JP2017142659A - 自律移動体システム - Google Patents
自律移動体システム Download PDFInfo
- Publication number
- JP2017142659A JP2017142659A JP2016023601A JP2016023601A JP2017142659A JP 2017142659 A JP2017142659 A JP 2017142659A JP 2016023601 A JP2016023601 A JP 2016023601A JP 2016023601 A JP2016023601 A JP 2016023601A JP 2017142659 A JP2017142659 A JP 2017142659A
- Authority
- JP
- Japan
- Prior art keywords
- mobile
- moving
- unit
- priority
- moving body
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000001514 detection method Methods 0.000 claims abstract description 107
- 238000004891 communication Methods 0.000 claims abstract description 44
- 238000012545 processing Methods 0.000 claims abstract description 22
- 238000000034 method Methods 0.000 claims description 179
- 238000010295 mobile communication Methods 0.000 claims description 55
- 238000010586 diagram Methods 0.000 description 5
- 230000000717 retained effect Effects 0.000 description 5
- 238000013459 approach Methods 0.000 description 4
- 230000005540 biological transmission Effects 0.000 description 4
- 230000000903 blocking effect Effects 0.000 description 3
- 230000006870 function Effects 0.000 description 2
- 238000009434 installation Methods 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 241001465754 Metazoa Species 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 238000004140 cleaning Methods 0.000 description 1
- 230000000052 comparative effect Effects 0.000 description 1
- 125000004122 cyclic group Chemical group 0.000 description 1
- 230000007257 malfunction Effects 0.000 description 1
- 239000000725 suspension Substances 0.000 description 1
- 230000002123 temporal effect Effects 0.000 description 1
Images









Landscapes
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Abstract
Description
特許文献2のロボット制御装置では、任意の2つの移動ロボット間の距離が、予め求めて設定された第1の所定値であると判定された場合に、優先順位が低い方の移動ロボットの外界センサの出力を低下させている。上記の第1の所定値は、2つの移動ロボットの外界センサの送受信波が干渉しないようなレベルに基づいて算出されている。これにより、各移動ロボットの外界センサによる障害物の誤検知を回避できる。
本発明の一見地に係る自律移動体システムは、移動環境を移動する複数の移動体を含むシステムである。複数の移動体のそれぞれは、自己位置決定部と、障害物検出センサと、移動体間通信部と、距離算出部と、優先度決定部と、干渉停止部と、を有する。自己位置決定部は、自己位置を決定する。自己位置は、移動環境を表す環境地図上での自分自身の位置である。障害物検出センサは、検出信号を出力し、当該検出信号のうち反射されて戻ってきた反射信号を受信する。これにより、障害物検出センサは、周囲に障害物が存在するか否かを検出する。
その後、各移動体の優先度決定部が、近接移動体の移動優先度と自身の移動優先度との高低を決定する。当該決定後、移動優先度が近接移動体よりも低いと決定された移動体の干渉停止部が、干渉停止処理を実行する。すなわち、走行を停止するとともに、当該移動体の障害物検出センサからの検出信号の出力を停止するか、又は、強度を弱くして検出信号を出力する。
この結果、例えば、上記の自律移動体システムを異なる移動環境において使用する場合でも、自律移動体システムを大幅に再構築する必要がなくなる。
これにより、各移動体は、他の移動体が近くに存在しない場合には、通常の走行を実行できる。
これにより、複数の移動体は、共通の副環境地図を共有できる。その結果、移動体間距離の算出を簡単にできる。
これにより、複数の移動体は、共通の副環境地図を共有できる。その結果、移動体間距離の算出を簡単にできる。
これにより、移動環境を自律的に移動中の移動体を優先的に移動できる。
これにより、ユーザにより決められた優先度(すなわち、設定優先度)に従って、複数の移動体は、移動環境を効率的に移動できる。
これにより、個別に割り当てられた移動体識別番号の大小に基づいて、移動優先度を決定できる。
(1)自律移動体システムの全体構成
以下、本実施形態に係る自律移動体システム100の構成について、図1を用いて説明する。図1は、自律移動体システムの構成を示す図である。自律移動体システム100は、複数の移動体1−1、1−2、・・・1−5を含む。複数の移動体1−1、1−2、・・・1−5は、互いに協調しながら移動環境ME(例えば、ホテルや空港のロビーなど多くの人が存在する環境)を移動する、例えば広告宣伝ロボットである。
なお、図1に示す自律移動体システム100において、移動体1−1、1−2、・・・1−5の台数は5台であるが、数は限定されない。
以下、自律移動体システム100に含まれる移動体1−1、1−2、・・・1−5について説明する。本実施形態の移動体1−1、1−2、・・・1−5は、例えば、ユーザにより教示された経路を再現しながら、自律して走行可能な移動体である。
まず、この移動体1−1、1−2、・・・1−5の構成について、図2を用いて説明する。図2は、移動体の構成を示す図である。以下では、移動体1−1を例にとって、移動体の構成を説明する。なお、移動体1−2、1−3、1−4、1−5も、移動体1−1と同様の構成を有する。
移動体1−1が広告宣伝ロボットの場合には、本体部11は、例えば、宣伝を視覚的に示すディスプレイや、宣伝を音声として発するスピーカーなどを備えている。
具体的には、移動部12は、一対のモータ121a、121bを有する。一対のモータ121a、121bは、本体部11の底部に設けられた、例えばサーボモータやブラシレスモータなどの電動モータである。一対のモータ121a、121bは、制御部16(後述)と電気的に接続され、制御部16からの指令に基づいて、それぞれ独立に、任意の回転数及びトルクにてその出力回転軸を回転させる。
上記のように独立回転が可能なことによって、主輪123aと123bの回転数に差を生じさせて本体部11の姿勢を変化できる。一方、一対の主輪123a、123bの回転数が同じであれば、本体部11を直進できる。
ば、レーザ発振器によりパルス発振されたレーザ光を、移動環境ME中の構造物O(例えば、移動環境MEに配置された柱や棚など)(図1)や壁W(図1)に放射状に照射し、当該構造物O及び/または壁Wから反射した反射光をレーザ受信器により受信することにより、当該構造物Oや壁Wに関する情報を取得するレーザレンジファインダ(LRF:Laser Range Finder)である。本実施形態において、レーザレンジセンサ13は、本体部11の前部に配置された第1レーザレンジセンサ131と、本体部11の後部に配置された第2レーザレンジセンサ133と、を有する。
一方、第2レーザレンジセンサ133は、本体部11の後方に左右方向にレーザ光を放射状に発生することにより、第2レーザレンジセンサ133を中心とした本体部11の後方の半径5m程度の円内に含まれる構造物Oや壁Wに関する情報を取得する。第2レーザレンジセンサ133は、取得した構造物Oや壁Wに関する情報を、制御部16に出力する。
なお、上記レーザレンジセンサの検出可能距離は、上記の値に限られず、自律移動体システム100の用途等に応じて適宜変更できる。
その他、障害物検出センサ15として、例えば、レーザレンジファインダ(Laser Range Finder、LRF)を用いてもよい。
第1障害物検出センサ151は、本体部11の前方に超音波信号を出力し、本体部11の前方に存在する障害物にて反射された超音波信号を受信する。一方、第2障害物検出センサ153は、本体部11の後方に超音波信号を出力し、本体部11の後方に存在する障害物にて反射された超音波信号を受信する。受信された超音波信号は、制御部16へと出力される。
なお、本実施形態においては、障害物検出センサの数及び位置は特に限定されない。例えば、本体部11を前方方向のみに移動させたい場合には、第2障害物検出センサ153を省略してもよい。
次に、移動体1−1を制御する制御部16の構成について図3を用いて説明する。図3は、制御部の構成を示す図である。制御部16は、CPU(Central Processing Unit)、ハードディスク装置、ROM(Read Only Memory)、RAM(Random Access Memory)、記憶媒体読み出し装置などの記憶装置、信号変換を行うインターフェースなどを備えたマイコンシステムなどにより実現できる。
また、制御部16の各部の機能の一部又は全部は、プログラムとして実現されていてもよい。さらに、当該プログラムは、マイコンボードの記憶装置に記憶されていてもよい。又は、上記機能の一部又は全部は、カスタムICなどにより実現されていてもよい。
具体的には、記憶部161には、副環境地図が記憶されている。副環境地図は、例えば、移動環境MEを表す座標平面上の構造物O及び/または壁Wの位置を示す座標値データの集合体であり、移動環境MEの少なくとも一部を表す地図である。従って、移動環境MEを表す環境地図は、典型的には、複数の副環境地図により構成できる。
一方、他移動体情報は、他の移動体1−2、1−3、1−4、1−5のそれぞれに関する情報であり、例えば、他の移動体のそれぞれの動作モードフラグと、走行フラグと、干渉停止処理実行フラグと、他の移動体のそれぞれの現在の自己位置を示す座標値及び姿勢角(「他移動体位置」と呼ぶことにする)と、他の移動体のそれぞれが現在移動中の副環境地図の地図識別番号と、他の移動体のそれぞれの移動体識別番号と、他の移動体のそれぞれに設定された設定優先度と、を含む。
また、記憶部161には、さらに、移動体1−1が自律的に走行する経路を示す走行スケジュールが記憶されていてもよい。
なお、上記の複数の位置と推定角の「候補」のそれぞれには、本体部11が当該各「候補」の位置及び姿勢角のそれぞれに到達する確率を関連づけておいてもよい。
なお、複数の位置と姿勢角の「候補」に本体部11が当該各「候補」の位置及び姿勢角に到達する確率を関連づけた場合には、ローカルマップと副環境地図(あるいは合体地図)とが比較的よくマッチングしたいくつかの位置及び姿勢角の「候補」のうち、上記の確率が最大のものを現在の最終的な位置及び姿勢角と推定してもよい。
自己位置を他の移動体と同一の副環境地図を用いて決定するために、後述するように、本実施形態に係る自律移動体システム100においては、複数の移動体1−1、1−2、・・・1−5の間で、各移動体1−1、1−2、・・・1−5が保有する副環境地図が共有される。
これにより、走行制御部164は、自律モードの実行時においては、本体部11を、上記の走行スケジュールに従って、自律的に移動できる。
また、走行制御部164は、記憶部161に記憶されている動作モードフラグを、実行中の動作モードに従って変化させる。例えば、自律モードを実行中の場合には、走行制御部164は、動作モードフラグをONとする。一方、手動モードを実行中の場合には、走行制御部164は、動作モードフラグをOFFとする。
具体的には、障害物検出部165は、移動環境MEを移動中に、障害物検出センサ15に対して超音波信号の出力を指令し、反射などにより障害物検出センサ15に戻ってきた当該超音波信号を受信する。障害物検出部165は、超音波信号の出力を指令したタイミングと、反射などにより障害物検出センサ15に戻ってきた超音波信号を受信したタイミングとの時間差から、障害物検出センサ15から障害物までの距離を算出する。
本実施形態において、障害物検出部165は、障害物検出センサ15から障害物までの距離が所定の距離以下であり、本体部11の近辺に障害物が存在すると判断したら、走行制御部164に対して、本体部11の移動を停止するよう指令する。これにより、移動体1−1は、障害物と衝突する前に、安全に停止できる。
これにより、移動体間通信部166は、移動体間通信が可能な移動体間で情報を共有できる。移動体間通信部166による移動体間での情報の共有については、後ほど詳しく説明する。
上記のような移動体間通信の不調は、一般的に、本体部11と他の移動体との間の距離が無線通信できない程度に離れている(この距離は、一般的に、干渉距離よりも大きい)場合に頻発する。従って、移動体間通信が不調である場合には、本体部11と他の移動体との間の距離が干渉距離よりも大きいと判断し、近接移動体は存在しないと決定できる。
具体的には、走行スケジュール作成部1610は、ユーザの操作により移動体1−1を移動中に、所定の時間間隔毎に、自己位置決定部163において決定された自己位置を入力する。その後、走行スケジュール作成部1610は、入力した自己位置と、当該自己位置を決定した時刻とを関連づけて走行スケジュールを作成し、当該走行スケジュールを記憶部161に記憶する。走行スケジュール作成部1610は、自己位置を決定した時刻におけるユーザの操作の操作量を受け付けて、当該操作量を当該時刻と関連付けて走行スケジュールに記憶してもよい。
具体的には、例えば、走行スケジュール作成部1610は、ユーザにより副環境地図の作成指令(上記の指定位置の指定)がなされたときに、レーザレンジセンサ制御部162に対して、指定位置に対する移動環境ME上の構造物O及び/または壁Wの相対位置を示す座標値データを取得するよう指令し、レーザレンジセンサ制御部162にて取得した当該座標値データを用いて、副環境地図を作成する。
その後、走行スケジュール作成部1610は、現在使用されていない地図識別番号に作成した副環境地図を割り当て、作成した副環境地図から地図内容情報を生成し、割り当てた地図識別番号と生成した地図内容情報とを関連付けて、保有地図情報に記憶する。
以下、近接移動体が存在するか否かを決定する際に用いられる干渉距離の決定方法について説明する。干渉距離は、以下のようにして、実際に誤検知がなされる距離を測定することにより、実験的に決定される。
具体的には、障害物検出部165は、障害物検出センサ15から超音波信号を出力してから時間t1が経過するまでは、信号強度がs1以上である超音波信号を障害物検出センサ15が受信した時に、障害物が存在すると判断する。
以降、時間t1から時間t2までは、信号強度がs2以上である超音波信号を障害物検出センサ15が受信した時に、障害物が存在すると判断する。また、時間t2から時間t3までは、信号強度がs3以上である超音波信号を障害物検出センサ15が受信した時に、障害物が存在すると判断する。さらに、時間t3以降は、信号強度がs4以上である超音波信号を障害物検出センサ15が受信した時に、障害物が存在すると判断する。
当該測定結果を、2つのセンサ間の距離を横軸とし、他方の障害物検出センサにて検出された信号強度を縦軸とした座標上にプロットすると、例えば、図5の実線にて示す関係が得られる。図5は、2つのセンサ間距離と検出された信号強度との関係の一例を示す図である。
干渉距離を算出する際に、障害物検出センサ15の設置位置と本体部11の中心位置との間の距離の2倍の値を干渉基準距離に加える理由は、自己位置及び他移動体位置が本体部の中心位置の座標値として定義されているためである。
(5−1)移動体の移動動作
以下、自律移動体システム100における移動体の移動動作を説明する。以下においては、移動体1−1の移動動作を例にとって説明する。
移動体1−1の電源をオンにして移動体1−1を起動すると、ユーザは、例えば、本体部11に設けられた切替スイッチ(例えば、電気スイッチ、タッチパネルなど)、又は、移動体1−1を操作するコントローラを操作して、移動体1−1の動作モードを手動モードとするか自律モードとするか切り替える。
走行制御部164は、動作モードとして自律モードが選択された場合には移動体情報の動作モードフラグをONに、手動モードが選択された場合には動作モードフラグをOFFに更新する。
一方、手動モードの実行中には、移動体1−1は、無線又は有線にて移動体1−1と通信可能なコントローラ又はコンピュータシステム、又は、移動体1−3に設けられた操作ハンドルからのユーザによる操作を受け付ける。この結果、移動体1−1は、ユーザの操作により、移動環境MEを移動する。
以下、移動環境MEの移動中に実行される他の移動体との情報共有処理について、図6を用いて説明する。図6は、他の移動体との情報共有処理の流れを示すフローチャートである。
情報共有処理を開始すると、移動体間通信部166は、通信可能移動体(以下、通信可能移動体と呼ぶことがある)が存在するか否かを判断する(ステップS11)。具体的には、例えば、移動体間通信部166が、他の移動体の移動体間通信部を認識できる場合には、通信可能移動体が存在すると判断する。なお、情報共有処理を実行中に移動体間通信の通信エラーが発生した場合には、他の移動体の移動体間通信部との通信を停止する。
一方、通信可能移動体が存在すると判断した場合(ステップS11において「Yes」の場合)、移動体間通信部166は、現在記憶部161に記憶されている移動体情報を、通信可能移動体のそれぞれに送信する(ステップS12)。当該送信された移動体情報を受信した他の移動体の移動体間通信部は、受信した移動体情報を、他の移動体における他移動体情報として、当該他の移動体の記憶部に記憶する。これにより、移動体1−1に関する情報が、他の移動体と共有される。
具体的には、まず、移動体間通信部166は、通信可能移動体の記憶部に現在記憶されている保有地図情報を、当該他の移動体から受信する。次に、移動体間通信部166は、記憶部161に記憶されている保有地図情報に含まれる地図内容情報と一致しない地図内容情報が、受信した他の移動体の保有地図情報に含まれている場合に、非保有地図を他の移動体が保有していると判断する。
具体的には、移動体間通信部166は、まず、他の移動体の保有地図情報において上記の非保有地図と関連付けられている地図識別番号を、当該他の移動体へ送信する。当該地図識別番号を受信した他の移動体の移動体間通信部は、当該受信した地図識別番号に関連付けられた副環境地図を、移動体間通信部166へ送信する。
なお、移動体間通信のタイミングによっては、他の移動体へ非保有地図の地図識別番号を送信することなく、通信可能移動体から、受信希望の非保有地図が送信されてくる場合もある。
これにより、記憶部161に記憶されていなかった副環境地図(非保有地図)が、他の移動体と共有される。
具体的には、移動体間通信部166は、記憶部161に記憶されている保有地図情報に含まれる地図内容情報と一致する地図内容情報が、上記のステップS14にて他の移動体から受信した保有地図情報に含まれていない場合に、保有地図を当該他の移動体が保有していないと判断する。
なお、移動体間通信のタイミングによっては、他の移動体が保有していない保有地図が存在するか否かの判断の完了前に、他の移動体から当該他の移動体に送信すべき保有地図の地図識別番号が送信されてくる場合もある。このような場合にも、移動体間通信部166は、保有地図を通信可能移動体が保有していないと判断する。
具体的には、移動体間通信部166は、まず、記憶部161に記憶されている保有地図情報に含まれるが、他の移動体から受信した保有地図情報には含まれていない地図内容情報に関連付けられている地図識別番号を特定する。なお、他の移動体から送信希望の地図識別番号を受信した場合には、送信したい保有地図の地図識別番号を特定する処理は必要ない。
次に、移動体間通信部166は、上記のように特定した地図識別番号又は他の移動体から受信した地図識別番号に割り当てられた副環境地図(保有地図)を、当該特定した保有地図を送信すべき他の移動体、又は、当該送信希望の地図識別番号を送信してきた他の移動体へと送信する。
これにより、記憶部161に記憶されていた副環境地図(保有地図)が、他の移動体と共有される。
情報共有処理を停止しないと判断した場合(ステップS18において「No」の場合)、情報共有処理は、ステップS11に戻る。すなわち、情報共有処理は継続される。
一方、情報共有処理を停止すると判断した場合(ステップS18において「Yes」の場合)、移動体間通信部166は、情報共有処理を停止する。
なお、移動体1−1の記憶部161に記憶されている情報を基準として他の移動体1−2、1−3、1−4、1−5の情報を更新又は追加することにより情報を共有するか、その逆に、他の移動体1−2、1−3、1−4、1−5のいずれかの記憶部に記憶されている情報を基準として移動体1−1の情報を更新又は追加することにより情報を共有するかは、移動体間通信の開始タイミング(例えば、どの移動体がより早く移動体間通信を開始したかなど)などにより、適宜決定できる。
次に、移動環境MEの移動中に移動体1−1における干渉停止処理の実行を決定する処理(以下、決定処理と呼ぶことがある)について、図7を用いて説明する。図7は、干渉停止処理を実行するか否かを決定する処理の流れを示すフローチャートである。
一方、例えば、干渉停止処理実行フラグがONであり、移動体1−1において干渉停止処理が現在実行中であると判断した場合(ステップS1において「Yes」の場合)、決定処理は、ステップS7に進む。すなわち、現在実行中の干渉停止処理を解除すべきか否かを決定して、解除すべきと判断された場合には、干渉停止処理を停止する。
一方、例えば、動作モードフラグがOFFであり、移動体1−1が手動モードを実行中であると判断した場合(ステップS2において「手動」の場合)、決定処理は、ステップS4に進む。すなわち、制御部16は、手動モード実行中において干渉停止処理を実行するか否かを決定する。この処理を、以下、「第2停止チェック処理」と呼ぶことにする。
なお、上記の第1停止チェック処理及び第2停止チェック処理については、後ほど詳しく説明する。
具体的には、干渉停止部169は、走行制御部164に対して本体部11の移動を停止するよう指令することと(手動モードの実行中においては、走行制御部164に対してユーザによる操作を受け付けないよう指令する)、障害物検出部165に対して障害物検出センサ15からの超音波信号の出力を停止するか、又は、超音波信号の強度を弱くして出力する(例えば、信号強度を上記の信号強度s1よりも小さくして出力する)よう指令する。
また、干渉停止部169は、本体部11に設けられたLEDランプ(図示せず)を点灯させる。
干渉停止処理を実行後、決定処理は、ステップS10に進む。
ステップS7において現在実行中の干渉停止処理を解除しないと判断した場合(ステップS8において「No」の場合)、決定処理は、ステップS1に戻る。すなわち、干渉停止部169は、現在実行中の干渉停止処理を継続する。
具体的には、干渉停止部169は、走行制御部164に対して本体部11の移動を再開するよう指令し(手動モードの実行中においては、走行制御部164に対してユーザによる操作を受け付けるよう指令する)、障害物検出部165に対して障害物検出センサ15から通常の強度を有する超音波信号を出力するよう指令する。また、干渉停止部169は、本体部11に設けられたLEDランプを消灯する。
一方、決定処理を終了すると判断した場合(ステップS10において「Yes」の場合)、決定処理は終了する。
この結果、各移動体1−1、1−2、・・・1−3は、外部の制御システムにより統括的に制御されることなく、自律的に協調して移動環境MEを移動できる。
次に、上記のステップS3において実行される第1停止チェック処理について、図8を用いて説明する。図8は、第1停止チェック処理の流れを示すフローチャートである。
上記のステップS2において実行中の動作モードが自律モードと判断され、第1停止チェック処理が開始されると、干渉停止部169は、通信可能移動体が存在しているか否かを判断する(ステップS3−1)。干渉停止部169は、例えば、移動体間通信部166において他の移動体の移動体間通信部が全く認識できないか、又は、他の移動体の移動体間通信部との間の移動体間通信に通信エラーが発生している場合に、通信可能移動体が存在しないと判断する。
一方、通信可能移動体が存在している場合(ステップS3−1において「Yes」の場合)、当該通信可能移動体の中に近接移動体が存在する可能性があるので、干渉停止部169は、通信可能移動体の中に近接移動体が存在するか否かを判断する(ステップS3−2)。
一方、移動体間距離が上記の干渉距離未満である他の移動体が存在する場合(ステップS3−2において「Yes」の場合)、干渉停止部169は、近接移動体が存在すると判断する。干渉停止部169は、近接移動体である他の移動体(例えば、近接移動体の移動体識別番号)を特定後、優先度決定部168に対して、移動体1−1の移動優先度と近接移動体の移動優先度との比較結果を通知するよう指令する。
比較対象の近接移動体の他移動体情報に含まれる動作モードフラグがOFFであり、比較対象の近接移動体が手動モードを実行中であると判断した場合(ステップS3−3において「No」の場合)、優先度決定部168は、移動体1−1の移動優先度が比較対象の近接移動体の移動優先度よりも高いと決定し、第1停止チェック処理は、ステップS3−10に進む。
優先度決定部168は、例えば、移動体情報の走行フラグを参照して、移動体1−1の走行状態を決定する。一方、近接移動体の走行状態は、例えば、近接移動体の他移動体情報の走行フラグと干渉停止処理実行フラグとを参照することにより決定される。
一方、移動体1−1の移動体情報において走行フラグの情報のみを参照すればよい理由は、第1停止チェック処理を実行していることは、移動体1−1が干渉停止処理を実行していないことを意味しているからである。
一方、移動体1−1が通過中の通路の幅が、比較対象の近接移動体が通過中の通路の幅よりも広い場合(ステップS3−7において「広」の場合)、優先度決定部168は、移動体1−1の移動優先度が比較対象の近接移動体の移動優先度よりも低いと決定し、当該結果を干渉停止部169へ通知する。当該通知をうけた干渉停止部169は、干渉停止処理を実行すると判断し(ステップS3−11)、第1停止チェック処理を終了する。
優先度決定部168は、移動体情報及び近接移動体の他移動体情報を参照することにより、移動体1−1及び近接移動体の設定優先度を取得できる。
一方、移動体1−1の設定優先度が、比較対象の近接移動体の設定優先度よりも低い場合(ステップS3−8において「低」の場合)、優先度決定部168は、移動体1−1の移動優先度が比較対象の近接移動体の移動優先度よりも低いと決定し、当該結果を干渉停止部169へ通知する。当該通知をうけた干渉停止部169は、干渉停止処理を実行すると判断し(ステップS3−11)、第1停止チェック処理を終了する。
これにより、ユーザにより決められた設定優先度がより高い移動体を優先的に移動させて、複数の移動体1−1、1−2、・・・1−5は、移動環境MEを効率的に移動できる。
なお、複数の移動体1−1、1−2、・・・1−5において設定優先度が設定されていない場合にも、優先度決定部168は、設定優先度では移動優先度を決定できないと判断する。
優先度決定部168は、移動体情報及び近接移動体の他移動体情報を参照することにより、移動体1−1及び近接移動体の移動体識別番号を取得できる。
一方、移動体1−1の移動体識別番号が、比較対象の近接移動体の移動体識別番号よりも大きい場合(ステップS3−9において「Yes」の場合)、優先度決定部168は、移動体1−1の移動優先度が比較対象の近接移動体の移動優先度よりも低いと決定し、当該結果を干渉停止部169へ通知する。当該通知をうけた干渉停止部169は、干渉停止処理を実行すると判断し(ステップS3−11)、第1停止チェック処理を終了する。
これにより、個別に割り当てられた移動体識別番号がより小さい移動体を優先的に移動できる。
一方、移動優先度の判定を全ての近接移動体に対して実行した場合(ステップS3−10において「Yes」の場合)、優先度決定部168は、移動体1−1の移動優先度がどの近接移動体よりも高いと判定し、当該結果を干渉停止部169へ通知する。当該通知をうけた干渉停止部169は、干渉停止処理を実行しないと判断し(ステップS3−12)、第1停止チェック処理を終了する。
次に、上記のステップS4において実行される第2停止チェック処理について、図9を用いて説明する。図9は、第2停止チェック処理の流れを示すフローチャートである。
上記のステップS2において実行中の動作モードが手動モードと判断され、第2停止チェック処理が開始されると、干渉停止部169は、通信可能移動体が存在しているか否かを判断する(ステップS4−1)。
一方、通信可能移動体が存在している場合(ステップS4−1において「Yes」の場合)、当該通信可能移動体の中に近接移動体が存在する可能性があるので、干渉停止部169は、通信可能移動体の中に近接移動体が存在するか否かを判断する(ステップS4−2)。
一方、移動体間距離が干渉距離未満である他の移動体が存在する場合(ステップS4−2において「Yes」の場合)、干渉停止部169は、近接移動体が存在すると判断する。この場合、干渉停止部169は、近接移動体の移動体識別番号を特定後、優先度決定部168に対して、移動優先度同士の比較結果を通知するよう指令する。
なお、以下に説明する移動優先度の高低の決定は、上記の第1停止チェック処理と同様に、近接移動体毎の移動優先度の比較を、特定された全ての近接移動体分だけ繰り返し実行することにより行われる。
比較対象の近接移動体の動作モードフラグがONであり、当該比較対象の近接移動体が自律モードを実行中であると判断した場合(ステップS4−3において「No」の場合)、優先度決定部168は、移動体1−1の移動優先度が比較対象の近接移動体の移動優先度よりも低いと決定し、当該結果を干渉停止部169に通知する。当該通知をうけた干渉停止部169は、干渉停止処理を実行すると判断し(ステップS4−11)、第2停止チェック処理を終了する。これにより、自律モードを実行中の近接移動体を優先的に移動できる。
移動体情報の走行フラグがOFF(移動体1−1が一時停止中)、かつ、比較対象の近接移動体の他移動体情報の走行フラグがON(比較対象の近接移動体が手動モードにて走行中)の場合(ステップS4−4において「Yes」であり、かつ、ステップS4−5において「No」の場合)、優先度決定部168は、移動体1−1の移動優先度が比較対象の近接移動体の移動優先度よりも低いと決定し、当該結果を干渉停止部169へ通知する。当該通知をうけた干渉停止部169は、干渉停止処理を実行すると判断し(ステップS4−11)、第2停止チェック処理を終了する。これにより、現在移動中の近接移動体を優先的に移動できる。
一方、移動体1−1の設定優先度が、比較対象の近接移動体の設定優先度よりも低い場合(ステップS4−7において「低」の場合)、優先度決定部168は、移動体1−1の移動優先度が比較対象の近接移動体に移動優先度よりも低いと決定し、当該結果を干渉停止部169へ通知する。当該通知をうけた干渉停止部169は、干渉停止処理を実行すると判断し(ステップS4−11)、第2停止チェック処理を終了する。
これにより、ユーザにより決められた設定優先度が高い移動体を優先的に移動させて、複数の移動体1−1、1−2、・・・1−5は、移動環境MEを効率的に移動できる。
なお、複数の移動体1−1、1−2、・・・1−5において設定優先度が設定されていない場合にも、優先度決定部168は、設定優先度では移動優先度を決定できないと判断する。
一方、移動体1−1の移動体識別番号が、比較対象の近接移動体の移動体識別番号よりも大きい場合(ステップS4−8において「Yes」の場合)、優先度決定部168は、移動体1−1の移動優先度が比較対象の近接移動体の移動優先度よりも低いと決定し、当該結果を干渉停止部169へ通知する。当該通知をうけた干渉停止部169は、干渉停止処理を実行すると判断し(ステップS4−11)、第2停止チェック処理を終了する。
これにより、個別に割り当てられた移動体識別番号が小さい移動体を優先的に移動できる。
一方、移動優先度の判定を全ての近接移動体に対して実行した場合(ステップS4−9において「Yes」の場合)、優先度決定部168は、移動体1−1の移動優先度がどの近接移動体よりも高いと判定し、当該結果を干渉停止部169へ通知する。当該通知をうけた干渉停止部169は、干渉停止処理を実行しないと判断し(ステップS4−10)、第2停止チェック処理を終了する。
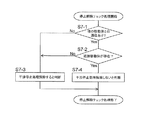
次に、上記のステップS7において実行される停止解除チェック処理について、図10を用いて説明する。図10は、停止解除チェック処理の流れを示すフローチャートである。
上記のステップS1において干渉停止処理を実行中と判断され、停止解除チェック処理が開始されると、干渉停止部169は、通信可能移動体が存在しているか否かを判断する(ステップS7−1)。
一方、通信可能移動体が存在している場合(ステップS7−1において「Yes」の場合)、当該通信可能移動体の中に近接移動体が存在する可能性があるので、干渉停止部169は、通信可能移動体の中に近接移動体が存在するか否かを判断する(ステップS7−2)。
一方、移動体間距離が干渉距離未満である他の移動体が存在する場合(ステップS7−2において「Yes」の場合)、干渉停止部169は、近接移動体が存在すると判断し、干渉停止処理を解除せず継続すると判断する(ステップS7−4)。その後、停止解除チェック処理を終了する。
以上、本発明の一実施形態について説明したが、本発明は上記実施形態に限定されるものではなく、発明の要旨を逸脱しない範囲で種々の変更が可能である。特に、本明細書に書かれた複数の実施形態及び変形例は必要に応じて任意に組み合せ可能である。
(A)移動優先度を決定する処理の順番についての他の実施形態
上記の第1実施形態における第1停止チェック処理及び第2停止チェック処理では、(i)近接移動体の存在又は不存在に基づく判断、(ii)実行中の動作モードに基づく判断、(iii)現在の走行状態に基づく判断、(iv)通路幅に基づく判断(第1停止チェック処理のみ)、(v)設定優先度に基づく判断、(vi)移動体識別番号に基づく判断、の順番で移動優先度の高低を決定していた。
しかし、移動優先度の高低の決定のための判断は、上記の順番(特に、上記の(ii)〜(vi)の順番)に限られず、どの基準をより優先するかにより(例えば、優先する基準を停止チェック処理のより早い段階に配置する)、適宜順番を変更できる。
上記の第1実施形態において、障害物検出部165は、超音波信号が出力されて時間t1までに信号強度がs1以上である(障害物検出センサ15から出力され障害物にて反射された)超音波信号が受信されたときに、本体部11の近辺に障害物が存在すると判断して、本体部11の移動を停止していた。すなわち、第1実施形態の障害物検出部165は、比較的狭い範囲の障害物の有無のみを検出していた。しかし、これに限られず、障害物検出部165は、より広い範囲の障害物の検出を行ってもよい。
上記の(I)及び(II)までの基準を用いる場合には、干渉基準距離は、図5に示す2つのセンサ間の距離と検出された信号強度との関係を示したプロットにおいて、他方の障害物検出センサにて検出された超音波信号の信号値がs3となったときの2つのセンサ間の距離とできる。この場合、干渉停止処理において障害物検出センサ15から出力される超音波信号の強度はs3以下とする。
上記の(I)〜(III)までの基準を用いる場合には、干渉基準距離は、図5に示す2つのセンサ間の距離と検出された信号強度との関係を示したプロットにおいて、他方の障害物検出センサにて検出された超音波信号の信号値がs4となったときの2つのセンサ間の距離とできる。この場合、干渉停止処理において障害物検出センサ15から出力される超音波信号の強度はs4以下とする。
これにより、移動体1−1は、例えば、本体部11と障害物との距離が十分離れている場合には、障害物が移動体1−1の移動経路から外れるまで、ゆっくり移動しながら待機できる。
上記(B)のように、障害物検出部165が広い範囲の障害物の検出を行う場合には、移動体1−1、1−2、・・・1−5は、各移動体が移動中の領域の広さを表す指標を、移動体情報に含めて、各移動体にて共有してもよい。
この場合、移動中の領域の広さに応じて、障害物検出部165が本体部11の近辺に障害物が存在すると判断する際の信号強度の検出閾値を変化させてもよい。例えば、移動中の領域の広さが広い場合に、検出閾値を大きくするとともに干渉距離を大きくすることにより、移動体1−1、1−2、・・・1−5は、広い領域を高速に移動できる。
さらにこの場合には、移動体情報(他移動体情報)に含まれている領域の広さを表す指標と干渉距離とが同一である移動体同士にて、上記の移動優先度の比較を実行してもよい。これにより、移動体1−1、1−2、・・・1−5が高速に移動していても、障害物検出部165の誤検知を回避できる。
上記の第1実施形態において、複数の移動体1−1、1−2、・・・1−5の例として、ホテルや空港のロビーなど多くの人が存在する環境を移動する広告宣伝ロボットが挙げられていた。しかし、上記の移動体は、広告宣伝ロボット以外にも、様々な移動体やロボットなどに応用できる。例えば、移動体1−1、1−2、・・・1−5を、移動環境を自律的に移動し清掃する自律清掃ロボットとして用いてもよい。
さらに、上記の第1実施形態の制御部16(及び、必要に応じてレーザレンジセンサや超音波センサなどを付属させてもよい)を、汎用の移動体の制御を行うための移動体制御モジュールとして用いてもよい。
1−1、1−2、1−3、1−4、1−5 移動体
11 本体部
12 移動部
121a、121b モータ
123a、123b 主輪
125a、125b エンコーダ
13 レーザレンジセンサ
131 第1レーザレンジセンサ
133 第2レーザレンジセンサ
14 移動体間通信アンテナ
15 障害物検出センサ
151 第1障害物検出センサ
153 第2障害物検出センサ
16 制御部
161 記憶部
162 レーザレンジセンサ制御部
163 自己位置決定部
164 走行制御部
165 障害物検出部
166 移動体間通信部
167 距離算出部
168 優先度決定部
169 干渉停止部
1610 走行スケジュール作成部
17 補助輪部
17a、17b補助車輪
ME 移動環境
O 構造物
W 壁
Claims (8)
- 移動環境を移動する複数の移動体を含む自律移動体システムであって、
前記複数の移動体のそれぞれは、
前記移動環境を表す環境地図上での自己位置を決定する自己位置決定部と、
検出信号を出力し、当該検出信号のうち反射されて戻ってきた反射信号を受信することにより、自身の周囲に障害物が存在するか否かを検出する障害物検出センサと、
他の移動体と互いに直接通信する移動体間通信により、前記自己位置を前記他の移動体に送信するとともに、前記他の移動体の前記環境地図上の位置である他移動体位置を前記他の移動体のそれぞれから受信する、移動体間通信部と、
前記自己位置と前記他移動体位置との間の移動体間距離を算出する距離算出部と、
前記移動体間距離が干渉距離未満である近接移動体との間の移動に関する移動優先度を決定する優先度決定部と、
前記近接移動体よりも前記移動優先度が低いと決定されたら、自身の移動を停止するとともに、前記障害物検出センサからの前記検出信号の出力を停止するか、又は、前記検出信号の強度を弱くして出力する干渉停止処理を実行する干渉停止部と、
を有する、自律移動体システム。 - 前記移動体間通信が不調であるか、又は、前記近接移動体が存在しないと判断したら、前記干渉停止部は、前記干渉停止処理を解除する、請求項1に記載の自律移動体システム。
- 前記環境地図は、前記移動環境の少なくとも一部を表す副環境地図により構成され、
自身が所有していない前記副環境地図である非保有地図を前記他の移動体が所有していると判断したら、前記移動体間通信部は、当該他の移動体から前記非保有地図を受信する、請求項1又は2に記載の自律移動体システム。 - 自身が所有している前記副環境地図である保有地図を前記他の移動体が所有していないと判断したら、前記移動体間通信部は、前記保有地図を当該他の移動体に送信する、請求項3に記載の自律移動体システム。
- 前記複数の移動体のそれぞれは、前記移動環境を自律的に移動する自律モード、又は、前記移動環境をユーザの操作により移動する手動モードのいずれかを実行可能であり、
優先度決定部は、前記手動モードを実行中の移動体の前記移動優先度を、前記自律モードを実行中の移動体の前記移動優先度よりも低いと決定する、
請求項1〜4のいずれかに記載の自律移動体システム。 - 前記優先度決定部は、一時停止中である移動体の前記移動優先度を、走行中である移動体の前記移動優先度よりも低いと決定する、請求項1〜5のいずれかに記載の自律移動体システム。
- 前記複数の移動体のそれぞれには、ユーザにより個別に設定された設定優先度が割り当てられており、
前記優先度決定部は、前記設定優先度の高低に従って前記移動優先度を決定する、請求項1〜6のいずれかに記載の自律移動体システム。 - 前記複数の移動体のそれぞれには、個別に移動体識別番号が割り当てられており、
前記優先度決定部は、前記移動体識別番号の大小に従って前記移動優先度を決定する、請求項1〜7のいずれかに記載の自律移動体システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016023601A JP6880552B2 (ja) | 2016-02-10 | 2016-02-10 | 自律移動体システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016023601A JP6880552B2 (ja) | 2016-02-10 | 2016-02-10 | 自律移動体システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017142659A true JP2017142659A (ja) | 2017-08-17 |
| JP6880552B2 JP6880552B2 (ja) | 2021-06-02 |
Family
ID=59629121
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016023601A Active JP6880552B2 (ja) | 2016-02-10 | 2016-02-10 | 自律移動体システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6880552B2 (ja) |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019121365A (ja) * | 2018-01-05 | 2019-07-22 | アイロボット・コーポレーション | モバイル清掃ロボットの協同および永続マッピング |
| JP2019128743A (ja) * | 2018-01-23 | 2019-08-01 | パナソニックIpマネジメント株式会社 | 移動装置、移動システム、移動装置の制御方法、及びプログラム |
| WO2019181899A1 (ja) * | 2018-03-19 | 2019-09-26 | 本田技研工業株式会社 | 管理システム及びその制御方法並びに管理サーバ |
| CN110320524A (zh) * | 2018-03-28 | 2019-10-11 | 北醒(北京)光子科技有限公司 | 一种多台光测距装置协同测距方法及系统 |
| JP2019198346A (ja) * | 2018-05-14 | 2019-11-21 | 日立グローバルライフソリューションズ株式会社 | 床面に沿って移動する移動体を含む移動体システム |
| JP2019219735A (ja) * | 2018-06-15 | 2019-12-26 | トヨタ自動車株式会社 | 自律移動体、および自律移動体の制御プログラム |
| JPWO2020235392A1 (ja) * | 2019-05-17 | 2020-11-26 | ||
| WO2021024726A1 (ja) * | 2019-08-07 | 2021-02-11 | パナソニックIpマネジメント株式会社 | 制御システム、制御方法、及びプログラム |
| JPWO2019215838A1 (ja) * | 2018-05-09 | 2021-04-22 | 日本電気株式会社 | 自律動作機の制御装置、自律動作機の制御方法、及び、自律動作機の制御プログラム |
| US11320831B2 (en) | 2018-01-23 | 2022-05-03 | Panasonic Intellectual Property Management Co., Ltd. | Mover, mover control system, method of detecting object by mover, moving system, and method of controlling mover |
| CN115043272A (zh) * | 2021-03-09 | 2022-09-13 | 三菱电机株式会社 | 管制系统和移动体 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7567639B2 (ja) * | 2021-04-21 | 2024-10-16 | トヨタ自動車株式会社 | ロボット制御システム、ロボット制御方法、及び、制御プログラム |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0498406A (ja) * | 1990-08-10 | 1992-03-31 | Nissan Motor Co Ltd | 無人搬送車の走行制御装置 |
| JPH05158533A (ja) * | 1991-11-26 | 1993-06-25 | Internatl Business Mach Corp <Ibm> | 能動型センサを備えた移動機械 |
| JP2001212782A (ja) * | 2000-01-31 | 2001-08-07 | Sony Corp | ロボット装置及びロボット装置の制御方法 |
| JP2006113687A (ja) * | 2004-10-12 | 2006-04-27 | Matsushita Electric Works Ltd | 自律移動システム |
-
2016
- 2016-02-10 JP JP2016023601A patent/JP6880552B2/ja active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0498406A (ja) * | 1990-08-10 | 1992-03-31 | Nissan Motor Co Ltd | 無人搬送車の走行制御装置 |
| JPH05158533A (ja) * | 1991-11-26 | 1993-06-25 | Internatl Business Mach Corp <Ibm> | 能動型センサを備えた移動機械 |
| JP2001212782A (ja) * | 2000-01-31 | 2001-08-07 | Sony Corp | ロボット装置及びロボット装置の制御方法 |
| JP2006113687A (ja) * | 2004-10-12 | 2006-04-27 | Matsushita Electric Works Ltd | 自律移動システム |
Cited By (32)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019121365A (ja) * | 2018-01-05 | 2019-07-22 | アイロボット・コーポレーション | モバイル清掃ロボットの協同および永続マッピング |
| JP7436103B2 (ja) | 2018-01-05 | 2024-02-21 | アイロボット・コーポレーション | モバイル清掃ロボットの協同および永続マッピング |
| US11614746B2 (en) | 2018-01-05 | 2023-03-28 | Irobot Corporation | Mobile cleaning robot teaming and persistent mapping |
| JP2019128743A (ja) * | 2018-01-23 | 2019-08-01 | パナソニックIpマネジメント株式会社 | 移動装置、移動システム、移動装置の制御方法、及びプログラム |
| JP7145422B2 (ja) | 2018-01-23 | 2022-10-03 | パナソニックIpマネジメント株式会社 | 移動装置及び移動システム |
| US11320831B2 (en) | 2018-01-23 | 2022-05-03 | Panasonic Intellectual Property Management Co., Ltd. | Mover, mover control system, method of detecting object by mover, moving system, and method of controlling mover |
| CN111886641A (zh) * | 2018-03-19 | 2020-11-03 | 本田技研工业株式会社 | 管理系统及其控制方法、以及管理服务器 |
| WO2019181899A1 (ja) * | 2018-03-19 | 2019-09-26 | 本田技研工業株式会社 | 管理システム及びその制御方法並びに管理サーバ |
| US11869369B2 (en) | 2018-03-19 | 2024-01-09 | Honda Motor Co., Ltd. | Moving body and method for controlling same, and method for determining priority |
| JP7391833B2 (ja) | 2018-03-19 | 2023-12-05 | 本田技研工業株式会社 | 移動体及びその制御方法並びに優劣決定方法 |
| JPWO2019181900A1 (ja) * | 2018-03-19 | 2021-03-11 | 本田技研工業株式会社 | 移動体及びその制御方法並びに優劣決定方法 |
| JPWO2019181899A1 (ja) * | 2018-03-19 | 2020-10-01 | 本田技研工業株式会社 | 管理システム及びその制御方法並びに管理サーバ |
| WO2019181900A1 (ja) * | 2018-03-19 | 2019-09-26 | 本田技研工業株式会社 | 移動体及びその制御方法並びに優劣決定方法 |
| US11594139B2 (en) | 2018-03-19 | 2023-02-28 | Honda Motor Co., Ltd. | Management system, control method therefor, and management server |
| CN111886641B (zh) * | 2018-03-19 | 2022-10-18 | 本田技研工业株式会社 | 管理系统及其控制方法、以及管理服务器 |
| CN110320524A (zh) * | 2018-03-28 | 2019-10-11 | 北醒(北京)光子科技有限公司 | 一种多台光测距装置协同测距方法及系统 |
| CN110320524B (zh) * | 2018-03-28 | 2024-02-13 | 北醒(北京)光子科技有限公司 | 一种多台光测距装置协同测距方法及系统 |
| JPWO2019215838A1 (ja) * | 2018-05-09 | 2021-04-22 | 日本電気株式会社 | 自律動作機の制御装置、自律動作機の制御方法、及び、自律動作機の制御プログラム |
| US11740629B2 (en) | 2018-05-09 | 2023-08-29 | Nec Corporation | Control device for autonomous operating machines, control method for autonomous operating machines, and recording medium having control program for autonomous operating machines stored thereon |
| JP7070673B2 (ja) | 2018-05-09 | 2022-05-18 | 日本電気株式会社 | 自律動作機の制御装置、自律動作機の制御方法、及び、自律動作機の制御プログラム |
| JP2019198346A (ja) * | 2018-05-14 | 2019-11-21 | 日立グローバルライフソリューションズ株式会社 | 床面に沿って移動する移動体を含む移動体システム |
| JP7025990B2 (ja) | 2018-05-14 | 2022-02-25 | 日立グローバルライフソリューションズ株式会社 | 移動体、および、移動体の地図共有方法 |
| JP7176241B2 (ja) | 2018-06-15 | 2022-11-22 | トヨタ自動車株式会社 | 自律移動体、および自律移動体の制御プログラム |
| JP2019219735A (ja) * | 2018-06-15 | 2019-12-26 | トヨタ自動車株式会社 | 自律移動体、および自律移動体の制御プログラム |
| JP7255676B2 (ja) | 2019-05-17 | 2023-04-11 | 村田機械株式会社 | 搬送車システム、搬送車、及び、制御方法 |
| WO2020235392A1 (ja) * | 2019-05-17 | 2020-11-26 | 村田機械株式会社 | 搬送車システム、搬送車、及び、制御方法 |
| JPWO2020235392A1 (ja) * | 2019-05-17 | 2020-11-26 | ||
| CN113748392A (zh) * | 2019-05-17 | 2021-12-03 | 村田机械株式会社 | 输送车系统、输送车以及控制方法 |
| WO2021024726A1 (ja) * | 2019-08-07 | 2021-02-11 | パナソニックIpマネジメント株式会社 | 制御システム、制御方法、及びプログラム |
| JP7569987B2 (ja) | 2019-08-07 | 2024-10-21 | パナソニックIpマネジメント株式会社 | 制御システム、制御方法、及びプログラム |
| CN115043272A (zh) * | 2021-03-09 | 2022-09-13 | 三菱电机株式会社 | 管制系统和移动体 |
| CN115043272B (zh) * | 2021-03-09 | 2024-05-14 | 三菱电机株式会社 | 管制系统和移动体 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6880552B2 (ja) | 2021-06-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6880552B2 (ja) | 自律移動体システム | |
| JP6973393B2 (ja) | 移動体誘導システム、移動体、誘導装置およびコンピュータプログラム | |
| JP6603253B2 (ja) | 移動体制御システム、および移動体制御方法 | |
| CN106843223A (zh) | 一种智能化避障agv小车系统及避障方法 | |
| US20190337155A1 (en) | Plurality of robot cleaner and a controlling method for the same | |
| US20120035797A1 (en) | Autonomous moving body and control method thereof | |
| TWI732211B (zh) | 複數個自控式移動機器人及其控制方法 | |
| JP5848915B2 (ja) | 自動搬送車及びそれを用いた自動搬送車システム | |
| JP5247494B2 (ja) | 自律移動装置 | |
| CN109643128B (zh) | 移动体及移动体的控制方法 | |
| CN112367888A (zh) | 多个机器人清洁器及其控制方法 | |
| JP2005192609A (ja) | 自走式掃除機 | |
| KR20070109748A (ko) | 이동 로봇의 실내 지도 작성 장치 및 방법 | |
| EP3892426A1 (en) | Autonomously traveling mobile robot and traveling control method therefor | |
| JP2019148870A (ja) | 移動体管理システム | |
| JP2018185767A (ja) | 環境整備ロボットおよびその制御プログラム | |
| JP7255676B2 (ja) | 搬送車システム、搬送車、及び、制御方法 | |
| JP6348971B2 (ja) | 移動体 | |
| JP2014098948A (ja) | 自律移動装置及び自律移動方法 | |
| CN110609542A (zh) | 自主移动体和用于自主移动体的控制程序 | |
| JP2012014265A (ja) | 移動体 | |
| KR101303650B1 (ko) | 자율 주행 로봇을 이용한 지도 생성 방법, 이를 이용한 최적 주행 경로 산출 방법 및 이들을 수행하는 로봇 제어 장치 | |
| WO2022181488A1 (ja) | 自律移動装置、及び、自律移動システム | |
| JP7188207B2 (ja) | 自律走行車の走行制御方法 | |
| JP2020140594A (ja) | Slam誘導方式の無人作業車および無人作業システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20181220 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20191112 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20191119 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200630 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200821 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210112 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210301 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210406 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210419 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6880552 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |