JP2017194913A - プローブ情報処理サーバ、プローブ車両、およびプローブ情報処理方法 - Google Patents
プローブ情報処理サーバ、プローブ車両、およびプローブ情報処理方法 Download PDFInfo
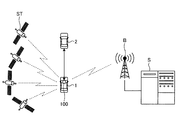
- Publication number
- JP2017194913A JP2017194913A JP2016086213A JP2016086213A JP2017194913A JP 2017194913 A JP2017194913 A JP 2017194913A JP 2016086213 A JP2016086213 A JP 2016086213A JP 2016086213 A JP2016086213 A JP 2016086213A JP 2017194913 A JP2017194913 A JP 2017194913A
- Authority
- JP
- Japan
- Prior art keywords
- probe
- vehicle
- information
- driving
- probe vehicle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images










Landscapes
- Instructional Devices (AREA)
- Traffic Control Systems (AREA)
Abstract
Description
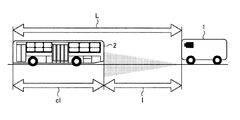
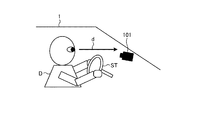
2 先行車両
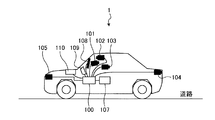
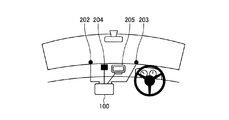
100 制御装置
101〜104,202,203 カメラ
105 レーダ
107 ECU
108 表示部
109 スピーカ
110 通信機器
204 GPSアンテナ
205 携帯端末
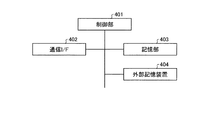
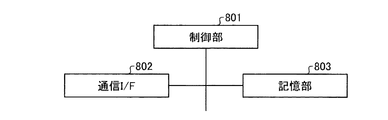
401,801 制御部
402,802 通信I/F
403,803 記憶部
404 外部記憶装置
S プローブ情報処理サーバ
Claims (15)
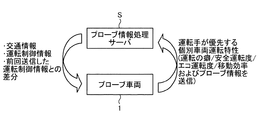
- プローブ車両から、当該プローブ車両の走行に関する情報でありかつ前記プローブ車両の走行位置を含むプローブ情報を受信する受信部と、
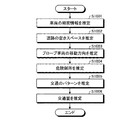
受信した前記プローブ情報に基づいて、地図上における道路の各区間の交通情報を推定する推定部と、
運転制御対象の前記プローブ車両が走行する前記区間の前記交通情報に対応する推奨走行方法と、前記運転制御対象のプローブ車両から受信した前記プローブ情報に基づく当該プローブ車両の走行方法との差分に基づいて、当該差分を減少させることを指示する運転制御情報を生成する生成部と、
生成した前記運転制御情報を前記運転制御対象のプローブ車両に送信する送信部と、
を備えるプローブ情報処理サーバ。 - 前記受信部は、前記プローブ車両の運転の癖、安全運転、環境負荷、および移動効率のうち少なくとも1つに関する個別車両運転特性を含む前記プローブ情報を受信し、
前記生成部は、前記運転制御対象のプローブ車両から受信した前記プローブ情報が含む前記個別車両運転特性と、前記運転制御対象のプローブ車両が走行する前記区間の前記交通情報に対応する推奨運転特性とを比較し、その比較結果に基づいて、前記個別車両運転特性を前記推奨運転特性に近づける前記運転制御情報を生成する請求項1に記載のプローブ情報処理サーバ。 - 前記個別車両運転特性は、前記プローブ車両の安全運転の度合いを示す安全運転度、前記プローブ車両の走行による環境負荷の度合いを示すエコ運転度、および前記プローブ車両の所定時間当たりの移動距離を示す移動効率の少なくとも1つを含む請求項2に記載のプローブ情報処理サーバ。
- 前記交通情報と当該交通情報に対応する前記推奨走行方法とを対応付けて記憶する記憶部をさらに備え、
前記生成部は、前記記憶部において、前記運転制御対象のプローブ車両が走行する道路の前記交通情報と対応付けて記憶された前記推奨走行方法と、前記運転制御対象のプローブ車両の走行方法との差分に基づいて、前記運転制御情報を生成する請求項1から3のいずれか一に記載のプローブ情報処理サーバ。 - 前記推定部は、地図上の道路の車両の粗密情報、空きスペース、移動方向、危険個所、および渋滞情報のうち少なくとも1つを前記交通情報として推定する請求項1から4のいずれか一に記載のプローブ情報処理サーバ。
- 前記プローブ情報は、前記プローブ車両と先行車両との車間距離または車頭間距離を含み、
前記推定部は、前記プローブ情報が含む前記車間距離または前記車頭間距離に基づいて、地図上の道路の車両の密度または流量を前記交通情報として推定する請求項1から5のいずれか一に記載のプローブ情報処理サーバ。 - プローブ車両の走行に関する情報でありかつ前記プローブ車両の走行位置を含むプローブ情報をプローブ情報処理サーバに送信する送信部と、
前記プローブ情報処理サーバから、前記プローブ車両の走行方法と、前記プローブ情報に基づく地図上における道路の各区間の交通情報に対応する推奨走行方法との差分を減少させることを指示する運転制御情報を受信する受信部と、
受信した前記運転制御情報に従って、前記プローブ車両の走行を制御する制御部と、
を備えたプローブ車両。 - 前記プローブ車両と先行車両との車間距離または車頭間距離、前記プローブ車両の走行位置、および前記プローブ車両の走行速度の少なくとも1つの時間変化に基づいて、前記プローブ車両の安全運転の度合いである安全運転度を判定する安全度判定部をさらに備え、
前記送信部は、前記安全運転度を含む前記プローブ情報を前記プローブ情報処理サーバに送信する請求項7に記載のプローブ車両。 - 前記プローブ車両の加減速および前記プローブ車両の走行速度の平均の少なくとも1つに基づいて、前記プローブ車両の走行による環境負荷の度合いを示すエコ運転度を判定するエコ運転度判定部をさらに備え、
前記送信部は、前記エコ運転度を含む前記プローブ情報を前記プローブ情報処理サーバに送信する請求項7に記載のプローブ車両。 - 前記プローブ車両の走行位置の時間変化に基づいて、前記プローブ車両の所定時間当たりの移動距離を示す移動効率を算出する移動効率算出部をさらに備え、
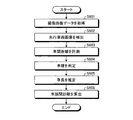
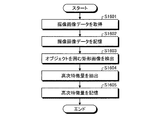
前記送信部は、前記移動効率を含む前記プローブ情報を前記プローブ情報処理サーバに送信する請求項7に記載のプローブ車両。 - プローブ車両から、当該プローブ車両の走行に関する情報でありかつ前記プローブ車両の走行位置を含むプローブ情報を受信し、
受信した前記プローブ情報に基づいて、地図上における道路の各区間の交通情報を推定し、
運転制御対象の前記プローブ車両が走行する前記区間の前記交通情報に対応する推奨走行方法と、前記運転制御対象のプローブ車両から受信した前記プローブ情報に基づく当該プローブ車両の走行方法との差分に基づいて、当該差分を減少させることを指示する運転制御情報を生成し、
生成した前記運転制御情報を前記運転制御対象のプローブ車両に送信する、
ことを含むプローブ情報処理方法。 - 前記プローブ車両の運転の癖、安全運転、環境負荷、および移動効率のうち少なくとも1つに関する個別車両運転特性を含む前記プローブ情報を受信し、
前記生成部は、前記運転制御対象のプローブ車両から受信した前記プローブ情報が含む前記個別車両運転特性と、前記運転制御対象のプローブ車両が走行する前記区間の前記交通情報に対応する推奨運転特性とを比較し、その比較結果に基づいて、前記個別車両運転特性を前記推奨運転特性に近づける前記運転制御情報を生成する請求項11に記載のプローブ情報処理方法。 - 前記個別車両運転特性は、前記プローブ車両の安全運転の度合いを示す安全運転度、前記プローブ車両の走行による環境負荷の度合いを示すエコ運転度、および前記プローブ車両の所定時間当たりの移動距離を示す移動効率の少なくとも1つを含む請求項12に記載のプローブ情報処理方法。
- 記憶部において、前記運転制御対象のプローブ車両が走行する道路の前記交通情報と対応付けて記憶された前記推奨走行方法と、前記運転制御対象のプローブ車両の走行方法との差分に基づいて、前記運転制御情報を生成する請求項11から13のいずれか一に記載のプローブ情報処理方法。
- 前記プローブ情報は、前記プローブ車両と先行車両との車間距離または車頭間距離を含み、
前記プローブ情報が含む前記車間距離または前記車頭間距離に基づいて、地図上の道路の車両の密度または流量を前記交通情報として推定する請求項11から14のいずれか一に記載のプローブ情報処理方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016086213A JP6896374B2 (ja) | 2016-04-22 | 2016-04-22 | プローブ情報処理サーバ、およびプローブ情報処理方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016086213A JP6896374B2 (ja) | 2016-04-22 | 2016-04-22 | プローブ情報処理サーバ、およびプローブ情報処理方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017194913A true JP2017194913A (ja) | 2017-10-26 |
| JP6896374B2 JP6896374B2 (ja) | 2021-06-30 |
Family
ID=60156405
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016086213A Active JP6896374B2 (ja) | 2016-04-22 | 2016-04-22 | プローブ情報処理サーバ、およびプローブ情報処理方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6896374B2 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019163813A1 (ja) * | 2018-02-22 | 2019-08-29 | 本田技研工業株式会社 | 車両制御システム、車両制御方法、およびプログラム |
| JP2019175366A (ja) * | 2018-03-29 | 2019-10-10 | 株式会社トヨタマップマスター | 情報生成装置、情報生成方法、プログラム及び記録媒体 |
| CN112833894A (zh) * | 2019-11-25 | 2021-05-25 | 丰田自动车株式会社 | 信息提供系统、信息提供装置和非暂时性计算机可读介质 |
| JPWO2022145351A1 (ja) * | 2020-12-28 | 2022-07-07 |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09249053A (ja) * | 1996-03-13 | 1997-09-22 | Nissan Motor Co Ltd | 車両用制御装置 |
| JP2002123894A (ja) * | 2000-10-16 | 2002-04-26 | Hitachi Ltd | プローブカー制御方法及び装置並びにプローブカーを用いた交通制御システム |
| JP2003228800A (ja) * | 2002-02-01 | 2003-08-15 | Nissan Motor Co Ltd | 車両用推奨操作量生成装置 |
| JP2004185245A (ja) * | 2002-12-03 | 2004-07-02 | Omron Corp | 安全走行情報仲介システムおよびそれに用いる安全走行情報仲介装置と安全走行情報の確認方法 |
| JP2008158562A (ja) * | 2006-12-20 | 2008-07-10 | Toyota Motor Corp | 交通情報配信センタ、車両用プローブ装置、交通情報システム及び交通情報配信センタの交通情報配信方法 |
| JP2008186082A (ja) * | 2007-01-26 | 2008-08-14 | Toyota Motor Corp | 情報作成システム |
| JP2010086070A (ja) * | 2008-09-29 | 2010-04-15 | Toshiba Corp | 道路交通情報提供システム及び方法 |
| WO2010122666A1 (ja) * | 2009-04-24 | 2010-10-28 | トヨタ自動車株式会社 | 車載機及び情報処理センター |
| JP2015007902A (ja) * | 2013-06-25 | 2015-01-15 | 株式会社東芝 | 道路状況把握システム、及び道路状況把握装置 |
| WO2015111344A1 (ja) * | 2014-01-21 | 2015-07-30 | トヨタ自動車 株式会社 | 特異走行箇所検出装置および特異走行箇所検出方法 |
-
2016
- 2016-04-22 JP JP2016086213A patent/JP6896374B2/ja active Active
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09249053A (ja) * | 1996-03-13 | 1997-09-22 | Nissan Motor Co Ltd | 車両用制御装置 |
| JP2002123894A (ja) * | 2000-10-16 | 2002-04-26 | Hitachi Ltd | プローブカー制御方法及び装置並びにプローブカーを用いた交通制御システム |
| JP2003228800A (ja) * | 2002-02-01 | 2003-08-15 | Nissan Motor Co Ltd | 車両用推奨操作量生成装置 |
| JP2004185245A (ja) * | 2002-12-03 | 2004-07-02 | Omron Corp | 安全走行情報仲介システムおよびそれに用いる安全走行情報仲介装置と安全走行情報の確認方法 |
| JP2008158562A (ja) * | 2006-12-20 | 2008-07-10 | Toyota Motor Corp | 交通情報配信センタ、車両用プローブ装置、交通情報システム及び交通情報配信センタの交通情報配信方法 |
| JP2008186082A (ja) * | 2007-01-26 | 2008-08-14 | Toyota Motor Corp | 情報作成システム |
| JP2010086070A (ja) * | 2008-09-29 | 2010-04-15 | Toshiba Corp | 道路交通情報提供システム及び方法 |
| WO2010122666A1 (ja) * | 2009-04-24 | 2010-10-28 | トヨタ自動車株式会社 | 車載機及び情報処理センター |
| JP2015007902A (ja) * | 2013-06-25 | 2015-01-15 | 株式会社東芝 | 道路状況把握システム、及び道路状況把握装置 |
| WO2015111344A1 (ja) * | 2014-01-21 | 2015-07-30 | トヨタ自動車 株式会社 | 特異走行箇所検出装置および特異走行箇所検出方法 |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019163813A1 (ja) * | 2018-02-22 | 2019-08-29 | 本田技研工業株式会社 | 車両制御システム、車両制御方法、およびプログラム |
| JPWO2019163813A1 (ja) * | 2018-02-22 | 2020-12-03 | 本田技研工業株式会社 | 車両制御システム、車両制御方法、およびプログラム |
| JP2019175366A (ja) * | 2018-03-29 | 2019-10-10 | 株式会社トヨタマップマスター | 情報生成装置、情報生成方法、プログラム及び記録媒体 |
| CN112833894A (zh) * | 2019-11-25 | 2021-05-25 | 丰田自动车株式会社 | 信息提供系统、信息提供装置和非暂时性计算机可读介质 |
| JPWO2022145351A1 (ja) * | 2020-12-28 | 2022-07-07 | ||
| WO2022145351A1 (ja) * | 2020-12-28 | 2022-07-07 | 株式会社Subaru | 車両の運転制御システム、及び、車両の運転制御装置 |
| JP7412603B2 (ja) | 2020-12-28 | 2024-01-12 | 株式会社Subaru | 車両の運転制御システム、及び、車両の運転制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6896374B2 (ja) | 2021-06-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3339999B1 (en) | Information processing apparatus, information processing method, and recording medium storing programm | |
| US9550496B2 (en) | Travel control apparatus | |
| JP6325670B2 (ja) | 車線選択装置、車両制御システム及び車線選択方法 | |
| JP6269552B2 (ja) | 車両走行制御装置 | |
| CN111439199B (zh) | 报告装置 | |
| JP2018025993A (ja) | 自動運転システム | |
| US20200189459A1 (en) | Method and system for assessing errant threat detection | |
| JP2015501249A5 (ja) | ||
| JP6896374B2 (ja) | プローブ情報処理サーバ、およびプローブ情報処理方法 | |
| US11377101B2 (en) | Information processing apparatus, information processing method, and vehicle | |
| KR101439019B1 (ko) | 차량 제어 장치 및 그 자율 주행 방법 | |
| KR102591823B1 (ko) | 차량의 충돌 회피 장치 및 그 방법 | |
| JPWO2019181284A1 (ja) | 情報処理装置、移動装置、および方法、並びにプログラム | |
| CN109795500B (zh) | 车辆控制装置、车辆控制方法及存储介质 | |
| JP2019079363A (ja) | 車両制御装置 | |
| JP2017211955A (ja) | 走行支援装置 | |
| US20210122392A1 (en) | Method for operating at least one automated vehicle | |
| US20220253065A1 (en) | Information processing apparatus, information processing method, and information processing program | |
| US20220185278A1 (en) | Information processing apparatus, information processing method, movement control apparatus, and movement control method | |
| JP2023085371A (ja) | 走行記憶システム、および走行記憶方法 | |
| JP2018133085A (ja) | 情報処理装置、情報処理方法、情報処理プログラム、および移動体 | |
| KR20200133853A (ko) | 자율 주행 장치 및 방법 | |
| JP2010108180A (ja) | 運転意思推定装置 | |
| KR101836246B1 (ko) | 현재 차선 추정 방법 | |
| JP2019145016A (ja) | 車両の制御情報を記憶する方法、車載装置及びシステム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20170911 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20170912 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190311 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200115 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200128 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200330 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20201006 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201201 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210511 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210609 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6896374 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |