JP2017227307A - シフトレンジ切替装置 - Google Patents
シフトレンジ切替装置 Download PDFInfo
- Publication number
- JP2017227307A JP2017227307A JP2016125342A JP2016125342A JP2017227307A JP 2017227307 A JP2017227307 A JP 2017227307A JP 2016125342 A JP2016125342 A JP 2016125342A JP 2016125342 A JP2016125342 A JP 2016125342A JP 2017227307 A JP2017227307 A JP 2017227307A
- Authority
- JP
- Japan
- Prior art keywords
- motor
- target
- control
- output shaft
- valley
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000001514 detection method Methods 0.000 claims description 6
- 238000000034 method Methods 0.000 description 41
- 230000008569 process Effects 0.000 description 38
- 230000005526 G1 to G0 transition Effects 0.000 description 25
- 239000003638 chemical reducing agent Substances 0.000 description 16
- 230000007246 mechanism Effects 0.000 description 15
- 101100118976 Mus musculus Clint1 gene Proteins 0.000 description 8
- 238000004804 winding Methods 0.000 description 8
- 230000008859 change Effects 0.000 description 4
- 230000033001 locomotion Effects 0.000 description 4
- 101100187346 Aspergillus sp. (strain MF297-2) notP gene Proteins 0.000 description 3
- 230000006399 behavior Effects 0.000 description 3
- 238000010586 diagram Methods 0.000 description 3
- 230000005284 excitation Effects 0.000 description 3
- 230000007274 generation of a signal involved in cell-cell signaling Effects 0.000 description 2
- 230000009467 reduction Effects 0.000 description 2
- 238000013459 approach Methods 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000005611 electricity Effects 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000004043 responsiveness Effects 0.000 description 1
- 238000010187 selection method Methods 0.000 description 1
- 239000013589 supplement Substances 0.000 description 1
Images











Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/12—Detecting malfunction or potential malfunction, e.g. fail safe; Circumventing or fixing failures
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T1/00—Arrangements of braking elements, i.e. of those parts where braking effect occurs specially for vehicles
- B60T1/02—Arrangements of braking elements, i.e. of those parts where braking effect occurs specially for vehicles acting by retarding wheels
- B60T1/06—Arrangements of braking elements, i.e. of those parts where braking effect occurs specially for vehicles acting by retarding wheels acting otherwise than on tread, e.g. employing rim, drum, disc, or transmission or on double wheels
- B60T1/062—Arrangements of braking elements, i.e. of those parts where braking effect occurs specially for vehicles acting by retarding wheels acting otherwise than on tread, e.g. employing rim, drum, disc, or transmission or on double wheels acting on transmission parts
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T1/00—Arrangements of braking elements, i.e. of those parts where braking effect occurs specially for vehicles
- B60T1/005—Arrangements of braking elements, i.e. of those parts where braking effect occurs specially for vehicles by locking of wheel or transmission rotation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T1/00—Arrangements of braking elements, i.e. of those parts where braking effect occurs specially for vehicles
- B60T1/02—Arrangements of braking elements, i.e. of those parts where braking effect occurs specially for vehicles acting by retarding wheels
- B60T1/06—Arrangements of braking elements, i.e. of those parts where braking effect occurs specially for vehicles acting by retarding wheels acting otherwise than on tread, e.g. employing rim, drum, disc, or transmission or on double wheels
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H59/00—Control inputs to control units of change-speed-, or reversing-gearings for conveying rotary motion
- F16H59/02—Selector apparatus
- F16H59/08—Range selector apparatus
- F16H59/10—Range selector apparatus comprising levers
- F16H59/105—Range selector apparatus comprising levers consisting of electrical switches or sensors
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/26—Generation or transmission of movements for final actuating mechanisms
- F16H61/28—Generation or transmission of movements for final actuating mechanisms with at least one movement of the final actuating mechanism being caused by a non-mechanical force, e.g. power-assisted
- F16H61/32—Electric motors actuators or related electrical control means therefor
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H63/00—Control outputs from the control unit to change-speed- or reversing-gearings for conveying rotary motion or to other devices than the final output mechanism
- F16H63/02—Final output mechanisms therefor; Actuating means for the final output mechanisms
- F16H63/30—Constructional features of the final output mechanisms
- F16H63/34—Locking or disabling mechanisms
- F16H63/3416—Parking lock mechanisms or brakes in the transmission
- F16H63/3458—Parking lock mechanisms or brakes in the transmission with electric actuating means, e.g. shift by wire
- F16H63/3466—Parking lock mechanisms or brakes in the transmission with electric actuating means, e.g. shift by wire using electric motors
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P23/00—Arrangements or methods for the control of AC motors characterised by a control method other than vector control
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P23/00—Arrangements or methods for the control of AC motors characterised by a control method other than vector control
- H02P23/0004—Control strategies in general, e.g. linear type, e.g. P, PI, PID, using robust control
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/26—Generation or transmission of movements for final actuating mechanisms
- F16H61/28—Generation or transmission of movements for final actuating mechanisms with at least one movement of the final actuating mechanism being caused by a non-mechanical force, e.g. power-assisted
- F16H2061/283—Adjustment or calibration of actuator positions, e.g. neutral position
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/26—Generation or transmission of movements for final actuating mechanisms
- F16H61/28—Generation or transmission of movements for final actuating mechanisms with at least one movement of the final actuating mechanism being caused by a non-mechanical force, e.g. power-assisted
- F16H61/32—Electric motors actuators or related electrical control means therefor
- F16H2061/326—Actuators for range selection, i.e. actuators for controlling the range selector or the manual range valve in the transmission
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Transportation (AREA)
- Power Engineering (AREA)
- Gear-Shifting Mechanisms (AREA)
- Control Of Ac Motors In General (AREA)
Abstract
Description
一方、SRモータに替えて、例えばDCモータのようにコギングトルクが生じるモータを用いる場合、モータへの通電をオフにしても、コギングトルクの影響により、係合部が谷部の中心からずれた箇所で停止する虞がある。
本発明は、上述の課題に鑑みてなされたものであり、その目的は、シフトレンジを適切に切り替え可能であるシフトレンジ切替装置を提供することにある。
出力軸には、モータの駆動力が伝達される。モータの回転軸であるモータ軸(105)と出力軸との間には、遊びが形成されている。
谷部形成部材は、シフトレンジに応じた谷部(211〜214)が形成され、出力軸と一体に回転する。
係合部材は、付勢部材の付勢力により谷部に嵌まり込む方向に付勢されており、目標シフトレンジに応じた谷部である目標谷部に嵌まり合う。
モータ制御装置は、モータの駆動を制御する。
第2の発明では、モータ制御部は、モータがモータ目標位置を含む制御誤差の範囲内にて停止した後、モータが停止する前の回転方向とは反対方向にモータを駆動する反転制御を行う。
これにより、モータとして、例えばDCモータ等のコギングトルクが生じるものを用いた場合であっても、付勢部材の付勢力により、係合部材を目標谷部の中心に嵌め込むことができる。したがって、シフトレンジを適切に切り替え可能である。
(第1実施形態)
本発明の第1実施形態を図1〜図8に基づいて説明する。
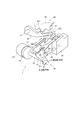
図1および図2に示すように、シフトレンジ切替装置としてのシフトバイワイヤシステム1は、モータ10、シフトレンジ切替機構20、パーキングロック機構30、および、シフトレンジ制御装置40等を備える。
減速機14は、モータ10の回転軸であるモータ軸105(図7等参照)と出力軸15との間に設けられ、モータ10の回転を減速して出力軸15に出力する。これにより、モータ10の回転がシフトレンジ切替機構20に伝達される。出力軸15には、出力軸15の角度を検出する出力軸センサ16が設けられる。出力軸センサ16は、例えばポテンショメータである。
ディテントプレート21には、出力軸15と平行に突出するピン24が設けられる。ピン24は、マニュアルバルブ28と接続される。ディテントプレート21がモータ10によって駆動されることで、マニュアルバルブ28は軸方向に往復移動する。すなわち、シフトレンジ切替機構20は、モータ10の回転運動を直線運動に変換してマニュアルバルブ28に伝達する。マニュアルバルブ28は、バルブボディ29に設けられる。マニュアルバルブ28が軸方向に往復移動することで、図示しない油圧クラッチへの油圧供給路が切り替えられ、油圧クラッチの係合状態が切り替わることでシフトレンジが変更される。
ディテントスプリング25は、弾性変形可能な板状部材であり、係合部材としてのディテントローラ26が先端に設けられる。ディテントローラ26は、谷部211〜214のいずれかに嵌まり込む。
ディテントスプリング25は、ディテントローラ26をディテントプレート21の回動中心側に付勢する。ディテントプレート21に所定以上の回転力が加わると、ディテントスプリング25が弾性変形し、ディテントローラ26が谷部211〜214を移動する。ディテントローラ26が谷部211〜214のいずれかに嵌まり込むことで、ディテントプレート21の揺動が規制され、マニュアルバルブ28の軸方向位置、および、パーキングロック機構30の状態が決定され、自動変速機5のシフトレンジが固定される。
パーキングロッド31は、略L字形状に形成され、一端311側がディテントプレート21に固定される。パーキングロッド31の他端312側には、円錐体32が設けられる。円錐体32は、他端312側にいくほど縮径するように形成される。ディテントプレート21が逆回転方向に揺動すると、円錐体32が矢印Pの方向に移動する。
モータドライバ41は、第1巻線組11の通電を切り替える3相インバータであって、スイッチング素子411〜416がブリッジ接続される。対になるU相のスイッチング素子411、414の接続点には、U1コイル111の一端が接続される。対になるV相のスイッチング素子412、415の接続点には、V1コイル112の一端が接続される。対になるW相のスイッチング素子413、416の接続点には、W1コイル113の一端が接続される。コイル111〜113の他端は、結線部115で結線される。
本実施形態のスイッチング素子411〜416、421〜426は、MOSFETであるが、IGBT等の他の素子を用いてもよい。
目標カウント設定部53は、目標シフトレンジに応じたモータ10の目標カウント値TCenを設定する。目標カウント値TCenの設定の詳細については後述する。
位相進みフィルタ55は、実カウント値Cenの位相を進ませる位相進み補償を行い、位相進み値Cen_plを演算する。位相進みフィルタ処理を行った位相進み値Cen_plについても、「実角度」の概念に含まれるものとする。
減算器56は、目標カウント値TCenと位相進み値Cen_plとの偏差ΔCenを演算する。
切替制御部65は、目標シフトレンジが変化した場合、モータ10の制御状態を位置フィードバック制御とする。切替制御部65は、目標カウント値TCenと実カウント値Cenとの差の絶対値が角度判定閾値ENth以下となった場合、固定相通電制御に切り替える。切替制御部65は、固定相通電制御に切り替わってから、通電継続時間Taが経過するまでの期間は、固定相通電制御を継続し、通電継続時間Ta経過後、通電オフ制御とする。通電オフ制御では、スイッチング素子411〜416、421〜426を全てオフにする。本実施形態では、目標カウント値TCenと実カウント値Cenとの差の絶対値が、「目標角度と実角度との差分値」に対応する。
図6および図7の(a)〜(c)は、モータ10の回転軸であるモータ軸105、出力軸15、ディテントプレート21、および、ディテントローラ26の関係を概念的に示す模式図であって、モータ10の回転方向を紙面左右方向として説明する。また上述の通り、実際にはモータ10の回転により、出力軸15およびディテントプレート21が回転することで、ディテントローラ26が移動するが、ここでは、説明を簡略化するため、モータ10の駆動により、ディテントローラ26が移動するものとして説明する。
図6および図7では、出力軸15と減速機14とが一体となっており、モータ軸105が減速機14の遊びの範囲で移動可能であるものとして記載しているが、モータ軸105と減速機14とが一体となっており、減速機14と出力軸15との間に遊びが存在しているように構成しても差し支えない。
後述の図9も同様である。
モータ10は、ECU50により、モータ目標位置で停止するように制御される。モータ10の停止位置は、各種誤差等の影響により、モータ停止位置から制御誤差の範囲内でズレが生じる。図6および図7では、(a)はモータ10がモータ目標位置にて停止した場合、(b)はモータ10がモータ目標位置より駆動方向における手前側にて停止した場合、(c)はモータ10がモータ目標位置を超えて停止した場合の例である。
また、図6(b)に示すように、モータ10がモータ目標位置より駆動方向手前側にて停止した場合、ディテントローラ26は、目標位置よりも手前側に位置する。ここで、遊びDgが位置制御幅Dsより大きいので、矢印Y2で示すように、ディテントスプリング25の付勢力により、出力軸15およびディテントプレート21が遊びDgの範囲内にて回転し、ディテントローラ26は谷部212の中心に移動して停止する。このとき、モータ軸105と減速機14とは、離間する。なお、図6(b)では、モータ停止時のディテントローラ26等を二点鎖線で示し、ディテントスプリング25の付勢力による移動後のディテントローラ26等を実線で示した。図7(a)、(b)も同様である。
したがって、ディテントローラ26を目標谷部の中心よりも駆動方向の手前側となるようにモータ10を制御することで、モータ10が制御誤差範囲内のいずれの箇所にて停止した場合であっても、ディテントローラ26を目標谷部の中心に嵌め込むことができる。
θp=θ1 ・・・(1)
θr=θ1+θ2 ・・・(2)
θn=θ1+θ2+θ3 ・・・(3)
θd=θ1+θ2+θ3+θ4 ・・・(4)
TCen_b=TCen_a+Cx ・・・(5)
TCen=TCen_b+Cy ・・・(6−1)
TCen=TCen_b−Cy ・・・(6−2)
すなわち本実施形態では、モータ10の回転方向が正方向である場合、シフト値Cyを減算し、負方向である場合、シフト値Cyを加算することで、駆動方向における手前側にてモータ10を停止させるように制御している。
出力軸15には、モータ10の駆動力が伝達される。モータ10の回転軸であるモータ軸105と出力軸15との間に遊びDgが形成されている。
ディテントプレート21は、シフトレンジに応じた谷部211〜214が形成され、出力軸15と一体に回転する。
ディテントローラ26は、ディテントスプリング25の付勢力により谷部211〜214に嵌まり込む方向に付勢されており、目標シフトレンジに応じた谷部211〜214である目標谷部に嵌まり合う。
ECU50は、ディテントローラ26が目標谷部の中心より駆動方向における手前側に所定量ずれた位置となるように、モータ目標位置を決定する。本実施形態では、ディテントローラ26の位置制御幅Dsの1/2が「所定量」である。
本発明の第2実施形態を図9〜図12に基づいて説明する。
本実施形態では、モータ制御処理が上記実施形態と異なっているので、この点を中心に説明する。
図6(c)にて説明したように、ディテントローラ26が目標谷部の中心を超えた位置にてモータ10が停止した場合、コギングトルクの影響により、ディテントローラ26が目標谷部の中心に落ちず、目標谷部の中心からずれた位置で停止する虞がある。
最初のS201では、目標カウント設定部53は、目標カウント値TCenを設定する目標カウント設定処理である。
S251では、目標カウント設定部53は、制御モードがモード3か否かを判断する。制御モードがモード3か否かを判断する。制御モードがモード3であると判断された場合(S251:YES)、S254へ移行する。制御モードがモード3以外であると判断された場合(S251:NO)、S252へ移行する。
S252およびS253の処理は、図8中のS101およびS102の処理と同様である。S102と同様、壁当て制御による学習を行わない場合、S253は省略可能である。
TCen=TCen(n-1)+Cr ・・・(7−1)
TCen=TCen(n-1)−Cr ・・・(7−2)
S203では、ECU50は、モータ10への通電フラグをオンにする。通電フラグのオンオフ処理は、切替制御部65にて行ってもよいし、切替制御部65とは別途に行ってもよい。
S205では、切替制御部65は、後述するタイマ値Tcをリセットし、S217へ移行する。
S208では、ECU50は、位置フィードバック制御により、モータ10の駆動を制御する。
S211では、切替制御部65は、タイマ値Tcが継続時間判定閾値Tthより小さいか否かを判断する。継続時間判定閾値Tthは、固定相通電制御を継続する通電継続時間Ta(例えば100ms)に応じて設定される値である。タイマ値Tcが継続時間判定閾値Tth以上であると判断された場合(S211:NO)、S214へ移行する。タイマ値Tcが継続時間判定閾値Tth未満であると判断された場合(S211:YES)、S212へ移行する。
S212では、切替制御部65は、制御モードをモード2にする。
S213では、ECU50は、固定相通電制御により、モータ10の駆動を制御する。
S215では、ECU50は、反転制御により、固定相通電制御によりモータ10を停止させる前とは駆動方向が反対方向となるように、モータ10を駆動する。本実施形態では、フィードバック制御により、モータ10を反転駆動する。
S218では、ECU50は、全てのスイッチング素子411〜416、421〜426をオフにする通電オフ制御とする。また、切替制御部65は、通電フラグをオフにする。通電フラグがオフされている場合は、オフ状態を継続する。
なお、補足として、第1実施形態でのモータ制御処理は、目標カウント設定処理として図8の処理が行われ、S209およびS214〜S216の処理を省略したものとなる。
時刻x1にて、目標シフトレンジが切り替わると、通電フラグがオフからオンに切り替わる。切替制御部65は、制御モードをモード1とし、モータ10の制御状態を、通電オフ制御から位置フィードバック制御に切り替える。また、図12(c)に示すように、目標シフトレンジに応じた目標カウント値TCenが設定される。ECU50が位置フィードバック制御によりモータ10を制御することで、実カウント値Cenは、目標カウント値TCenに近づく。本実施形態では、位相進みフィルタ処理を行った位相進み値Cen_plをフィードバックすることで、応答性をより高めている。また、図12(d)に示すように、モータ10が回転すると、これに伴って出力軸15が回転する。
固定相通電制御の開始から通電継続時間Taが経過する時刻x3までの期間は、固定相通電制御が継続される。このとき、制御誤差の範囲内であって、目標カウント値TCenを超えた位置でモータ10が停止しているとすると、モータ10、出力軸15およびディテントローラ26は、図9に二点鎖線で示した状態となる。
したがって、本実施形態では、固定相通電制御にてモータ10を停止した後、反転制御にてモータ10を反対方向に駆動することで、ディテントローラ26を目標谷部の中心に確実に嵌め込むことができる。
ECU50は、出力軸センサ16の検出値に基づいて出力軸15が停止したと判定された場合、反転制御を終了する。これにより、ディテントローラ26が目標谷部の中心で停止した後に、反転制御を適切に終了させることができる。
また、上記実施形態と同様の効果を奏する。
上記実施形態では、モータは、永久磁石式の3相ブラシレスモータである。他の実施形態では、モータは、永久磁石式の3相ブラシレスモータに限らず、どのようなモータを用いてもよい。また、上記実施形態では、モータに2組の巻線組が設けられる。他の実施形態では、モータの巻線組は、1組でもよいし3組以上であってもよい。
モータの制御方法は、用いるモータの種類に応じ、適宜変更可能である
また、他の実施形態では、固定相通電制御により、例えば通電相をUV→VW→WUといった具合に切り替えていくことで、モータを反転駆動してもよい。
また、モータを反転駆動させる制御方法は、どのような方法を用いてもよい。
また、上記実施形態では、エンコーダカウント値を補正するための壁当て制御を行っている。他の実施形態では、壁当て制御を省略してもよい。
また、出力軸センサは、ポテンショメータ以外のものを用いてもよいし、出力軸センサを省略してもよい。
以上、本発明は、上記実施形態になんら限定されるものではなく、発明の趣旨を逸脱しない範囲において種々の形態で実施可能である。
10・・・モータ
105・・・モータ軸
15・・・出力軸
16・・・出力軸センサ
21・・・ディテントプレート(谷部形成部材)
211〜214・・・谷部
25・・・ディテントスプリング(付勢部材)
26・・・ディテントローラ(係合部材)
50・・・ECU(モータ制御部)
Claims (4)
- モータ(10)と、
前記モータの駆動力が伝達される出力軸(15)と、
シフトレンジに応じた谷部(211〜214)が形成され、前記出力軸と一体に回転する谷部形成部材(21)と、
付勢部材(25)により前記谷部に嵌まり込む方向に付勢されており、目標シフトレンジに応じた前記谷部である目標谷部に嵌まり合う係合部材(26)と、
前記モータの駆動を制御するモータ制御部(50)と、
を備え、
前記モータの回転軸であるモータ軸(105)と前記出力軸との間には、遊びが形成されており、
前記モータ制御部は、前記係合部材が前記目標谷部の中心より駆動方向における手前側に所定量ずれた位置となるように、前記モータ目標位置を決定するシフトレンジ切替装置。 - モータ(10)と、
前記モータの駆動力が伝達される出力軸(15)と、
シフトレンジに応じた谷部が形成され、前記出力軸と一体に回転する谷部形成部材(21)と、
付勢部材(25)により前記谷部に嵌まり込む方向に付勢されており、目標シフトレンジに応じた前記谷部である目標谷部に嵌まり合う係合部材(26)と、
前記モータの駆動を制御するモータ制御部(50)と、
を備え、
前記モータの回転軸であるモータ軸(105)と前記出力軸との間には、遊びが形成されており、
前記モータ制御部は、前記モータがモータ目標位置を含む制御誤差の範囲内にて停止した後、前記モータが停止する前の回転方向とは反対方向に前記モータを駆動する反転制御を行うシフトレンジ切替装置。 - 前記出力軸の回転角を検出する出力軸センサ(16)を備え、
前記モータ制御部は、前記出力軸センサの検出値に基づいて前記出力軸が停止したと判定された場合、前記反転制御を終了する請求項2に記載のシフトレンジ切替装置。 - 前記遊びは、前記モータの駆動制御に係る制御誤差に応じた前記係合部材の位置制御幅より大きい請求項1〜3のいずれか一項に記載のシフトレンジ切替装置。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016125342A JP6601322B2 (ja) | 2016-06-24 | 2016-06-24 | シフトレンジ切替装置 |
| CN201780038640.3A CN109312851B (zh) | 2016-06-24 | 2017-06-06 | 换挡挡位切换装置 |
| DE112017003151.6T DE112017003151B4 (de) | 2016-06-24 | 2017-06-06 | Schaltbereichsumschaltvorrichtung |
| US16/311,870 US11247645B2 (en) | 2016-06-24 | 2017-06-06 | Shift range switching device |
| PCT/JP2017/020945 WO2017221689A1 (ja) | 2016-06-24 | 2017-06-06 | シフトレンジ切替装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016125342A JP6601322B2 (ja) | 2016-06-24 | 2016-06-24 | シフトレンジ切替装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017227307A true JP2017227307A (ja) | 2017-12-28 |
| JP2017227307A5 JP2017227307A5 (ja) | 2018-10-04 |
| JP6601322B2 JP6601322B2 (ja) | 2019-11-06 |
Family
ID=60784083
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016125342A Active JP6601322B2 (ja) | 2016-06-24 | 2016-06-24 | シフトレンジ切替装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11247645B2 (ja) |
| JP (1) | JP6601322B2 (ja) |
| CN (1) | CN109312851B (ja) |
| DE (1) | DE112017003151B4 (ja) |
| WO (1) | WO2017221689A1 (ja) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018155333A1 (ja) * | 2017-02-24 | 2018-08-30 | 株式会社デンソー | シフトレンジ制御装置 |
| JP2019124330A (ja) * | 2018-01-19 | 2019-07-25 | 株式会社デンソー | シフトレンジ制御装置 |
| JP2019168105A (ja) * | 2018-03-26 | 2019-10-03 | 日本電産トーソク株式会社 | シフトレンジ切替制御装置 |
| JP2021055805A (ja) * | 2019-10-01 | 2021-04-08 | 株式会社デンソー | シフトレンジ制御装置 |
| JP2021078183A (ja) * | 2019-11-05 | 2021-05-20 | 株式会社デンソー | 冗長化制御装置 |
| JPWO2021260794A1 (ja) * | 2020-06-23 | 2021-12-30 | ||
| DE112020004048T5 (de) | 2019-08-26 | 2022-09-01 | Denso Corporation | Schaltbereich-Steuervorrichtung |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6690576B2 (ja) * | 2017-02-21 | 2020-04-28 | 株式会社デンソー | シフトレンジ制御装置 |
| EP3943785A4 (en) * | 2019-03-22 | 2022-05-18 | Aisin Corporation | VEHICLE DRIVE DEVICE AND CONTROL DEVICE |
| JP7363101B2 (ja) * | 2019-05-29 | 2023-10-18 | 株式会社アイシン | シフト装置 |
| JP7453122B2 (ja) * | 2020-11-06 | 2024-03-19 | トヨタ自動車株式会社 | シフトバイワイヤシステム |
| CN114738476B (zh) * | 2021-01-07 | 2024-04-26 | 康斯博格汽车部件(无锡)有限公司 | 换挡控制方法 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006136035A (ja) * | 2004-11-02 | 2006-05-25 | Denso Corp | モータ制御装置 |
| JP2009095101A (ja) * | 2007-10-05 | 2009-04-30 | Denso Corp | モータ制御装置 |
| JP2015081665A (ja) * | 2013-10-24 | 2015-04-27 | 日立オートモティブシステムズ株式会社 | 自動変速機のレンジ切換装置 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4385768B2 (ja) | 2004-01-09 | 2009-12-16 | 株式会社デンソー | モータ制御装置 |
| JP2010096281A (ja) * | 2008-10-16 | 2010-04-30 | Aisin Aw Co Ltd | レンジ切換え装置 |
| JP2012110083A (ja) * | 2010-11-15 | 2012-06-07 | Denso Corp | モータ制御装置 |
| JP5762582B1 (ja) | 2014-02-04 | 2015-08-12 | 三菱電機株式会社 | シフトレンジ切り替え装置 |
| JP6798105B2 (ja) | 2014-12-26 | 2020-12-09 | Toto株式会社 | 排水弁装置、及び、それを備えた洗浄水タンク装置 |
-
2016
- 2016-06-24 JP JP2016125342A patent/JP6601322B2/ja active Active
-
2017
- 2017-06-06 US US16/311,870 patent/US11247645B2/en active Active
- 2017-06-06 CN CN201780038640.3A patent/CN109312851B/zh active Active
- 2017-06-06 DE DE112017003151.6T patent/DE112017003151B4/de active Active
- 2017-06-06 WO PCT/JP2017/020945 patent/WO2017221689A1/ja active Application Filing
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006136035A (ja) * | 2004-11-02 | 2006-05-25 | Denso Corp | モータ制御装置 |
| JP2009095101A (ja) * | 2007-10-05 | 2009-04-30 | Denso Corp | モータ制御装置 |
| JP2015081665A (ja) * | 2013-10-24 | 2015-04-27 | 日立オートモティブシステムズ株式会社 | 自動変速機のレンジ切換装置 |
Cited By (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11226033B2 (en) | 2017-02-24 | 2022-01-18 | Denso Corporation | Shift range control device |
| WO2018155333A1 (ja) * | 2017-02-24 | 2018-08-30 | 株式会社デンソー | シフトレンジ制御装置 |
| JP2019124330A (ja) * | 2018-01-19 | 2019-07-25 | 株式会社デンソー | シフトレンジ制御装置 |
| WO2019142576A1 (ja) * | 2018-01-19 | 2019-07-25 | 株式会社デンソー | シフトレンジ制御装置 |
| JP7028014B2 (ja) | 2018-03-26 | 2022-03-02 | 日本電産トーソク株式会社 | シフトレンジ切替制御装置 |
| JP2019168105A (ja) * | 2018-03-26 | 2019-10-03 | 日本電産トーソク株式会社 | シフトレンジ切替制御装置 |
| DE112020004048T5 (de) | 2019-08-26 | 2022-09-01 | Denso Corporation | Schaltbereich-Steuervorrichtung |
| WO2021065530A1 (ja) * | 2019-10-01 | 2021-04-08 | 株式会社デンソー | シフトレンジ制御装置 |
| JP2021055805A (ja) * | 2019-10-01 | 2021-04-08 | 株式会社デンソー | シフトレンジ制御装置 |
| CN114531895A (zh) * | 2019-10-01 | 2022-05-24 | 株式会社电装 | 换挡挡位控制装置 |
| JP7188347B2 (ja) | 2019-10-01 | 2022-12-13 | 株式会社デンソー | シフトレンジ制御装置 |
| CN114531895B (zh) * | 2019-10-01 | 2023-03-10 | 株式会社电装 | 换挡挡位控制装置 |
| JP2021078183A (ja) * | 2019-11-05 | 2021-05-20 | 株式会社デンソー | 冗長化制御装置 |
| JP7226251B2 (ja) | 2019-11-05 | 2023-02-21 | 株式会社デンソー | 冗長化制御装置 |
| JPWO2021260794A1 (ja) * | 2020-06-23 | 2021-12-30 |
Also Published As
| Publication number | Publication date |
|---|---|
| US11247645B2 (en) | 2022-02-15 |
| JP6601322B2 (ja) | 2019-11-06 |
| DE112017003151T5 (de) | 2019-03-07 |
| US20190202417A1 (en) | 2019-07-04 |
| DE112017003151B4 (de) | 2023-03-09 |
| WO2017221689A1 (ja) | 2017-12-28 |
| CN109312851B (zh) | 2020-06-19 |
| CN109312851A (zh) | 2019-02-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6601322B2 (ja) | シフトレンジ切替装置 | |
| WO2017179337A1 (ja) | シフトレンジ制御装置 | |
| CN110337780B (zh) | 换挡挡位控制装置 | |
| JP6569584B2 (ja) | シフトレンジ制御装置 | |
| JP6531707B2 (ja) | シフトレンジ制御装置 | |
| CN110325769B (zh) | 换挡挡位控制装置 | |
| JP6658416B2 (ja) | シフトレンジ制御装置 | |
| WO2019098308A1 (ja) | シフトレンジ制御装置 | |
| JP6776809B2 (ja) | シフトレンジ制御装置 | |
| WO2019098317A1 (ja) | シフトレンジ切替システム | |
| US11448316B2 (en) | Shift range control apparatus | |
| WO2017208682A1 (ja) | シフトレンジ制御装置 | |
| US11894792B2 (en) | Motor control device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180823 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180823 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190528 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190717 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190910 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190923 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6601322 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |