JP2017198796A - 保持装置、計測装置、および物品の製造方法 - Google Patents
保持装置、計測装置、および物品の製造方法 Download PDFInfo
- Publication number
- JP2017198796A JP2017198796A JP2016088224A JP2016088224A JP2017198796A JP 2017198796 A JP2017198796 A JP 2017198796A JP 2016088224 A JP2016088224 A JP 2016088224A JP 2016088224 A JP2016088224 A JP 2016088224A JP 2017198796 A JP2017198796 A JP 2017198796A
- Authority
- JP
- Japan
- Prior art keywords
- optical element
- holding device
- elastic part
- pattern
- elastic
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images


Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/24—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures
- G01B11/25—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures by projecting a pattern, e.g. one or more lines, moiré fringes on the object
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/008—Mountings, adjusting means, or light-tight connections, for optical elements with means for compensating for changes in temperature or for controlling the temperature; thermal stabilisation
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B26/00—Optical devices or arrangements for the control of light using movable or deformable optical elements
- G02B26/08—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light
- G02B26/0816—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light by means of one or more reflecting elements
- G02B26/0833—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light by means of one or more reflecting elements the reflecting element being a micromechanical device, e.g. a MEMS mirror, DMD
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Engineering & Computer Science (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Mounting And Adjusting Of Optical Elements (AREA)
Abstract
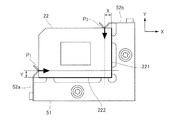
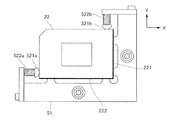
【解決手段】光学素子22を保持する保持装置であって、光学素子22の互いに隣接する第1側面221および第2側面222を位置決めする位置決め部51と、位置決め部51に支持され、第1側面221に対向する光学素子22の第3側面に付勢力を加える第1弾性部52aと、位置決め部51に支持され、第2側面222に対向する光学素子22の第4側面に付勢力を加える第2弾性部52bと、第1弾性部52aと光学素子22との間の線膨張量の差と、第2弾性部52bと光学素子22との間の線膨張量の差とが、ともに閾値以下になるように、第1弾性部52aと第2弾性部52bとが構成されている。
【選択図】図3
Description
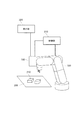
上述の保持装置を備えた計測装置は、ある支持部材に支持された状態で使用されうる。本実施形態では、一例として、図6のようにロボットアーム300(把持装置)に備え付けられて使用される制御システムについて説明する。計測装置100は、支持台200に置かれた被検物210にパターン光を投影して撮像し、画像を取得する。そして、計測装置100の制御部が、又は、計測装置100の制御部から画像データを取得した制御部310が、被検物210の位置および姿勢を求め、その結果、当該位置および姿勢の情報を制御部310が取得する。制御部310は、その位置および姿勢の情報(計測結果)に基づいて、ロボットアーム300に駆動指令を送ってロボットアーム300を制御する。ロボットアーム300は先端のロボットハンドなど(把持部)で被検物210を保持して、並進や回転などの移動をさせる。さらに、ロボットアーム300によって被検物210を他の部品に組み付ける(組立する)ことにより、複数の部品で構成された物品、例えば電子回路基板や機械などを製造することができる。また、移動された被検物210を加工することにより、物品を製造することができる。制御部310は、CPUなどの演算装置やメモリなどの記憶装置を有する。なお、ロボットを制御する制御部を制御部310の外部に設けても良い。また、計測装置100により計測された計測データや得られた画像をディスプレイなどの表示部320に表示してもよい。
以上、本発明の好ましい実施形態について説明したが、本発明は、これらの実施形態に限定されず、その要旨の範囲内で種々の変形および変更が可能である。
50 保持装置
51 固定部(位置決め部)
52 弾性部
52a、52b 板ばね
Claims (10)
- 光学素子を保持する保持装置であって、
前記光学素子の互いに隣接する第1側面および第2側面を位置決めする位置決め部と、
前記位置決め部に支持され、前記第1側面に対向する前記光学素子の第3側面に付勢力を加える第1弾性部と、
前記位置決め部に支持され、前記第2側面に対向する前記光学素子の第4側面に付勢力を加える第2弾性部と、
前記第1弾性部と前記光学素子との間の線膨張量の差と、前記第2弾性部と前記光学素子との間の線膨張量の差とが、ともに閾値以下になるように、前記第1弾性部と前記第2弾性部とが構成されていることを特徴とする保持装置。 - 前記光学素子の線膨張係数をα、前記第1弾性部の線膨張係数をβ、温度の変化の量をΔt、前記閾値をZとして、前記第1弾性部が前記光学素子に前記付勢力を加える初期位置の前記第2側面からの距離は、
Z/(|α−β|×Δt)
で得られる値以下であることを特徴とする請求項1に記載の保持装置。 - 前記光学素子の線膨張係数をα、前記第2弾性部の線膨張係数をβ、温度の変化の量をΔt、前記閾値をZとして、前記第2弾性部が前記光学素子に前記付勢力を加える初期位置の前記第1側面からの距離は、
Z/(|α−β|×Δt)
で得られる値以下であることを特徴とする請求項1に記載の保持装置。 - 前記位置決め部は、前記第1側面および前記第2側面のうちの少なくとも一方を位置決めするための凸部を有することを特徴とする請求項1乃至3のうちいずれか1項に記載の保持装置。
- 前記位置決め部は、前記第1弾性部が前記光学素子に前記付勢力を加える位置および前記第2弾性部が前記光学素子に前記付勢力を加える位置のうちの少なくとも一方に対向する位置に前記凸部を有することを特徴とする請求項4に記載の保持装置。
- 前記弾性部は、前記位置決め部に固定されていることを特徴とする請求項1乃至5のうちいずれか1項に記載の保持装置。
- 前記弾性部は、板ばねまたは圧縮ばねを含むことを特徴とする請求項1乃至6のうちいずれか1項に記載の保持装置。
- 光学素子を有し、前記光学素子を介してパターンを物体に投影し、前記パターンを投影された前記物体を撮像することにより前記物体の計測を行う計測装置であって、
前記光学素子を保持する請求項1乃至7のうちいずれか1項に記載の保持装置を有することを特徴とする計測装置。 - 請求項8に記載の計測装置と、
前記計測装置による計測を行われた前記物体の移動を行うロボットと、
を有するシステム。 - 請求項8に記載の計測装置により計測を行われた物体の移動をロボットにより行う工程と、
前記工程で前記移動を行われた前記物体を処理する工程と、
を含むことを特徴とする物品の製造方法。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016088224A JP2017198796A (ja) | 2016-04-26 | 2016-04-26 | 保持装置、計測装置、および物品の製造方法 |
| US15/496,169 US10359275B2 (en) | 2016-04-26 | 2017-04-25 | Holding apparatus, measurement apparatus, and article manufacturing method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016088224A JP2017198796A (ja) | 2016-04-26 | 2016-04-26 | 保持装置、計測装置、および物品の製造方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017198796A true JP2017198796A (ja) | 2017-11-02 |
| JP2017198796A5 JP2017198796A5 (ja) | 2019-05-30 |
Family
ID=60090058
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016088224A Pending JP2017198796A (ja) | 2016-04-26 | 2016-04-26 | 保持装置、計測装置、および物品の製造方法 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US10359275B2 (ja) |
| JP (1) | JP2017198796A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022024325A1 (ja) * | 2020-07-30 | 2022-02-03 | 三菱電機株式会社 | 光学部品ユニット、光学ユニット、測距装置および光学ユニットの製造方法 |
| WO2024061594A1 (en) * | 2022-09-20 | 2024-03-28 | Carl Zeiss Smt Gmbh | Holding device for an optical component having an optical surface with a polygonal border and having a cylindrical substrate body |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108051880B (zh) * | 2017-12-08 | 2020-01-21 | 苏州大学 | 一种金属多面扫描棱镜的加工方法 |
| CN108050959B (zh) * | 2017-12-12 | 2020-01-21 | 苏州大学 | 一种用于金属多面扫描棱镜加工的在线检测系统 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000089363A (ja) * | 1998-06-26 | 2000-03-31 | Matsushita Electric Ind Co Ltd | プロジェクタ |
| JP2003233125A (ja) * | 2001-12-07 | 2003-08-22 | Victor Co Of Japan Ltd | 投射型表示装置 |
| JP2004205917A (ja) * | 2002-12-26 | 2004-07-22 | Victor Co Of Japan Ltd | 投射型表示装置 |
| JP2010243686A (ja) * | 2009-04-03 | 2010-10-28 | Konica Minolta Opto Inc | 画像投影装置及び画素ずれ量の検出方法 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002365612A (ja) | 2001-06-05 | 2002-12-18 | Sony Corp | 液晶表示素子の保持装置および液晶表示素子の保持装置を有する投写型画像表示装置 |
| JP2003161701A (ja) | 2001-11-28 | 2003-06-06 | Olympus Optical Co Ltd | 照明装置 |
| JP4875896B2 (ja) * | 2006-01-11 | 2012-02-15 | 株式会社リコー | 光走査装置及びこれを備える画像形成装置並びにレンズ位置調整方法 |
| JP5460341B2 (ja) | 2010-01-06 | 2014-04-02 | キヤノン株式会社 | 3次元計測装置及びその制御方法 |
| JP2013068774A (ja) * | 2011-09-22 | 2013-04-18 | Sony Corp | 光学装置、および投影装置 |
| JP2017203871A (ja) | 2016-05-11 | 2017-11-16 | キヤノン株式会社 | 保持装置、計測装置、および物品製造方法 |
-
2016
- 2016-04-26 JP JP2016088224A patent/JP2017198796A/ja active Pending
-
2017
- 2017-04-25 US US15/496,169 patent/US10359275B2/en not_active Expired - Fee Related
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000089363A (ja) * | 1998-06-26 | 2000-03-31 | Matsushita Electric Ind Co Ltd | プロジェクタ |
| JP2003233125A (ja) * | 2001-12-07 | 2003-08-22 | Victor Co Of Japan Ltd | 投射型表示装置 |
| JP2004205917A (ja) * | 2002-12-26 | 2004-07-22 | Victor Co Of Japan Ltd | 投射型表示装置 |
| JP2010243686A (ja) * | 2009-04-03 | 2010-10-28 | Konica Minolta Opto Inc | 画像投影装置及び画素ずれ量の検出方法 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022024325A1 (ja) * | 2020-07-30 | 2022-02-03 | 三菱電機株式会社 | 光学部品ユニット、光学ユニット、測距装置および光学ユニットの製造方法 |
| WO2024061594A1 (en) * | 2022-09-20 | 2024-03-28 | Carl Zeiss Smt Gmbh | Holding device for an optical component having an optical surface with a polygonal border and having a cylindrical substrate body |
Also Published As
| Publication number | Publication date |
|---|---|
| US10359275B2 (en) | 2019-07-23 |
| US20170307364A1 (en) | 2017-10-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7069535B2 (ja) | 露光装置及び露光方法、並びにデバイス製造方法 | |
| US10359275B2 (en) | Holding apparatus, measurement apparatus, and article manufacturing method | |
| US10379450B2 (en) | Apparatus and methods for on-the-fly digital exposure image data modification | |
| TWI781959B (zh) | 移動體裝置、移動方法、曝光裝置、曝光方法、平板顯示器之製造方法、以及元件製造方法 | |
| JP2019105854A5 (ja) | ||
| JP7308943B2 (ja) | レイアウト適応型パッケージングの動的生成 | |
| KR20120091158A (ko) | 노광 장치, 노광 방법, 및 디바이스 제조 방법 | |
| JP2015065246A (ja) | 光学装置、光学系、露光装置及び物品の製造方法 | |
| TW201823882A (zh) | 移動體裝置、移動方法、曝光裝置、曝光方法、平板顯示器之製造方法、以及元件製造方法 | |
| JP2023126759A (ja) | デジタルリソグラフィツールのためのモデルベース動的位置補正 | |
| JP4522142B2 (ja) | 露光装置、露光方法、及び基板製造方法 | |
| US20170328705A1 (en) | Holding apparatus, measurement apparatus, and article manufacturing method | |
| US10114297B2 (en) | Active eye-to-eye with alignment by X-Y capacitance measurement | |
| JP4424739B2 (ja) | ステージ装置 | |
| CN105474104A (zh) | 曝光装置 | |
| TW201823881A (zh) | 移動體裝置、移動方法、曝光裝置、曝光方法、平板顯示器之製造方法、以及元件製造方法 | |
| KR20130028461A (ko) | 투영격자의 진폭을 적용한 3차원 형상 측정장치 및 방법 | |
| JP4962780B2 (ja) | ステージ装置およびその浮上制御方法と、ステージ装置を用いた露光装置 | |
| JP6614880B2 (ja) | リソグラフィ装置および物品の製造方法 | |
| TW201827939A (zh) | 移動體裝置、移動方法、曝光裝置、曝光方法、平板顯示器之製造方法、以及元件製造方法 | |
| KR102321780B1 (ko) | 결정 방법, 광학 장치, 투영 광학계, 노광 장치 및 물품의 제조 방법 | |
| JP2019045182A (ja) | 3次元計測装置及び3次元計測方法 | |
| JP6298345B2 (ja) | 計測方法、露光装置及び物品の製造方法 | |
| JP2018048938A (ja) | 計測装置、システム、および物品の製造方法 | |
| JP2017198758A (ja) | 露光装置、露光方法、およびデバイス製造方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190416 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190416 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20191212 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200107 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20200630 |