JP2017211036A - パワートレインの制御装置 - Google Patents
パワートレインの制御装置 Download PDFInfo
- Publication number
- JP2017211036A JP2017211036A JP2016104943A JP2016104943A JP2017211036A JP 2017211036 A JP2017211036 A JP 2017211036A JP 2016104943 A JP2016104943 A JP 2016104943A JP 2016104943 A JP2016104943 A JP 2016104943A JP 2017211036 A JP2017211036 A JP 2017211036A
- Authority
- JP
- Japan
- Prior art keywords
- speed
- engagement element
- transmission
- engine
- automatic transmission
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images







Abstract
【解決手段】車両の運転状態に基づいて決定された自動変速機1の変速比が第1変速比であるとき、通常の変速制御(ステップS6)では、1係合要素を係合させ、第2係合要素を解放させて、入力部4の回転数と出力部7の回転数との間の実回転数差を、前記第1変速比に対応する目標回転数差に一致させ、エンジン100又は自動変速機1の少なくとも一方が冷機状態であり、且つ、車両が走行状態であるときは、前記第1係合要素を解放させ、前記実回転数差と前記目標回転数差との差が所定値未満になるように前記第2係合要素をスリップ制御する(ステップS5)。
【選択図】図4
Description
エンジンと、
該エンジンと車輪との間の動力伝達経路に設けられた自動変速機とを備え、
該自動変速機は、前記エンジンに連絡された入力部、前記車輪に連絡された出力部、並びに、前記入力部と前記出力部との間に介在する第1及び第2係合要素を有するパワートレインの制御装置であって、
前記エンジン又は前記自動変速機の少なくとも一方が冷機状態であるか否かを判定する冷機状態判定手段と、
前記パワートレインを搭載した車両が走行状態であるか否かを判定する走行状態判定手段と、
前記車両の運転状態に基づいて前記自動変速機の変速比を決定する変速比決定手段と、
前記変速比決定手段により決定された変速比が第1変速比であるとき、前記第1係合要素を係合させ、前記第2係合要素を解放させて、前記入力部の回転数と前記出力部の回転数との間の実回転数差を、前記第1変速比に対応する目標回転数差に一致させる第1変速制御手段と、
前記変速比決定手段により決定された変速比が第1変速比である場合において、前記冷機状態判定手段により冷機状態であると判定され、且つ、前記走行状態判定手段により走行状態であると判定されたときは、前記第1係合要素を解放させ、前記実回転数差と前記目標回転数差との差が所定値未満になるように前記第2係合要素をスリップ制御する第2変速制御手段と、を備えていることを特徴とする。
前記第2係合要素は複数存在し、
前記第2変速制御手段は、前記複数の第2係合要素のうち、前記スリップ制御を行うことにより前記第2係合要素における一方側の回転体の回転数と他方側の回転体の回転数との間に生じる差が最大となるものについて、前記スリップ制御を行うことを特徴とする。
前記自動変速機は、前記第1係合要素と、前記第1係合要素及び前記第2係合要素とは異なる第3係合要素とが係合されることで、前記第1変速比を実現する第1変速段を形成し、前記第2係合要素と前記第3係合要素とが係合されることで、前記第1変速段とは異なる第2変速段を形成するように構成された有段式の自動変速機であり、
前記第2変速制御手段は、前記第3係合要素を係合させ、前記第1係合要素を解放させた状態で、前記第2係合要素のスリップ制御を行うことを特徴とする。
エンジンと、
該エンジンと車輪との間の動力伝達経路に設けられた自動変速機とを備え、
該自動変速機は、前記エンジンに連絡された入力部、前記車輪に連絡された出力部、及び、前記入力部と前記出力部との間に介在する変速機構、及び、前記入力部又は前記出力部と前記変速機構との間に介在する係合要素を有するパワートレインの制御装置であって、
前記エンジン又は前記自動変速機の少なくとも一方が冷機状態であるか否かを判定する冷機状態判定手段と、
前記パワートレインを搭載した車両が走行状態であるか否かを判定する走行状態判定手段と、
前記車両の運転状態に基づいて前記変速機構の変速比を決定する変速比決定手段と、
前記変速比決定手段により決定された変速比が第1変速比であるとき、前記係合要素を係合させ、且つ、前記変速機構の変速比を第1変速比に制御する第1変速制御手段と、
前記変速比決定手段により決定された変速比が第1変速比である場合において、前記冷機状態判定手段により冷機状態であると判定され、且つ、前記走行状態判定手段により走行状態であると判定されたときは、前記変速機構の変速比を前記第1変速比とは異なる第2変速比に制御し、且つ、前記入力部の回転数と前記出力部の回転数との間の実回転数差と、前記係合要素を係合させた状態における前記第1変速比に対応する目標回転数差との差が所定値未満になるように前記係合要素をスリップ制御する第2変速制御手段と、を備えていることを特徴とする。
アクセル開度を検知するアクセル開度検知手段と
前記アクセル開度検知手段により検知されたアクセル開度が所定値未満であるときに、前記第2変速制御手段による前記スリップ制御を許可するスリップ制御許可手段と、を更に備えていることを特徴とする。
ブレーキペダルの踏み込みの有無を検知するブレーキ踏込センサと、
前記ブレーキ踏込センサによりブレーキペダルの踏み込みが検知されたときに、前記第2変速制御手段による前記スリップ制御を許可するスリップ制御許可手段と、を更に備えていることを特徴とする。
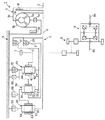
図1に示すように、本実施形態に係るパワートレインの制御装置は、車両の駆動源としてのエンジン100と、エンジン100の出力を変速して駆動輪側に伝達する自動変速機1とを有するパワートレインに関する各種制御を行うコントロールユニット110を備えている。コントロールユニット110は、例えば、エンジン100に搭載されたECU(Engine Control Unit)と、自動変速機1に搭載されたTCM(Transmission Control Module)とで構成される。
図2は、第1実施形態に係る自動変速機1の構成を示す骨子図である。この自動変速機1は、有段式の所謂ATである。第1実施形態では、フロントエンジンフロントドライブ車(FF車)等に搭載される横置き式の自動変速機1を例に説明するが、自動変速機1は縦置き式であってもよい。
図4に示すフローチャートを参照しながら、コントロールユニット110による自動変速機1に関する制御動作の一例について説明する。
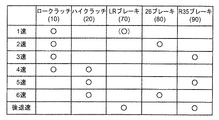
図5のサブルーチンのフローチャートに示すように、暖機促進制御では、図4のステップS2で決定された目標変速段を形成する2つの摩擦締結要素10,20,70,80,90(図3参照)のうちいずれか一方(特許請求の範囲の「第1係合要素」に相当)が解放されると共に(ステップS51)、目標変速段とは異なる変速段を形成する摩擦締結要素10,20,70,80,90(特許請求の範囲の「第2係合要素」に相当)がスリップ制御される(ステップS52)。
図6に示すフローチャートを参照しながら、コントロールユニット110による自動変速機1に関する制御動作の変形例について説明する。
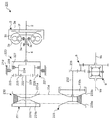
図7及び図8を参照しながら、本発明の第2実施形態について説明する。なお、第2実施形態において、第1実施形態と同様の構成については説明を省略する。また、図7において、第1実施形態と同じ構成要素については、図2と同じ符号を付している。
図9及び図10を参照しながら、本発明の第3実施形態について説明する。なお、第3実施形態において、第1実施形態と同様の構成については説明を省略する。また、図9において、第1実施形態と同じ構成要素については、図2と同じ符号を付している。
2 エンジン出力軸
3 トルクコンバータ
3f ロックアップクラッチ
4 タービンシャフト(入力部)
5 変速機構
6 変速機ケース
7 出力ギヤ(出力部)
10 ロークラッチ(係合要素)
20 ハイクラッチ(係合要素)
70 LRブレーキ(係合要素)
80 26ブレーキ(係合要素)
90 R35ブレーキ(係合要素)
100 エンジン
110 コントロールユニット
111 アクセル開度センサ
112 車速センサ
113 ブレーキ踏込センサ
114 作動油温センサ
115 入力回転数センサ
116 出力回転数センサ
124 エンジン冷却水温センサ
201 自動変速機(CVT)
220 前進後退切換機構
227 前進用クラッチ
228 後退用ブレーキ
229 入力軸
230 無段変速機構
231 プライマリプーリ
232 出力軸
233 セカンダリプーリ
234 Vベルト
301 自動変速機(DCT)
310 奇数段用クラッチ
312 奇数段用入力軸
320 偶数段用クラッチ
322 偶数段用入力軸
330 出力軸
G1 1速段用ギヤ列
G2 2速段用ギヤ列
G3 3速段用ギヤ列
G4 4速段用ギヤ列
G5 5速段用ギヤ列
S13 1−3速段用同期装置
S24 2−4速段用同期装置
S50 5速段用同期装置
Claims (6)
- エンジンと、
該エンジンと車輪との間の動力伝達経路に設けられた自動変速機とを備え、
該自動変速機は、前記エンジンに連絡された入力部、前記車輪に連絡された出力部、並びに、前記入力部と前記出力部との間に介在する第1及び第2係合要素を有するパワートレインの制御装置であって、
前記エンジン又は前記自動変速機の少なくとも一方が冷機状態であるか否かを判定する冷機状態判定手段と、
前記パワートレインを搭載した車両が走行状態であるか否かを判定する走行状態判定手段と、
前記車両の運転状態に基づいて前記自動変速機の変速比を決定する変速比決定手段と、
前記変速比決定手段により決定された変速比が第1変速比であるとき、前記第1係合要素を係合させ、前記第2係合要素を解放させて、前記入力部の回転数と前記出力部の回転数との間の実回転数差を、前記第1変速比に対応する目標回転数差に一致させる第1変速制御手段と、
前記変速比決定手段により決定された変速比が第1変速比である場合において、前記冷機状態判定手段により冷機状態であると判定され、且つ、前記走行状態判定手段により走行状態であると判定されたときは、前記第1係合要素を解放させ、前記実回転数差と前記目標回転数差との差が所定値未満になるように前記第2係合要素をスリップ制御する第2変速制御手段と、を備えていることを特徴とするパワートレインの制御装置。 - 前記第2係合要素は複数存在し、
前記第2変速制御手段は、前記複数の第2係合要素のうち、前記スリップ制御を行うことにより前記第2係合要素における一方側の回転体の回転数と他方側の回転体の回転数との間に生じる差が最大となるものについて、前記スリップ制御を行うことを特徴とする請求項1に記載のパワートレインの制御装置。 - 前記自動変速機は、前記第1係合要素と、前記第1係合要素及び前記第2係合要素とは異なる第3係合要素とが係合されることで、前記第1変速比を実現する第1変速段を形成し、前記第2係合要素と前記第3係合要素とが係合されることで、前記第1変速段とは異なる第2変速段を形成するように構成された有段式の自動変速機であり、
前記第2変速制御手段は、前記第3係合要素を係合させ、前記第1係合要素を解放させた状態で、前記第2係合要素のスリップ制御を行うことを特徴とする請求項1又は請求項2に記載のパワートレインの制御装置。 - エンジンと、
該エンジンと車輪との間の動力伝達経路に設けられた自動変速機とを備え、
該自動変速機は、前記エンジンに連絡された入力部、前記車輪に連絡された出力部、及び、前記入力部と前記出力部との間に介在する変速機構、及び、前記入力部又は前記出力部と前記変速機構との間に介在する係合要素を有するパワートレインの制御装置であって、
前記エンジン又は前記自動変速機の少なくとも一方が冷機状態であるか否かを判定する冷機状態判定手段と、
前記パワートレインを搭載した車両が走行状態であるか否かを判定する走行状態判定手段と、
前記車両の運転状態に基づいて前記変速機構の変速比を決定する変速比決定手段と、
前記変速比決定手段により決定された変速比が第1変速比であるとき、前記係合要素を係合させ、且つ、前記変速機構の変速比を第1変速比に制御する第1変速制御手段と、
前記変速比決定手段により決定された変速比が第1変速比である場合において、前記冷機状態判定手段により冷機状態であると判定され、且つ、前記走行状態判定手段により走行状態であると判定されたときは、前記変速機構の変速比を前記第1変速比とは異なる第2変速比に制御し、且つ、前記入力部の回転数と前記出力部の回転数との間の実回転数差と、前記係合要素を係合させた状態における前記第1変速比に対応する目標回転数差との差が所定値未満になるように前記係合要素をスリップ制御する第2変速制御手段と、を備えていることを特徴とするパワートレインの制御装置。 - アクセル開度を検知するアクセル開度検知手段と
前記アクセル開度検知手段により検知されたアクセル開度が所定値未満であるときに、前記第2変速制御手段による前記スリップ制御を許可するスリップ制御許可手段と、を更に備えていることを特徴とする請求項1から請求項4のいずれか1項に記載のパワートレインの制御装置。 - ブレーキペダルの踏み込みの有無を検知するブレーキ踏込センサと、
前記ブレーキ踏込センサによりブレーキペダルの踏み込みが検知されたときに、前記第2変速制御手段による前記スリップ制御を許可するスリップ制御許可手段と、を更に備えていることを特徴とする請求項1から請求項5のいずれか1項に記載のパワートレインの制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016104943A JP6361692B2 (ja) | 2016-05-26 | 2016-05-26 | パワートレインの制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016104943A JP6361692B2 (ja) | 2016-05-26 | 2016-05-26 | パワートレインの制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017211036A true JP2017211036A (ja) | 2017-11-30 |
| JP6361692B2 JP6361692B2 (ja) | 2018-07-25 |
Family
ID=60476029
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016104943A Expired - Fee Related JP6361692B2 (ja) | 2016-05-26 | 2016-05-26 | パワートレインの制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6361692B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109240136A (zh) * | 2018-09-14 | 2019-01-18 | 北京全路通信信号研究设计院集团有限公司 | 一种停车器控制方法及其控制系统 |
| JP2019065945A (ja) * | 2017-09-29 | 2019-04-25 | 株式会社Subaru | 変速機の制御装置 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09317864A (ja) * | 1996-05-27 | 1997-12-12 | Toyota Motor Corp | 自動変速機の制御装置 |
| JP2002323124A (ja) * | 2001-04-24 | 2002-11-08 | Toyota Motor Corp | 動力伝達装置用作動油温の制御装置 |
| JP2003247637A (ja) * | 2002-02-27 | 2003-09-05 | Suzuki Motor Corp | 車両用クリープ現象抑制装置 |
| JP2012154427A (ja) * | 2011-01-26 | 2012-08-16 | Toyota Motor Corp | 自動変速機の制御装置 |
| JP2013053725A (ja) * | 2011-09-06 | 2013-03-21 | Aisin Ai Co Ltd | 車両の動力伝達制御装置 |
| JP2015001259A (ja) * | 2013-06-14 | 2015-01-05 | ジヤトコ株式会社 | 駆動システム |
-
2016
- 2016-05-26 JP JP2016104943A patent/JP6361692B2/ja not_active Expired - Fee Related
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09317864A (ja) * | 1996-05-27 | 1997-12-12 | Toyota Motor Corp | 自動変速機の制御装置 |
| JP2002323124A (ja) * | 2001-04-24 | 2002-11-08 | Toyota Motor Corp | 動力伝達装置用作動油温の制御装置 |
| JP2003247637A (ja) * | 2002-02-27 | 2003-09-05 | Suzuki Motor Corp | 車両用クリープ現象抑制装置 |
| JP2012154427A (ja) * | 2011-01-26 | 2012-08-16 | Toyota Motor Corp | 自動変速機の制御装置 |
| JP2013053725A (ja) * | 2011-09-06 | 2013-03-21 | Aisin Ai Co Ltd | 車両の動力伝達制御装置 |
| JP2015001259A (ja) * | 2013-06-14 | 2015-01-05 | ジヤトコ株式会社 | 駆動システム |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019065945A (ja) * | 2017-09-29 | 2019-04-25 | 株式会社Subaru | 変速機の制御装置 |
| CN109240136A (zh) * | 2018-09-14 | 2019-01-18 | 北京全路通信信号研究设计院集团有限公司 | 一种停车器控制方法及其控制系统 |
| CN109240136B (zh) * | 2018-09-14 | 2020-11-06 | 北京全路通信信号研究设计院集团有限公司 | 一种停车器控制方法及其控制系统 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6361692B2 (ja) | 2018-07-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US6641498B2 (en) | Apparatus for controlling temperature of fluid in power-transmission system and method of controlling temperature of fluid in power-transmission system | |
| JP5429563B2 (ja) | 車両用制御装置及び車両駆動システム | |
| JP5575522B2 (ja) | ハイブリッド車両の動力制御装置 | |
| US20150307101A1 (en) | Vehicle and method to control rolling engagements | |
| JP4356665B2 (ja) | 複数クラッチ式変速機 | |
| US20170297559A1 (en) | Hybrid Vehicle and Control Method For Hybrid Vehicle | |
| JP2009184433A (ja) | 車両用パワートレーン | |
| US20200023726A1 (en) | Control device | |
| JP4650263B2 (ja) | 動力伝達装置の制御装置 | |
| US8989973B2 (en) | Vehicle and control apparatus for automatic transmission | |
| JP6361692B2 (ja) | パワートレインの制御装置 | |
| JP5877730B2 (ja) | 軸受止め構造 | |
| JP4577073B2 (ja) | 複数クラッチ式変速機の制御装置 | |
| JP2007182977A (ja) | クラッチ式変速機の制御装置 | |
| JP4696880B2 (ja) | クラッチ式変速機の制御装置 | |
| JP5471898B2 (ja) | 自動変速機のニュートラル制御装置 | |
| JP2010209949A (ja) | 車両用動力伝達装置の制御装置 | |
| JP6215186B2 (ja) | 動力伝達装置 | |
| JP6204856B2 (ja) | 自動変速機 | |
| JP2013194853A (ja) | 駆動装置潤滑構造 | |
| JP2004522910A (ja) | 自動車駆動ユニット | |
| JP5947070B2 (ja) | 変速機の制御装置 | |
| JP2008223991A (ja) | トルクコンバータ及び自動変速装置 | |
| JP2017074910A (ja) | 自動変速装置 | |
| JP2007298105A (ja) | クラッチ式変速機の制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20171031 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20171225 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180529 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180611 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6361692 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |