2016-04-14 | 国土交通省国土技術政策総合研究所長 | 情報処理装置、情報処理方法及びプログラム |
Non-Patent Citations (1)
| Title |
|---|
| 株式会社テクノシステム: "干渉測位方式とは何ですか?", [ONLINE], JPN7020004175, 7 November 2009 (2009-11-07), ISSN: 0004417104 * |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10870236B2 (en) | 2017-12-14 | 2020-12-22 | Xyzprinting, Inc. | Printing module and three dimensional printing apparatus |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6914049B2 (ja) | 2021-08-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9429438B2 (en) | Updating map data from camera images | |
| JP5736526B2 (ja) | 電子マップに基づく位置検索方法及び装置 | |
| EP2583446B1 (en) | User interface transition between camera view and map view | |
| KR101285360B1 (ko) | 증강현실을 이용한 관심 지점 표시 장치 및 방법 | |
| CA2762743C (en) | Updating map data from camera images | |
| US7925434B2 (en) | Image-related information displaying system | |
| JP6192938B2 (ja) | 三次元合成処理システムおよび三次元合成処理方法 | |
| CN104236522A (zh) | 三维可视化测量系统 | |
| KR101744956B1 (ko) | 모바일 단말을 이용한 gnss 측량 시스템 및 방법 | |
| Gomez-Jauregui et al. | Quantitative evaluation of overlaying discrepancies in mobile augmented reality applications for AEC/FM | |
| JP2019212225A (ja) | 端末装置および端末装置の制御方法 | |
| CN116086411B (zh) | 数字地形图生成方法、装置、设备和可读存储介质 | |
| JP2011232444A (ja) | 座標変換装置、座標変換方法及びプログラム | |
| KR100469801B1 (ko) | 실시간 항측 기준점 측량시스템 및 방법 | |
| JP2005266627A (ja) | 電子地図情報の補正方法及び移動局位置監視システム | |
| JP6914049B2 (ja) | 構造物可視化装置及び構造物可視化システム | |
| EP3132279B1 (en) | A target determining method and system | |
| JP2012242322A (ja) | 空中物位置測定装置、空中物位置測定システム及び空中物位置測定方法 | |
| JP5813181B1 (ja) | 衛星測位地図表示システム | |
| KR101469077B1 (ko) | 현지조사자료를 활용한 수치지도 업데이트 시스템 | |
| KR20140053622A (ko) | 이동 단말기를 이용한 gps 측정 시스템 | |
| CN110517347A (zh) | 一种建设工程数据模型环境可视化方法及其装置和应用 | |
| JP2017083423A (ja) | 移動局及びこれを用いた埋設物可視化システム | |
| JP2006322832A (ja) | 通信端末、輪郭情報管理サーバ、情報提供システム、及び、情報提供方法 | |
| Hammad | Distributed augmented reality for visualising collaborative construction tasks |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20191223 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210105 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210308 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210525 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210615 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210706 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210713 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6914049 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |